2025, 12(10): 2082-2102.
doi: 10.1109/JAS.2024.125061
Abstract:
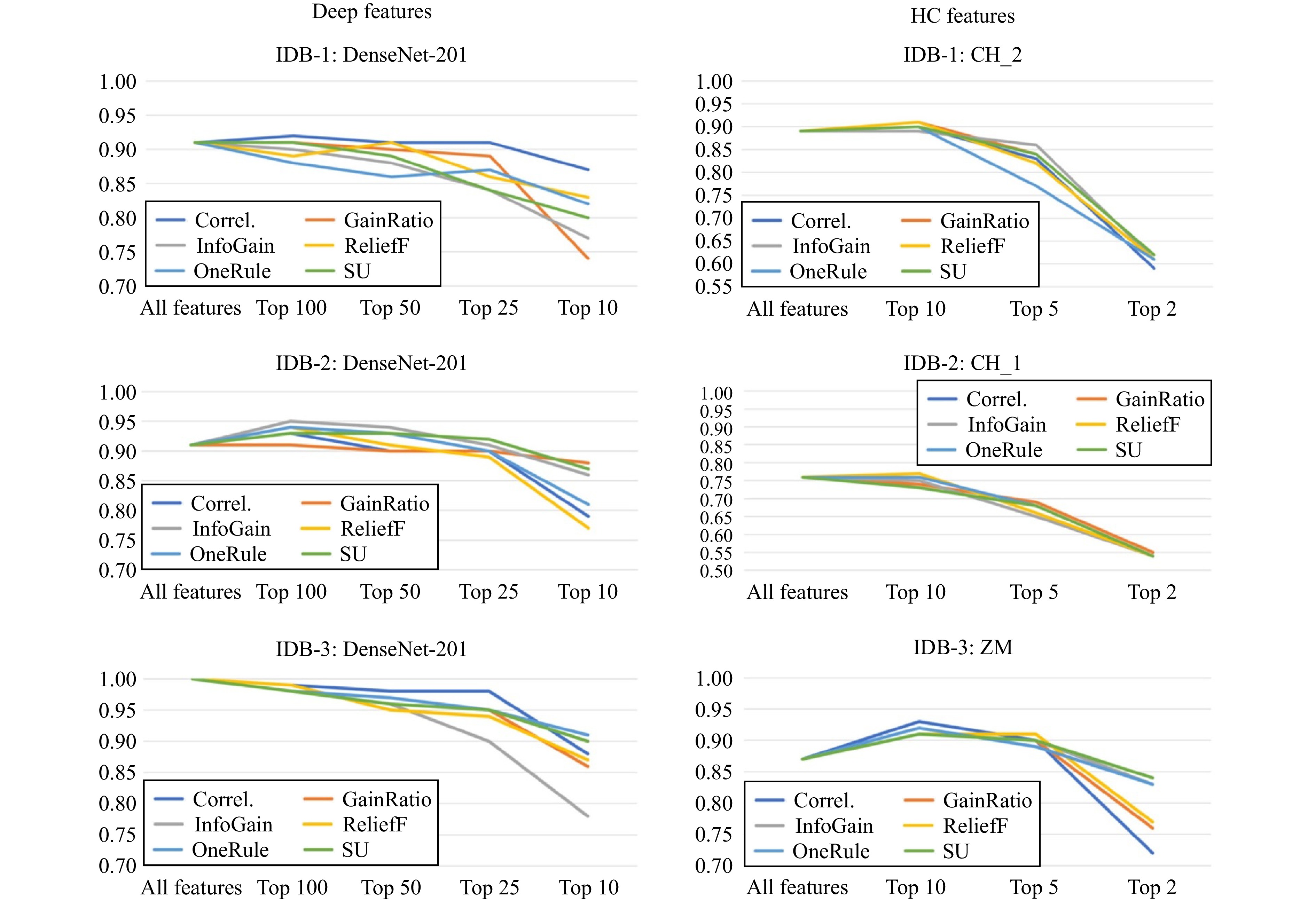
Assessing cheese quality and ripeness is a crucial challenge in the dairy industry, with significant implications for product quality, consumer satisfaction, and economic impact. Traditional evaluation methods relying on visual inspection and human expertise are susceptible to errors and time constraints. This study proposes an innovative approach leveraging machine learning and computer vision techniques for automated cheese ripeness detection to address these limitations.The key contributions of this work include the release of the first comprehensive public dataset of cheese wheel images depicting various products at different ripening stages comprising more than 775 images, CR-IDB, an extensive comparative analysis of the performance of machine learning classifiers trained with features extracted from convolutional neural networks and handcrafted descriptors, along with the evaluation of different feature selection techniques, and finally, a proposal of a novel AI-based framework built upon a Random Forest classifier for cheese ripeness detection, called CRDet.The novelty of CRDet lies in its enforceability across multiple types and dairy industries, which has not been previously addressed in the literature. Unlike earlier methodologies that focused on specific cheese types or relied on subjective visual inspections, this study introduces a comprehensive, noninvasive, and automated approach that demonstrates superior classification performance in differentiating ripeness phases. Thus, it overcomes the limitations of traditional methods and enhances the reliability of cheese ripening assessments.With performance in terms of F1 above 90%, the proposed approach reduces reliance on human expertise, ensuring efficient and reliable evaluation methods for the diverse cheese production landscape. The findings provide valuable insights into the potential of feature selection methods for advancing cheese quality analysis, with implications for the broader dairy industry.
A. Perniciano, L. Zedda, C. Di Ruberto, B. Pes, and A. Loddo, “CRDet: An artificial intelligence-based framework for automated cheese ripeness assessment from digital images,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 10, pp. 2082–2102, Oct. 2025. doi: 10.1109/JAS.2024.125061.



















 E-mail Alert
E-mail Alert