A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 13
Issue 1
Volume 13
Issue 1
IEEE/CAA Journal of Automatica Sinica
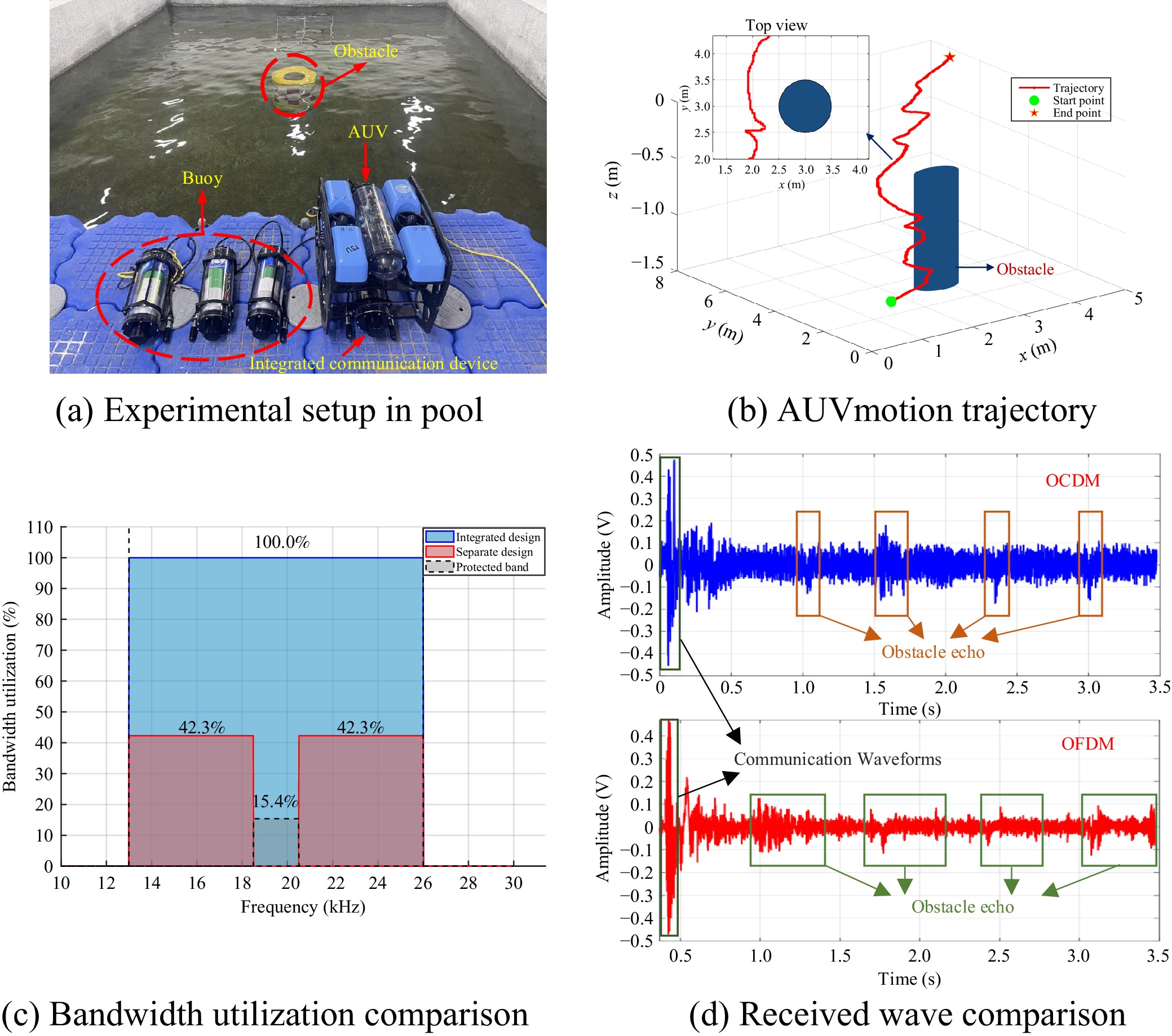
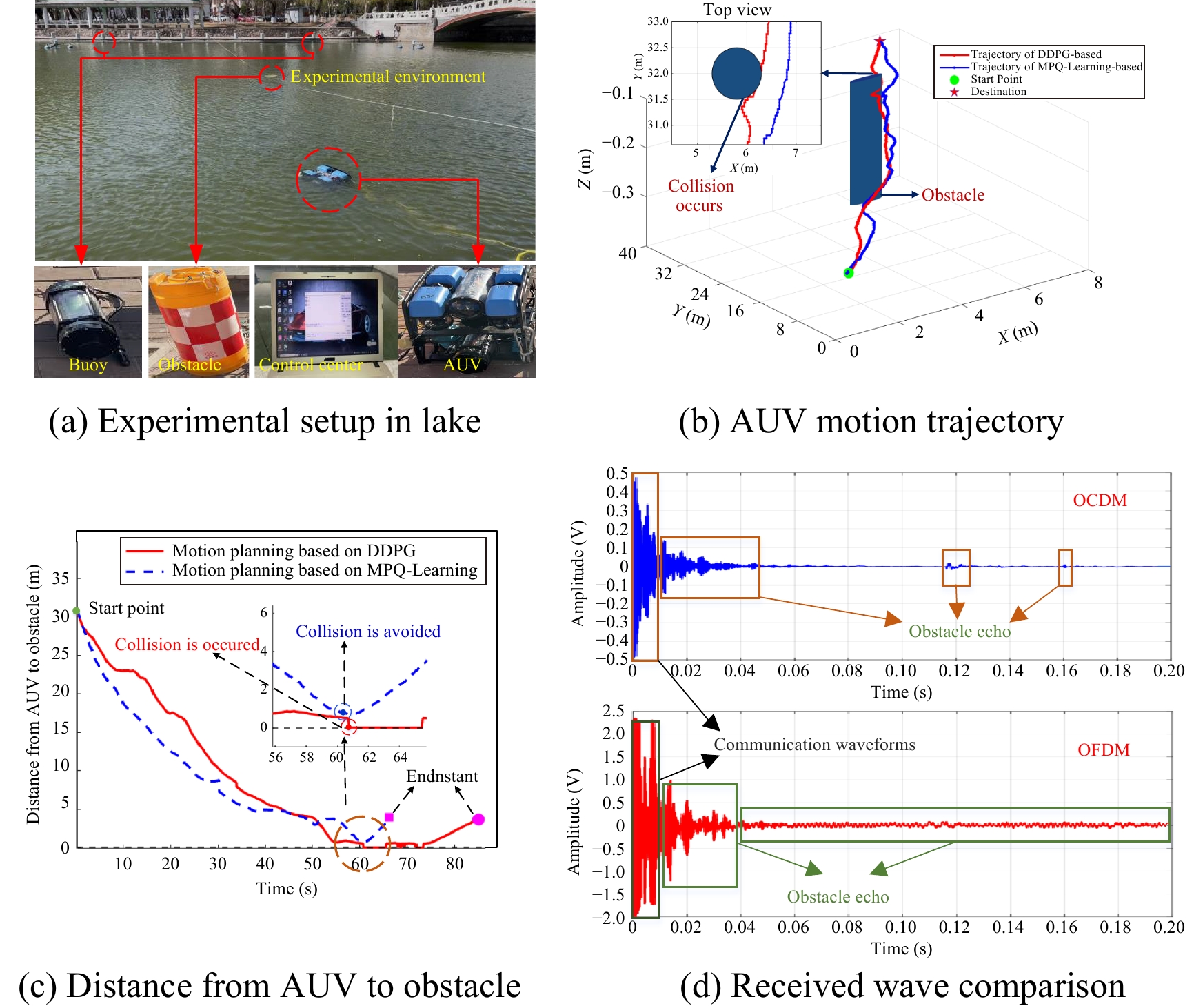
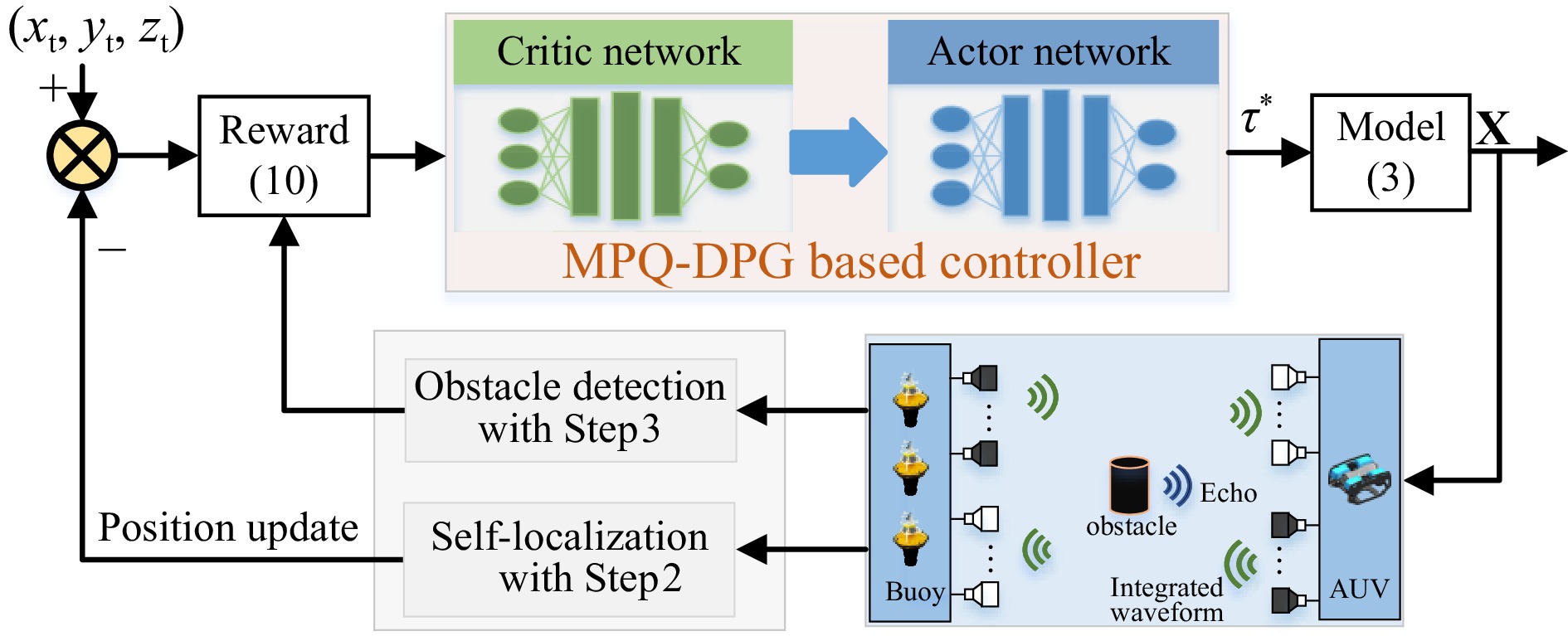
| Citation: | T. Guo, J. Yan, X. Yang, T. Zhang, and X. Guan, “Motion planning of an autonomous underwater vehicle via the integrated design of detection, communication and control,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 1, pp. 218–220, Jan. 2026. doi: 10.1109/JAS.2025.125543

|

| [1] |
R. Khalil, N. Saeed, M. Babar, T. Jan, and S. Din, “Bayesian multidimensional scaling for location awareness in hybrid-internet of underwater things,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 3, pp. 496–509, Mar. 2022. doi: 10.1109/JAS.2021.1004356
|
| [2] |
Z. Zhou, J. Liu, and J. Yu, “A survey of underwater multi-robot systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 1–18, Jan. 2022. doi: 10.1109/JAS.2021.1004269
|
| [3] |
Y. Liu, G. Liao, J. Xu, Z. Yang, and Y. Zhang, “Adaptive OFDM integrated radar and communications waveform design based on information theory,” IEEE Commun. Lett., vol. 21, no. 10, pp. 2174–2177, Oct. 2017. doi: 10.1109/LCOMM.2017.2723890
|
| [4] |
L. Yu, L. Qiao, and C. Shen, “High-speed obstacle avoidance of a large-scale underactuated autonomous underwater vehicle under a finite field of view,” IEEE Trans. Autom. Sci. Eng., vol. 22, pp. 1996–2005, Mar. 2024.
|
| [5] |
H. Wu, K. Zhang, X. Mei, et al., “Heuristic strategy-empowered real-time path following for autonomous surface vessel with adaptive line-of-sight guidance,” IEEE J. Ocean. Eng., vol. 50, no. 1, pp. 307–323, Jan. 2025. doi: 10.1109/JOE.2024.3447877
|
| [6] |
X. Yang, Y. Shi, W. Liu, H. Ye, W. Zhong, and Z. Xiang, “Global path planning algorithm based on double DQN for multi-tasks amphibious unmanned surface vehicle,” Ocean Eng., vol. 266, no. 1, pp. 1–14, May 2022.
|
| [7] |
J. Yan, L. Zhang, X. Yang, C. Chen, and X. Guan, “Communication-aware motion planning of AUV in obstacle-dense environment: A binocular vision-based deep learning method,” IEEE Trans. Intell. Transp. Syst., vol. 24, no. 12, pp. 14927–14943, Dec. 2023. doi: 10.1109/TITS.2023.3296415
|
| [8] |
S. Zhou and Z. Wang, OFDM for Underwater Acoustic Communications. Hoboken, USA: Wiley, 2014.
|
| [9] |
T. Guo, J. Yan, X. Yang, T. Zhang, and X. Guan, “Appendix for the integrated system,” Mar. 2025. [Online]. Available: https://drive.google.com/file/d/1zI_Eyp7Ebu4ou6r_kXQJPMPmkGfEaYi7/view?usp=sharing.
|
| [10] |
J. Yan, L. Cui, X. Yang, C. Chen, and X. Guan, “Design of an embedded system for integrated underwater communication and detection,” IEEE Embed. Syst. Lett., vol. 17, no. 2, pp. 83–86, Apr. 2025. doi: 10.1109/LES.2024.3485608
|
| [11] |
T. Guo, J. Yan, X. Yang, T. Zhang, and X. Guan, “Video of the experimental results,” Mar. 2025. [Online]. Available: https://www.youtube.com/watch?v=NE9A0fCXXmM.
|
Figures(3)






 DownLoad:
DownLoad: