2022, 9(12): 2071-2078.
doi: 10.1109/JAS.2022.106091
Abstract:
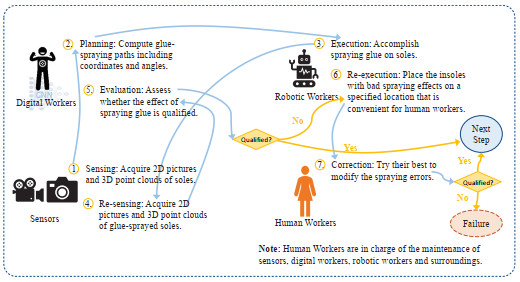
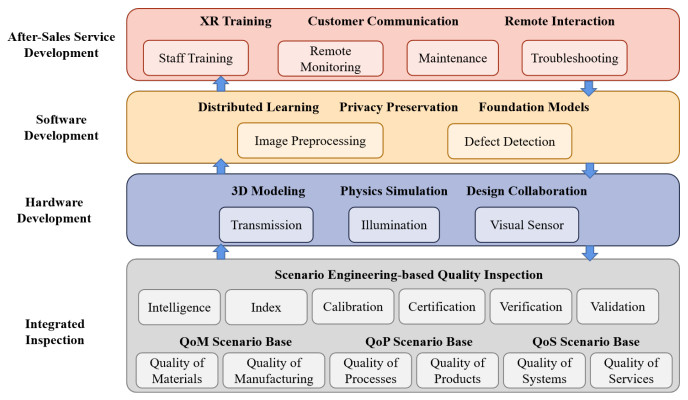
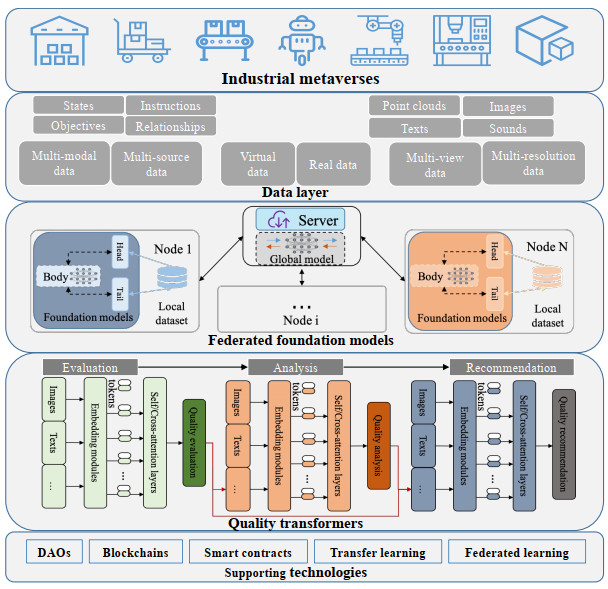
With the rapid development of information technologies such as digital twin, extended reality, and blockchain, the hype around "metaverse" is increasing at astronomical speed. However, much attention has been paid to its entertainment and social functions. Considering the openness and interoperability of metaverses, the market of quality inspection promises explosive growth. In this paper, taking advantage of metaverses, we first propose the concept of Automated Quality Inspection (AutoQI), which performs integrated inspection covering the entire manufacturing process, including Quality of Materials, Quality of Manufacturing (QoM), Quality of Products, Quality of Processes (QoP), Quality of Systems, and Quality of Services (QoS). Based on the scenarios engineering theory, we discuss how to perform interactions between metaverses and the physical world for virtual design instruction and physical validation feedback. Then we introduce a bottom-up inspection device development workflow with productivity tools offered by metaverses, making development more effective and efficient than ever. As the core of quality inspection, we propose Quality Transformers to complete detection task, while federated learning is integrated to regulate data sharing. In summary, we point out the development directions of quality inspection under metaverse tide.
Y. T. Wang, Y. L. Tian, J. G. Wang, Y. S. Cao, S. X. Li, and B. Tian, "Integrated Inspection of QoM, QoP, and QoS for AOI Industries in Metaverses, " IEEE/CAA J. Autom. Sinica, vol. 9, no. 12, pp.2071-2078, Dec. 2022. doi: 10.1109/JAS.2022.106091.















 E-mail Alert
E-mail Alert