A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
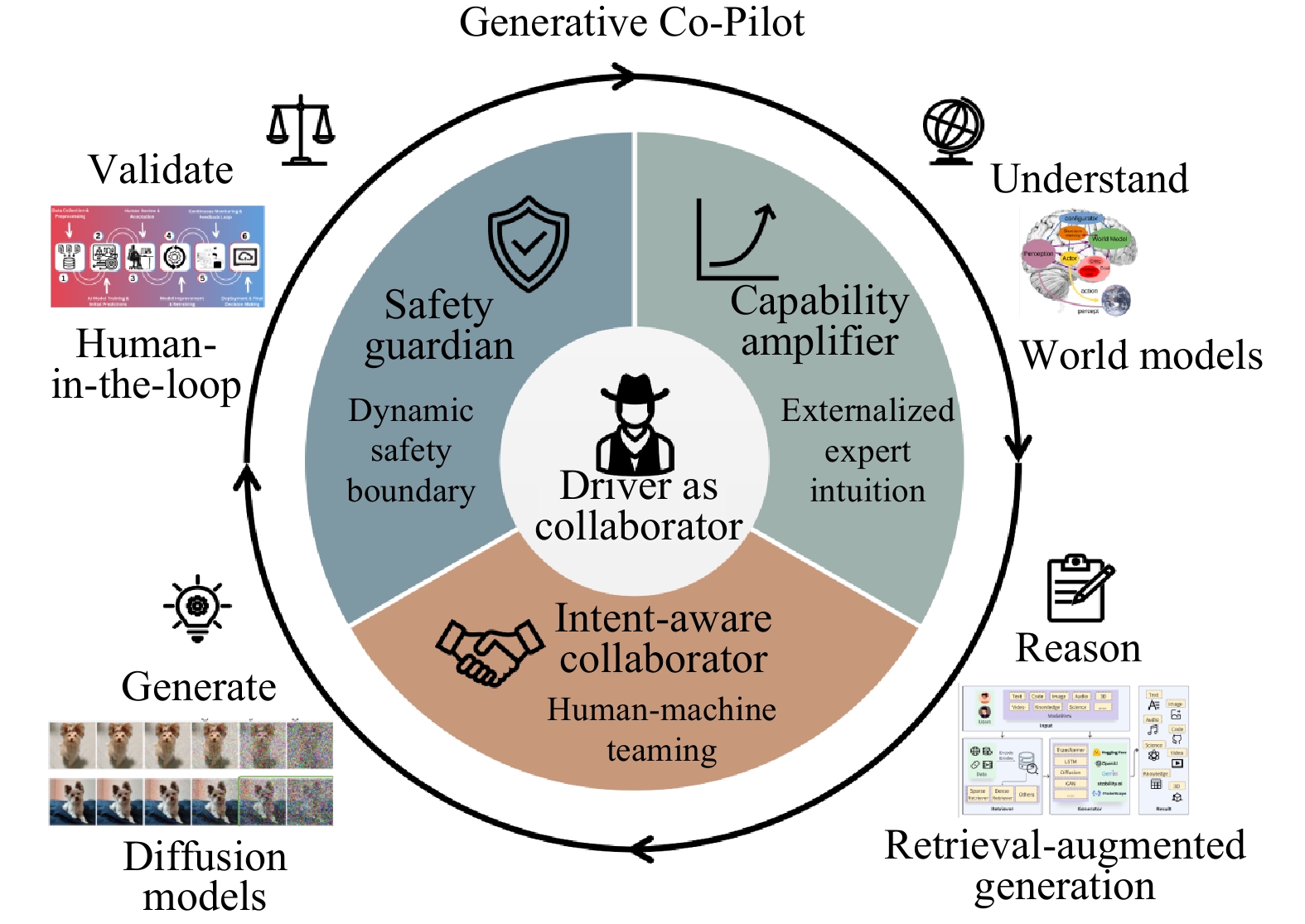
| Citation: | A. Guo, J. Ge, D. Horti, D. Filev, and F.-Y. Wang, “Rethinking off-road ADAS: A perspective on the generative co-pilot paradigm,” IEEE/CAA J. Autom. Sinica, 2025. doi: 10.1109/JAS.2025.125891

|

| [1] |
J. Ge, C. Chang, et al, “Llm-based operating systems for automated vehicles: A new perspective,” IEEE Trans. Intelligent Vehicles, vol. 9, no. 4, pp. 4563–4567, 2024. doi: 10.1109/TIV.2024.3399813
|
| [2] |
D. J. Fagnant and K. Kockelman, “Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations,” Transportation Research Part A: Policy and Practice, vol. 77, pp. 167–181, 2015. doi: 10.1016/j.tra.2015.04.003
|
| [3] |
M. Eder, R. Prinz, F. Schöggl, and G. Steinbauer-Wagner, “Traversability analysis for off-road environments using locomotion experiments and earth observation data,” Robotics and Autonomous Systems, vol. 168, p. 104494, 2023. doi: 10.1016/j.robot.2023.104494
|
| [4] |
S. Beycimen, D. Ignatyev, and A. Zolotas, “A comprehensive survey of unmanned ground vehicle terrain traversability for unstructured environments and sensor technology insights,” Engineering Science and Technology, an Int. Journal, vol. 47, p. 101457, 2023. doi: 10.1016/j.jestch.2023.101457
|
| [5] |
J. Gibson, A. Alavilli, E. Tevere, E. A. Theodorou, and P. Spieler, “Dynamics modeling using visual terrain features for high-speed autonomous off-road driving, ” in 2025 IEEE Int. Conf. on Robotics and Automation (ICRA), 2025, pp. 9809–9815.
|
| [6] |
F.-Y. Wang and G. N. Saridis, “A coordination theory for intelligent machines,” Automatica, vol. 26, no. 5, pp. 833–844, 1990. doi: 10.1016/0005-1098(90)90001-X
|
| [7] |
L. Fan, C. Guo, et al, “Sora for foundation robots with parallel intelligence: Three world models, three robotic systems,” Frontiers of Information Technology & Electronic Engineering, vol. 25, no. 7, pp. 917–923, 2024.
|
| [8] |
Y. Luo, Y. Han, L. Chen, and K. Li, “Downhill safety assistance control for hybrid electric vehicles based on the downhill driver’s intention model,” Proc. the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, vol. 229, no. 13, pp. 1848–1860, 2015. doi: 10.1177/0954407014567908
|
| [9] |
M. Sivaprakasam, S. Triest, C. Ho, S. Aich, J. Lew, I. Adu, W. Wang, and S. Scherer, “Salon: Self-supervised adaptive learning for off-road navigation, ” in 2025 IEEE Int. Conf. on Robotics and Automation (ICRA), 2025, pp. 16 999–17 006.
|
| [10] |
S. Aich, W. Wang, P. Maheshwari, M. Sivaprakasam, S. Triest, C. Ho, J. M. Gregory, J. G. Rogers Ⅲ, and S. Scherer, “Deep bayesian future fusion for self-supervised, high-resolution, off-road mapping, ” arXiv preprint arXiv: 2403.11876, 2024.
|
| [11] |
J. P. Carvalho and A. P. Aguiar, “Deep reinforcement learning for zeroshot coverage path planning with mobile robots,” IEEE/CAA Journal of Automatica Sinica, vol. 12, no. 8, pp. 1594–1609, Aug. 2025. doi: 10.1109/JAS.2024.125064
|
| [12] |
Y. Sun et al., “TOMD: A Trail-based Off-road Multimodal Dataset for Traversable Pathway Segmentation under Challenging Illumination Conditions, ” in Proc. the Int. Joint Conf. on Neural Networks (IJCNN), 2025.
|
| [13] |
A. Datar, A. Pokhrel, M. Nazeri, M. B. Rao, C. Pan, Y. Zhang, A. Harrison, M. Wigness, P. R. Osteen, J. Ye, and X. Xiao, “M2P2: A MultiModal Passive Perception Dataset for Off-Road Mobility in Extreme Low-Light Conditions, ” arXiv preprint arXiv: 2410.01105, 2024.
|
| [14] |
A. Guo, J. Huang et al., “Advances in autonomous vehicle testing: The state of the art and future outlook on driving datasets, simulators and proving grounds, ” Authorea Preprints, 2024.
|
| [15] |
A. Leeman, J. Köhler, S. Bennani, and M. Zeilinger, “Predictive safety filter using system level synthesis, ” in Learning for Dynamics and Control Conf.. PMLR, 2023, pp. 1180–1192.
|
| [16] |
J. Carmigniani, B. Furht, M. Anisetti, P. Ceravolo, E. Damiani, and M. Ivkovic, “Augmented reality technologies, systems and applications,” Multimedia tools and applications, vol. 51, no. 1, pp. 341–377, 2011. doi: 10.1007/s11042-010-0660-6
|
| [17] |
S. Triest, M. G. Castro, P. Maheshwari, M. Sivaprakasam, W. Wang, and S. Scherer, “Learning risk-aware costmaps via inverse reinforcement learning for off-road navigation, ” arXiv preprint arXiv: 2302.00134, 2023.
|
| [18] |
K. Zhang, Z. Tang, X. Hu, X. Pan, X. Guo, Y. Liu, J. Huang, L. Yuan, Q. Zhang, X.-X. Long et al., “Epona: Autoregressive diffusion world model for autonomous driving, ” arXiv preprint arXiv: 2506.24113, 2025.
|
| [19] |
J. Yuan, S. Sun, D. Omeiza, B. Zhao, P. Newman, L. Kunze, and M. Gadd, “Rag-driver: Generalisable driving explanations with retrievalaugmented in-context learning in multi-modal large language model, ” arXiv preprint arXiv: 2402.10828, 2024.
|
| [20] |
T. Han, S. Talia, R. Panicker, P. Shah, N. Jawale, and B. Boots, “Dynamics models in the aggressive off-road driving regime, ” arXiv preprint arXiv: 2405.16487, 2024.
|
| [21] |
K. Iagnemma, S. Kang, H. Shibly, and S. Dubowsky, “Online terrain parameter estimation for wheeled mobile robots with application to planetary rovers,” IEEE transactions on robotics, vol. 20, no. 5, pp. 921–927, 2004. doi: 10.1109/TRO.2004.829462
|
| [22] |
J. Buzhardt and P. Tallapragada, “Terrain parameter estimation from proprioceptive sensing of the suspension dynamics in off-road vehicles,” in 2022 American Control Conf. (ACC). IEEE, 2022, pp. 2437– 2442.
|
| [23] |
Y. Xie, X. Guo, C. Wang, K. Liu, and L. Chen, “Advdiffuser: Generating adversarial safety-critical driving scenarios via guided diffusion, ” in 2024 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 9983–9989.
|
| [24] |
S. Sahu, A. Singh, K. Nambiar, S. Saripalli, and P. Sujit, “Anytraverse: An off-road traversability framework with vlm and human operator in the loop, ” arXiv preprint arXiv: 2506.16826, 2025.
|
| [25] |
OpenAI, “Hello GPT-4o, ” https://openai.com/index/hello-gpt-4o, 2024.
|
| [26] |
M. Sivaprakasam, P. Maheshwari, M. G. Castro, S. Triest, M. Nye, S. Willits, A. Saba, W. Wang, and S. Scherer, “Tartandrive 2.0: More modalities and better infrastructure to further self-supervised learning research in off-road driving tasks, ” in 2024 IEEE Int. Conf. on Robotics and Automation (ICRA). IEEE, 2024, pp. 12 606–12 606.
|
| [27] |
M. Gupta and X. Xiao, “T-cbf: Traversability-based control barrier function to navigate vertically challenging terrain, ” arXiv preprint arXiv: 2503.06083, 2025.
|
| [28] |
J. Jabbour and V. Janapa Reddi, “Generative ai agents in autonomous machines: A safety perspective, ” in Proc. the 43rd IEEE/ACM Int. Conf. on Computer-Aided Design, 2024, pp. 1–13.
|
| [29] |
G. Liu, K. Huang, X. Lv, Y. Sun, H. Li, X. Lei, Q. Yuan, and L. Shu, “Innovations and refinements in LiDAR odometry and mapping: A comprehensive review,” IEEE/CAA Journal of Automatica Sinica, vol. 12, no. 6, pp. 1072–1094, Jun. 2025. doi: 10.1109/JAS.2025.125198
|
| [30] |
X. X. Wang, J. Yang, P. De Reffye et al., “Parallel intelligence in three decades: a historical review and future perspective on ACP and cyberphysical-social systems,” Artificial Intelligence Review, vol. 57, no. 9, 2024.
|
| [31] |
A. Kuznietsov, B. Gyevnar, C. Wang, S. Peters, and S. V. Albrecht, “Explainable ai for safe and trustworthy autonomous driving: A systematic review,” IEEE Trans. Intelligent Transportation Systems, vol. 25, no. 12, pp. 19342–19364, 2024. doi: 10.1109/TITS.2024.3474469
|
| [32] |
E. Bitsikas and A. Ranganathan, “Security analysis of 5g nr deviceto-device sidelink communications, ” arXiv preprint arXiv: 2502.16650, 2025.
|
| [33] |
G. Hoffman, T. Bhattacharjee, and S. Nikolaidis, “Inferring human intent and predicting human action in human–robot collaboration,” Annual Review of Control, Robotics, and Autonomous Systems, vol. 7, 2024.
|
| [34] |
B. Zhou, B. Zarrouki, M. Piccinini, C. Hu, L. Xie, and J. Betz, “Safe reinforcement learning with a predictive safety filter for motion planning and control: A drifting vehicle example, ” arXiv preprint arXiv: 2506.22894, 2025.
|
Figures(2) / Tables(1)






 DownLoad:
DownLoad:
