A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 13
Issue 1
Volume 13
Issue 1
IEEE/CAA Journal of Automatica Sinica
| Citation: | X. You, S. Dian, B. Guo, Q. Xiao, Y. Zhu, and K. Liu, “Novel finite-time adaptive fuzzy fault-tolerant control for fractional-order nonlinear systems and its applications,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 1, pp. 123–136, Jan. 2026. doi: 10.1109/JAS.2025.125852

|

| [1] |
I. Pudlubny, Fractional Differential Equations. Academic Press, 1999.
|
| [2] |
Q. Song, Y. Chen, Z. Zhao, Y. Liu, and F. E. Alsaadi, “Robust stability of fractional-order quaternion-valued neural networks with neutral delays and parameter uncertainties,” Neurocomputing, vol. 420, pp. 70–81, Jan. 2021. doi: 10.1016/j.neucom.2020.08.059
|
| [3] |
W. Chen, H. Dai, Y. Song, and Z. Zhang, “Convex Lyapunov functions for stability analysis of fractional order systems,” IET Control Theory and Applications, vol. 11, pp. 1070–1074, Apr. 2017. doi: 10.1049/iet-cta.2016.0950
|
| [4] |
J. Hou, R. Xi, P. Liu, and T. Liu, “The switching fractional order chaotic system and its application to image encryption,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 2, pp. 381–388, Apr. 2017. doi: 10.1109/JAS.2016.7510127
|
| [5] |
A. Mujumdar, B. Tamhane, and S. Kurode, “Observer-based sliding mode control for a class of noncommensurate fractional-order systems,” IEEE/ASME Trans. Mechatronics, vol. 20, pp. 2504–2512, Oct. 2015. doi: 10.1109/TMECH.2014.2386914
|
| [6] |
L. Yao, Z. Guan, Y. Wang, H. Hui, S. Luo, C. Jia, X. You, and X. Xiao, “Evaluating the feasibility of concentrated solar power as a replacement for coal-fired power in China: A comprehensive comparative analysis,” Applied Energy, vol. 377, p. 124396, Jan. 2025. doi: 10.1016/j.apenergy.2024.124396
|
| [7] |
R. Olfati-Saber, “Normal forms for underactuated mechanical systems with symmetry,” IEEE Trans. Autom. Control, vol. 47, no. 2, pp. 305–308, Feb. 2002. doi: 10.1109/9.983365
|
| [8] |
M. Ghorbani, M. Tavakoli-Kakhki, A. Tepljakov, and E. Petlenkov, “Robust stability analysis of smith predictor based interval fractional-order control systems: A case study in level control process,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 762–780, Mar. 2023. doi: 10.1109/JAS.2022.105986
|
| [9] |
K. Rsetam, Z. Cao, and Z. Man, “Design of robust terminal sliding mode control for underactuated flexible joint robot,” IEEE Trans. Systems, Man, and Cybernetics: Systems, vol. 52, no. 7, pp. 4272–4285, Jul. 2022. doi: 10.1109/TSMC.2021.3096835
|
| [10] |
X. Liang, Y. Yan, W. Wang, T. Su, G. He, G. Li, and Z.-G. Hou, “Adaptive human-robot interaction torque estimation with high accuracy and strong tracking ability for a lower limb rehabilitation robot,” IEEE/ASME Trans. Mechatronics, vol. 29, no. 6, pp. 4814–4825, Dec. 2024. doi: 10.1109/TMECH.2024.3394491
|
| [11] |
H. Liu, H. Dong, and Y. Pan, “Reduced-order observer-based adaptive fuzzy self-triggered control for fractional order nonlinear systems without feasibility conditions,” IEEE Trans. Systems, Man, and Cybernetics: Systems, vol. 54, p. 7, Jul. 2024.
|
| [12] |
D. Li and J. Dong, “Fuzzy weight-based reinforcement learning for event-triggered optimal backstepping control of fractional-order nonlinear systems,” IEEE Trans. Fuzzy Systems, vol. 32, no. 1, pp. 214–225, Jan. 2024. doi: 10.1109/TFUZZ.2023.3294928
|
| [13] |
W. Yan, T. Zhao, B. Niu, and X. Wang, “Adaptive T-S fuzzy control for an unknown structure system with a self-adjusting control accuracy,” IEEE Trans. Autom. Science and Engineering, vol. 22, pp. 944–957, Jan. 2025. doi: 10.1109/TASE.2024.3356752
|
| [14] |
W. Yang, W. Yu, Y. Lv, L. Zhu, and T. Hayat, “Adaptive fuzzy tracking control design for a class of uncertain nonstrict-feedback fractional-order nonlinear SISO systems,” IEEE Trans. Cybernetics, vol. 51, no. 6, pp. 3039–3053, Jun. 2021. doi: 10.1109/TCYB.2019.2931401
|
| [15] |
M. Wei, Y. X. Li, and S. Tong, “Event-triggered adaptive neural control of fractional-order nonlinear systems with full-state constraints,” Neurocomputing, vol. 412, pp. 320–326, Oct. 2020. doi: 10.1016/j.neucom.2020.06.082
|
| [16] |
C. Wang, L. Cui, M. Liang, J. Li, and Y. Wang, “Adaptive neural network control for a class of fractional-order nonstrict-feedback nonlinear systems with full-state constraints and input saturation,” IEEE Trans. Neural Networks and Learning Systems, vol. 33, no. 11, pp. 6677–6689, Nov. 2022. doi: 10.1109/TNNLS.2021.3082984
|
| [17] |
C. Hua, J. Ning, G. Zhao, and Y. Li, “Output feedback NN tracking control for fractional-order nonlinear systems with time-delay and input quantization,” Neurocomputing, vol. 290, pp. 229–237, May 2018. doi: 10.1016/j.neucom.2018.02.047
|
| [18] |
Z. Ma and H. Ma, “Adaptive fuzzy backstepping dynamic surface control of strict-feedback fractional-order uncertain nonlinear systems,” IEEE Trans. Fuzzy Systems, vol. 28, no. 1, pp. 122–133, Jan. 2020. doi: 10.1109/TFUZZ.2019.2900602
|
| [19] |
S. Sui, C. L. Chen, and S. Tong, “Neural-network-based adaptive DSC design for switched fractional-order nonlinear systems,” IEEE Trans. Neural Networks and Learning Systems, vol. 32, no. 10, pp. 4703–4712, Oct. 2021. doi: 10.1109/TNNLS.2020.3027339
|
| [20] |
C. Zhang and G. Yang, “Event-triggered adaptive output feedback control for a class of uncertain nonlinear systems with actuator failures,” IEEE Trans. Cybernetics, vol. 50, no. 1, pp. 201–210, Jan. 2020. doi: 10.1109/TCYB.2018.2868169
|
| [21] |
B. Niu, J. Sui, X. Zhao, D. Wang, X. Zhao, and Y. Niu, “Adaptive fuzzy practical predefined-time bipartite consensus tracking control for heterogeneous nonlinear MASs with actuator faults,” IEEE Trans. Fuzzy Systems, vol. 32, pp. 3071–3083, May 2024. doi: 10.1109/TFUZZ.2024.3367305
|
| [22] |
L. Cao, Q. Zhou, G. Dong, and H. Li, “Observer-based adaptive event-triggered control for nonstrict-feedback nonlinear systems with output constraint and actuator failures,” IEEE Trans. Systems, Man, and Cybernetics: Systems, vol. 51, no. 3, pp. 1380–1391, Mar. 2021. doi: 10.1109/TSMC.2019.2895858
|
| [23] |
S. Tong, B. Huo, and Y. Li, “Observer-based adaptive decentralized fuzzy fault-tolerant control of nonlinear large-scale systems with actuator failures,” IEEE Trans. Fuzzy Systems, vol. 22, no. 1, pp. 1−15, Feb. 2014.
|
| [24] |
H. Wang, W. Bai, and P. X. Liu, “Finite-time adaptive fault-tolerant control for nonlinear systems with multiple faults,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 6, pp. 1417–1427, Nov. 2019. doi: 10.1109/JAS.2019.1911765
|
| [25] |
H. Wang, P. X. Liu, X. Zhao, and X. Liu, “Adaptive fuzzy finite-time control of nonlinear systems with actuator faults,” IEEE Trans. Cybernetics, vol. 50, pp. 1786–1797, May 2020. doi: 10.1109/TCYB.2019.2902868
|
| [26] |
H. Liu, Y. Pan, J. Cao, H. Wang, and Y. Zhou, “Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults,” IEEE Trans. Neural Networks and Learning Systems, vol. 31, no. 12, pp. 5166–5177, Dec. 2020. doi: 10.1109/TNNLS.2020.2964044
|
| [27] |
Y. X. Li, Q. Y. Wang, and S. Tong, “Fuzzy adaptive fault-tolerant control of fractional-order nonlinear systems,” IEEE Trans. Systems, Man, and Cybernetics: Systems, vol. 51, no. 3, pp. 1372–1379, Mar. 2021.
|
| [28] |
S. Sui and S. Tong, “FTC design for switched fractional-order nonlinear systems: An application in a permanent magnet synchronous motor system,” IEEE Trans. Cybernetics, vol. 53, no. 4, pp. 2506–2515, Apr. 2023. doi: 10.1109/TCYB.2021.3123377
|
| [29] |
H. Cheng, X. Huang, and Z. Li, “Unified neuroadaptive fault-tolerant control of fractional-order systems with or without state constraints,” Neurocomputing, vol. 524, pp. 117–125, Mar. 2023. doi: 10.1016/j.neucom.2022.12.035
|
| [30] |
C. Hou, X. Liu, and H. Wang, “Adaptive fault tolerant control for a class of uncertain fractional-order systems based on disturbance observer,” Int. J. Robust and Nonlinear Control, vol. 30, no. 8, pp. 3436–3450, Feb. 2020. doi: 10.1002/rnc.4950
|
| [31] |
L. Wang and J. Dong, “Reset event-triggered adaptive fuzzy consensus for nonlinear fractional-order multiagent systems with actuator faults,” IEEE Trans. Cybernetics, vol. 53, no. 3, pp. 1868–1879, Mar. 2023. doi: 10.1109/TCYB.2022.3163528
|
| [32] |
W. Yang, W. X. Zheng, and W. Yu, “Observer-based event-triggered adaptive fuzzy control for fractional-order time-varying delayed MIMO systems against actuator faults,” IEEE Trans. Fuzzy Systems, vol. 30, no. 12, pp. 5445–5459, Dec. 2022. doi: 10.1109/TFUZZ.2022.3177794
|
| [33] |
W. Bi, “Neural networks adaptive control for fractional-order non-linear system with unmodelled dynamics and actuator faults,” IET Control Theory and Applications, vol. 17, no. 3, pp. 259–269, Feb. 2023.
|
| [34] |
F. Du and J. G. Lu, “Finite-time synchronization of fractional-order delayed fuzzy cellular neural networks with parameter uncertainties,” IEEE Trans. Fuzzy Systems, vol. 31, pp. 1769–1779, Jun. 2023. doi: 10.1109/TFUZZ.2022.3214070
|
| [35] |
Z. Yu, Z. Liu, Y. Zhang, Y. Qu, and C. Su, “Distributed finite-time fault-tolerant containment control for multiple unmanned aerial vehicles,” IEEE Trans. Neural Networks and Learning Systems, vol. 31, pp. 2077–2091, Jun. 2020. doi: 10.1109/TNNLS.2019.2927887
|
| [36] |
Z. Yu, Y. Zhang, B. Jiang, and C. Su, Fault-tolerant Cooperative Control of Unmanned Aerial Vehicles. Springer Nature, 2024.
|
| [37] |
F. Lin, G. Xue, B. Qin, S. Li, and H. Liu, “Event-triggered finite-time fuzzy control approach for fractional-order nonlinear chaotic systems with input delay,” Chaos, Solitons and Fractals, vol. 175, p. 114036, Oct. 2023. doi: 10.1016/j.chaos.2023.114036
|
| [38] |
G. Xue, F. Lin, S. Li, and H. Liu, “Adaptive fuzzy finite-time backstepping control of fractional-order nonlinear systems with actuator faults via command-filtering and sliding mode technique,” Information Sciences, vol. 600, pp. 189–208, Jul. 2022. doi: 10.1016/j.ins.2022.03.084
|
| [39] |
S. Song, B. Zhang, J. Xia, and Z. Zhang, “Adaptive backstepping hybrid fuzzy sliding mode control for uncertain fractional-order nonlinear systems based on finite-time scheme,” IEEE Trans. Systems, Man, and Cybernetics: Systems, vol. 50, no. 4, pp. 1559–1569, Apr. 2020. doi: 10.1109/TSMC.2018.2877042
|
| [40] |
Y. X. Li, M. Wei, and S. Tong, “Event-triggered adaptive neural control for fractional-order nonlinear systems based on finite-time scheme,” IEEE Trans. Cybernetics, vol. 52, no. 9, pp. 9481–9489, Sep. 2022. doi: 10.1109/TCYB.2021.3056990
|
| [41] |
X. You, S. Dian, K. Liu, B. Guo, G. Xiang, and Y. Zhu, “Command filter-based adaptive fuzzy finite-time tracking control for uncertain fractional-order nonlinear systems,” IEEE Trans. Fuzzy Systems, vol. 31, no. 1, pp. 226–240, Jan. 2023. doi: 10.1109/TFUZZ.2022.3185453
|
| [42] |
X. Peng, H. Wu, and J. Cao, “Global nonfragile synchronization in finite time for fractional-order discontinuous neural networks with nonlinear growth activations,” IEEE Trans. Neural Networks and Learning Systems, vol. 30, no. 7, pp. 2123–2137, Jul. 2019. doi: 10.1109/TNNLS.2018.2876726
|
| [43] |
Y. Liu, H. Zhang, Z. Shi, and Z. Gao, “Neural-network-based finite-time bipartite containment control for fractional-order multi-agent systems,” IEEE Trans. Neural Networks and Learning Systems, vol. 34, no. 10, pp. 7418–7429, Oct. 2023. doi: 10.1109/TNNLS.2022.3143494
|
| [44] |
Y. Liu, H. Zhang, J. Sun, and Y. Wang, “Event-triggered adaptive finite-time containment control for fractional-order nonlinear multiagent systems,” IEEE Trans. Cybernetics, vol. 54, no. 2, pp. 1250–1260, Feb. 2024. doi: 10.1109/TCYB.2022.3208124
|
| [45] |
X. Yao, Y. Liu, Z. Zhang, and W. Wan, “Synchronization rather than finite-time synchronization results of fractional-order multi-weighted complex networks,” IEEE Trans. Neural Networks and Learning Systems, vol. 33, no. 12, pp. 7052–7063, Dec. 2022. doi: 10.1109/TNNLS.2021.3083886
|
| [46] |
F. Du and J. G. Lu, “Novel methods of finite-time synchronization of fractional-order delayed memristor-based Cohen-Grossberg neural networks,” Nonlinear Dynamics, vol. 111, pp. 18 985–19 001, Oct. 2023. doi: 10.1007/s11071-023-08880-2
|
| [47] |
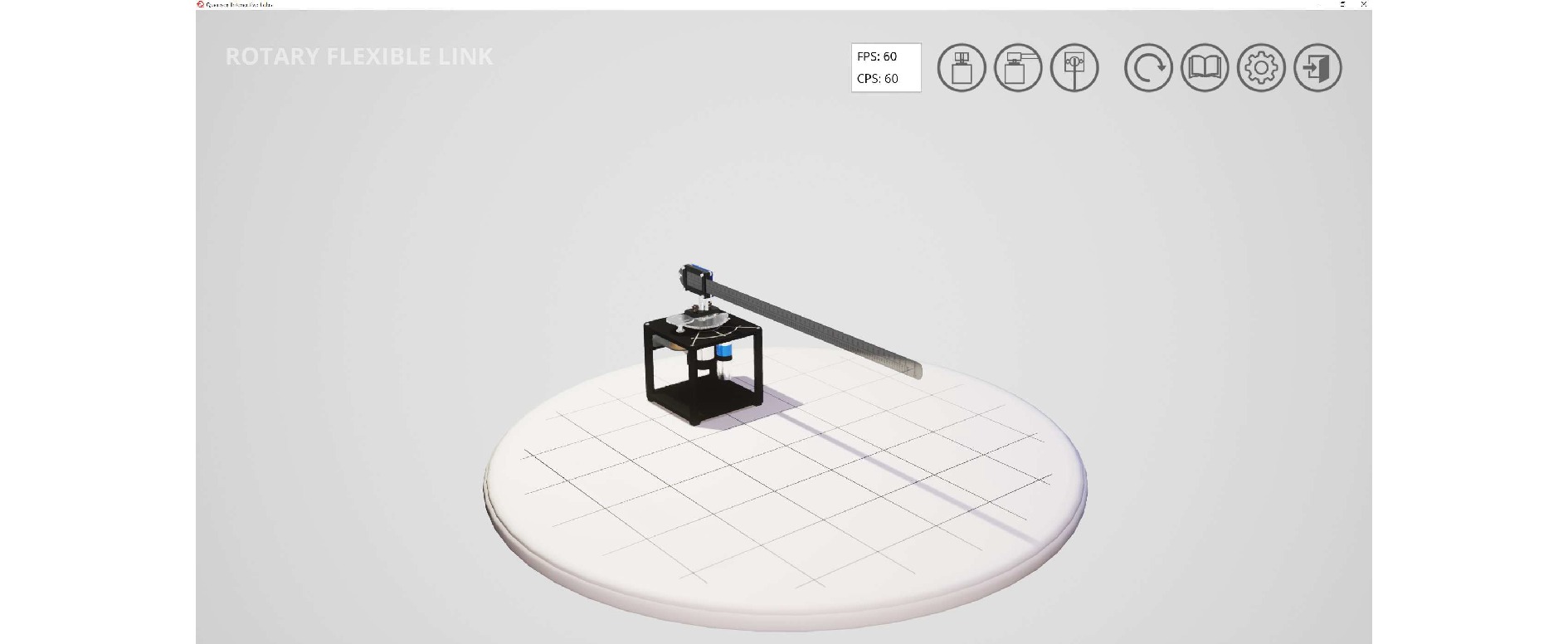
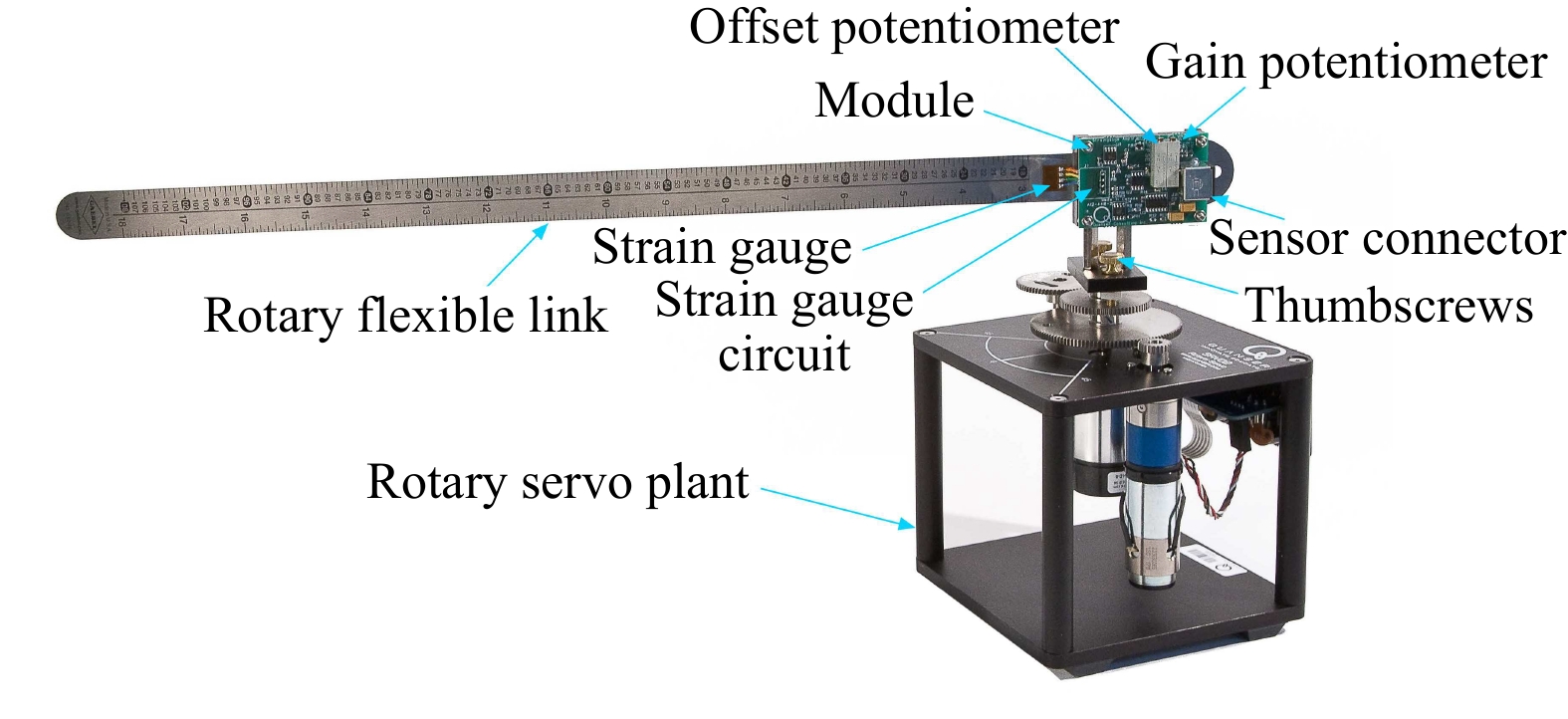
J. Apkarian, P. Karam, and M. Lévis, Rotary Flexible Link—Workbook (Instructor). Markham, Ontario, L3R 5H6, Canada, 2020.
|
| [48] |
X. Yao, H. Sun, Z. Zhao, and Y. Liu, “Event-triggered bipartite consensus tracking and vibration control of flexible Timoshenko manipulators under time-varying actuator faults,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 5, pp. 1190–1201, May 2024. doi: 10.1109/JAS.2024.124266
|
| [49] |
M. Baroudi, M. Saad, and W. Ghie, “State-feedback and linear quadratic regulator applied to a single-link flexible manipulator,” in Proc. IEEE Int. Conf. Robotics and Biomimetics, ROBIO 2009, pp. 1381–1386, Dec. 2009.
|
Figures(18) / Tables(2)






 DownLoad:
DownLoad: