2025, 12(11): 2300-2313.
doi: 10.1109/JAS.2024.125088
Abstract:
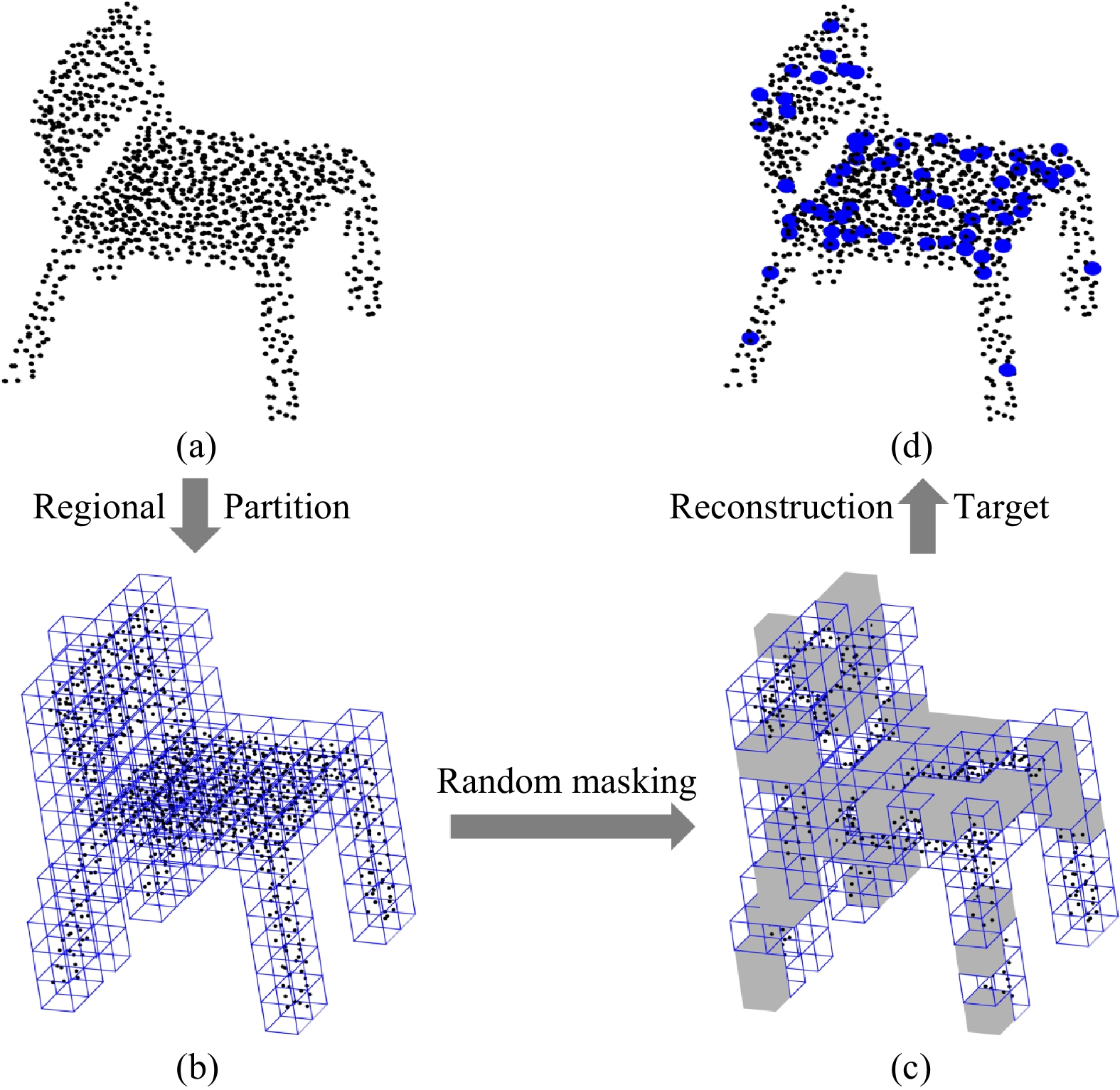
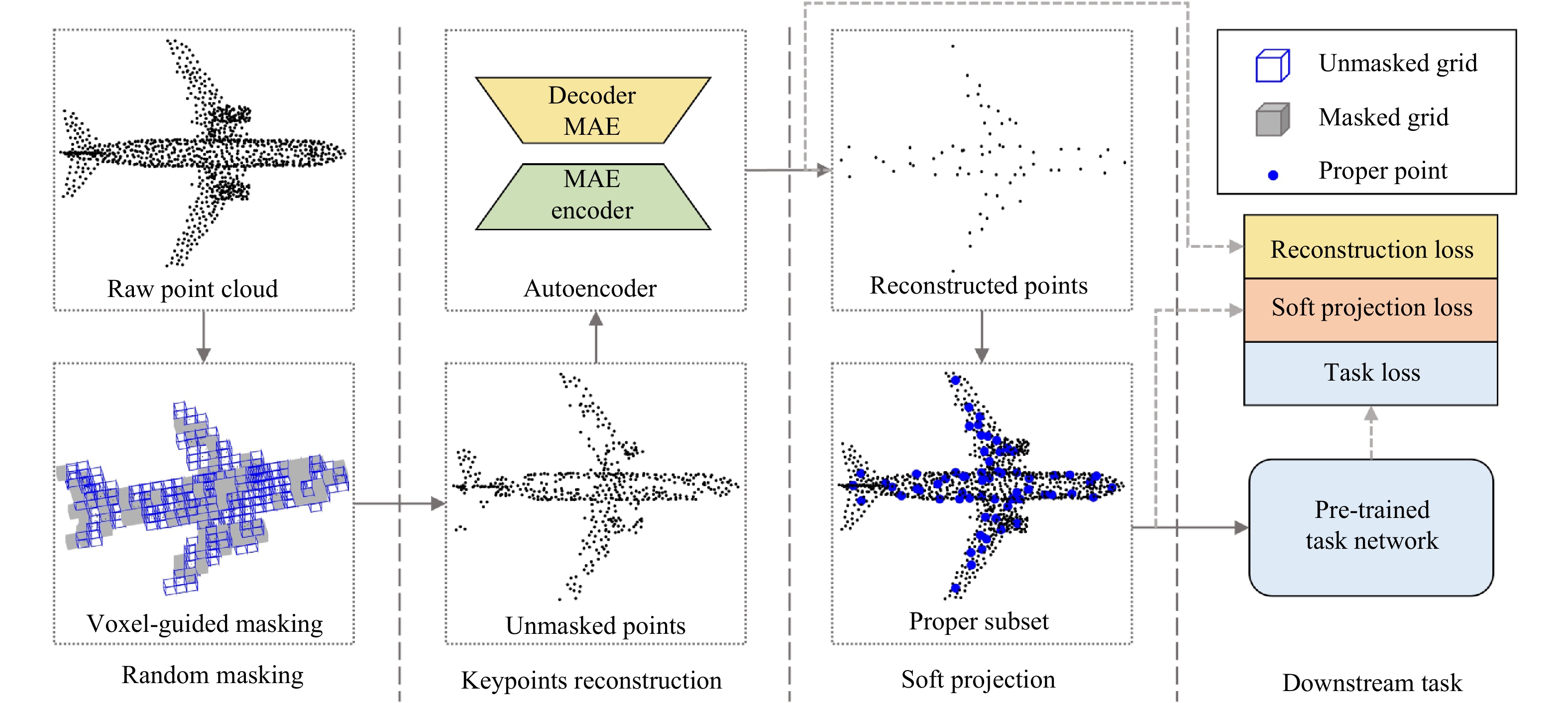
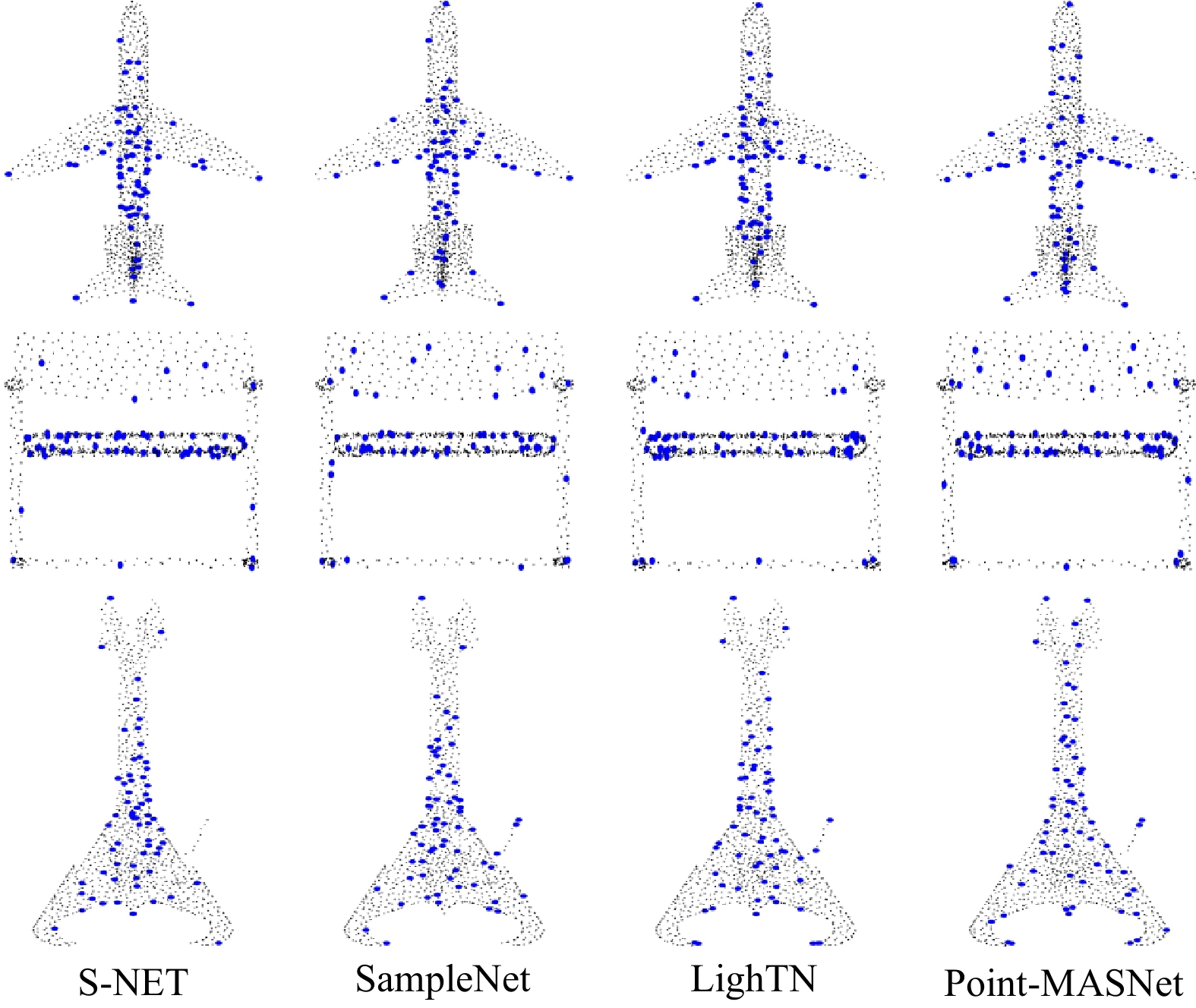
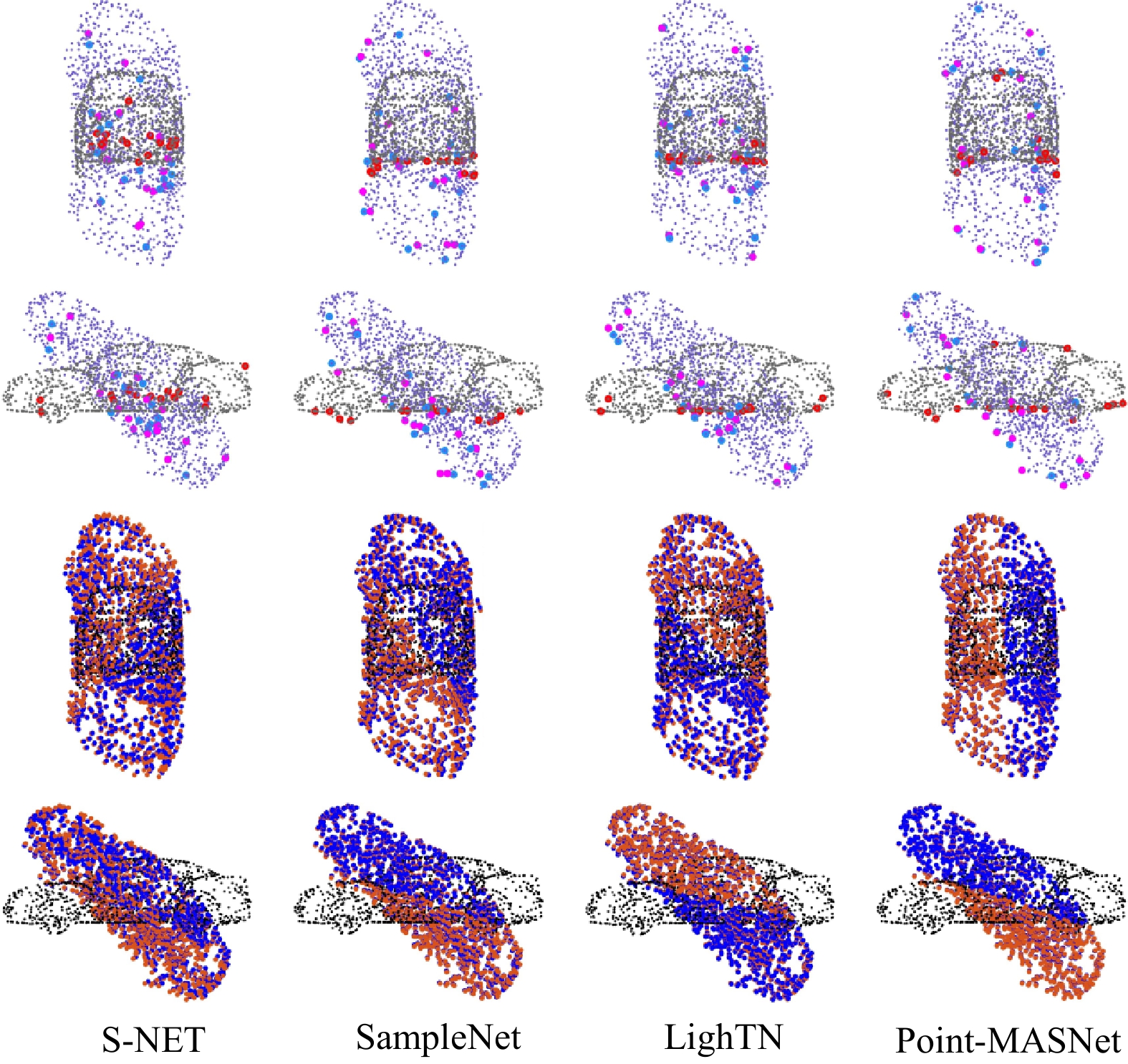
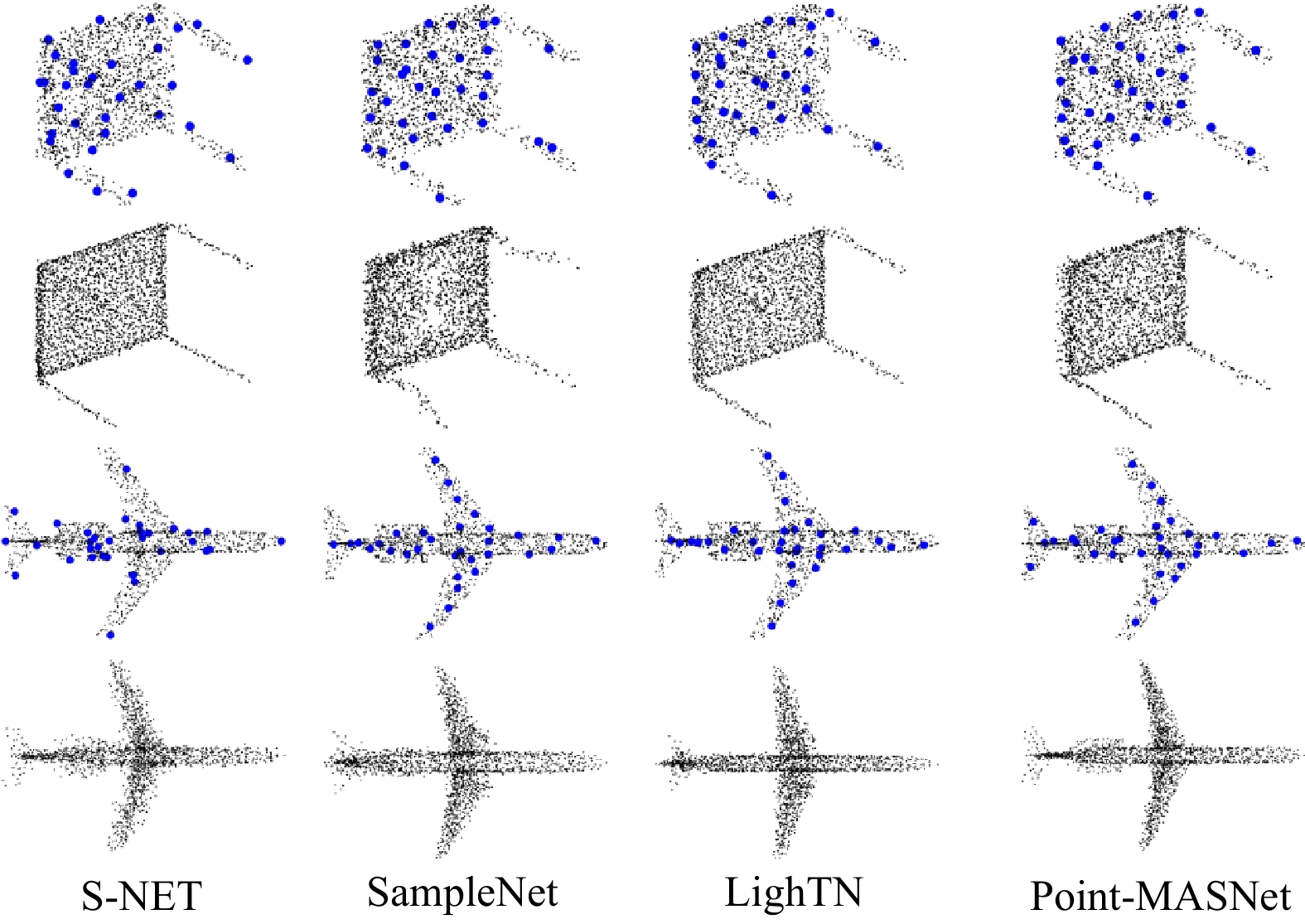
Task-oriented point cloud sampling aims to select a representative subset from the input, tailored to specific application scenarios and task requirements. However, existing approaches rarely tackle the problem of redundancy caused by local structural similarities in 3D objects, which limits the performance of sampling. To address this issue, this paper introduces a novel task-oriented point cloud masked autoencoder-based sampling network (Point-MASNet), inspired by the masked autoencoder mechanism. Point-MASNet employs a voxel-based random non-overlapping masking strategy, which allows the model to selectively learn and capture distinctive local structural features from the input data. This approach effectively mitigates redundancy and enhances the representativeness of the sampled subset. In addition, we propose a lightweight, symmetrically structured keypoint reconstruction network, designed as an autoencoder. This network is optimized to efficiently extract latent features while enabling refined reconstructions. Extensive experiments demonstrate that Point-MASNet achieves competitive sampling performance across classification, registration, and reconstruction tasks.
X. Wang, Y. Jin, H. Yu, Y. Cen, T. Wang, and Y. Li, “Point-MASNet: Masked autoencoder-based sampling network for 3D point cloud,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 11, pp. 2300–2313, Nov. 2025. doi: 10.1109/JAS.2024.125088.










 E-mail Alert
E-mail Alert