2026,
13(4):
749-775.
doi: 10.1109/JAS.2026.125804
Abstract:
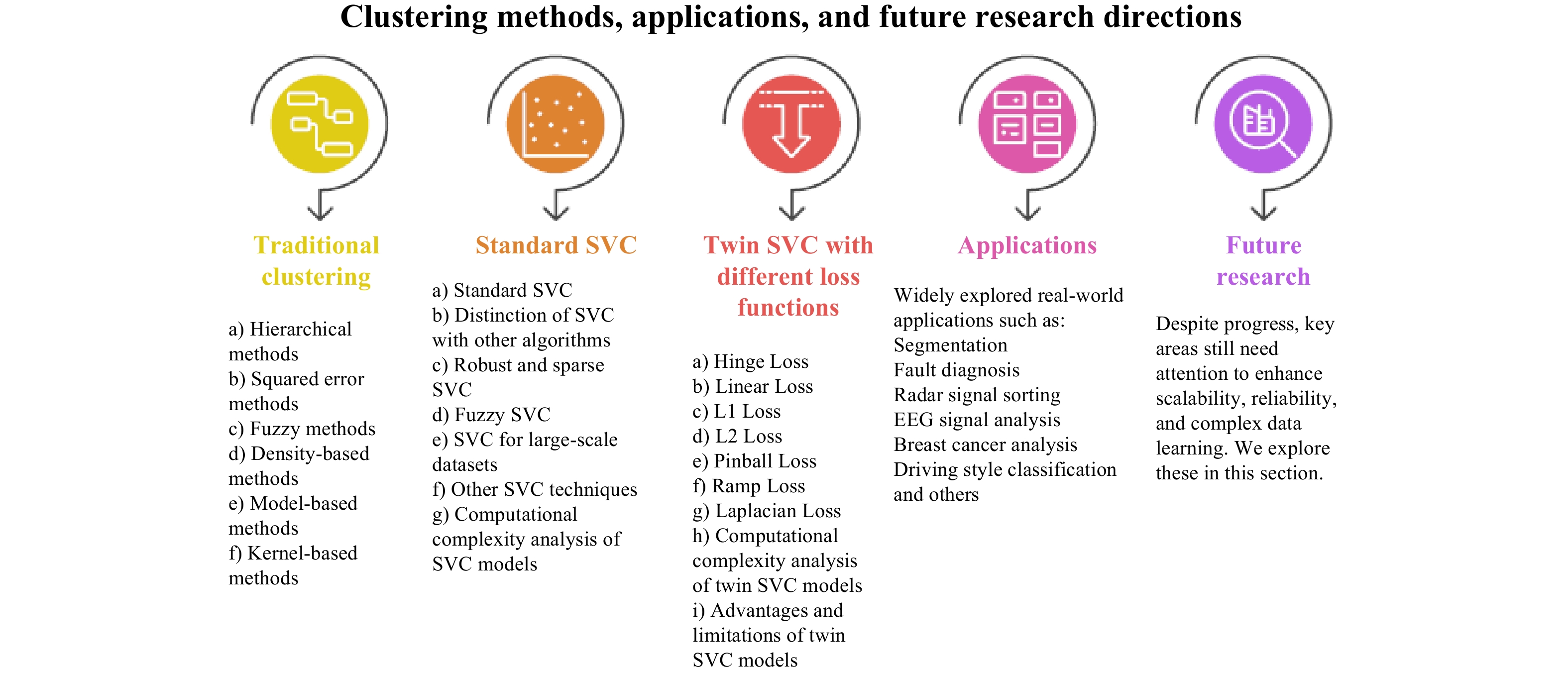
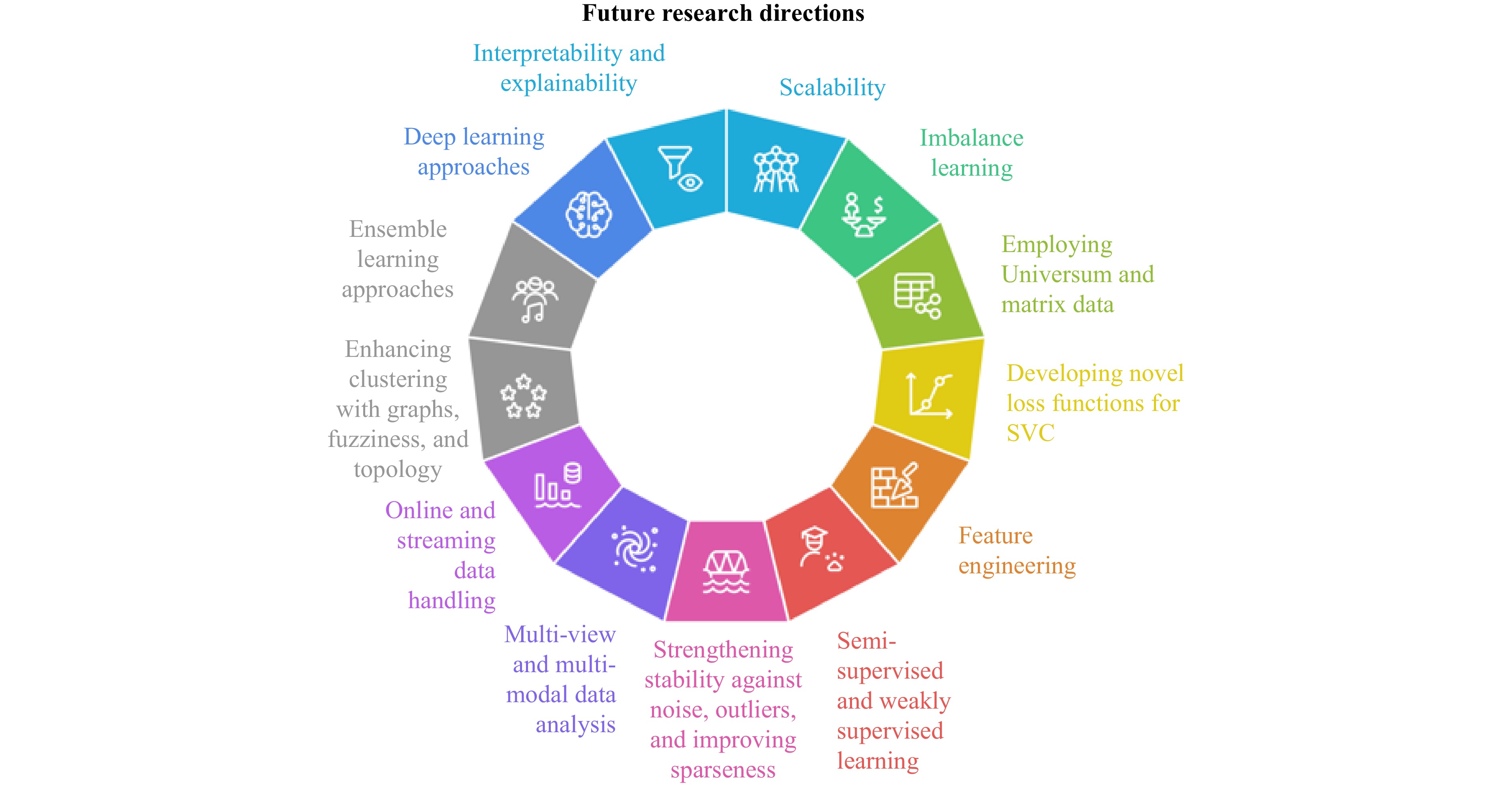
Support vector clustering (SVC) has emerged as a powerful unsupervised learning technique, derived from support vector machines (SVMs), offering a robust solution to a wide range of complex clustering challenges. Its unique ability to handle noise, outliers, and clusters of diverse, irregular shapes sets it apart from traditional clustering methods. SVC’s distinct advantage lies in its capacity to autonomously determine the optimal number of clusters without prior topological knowledge of the data. SVC maps data to a higher-dimensional space, encloses it in a minimal sphere, and identifies clusters when mapped back, supporting complex shapes and ensuring optimality through kernel functions. This review paper provides a comprehensive analysis of the SVC algorithms, exploring their variants such as robust, sparse, and fuzzy-based models and adaptations for large-scale data. Moreover, we analyze the potential of twin support vector clustering (TWSVC), with an emphasis on the use of various loss functions. Finally, the paper explores emerging trends and outlines promising future research directions for both SVC and twin SVC. These include advancements in feature engineering, extension to semi-supervised and weakly supervised learning, and the integration of multi-view and multi-modal data. Our work aims to deepen the understanding of SVC, fostering advancements that address the evolving needs of clustering in real-world scenarios.
M. Tanveer, M. Tabish, A. Kumari, A. K. Malik, and W. Ding, “Support vector clustering uncovered: Insights, challenges, and future outlook,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 4, pp. 749–775, Apr. 2026. doi: 10.1109/JAS.2026.125804.















 E-mail Alert
E-mail Alert