2023, 10(1): 25-41.
doi: 10.1109/JAS.2022.105860
Abstract:
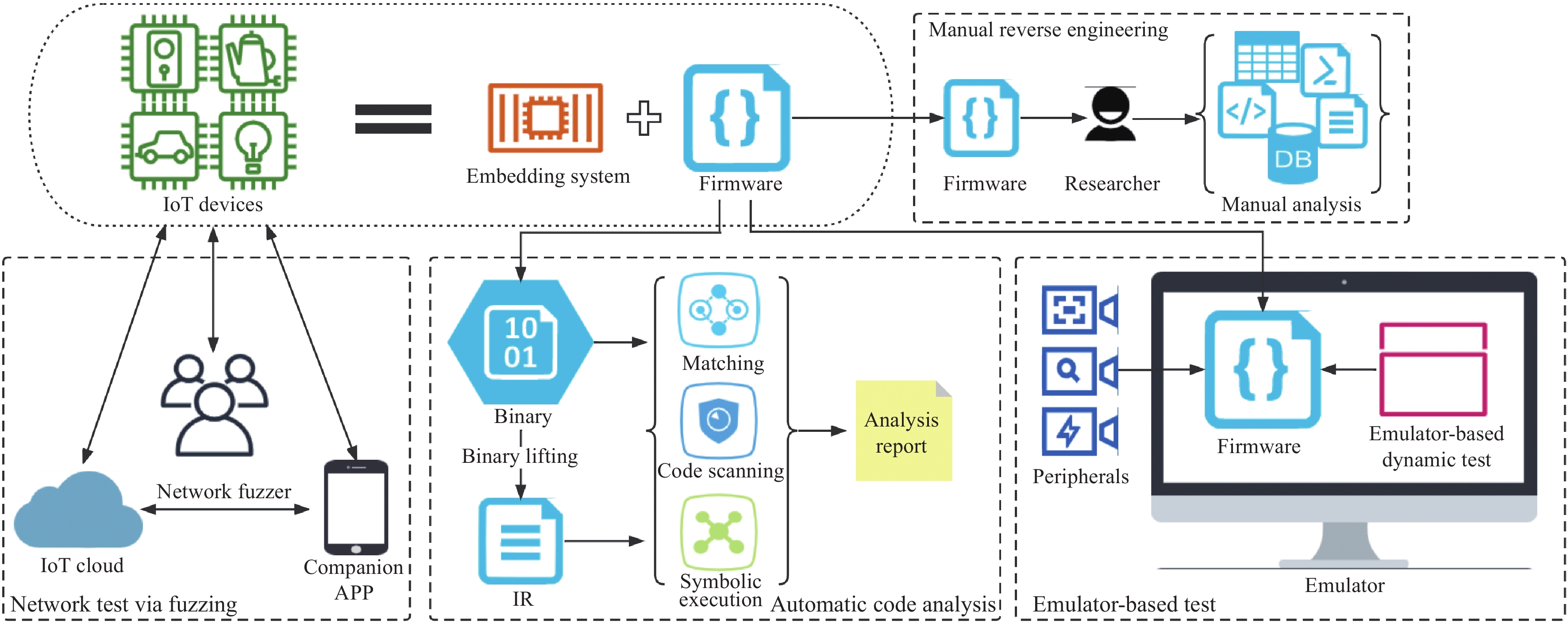
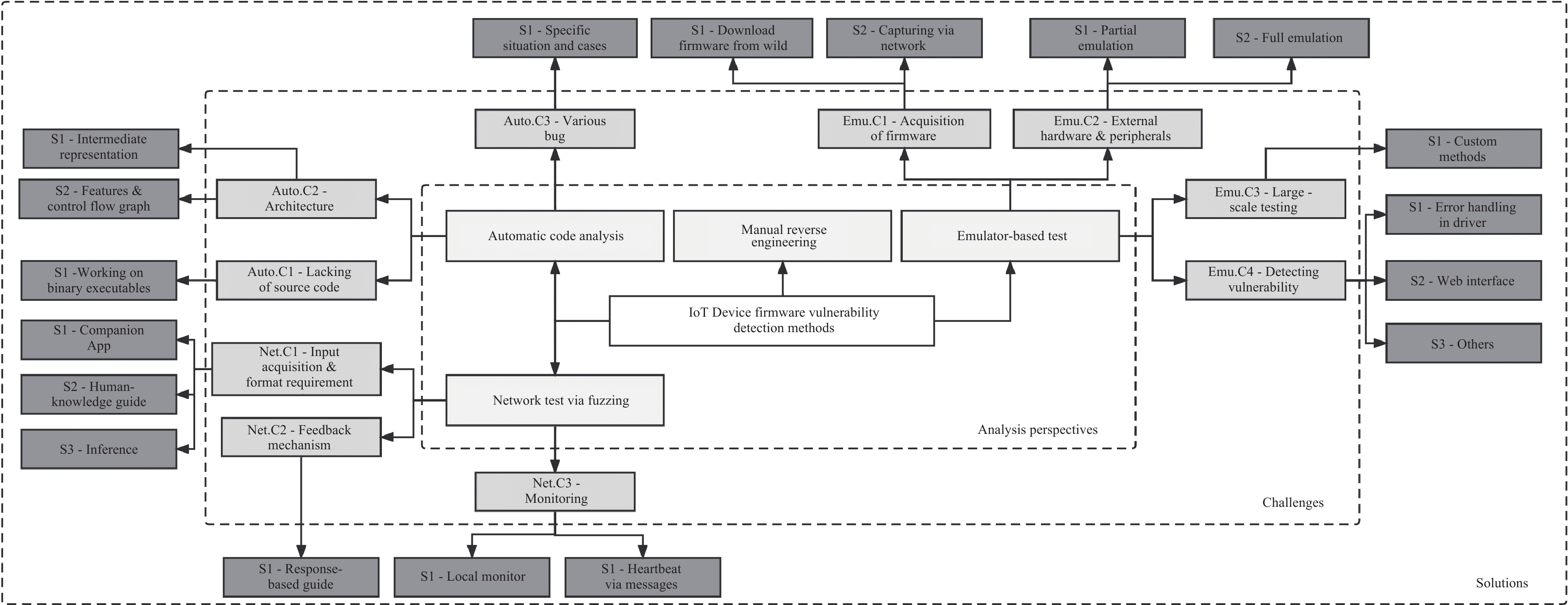
Internet of things (IoT) devices make up 30% of all network-connected endpoints, introducing vulnerabilities and novel attacks that make many companies as primary targets for cybercriminals. To address this increasing threat surface, every organization deploying IoT devices needs to consider security risks to ensure those devices are secure and trusted. Among all the solutions for security risks, firmware security analysis is essential to fix software bugs, patch vulnerabilities, or add new security features to protect users of those vulnerable devices. However, firmware security analysis has never been an easy job due to the diversity of the execution environment and the close source of firmware. These two distinct features complicate the operations to unpack firmware samples for detailed analysis. They also make it difficult to create visual environments to emulate the running of device firmware. Although researchers have developed many novel methods to overcome various challenges in the past decade, critical barriers impede firmware security analysis in practice. Therefore, this survey is motivated to systematically review and analyze the research challenges and their solutions, considering both breadth and depth. Specifically, based on the analysis perspectives, various methods that perform security analysis on IoT devices are introduced and classified into four categories. The challenges in each category are discussed in detail, and potential solutions are proposed subsequently. We then discuss the flaws of these solutions and provide future directions for this research field. This survey can be utilized by a broad range of readers, including software developers, cyber security researchers, and software security engineers, to better understand firmware security analysis.
X. T. Feng, X. G. Zhu, Q.-L. Han, W. Zhou, S. Wen, and Y. Xiang, “Detecting vulnerability on IoT device firmware: A survey,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 1, pp. 25–41, Jan. 2023. doi: 10.1109/JAS.2022.105860.


















 E-mail Alert
E-mail Alert