A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 12
Issue 11
Volume 12
Issue 11
IEEE/CAA Journal of Automatica Sinica
| Citation: | X. Liu and Z. Wang, “Optimal Lyapunov function and minimum amplitude control for disturbed linear systems,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 11, pp. 2264–2274, Nov. 2025. doi: 10.1109/JAS.2025.125252

|

| [1] |
B. Wu, High-Power Converters and AC Drives. New Jersey, USA: IEEE Press, 2006.
|
| [2] |
M. C. Obaiah and B. Subudhi, “A delay-dependent anti-windup compensator for wide-area power systems with time-varying delays and actuator saturation,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 106–117, Jan. 2020. doi: 10.1109/JAS.2019.1911558
|
| [3] |
X. Lyu and Z. Lin, “PID control of planar nonlinear uncertain systems in the presence of actuator saturation,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 90–98, Jan. 2022. doi: 10.1109/JAS.2021.1004281
|
| [4] |
G. W. Gabriel, T. R. Goncalves, and J. C. Geromel, “Optimal and robust sampled-data control of Markov jump linear systems: A differential LMI approach,” IEEE Trans. Autom. Control, vol. 63, no. 9, pp. 3054–3060, Sept. 2018. doi: 10.1109/TAC.2018.2797212
|
| [5] |
J. C. Geromel, P. Colaneri, and P. Bolzern, “Differential linear matrix inequality in optimal sampled-data control,” Automatica, vol. 100, pp. 289–298, 2019. doi: 10.1016/j.automatica.2018.11.021
|
| [6] |
H. Dong, Z. Wang, S. Ding, and H. Gao, “On H∞ estimation of randomly occurring faults for a class of nonlinear time-varying systems with fading channels,” IEEE Trans. Autom. Control, vol. 61, no. 2, pp. 479–484, Feb. 2016. doi: 10.1109/TAC.2015.2437526
|
| [7] |
E. Tian, Z. Wang, L. Zou, and D. Yue, “Chance-constrained H∞ control for a class of time-varying systems with stochastic nonlinearities: The finite-horizon case,” Automatica, vol. 107, pp. 296–305, Jun. 2019. doi: 10.1016/j.automatica.2019.05.039
|
| [8] |
A. Polański, “On infinity norms as Lyapunov functions for linear systems,” IEEE Trans. Autom. Control, vol. 40, no. 7, pp. 1270–1274, Jul. 1995. doi: 10.1109/9.400479
|
| [9] |
X. Liu and Z. Wang, “Calculation of the system H∞ norm: A Lyapunov function optimization method,” Acta Autom. Sinica, vol. 45, no. 8, pp. 1606–1610, Aug. 2019.
|
| [10] |
F. Amato, R. Ambrosino, M. Ariola, G. D. Tommasi, A. Pironti, “On the finite-time boundedness of linear systems,” Automatica, vol. 107, pp. 454–466, Jul. 2019. doi: 10.1016/j.automatica.2019.06.002
|
| [11] |
Y. Hosoe and T. Hagiwara, “Equivalent stability notions, Lyapunov inequality, and its application in discrete-time linear systems with stochastic dynamics determined by an i.i.d. process,” IEEE Trans. Autom. Control, vol. 64, no. 11, pp. 4764–4771, Nov. 2019. doi: 10.1109/TAC.2019.2905216
|
| [12] |
Y. Ju, D. Ding, X. He, Q. Han, and G. Wei, “Consensus control of multi-agent systems using fault-estimation-in-the-Loop: Dynamic event-triggered case,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 8, pp. 1440–1451, Aug. 2022. doi: 10.1109/JAS.2021.1004386
|
| [13] |
S. Tarbouriech, I. Queinnec, T. Alamo, M. Fiacchini, and E. F. Camacho, “Ultimate bounded stability and stabilization of linear systems interconnected with generalized saturated functions,” Automatica, vol. 47, pp. 1473–1481, Mar. 2011. doi: 10.1016/j.automatica.2011.02.020
|
| [14] |
X. Zhao, S. Zou, and Z. Ma, “Decentralized resilient H∞ load frequency control for cyber-physical power systems under DoS attacks,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 11, pp. 1737–1751, Nov. 2021. doi: 10.1109/JAS.2021.1004162
|
| [15] |
H. L. Trentelman, K. Takaba, and N. Monshizadeh, “Robust synchronization of uncertain linear multi-agent systems,” IEEE Trans. Autom. Control, vol. 58, no. 6, pp. 1511–1523, Jun. 2013. doi: 10.1109/TAC.2013.2239011
|
| [16] |
C. Xiang, S. Ma, S. Kuang, and D. Dong, “Coherent H∞ control for linear quantum systems with uncertainties in the interaction Hamiltonian,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 432–440, Feb. 2021. doi: 10.1109/JAS.2020.1003429
|
| [17] |
A. Selivanov and E. Fridman, “Boundary observers for a reaction-diffusion system under time-delayed and sampled-data measurements,” IEEE Trans. Autom. Control, vol. 64, no. 8, pp. 3385–3390, Aug. 2019. doi: 10.1109/TAC.2018.2877381
|
| [18] |
M. M. Peet, “A dual to Lyapunov’s second method for linear systems with multiple delays and implementation using SOS,” IEEE Trans. Autom. Control, vol. 64, no. 3, pp. 944–959, Mar. 2019. doi: 10.1109/TAC.2018.2832470
|
| [19] |
M. Hejri, “Global practical stabilization of discrete-time switched affine systems via a general quadratic Lyapunov function and a decentralized ellipsoid,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 11, pp. 1837–1851, Nov. 2021. doi: 10.1109/JAS.2021.1004183
|
| [20] |
A. Argha, S. W. Su, and B. G. Celler, “Control allocation-based fault tolerant control,” Automatica, vol. 103, pp. 408–417, Feb. 2019. doi: 10.1016/j.automatica.2019.02.014
|
| [21] |
H. Zhang, J. Han, Y. Wang, and H. Jiang, “H∞ consensus for linear heterogeneous discrete-time multiagent systems with output feedback control,” IEEE Trans. Cybern., vol. 49, no. 10, pp. 3713–3721, Oct. 2019. doi: 10.1109/TCYB.2018.2849361
|
| [22] |
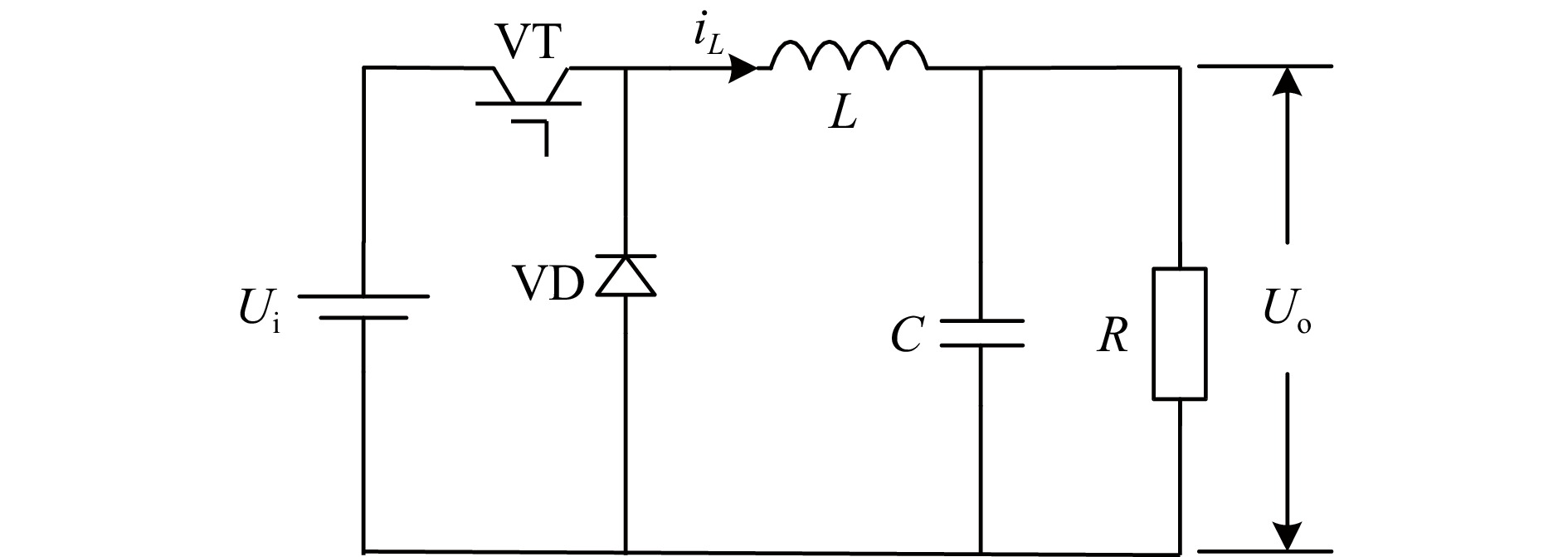
D. Xu, H. Ma, and Y. Wang, Power Electronics. Beijing, China: China Science Press, 2006.
|
Figures(4) / Tables(3)






 DownLoad:
DownLoad: