A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 13
Issue 1
Volume 13
Issue 1
IEEE/CAA Journal of Automatica Sinica
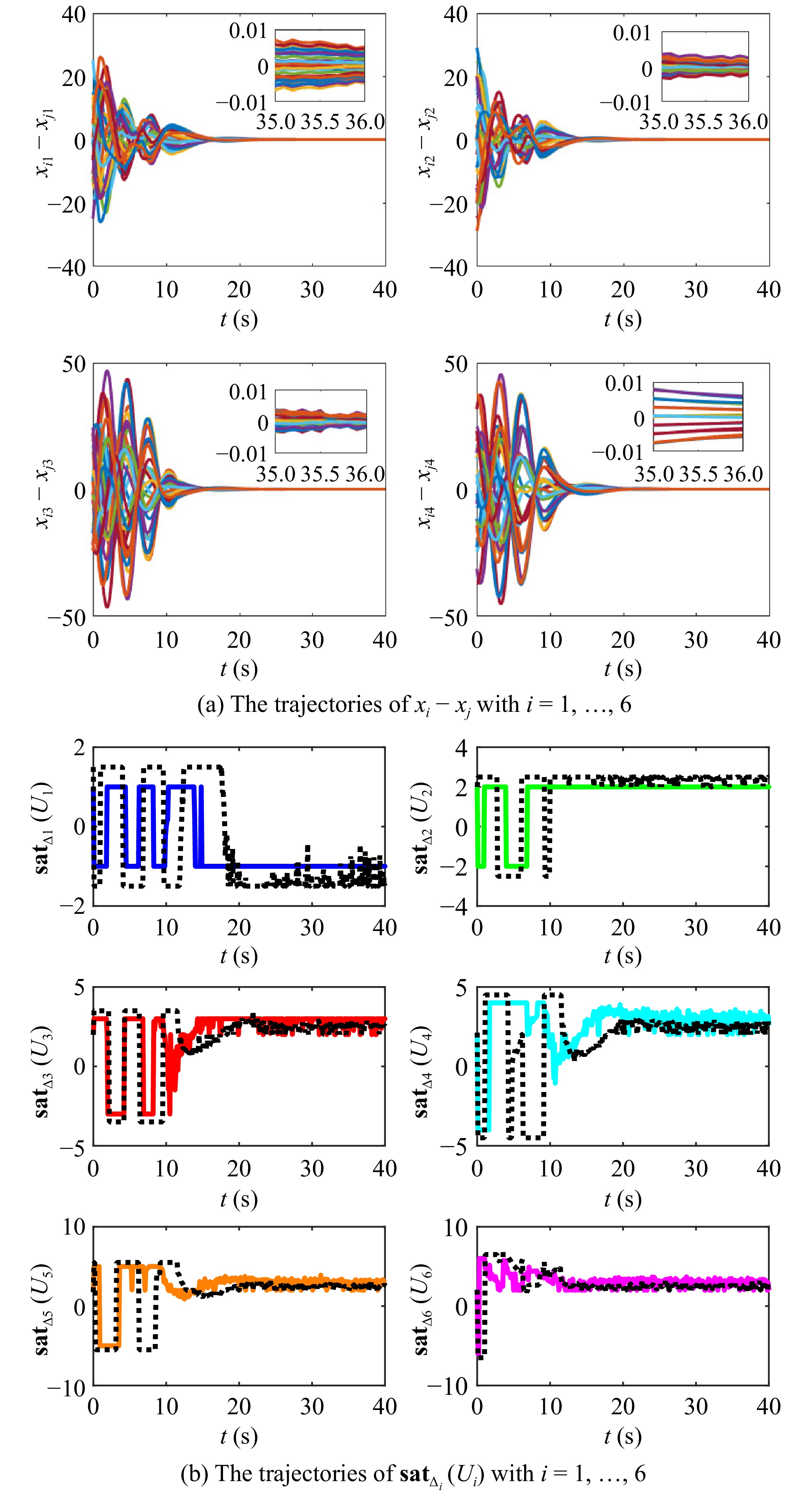
| Citation: | X. Wang and S. Zhu, “A novel distributed controller design for robust global coordination of MASs with heterogeneous saturation,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 1, pp. 230–232, Jan. 2026. doi: 10.1109/JAS.2025.125663

|

| [1] |
T. Vicsek, A. Czirók, E. Ben-Jacob, I. Cohen, and O. Shochet, “Novel type of phase transition in a system of self-driven particles,” Physical Review Letters, vol. 75, no. 6, p. 1226, 1995. doi: 10.1103/PhysRevLett.75.1226
|
| [2] |
R. Mach and F. Schweitzer, “Multi-agent model of biological swarming,” in Proc. European Conf. Artificial Life, 2003, pp. 810–820.
|
| [3] |
Q. Luo and H. Duan, “An improved artificial physics approach to multiple UAVs/UGVs heterogeneous coordination,” Science China Tech. Sciences, vol. 56, pp. 2473–2479, 2013. doi: 10.1007/s11431-013-5314-2
|
| [4] |
Z.-M. Wang, X. Zhao, X. Li, and A. Wei, “Finite-time adaptive control for uncertain switched port-controlled hamiltonian systems,” Communications in Nonlinear Science and Numerical Simulation, vol. 119, p. 107129, 2023. doi: 10.1016/j.cnsns.2023.107129
|
| [5] |
S. Wu and X. Li, “Finite-time stabilization of nonlinear systems with actuator saturation,” IEEE Trans. Autom. Science and Eng., vol. 22, pp. 7582–7589, 2024.
|
| [6] |
Y. Su, Q. Wang, and C. Sun, “Self-triggered consensus control for linear multi-agent systems with input saturation,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 150–157, 2019.
|
| [7] |
H. Su, M. Z. Chen, J. Lam, and Z. Lin, “Semi-global leader-following consensus of linear multi-agent systems with input saturation via low gain feedback,” IEEE Trans. Circuits and Systems I: Regular Papers, vol. 60, no. 7, pp. 1881–1889, 2013. doi: 10.1109/TCSI.2012.2226490
|
| [8] |
X. Wang, G.-P. Jiang, H. Su, and X. Wang, “Robust global coordination of networked systems with input saturation and external disturbances,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 51, no. 12, pp. 7788–7800, 2020.
|
| [9] |
X. Wang and X. Wang, “Global consensus tracking of discrete-time saturated networked systems via nonlinear feedback laws,” J. Franklin Institute, vol. 356, no. 2, pp. 722–733, 2019. doi: 10.1016/j.jfranklin.2017.09.030
|
| [10] |
H.-X. Hu, G. Wen, G. Chen, Y. Chen, and X. Yu, “Output bipartite consensus for second-order heterogeneous uncertain agents with state-dependent cooperation-competition interactions,” IEEE Trans. Control Network Systems, vol. 10, no. 2, pp. 912–925, 2022.
|
| [11] |
H. Su, M. Z. Chen, and X. Wang, “Global coordinated tracking of multi-agent systems with disturbance uncertainties via bounded control inputs,” Nonlinear Dynamics, vol. 82, no. 4, pp. 2059–2068, 2015. doi: 10.1007/s11071-015-2299-3
|
| [12] |
Z. Zhao and Z. Lin, “Global leader-following consensus of a group of general linear systems using bounded controls,” Automatica, vol. 68, pp. 294–304, 2016. doi: 10.1016/j.automatica.2016.01.027
|
| [13] |
X. Wang, J. Qian, H. Su, X. Lu, and J. Lam, “Distributed global consensus of LTI MASs with heterogeneous actuator saturation and communication noises,” SIAM J. Control and Optimization, vol. 62, no. 3, pp. 1690–1716, 2024. doi: 10.1137/23M1584678
|
| [14] |
D. B. West, Introduction to Graph Theory, Upper Saddle River, USA: Prentice Hall, 2001, vol. 2.
|
| [15] |
X. Wang, H. Su, M. Z. Chen, and X. Wang, “Observer-based robust coordinated control of multiagent systems with input saturation,” IEEE Trans. Neural Networks and Learning Systems, vol. 29, no. 5, pp. 1933–1946, 2017.
|
| [16] |
Z. Lin, Low Gain Feedback, vol. 240, Berlin, Germany: Springer, 1999.
|
Figures(2)






 DownLoad:
DownLoad: