2026, 13(1): 3-20.
doi: 10.1109/JAS.2025.125234
Abstract:
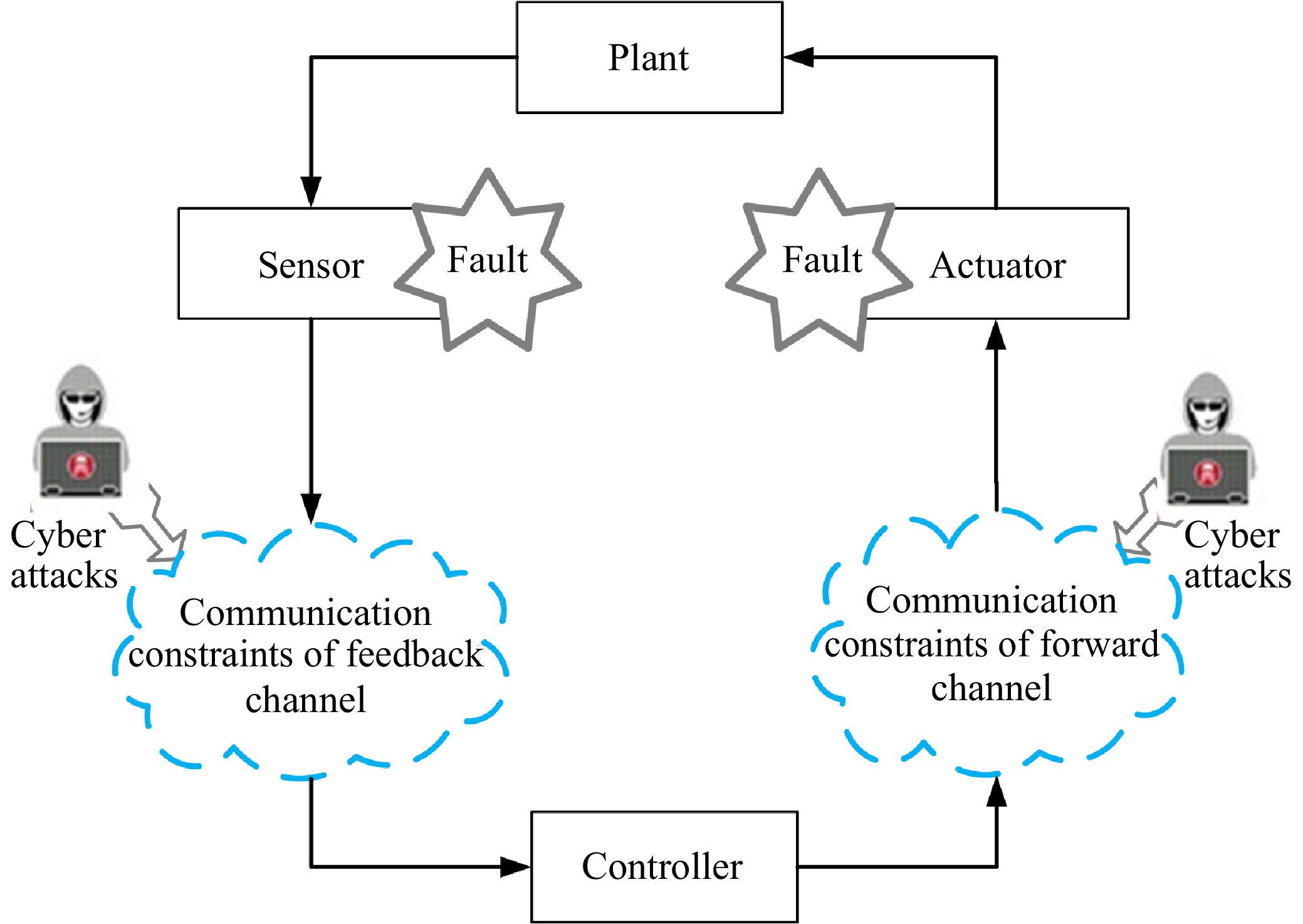
Networked predictive control (NPC) has gained significant attention in recent years for its ability to effectively and actively address communication constraints in networked control systems (NCSs), such as network-induced delays, packet dropouts, and packet disorders. Despite significant advancements, the increasing complexity and dynamism of network environments, along with the growing complexity of systems, pose new challenges for NPC. These challenges include difficulties in system modeling, cyber attacks, component faults, limited network bandwidth, and the necessity for distributed collaboration. This survey aims to provide a comprehensive review of NPC strategies. It begins with a summary of the primary challenges faced by NCSs, followed by an introduction to the control structure and core concepts of NPC. The survey then discusses several typical NPC schemes and examines their extensions in the areas of secure control, fault-tolerant control, distributed coordinated control, and event-triggered control. Moreover, it reviews notable works that have implemented these schemes. Finally, the survey concludes by exploring typical applications of NPC schemes and highlighting several challenging issues that could guide future research efforts.
Z.-H. Pang, T. Mu, Y. Yu, H. Guo, G.-P. Liu, and Q.-L. Han, “Networked predictive control: A survey,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 1, pp. 3–20, Jan. 2026. doi: 10.1109/JAS.2025.125234.













 E-mail Alert
E-mail Alert