A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 1
Volume 10
Issue 1
IEEE/CAA Journal of Automatica Sinica
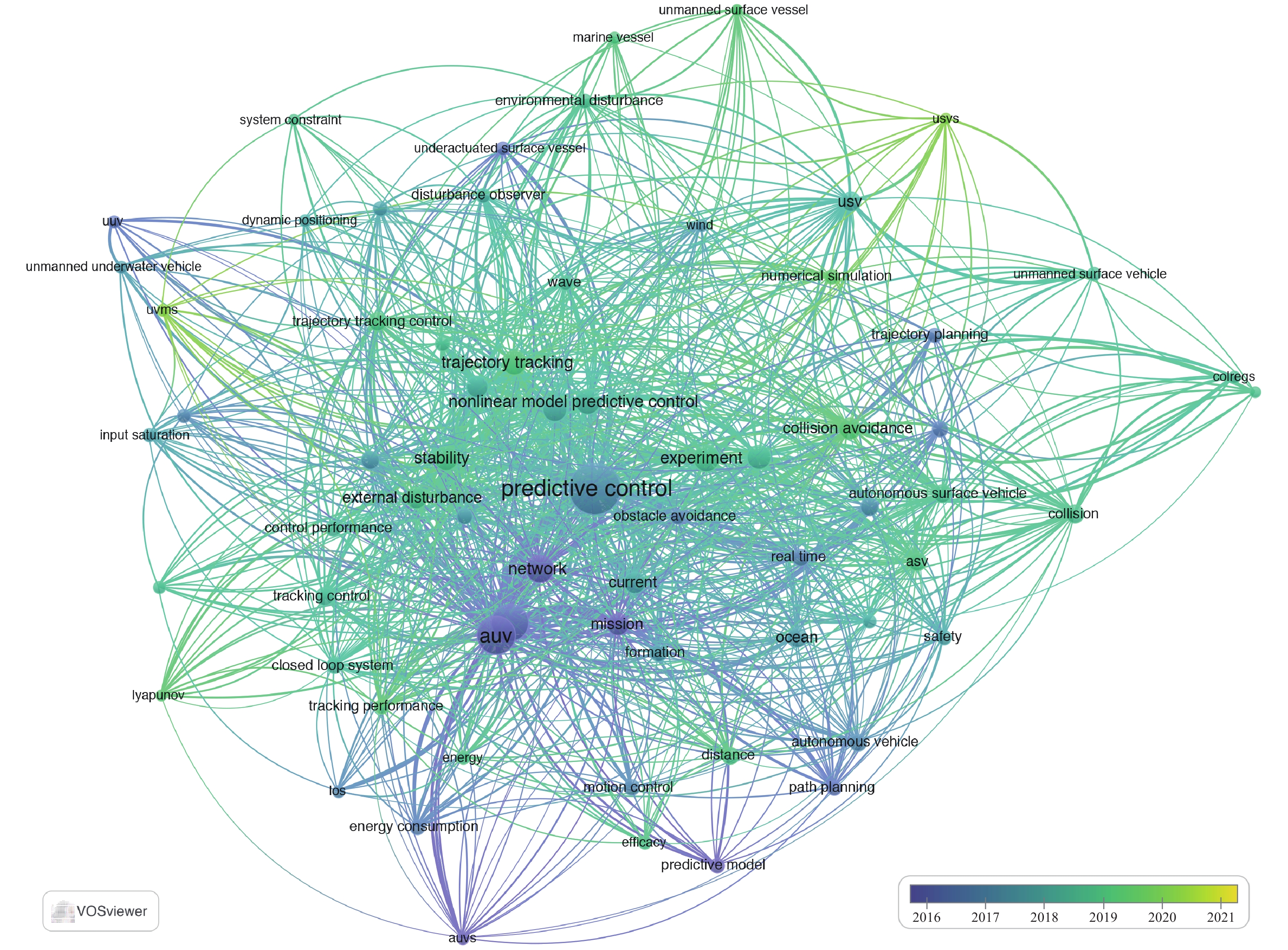
| Citation: | H. L. Wei and Y. Shi, “MPC-based motion planning and control enables smarter and safer autonomous marine vehicles: Perspectives and a tutorial survey,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 1, pp. 8–24, Jan. 2023. doi: 10.1109/JAS.2022.106016

|

| [1] |
E. Zereik, M. Bibuli, N. Mišković, P. Ridao, and A. Pascoal, “Challenges and future trends in marine robotics,” Annual Reviews in Control, vol. 46, pp. 350–368, 2018. doi: 10.1016/j.arcontrol.2018.10.002
|
| [2] |
Y. Shi, C. Shen, H. Fang, and H. Li, “Advanced control in marine mechatronic systems: A survey,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 3, pp. 1121–1131, 2017. doi: 10.1109/TMECH.2017.2660528
|
| [3] |
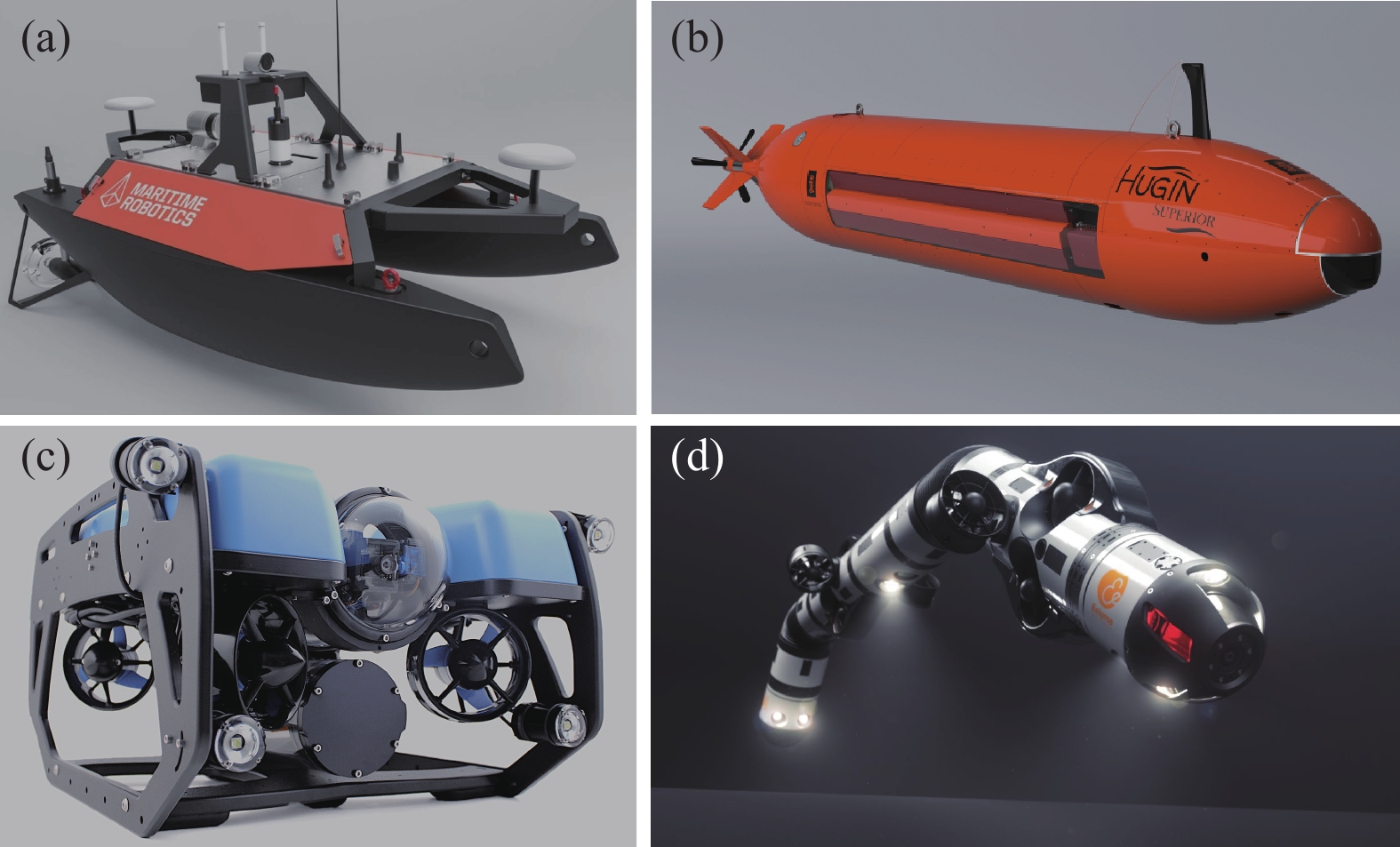
M. Robotics, “The Otter unmanned surface vehicle,” https://www.maritimerobotics.com/otter, 2022, accessed: 2022-05-06.
|
| [4] |
K. Maritime, “The Hugin AUV,” https://www.kongsberg.com/maritime/products/marine-robotics/autonomous-underwater-vehicles/AUV-hugin/, 2022, accessed: 2022-05-06.
|
| [5] |
B. Robotics, “The BlueROV2,” https://bluerobotics.com/store/rov/bluerov2/, 2022, accessed: 2022-05-06.
|
| [6] |
I.-L. G. Borlaug, K. Y. Pettersen, and J. T. Gravdahl, “Tracking control of an articulated intervention autonomous underwater vehicle in 6DOF using generalized super-twisting: Theory and experiments,” IEEE Trans. Control Systems Technology, vol. 29, no. 1, pp. 353–369, 2020.
|
| [7] |
T. I. Fossen, Handbook of Marine Craft Hydrodynamics and Motion Control. John Wiley & Sons, 2011.
|
| [8] |
Z. Liu, Y. Zhang, X. Yu, and C. Yuan, “Unmanned surface vehicles: An overview of developments and challenges,” Annual Reviews in Control, vol. 41, pp. 71–93, 2016. doi: 10.1016/j.arcontrol.2016.04.018
|
| [9] |
J. B. Rawlings, D. Q. Mayne, and M. Diehl, Model Predictive Control: Theory, Computation, and Design. Madison: Nob Hill Publishing, 2017.
|
| [10] |
Y. Shi and K. Zhang, “Advanced model predictive control framework for autonomous intelligent mechatronic systems: A tutorial overview and perspectives,” Annual Reviews in Control, vol. 52, pp. 170–196, 2021. doi: 10.1016/j.arcontrol.2021.10.008
|
| [11] |
P. Bouffard, A. Aswani, and C. Tomlin, “Learning-based model predictive control on a quadrotor: Onboard implementation and experimental results,” in Proc. IEEE Int. Conf. Robotics and Automation, 2012, pp. 279–284.
|
| [12] |
W. B. Dunbar and D. S. Caveney, “Distributed receding horizon control of vehicle platoons: Stability and string stability,” IEEE Trans. Automatic Control, vol. 57, no. 3, pp. 620–633, 2011.
|
| [13] |
G. Roberts, “Trends in marine control systems,” Annual Reviews in Control, vol. 32, no. 2, pp. 263–269, 2008. doi: 10.1016/j.arcontrol.2008.08.002
|
| [14] |
J. E. Manley, “Unmanned surface vehicles, 15 years of development,” in Proc. IEEE OCEANS, 2008, pp. 1–4.
|
| [15] |
A. J. Sørensen, “A survey of dynamic positioning control systems,” Annual Reviews in Control, vol. 35, no. 1, pp. 123–136, 2011. doi: 10.1016/j.arcontrol.2011.03.008
|
| [16] |
S. Campbell, W. Naeem, and G. W. Irwin, “A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres,” Annual Reviews in Control, vol. 36, no. 2, pp. 267–283, 2012. doi: 10.1016/j.arcontrol.2012.09.008
|
| [17] |
J. Melo and A. Matos, “Survey on advances on terrain based navigation for autonomous underwater vehicles,” Ocean Engineering, vol. 139, pp. 250–264, 2017. doi: 10.1016/j.oceaneng.2017.04.047
|
| [18] |
A. Sahoo, S. K. Dwivedy, and P. Robi, “Advancements in the field of autonomous underwater vehicle,” Ocean Engineering, vol. 181, pp. 145–160, 2019. doi: 10.1016/j.oceaneng.2019.04.011
|
| [19] |
Y. Huang, L. Chen, P. Chen, R. R. Negenborn, and P. Van Gelder, “Ship collision avoidance methods: State-of-the-art,” Safety Science, vol. 121, pp. 451–473, 2020. doi: 10.1016/j.ssci.2019.09.018
|
| [20] |
C. Zhou, S. Gu, Y. Wen, Z. Du, C. Xiao, L. Huang, and M. Zhu, “The review unmanned surface vehicle path planning: Based on multi-modality constraint,” Ocean Engineering, vol. 200, p. 107043, 2020.
|
| [21] |
L. Chen, R. Negenborn, Y. Huang, and H. Hopman, “A survey on cooperative control for waterborne transport,” IEEE Intelligent Transportation Systems Magazine, vol. 13, no. 2, pp. 71–90, 2020.
|
| [22] |
X. Zhang, C. Wang, L. Jiang, L. An, and R. Yang, “Collision-avoidance navigation systems for maritime autonomous surface ships: A state of the art survey,” Ocean Engineering, vol. 235, p. 109380, 2021. doi: 10.1016/j.oceaneng.2021.109380
|
| [23] |
N. Gu, D. Wang, Z. Peng, J. Wang, and Q.-L. Han, “Advances in line-of-sight guidance for path following of autonomous marine vehicles: An overview,” IEEE Trans. Systems,Man,and Cybernetics: Systems, 2022. DOI: 10.1109/TSMC.2022.3162862
|
| [24] |
N. Gu, D. Wang, Z. Peng, J. Wang, and Q.-L. Han, “Disturbance observers and extended state observers for marine vehicles: A survey,” Control Engineering Practice, vol. 123, p. 105158, 2022. doi: 10.1016/j.conengprac.2022.105158
|
| [25] |
Z. Zhou, J. Liu, and J. Yu, “A survey of underwater multi-robot systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 1–18, 2022. doi: 10.1109/JAS.2021.1004269
|
| [26] |
Ü. Öztürk, M. Akdağ, and T. Ayabakan, “A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective,” Ocean Engineering, vol. 251, p. 111010, 2022. doi: 10.1016/j.oceaneng.2022.111010
|
| [27] |
T. I. Fossen, Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles. Marine Cybernetics, 2002.
|
| [28] |
K. D. Do, Z.-P. Jiang, and J. Pan, “Underactuated ship global tracking under relaxed conditions,” IEEE Trans. Automatic Control, vol. 47, no. 9, pp. 1529–1536, 2002. doi: 10.1109/TAC.2002.802755
|
| [29] |
Z. Zeng, K. Sammut, L. Lian, F. He, A. Lammas, and Y. Tang, “A comparison of optimization techniques for AUV path planning in environments with ocean currents,” Robotics and Autonomous Systems, vol. 82, pp. 61–72, 2016. doi: 10.1016/j.robot.2016.03.011
|
| [30] |
C. V. Caldwell, D. D. Dunlap, and E. G. Collins, “Motion planning for an autonomous underwater vehicle via sampling based model predictive control,” in Proc. OCEANS MTS/IEEE SEATTLE, 2010, pp. 1–6.
|
| [31] |
V. T. Huynh, M. Dunbabin, and R. N. Smith, “Predictive motion planning for AUVs subject to strong time-varying currents and forecasting uncertainties,” in Proc. IEEE Int. Conf. Robotics and Automation, 2015, pp. 1144–1151.
|
| [32] |
X. Zhao, J. Gao, and W. Yan, “A receding horizon motion planner for underwater vehicle manipulator systems,” in Proc. OCEANS MTS/IEEE Charleston, 2018, pp. 1–7.
|
| [33] |
C. Shen, Y. Shi, and B. Buckham, “Integrated path planning and tracking control of an AUV: A unified receding horizon optimization approach,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 3, pp. 1163–1173, 2017. doi: 10.1109/TMECH.2016.2612689
|
| [34] |
M. Lutz and T. Meurer, “Optimal trajectory planning and model predictive control of underactuated marine surface vessels using a flatness-based approach,” in Proc. IEEE American Control Conf., 2021, pp. 4667–4673.
|
| [35] |
A. Bemporad, A. Oliveri, T. Poggi, and M. Storace, “Ultra-fast stabilizing model predictive control via canonical piecewise affine approximations,” IEEE Trans. Automatic Control, vol. 56, no. 12, pp. 2883–2897, 2011. doi: 10.1109/TAC.2011.2141410
|
| [36] |
H. Li and Y. Shi, “Event-triggered robust model predictive control of continuous-time nonlinear systems,” Automatica, vol. 50, no. 5, pp. 1507–1513, 2014. doi: 10.1016/j.automatica.2014.03.015
|
| [37] |
C. Liu, H. Li, and Y. Shi, “A unitary distributed subgradient method for multi-agent optimization with different coupling sources,” Automatica, vol. 114, p. 108834, 2020. doi: 10.1016/j.automatica.2020.108834
|
| [38] |
M. Akdağ, P. Solnør, and T. A. Johansen, “Collaborative collision avoidance for maritime autonomous surface ships: A review,” Ocean Engineering, vol. 250, p. 110920, 2022. doi: 10.1016/j.oceaneng.2022.110920
|
| [39] |
T. A. Johansen, T. Perez, and A. Cristofaro, “Ship collision avoidance and COLREGS compliance using simulation-based control behavior selection with predictive hazard assessment,” IEEE Trans. Intelligent Transportation Systems, vol. 17, no. 12, pp. 3407–3422, 2016. doi: 10.1109/TITS.2016.2551780
|
| [40] |
B.-O. H. Eriksen, M. Breivik, E. F. Wilthil, A. L. Flåten, and E. F. Brekke, “The branching-course model predictive control algorithm for maritime collision avoidance,” Journal of Field Robotics, vol. 36, no. 7, pp. 1222–1249, 2019. doi: 10.1002/rob.21900
|
| [41] |
D. K. M. Kufoalor, T. A. Johansen, E. F. Brekke, A. Hepsø, and K. Trnka, “Autonomous maritime collision avoidance: Field verification of autonomous surface vehicle behavior in challenging scenarios,” Journal of Field Robotics, vol. 37, no. 3, pp. 387–403, 2020. doi: 10.1002/rob.21919
|
| [42] |
J. de Vries, E. Trevisan, J. van der Toorn, T. Das, B. Brito, and J. Alonso-Mora, “Regulations aware motion planning for autonomous surface vessels in urban canals,” in Proc. Int. Conf. Robotics and Automation, 2022, pp. 3291–3297.
|
| [43] |
S. Siriya, M. Bui, A. Shriraman, M. Chen, and Y. Pu, “Safety-guaranteed real-time trajectory planning for underwater vehicles in plane-progressive waves,” in Proc. 59th IEEE Conf. Decision and Control, 2020, pp. 5249–5254.
|
| [44] |
S. Heshmati-Alamdari, A. Nikou, and D. Dimarogonas, “Robust trajectory tracking control for underactuated autonomous underwater vehicles in uncertain environments,” IEEE Trans. Automation Science and Engineering, vol. 18, no. 3, pp. 1288–1301, 2021. doi: 10.1109/TASE.2020.3001183
|
| [45] |
X. Sun, G. Wang, and Y. Fan, “Collision avoidance guidance and control scheme for vector propulsion unmanned surface vehicle with disturbance,” Applied Ocean Research, vol. 115, p. 102799, 2021.
|
| [46] |
L. Ferranti, R. R. Negenborn, T. Keviczky, and J. Alonso-Mora, “Coordination of multiple vessels via distributed nonlinear model predictive control,” in Proc. IEEE European Control Conf., 2018, pp. 2523–2528.
|
| [47] |
S. Xie, V. Garofano, X. Chu, and R. R. Negenborn, “Model predictive ship collision avoidance based on Q-learning beetle swarm antenna search and neural networks,” Ocean Engineering, vol. 193, p. 106609, 2019.
|
| [48] |
I. Prodan, E. I. Grøtli, L. Lefèvre, et al., “Safe navigation in a coastal environment of multiple surface vehicles under uncertainties: A combined use of potential field constructions and NMPC,” Ocean Engineering, vol. 216, p. 107706, 2020. doi: 10.1016/j.oceaneng.2020.107706
|
| [49] |
S. Zhang, Y. Yang, S. Siriya, and Y. Pu, “Trajectory planning for multiple autonomous underwater vehicles with safety guarantees,” arXiv preprint arXiv: 2011.13505, 2020.
|
| [50] |
S. Blindheim, S. Gros, and T. A. Johansen, “Risk-based model predictive control for autonomous ship emergency management,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 14524–14531, 2020. doi: 10.1016/j.ifacol.2020.12.1456
|
| [51] |
A. Wahl and E.-D. Gilles, “Track-keeping on waterways using model predictive control,” IFAC Proceedings Volumes, vol. 31, no. 30, pp. 149–154, 1998. doi: 10.1016/S1474-6670(17)38432-X
|
| [52] |
T. Perez, C.-Y. Tzeng, and G. C. Goodwin, “Model predictive rudder roll stabilization control for ships,” IFAC Proceedings Volumes, vol. 33, no. 21, pp. 45–50, 2000. doi: 10.1016/S1474-6670(17)37049-0
|
| [53] |
Z. Li and J. Sun, “Disturbance compensating model predictive control with application to ship heading control,” IEEE Trans. Control Systems Technology, vol. 20, no. 1, pp. 257–265, 2011.
|
| [54] |
A. Veksler, T. A. Johansen, F. Borrelli, and B. Realfsen, “Dynamic positioning with model predictive control,” IEEE Trans. Control Systems Technology, vol. 24, no. 4, pp. 1340–1353, 2016. doi: 10.1109/TCST.2015.2497280
|
| [55] |
D. C. Fernández and G. A. Hollinger, “Model predictive control for underwater robots in ocean waves,” IEEE Robotics and Automation Letters, vol. 2, no. 1, pp. 88–95, 2016.
|
| [56] |
K. L. Walker, R. Gabl, S. Aracri, Y. Cao, A. A. Stokes, A. Kiprakis, and F. Giorgio-Serchi, “Experimental validation of wave induced disturbances for predictive station keeping of a remotely operated vehicle,” IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 5421–5428, 2021. doi: 10.1109/LRA.2021.3075662
|
| [57] |
C. Shen, Y. Shi, and B. Buckham, “Lyapunov-based model predictive control for dynamic positioning of autonomous underwater vehicles,” in Proc. IEEE Int. Conf. Unmanned Systems, 2017, pp. 588–593.
|
| [58] |
H. Li and W. Yan, “Model predictive stabilization of constrained underactuated autonomous underwater vehicles with guaranteed feasibility and stability,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 3, pp. 1185–1194, 2017. doi: 10.1109/TMECH.2016.2587288
|
| [59] |
K. Y. Pettersen and O. Egeland, “Time-varying exponential stabilization of the position and attitude of an underactuated autonomous underwater vehicle,” IEEE Trans. Automatic Control, vol. 44, no. 1, pp. 112–115, 1999. doi: 10.1109/9.739086
|
| [60] |
A. A. do Nascimento, H. R. Feyzmahdavian, M. Johansson, W. Garcia-Gabin, and K. Tervo, “Tube-based model predictive control for dynamic positioning of marine vessels,” IFAC-PapersOnLine, vol. 52, no. 21, pp. 33–38, 2019. doi: 10.1016/j.ifacol.2019.12.279
|
| [61] |
H. Zheng, J. Wu, W. Wu, and Y. Zhang, “Robust dynamic positioning of autonomous surface vessels with tube-based model predictive control,” Ocean Engineering, vol. 199, p. 106820, 2020.
|
| [62] |
H. Yang, F. Deng, Y. He, D. Jiao, and Z. Han, “Robust nonlinear model predictive control for reference tracking of dynamic positioning ships based on nonlinear disturbance observer,” Ocean Engineering, vol. 215, p. 107885, 2020.
|
| [63] |
Z. Li, J. Sun, and S. Oh, “Path following for marine surface vessels with rudder and roll constraints: An MPC approach,” in Proc. IEEE American Control Conf., 2009, pp. 3611–3616.
|
| [64] |
R. Ghaemi, S. Oh, and J. Sun, “Path following of a model ship using model predictive control with experimental verification,” in Proc. IEEE American Control Conf., 2010, pp. 5236–5241.
|
| [65] |
S.-R. Oh and J. Sun, “Path following of underactuated marine surface vessels using line-of-sight based model predictive control,” Ocean Engineering, vol. 37, no. 2–3, pp. 289–295, 2010. doi: 10.1016/j.oceaneng.2009.10.004
|
| [66] |
T. Faulwasser and R. Findeisen, “Constrained output path-following for nonlinear systems using predictive control,” IFAC Proceedings Volumes, vol. 43, no. 14, pp. 753–758, 2010. doi: 10.3182/20100901-3-IT-2016.00122
|
| [67] |
T. Faulwasser and R. Findeisen, “Nonlinear model predictive control for constrained output path following,” IEEE Trans. Automatic Control, vol. 61, no. 4, pp. 1026–1039, 2016. doi: 10.1109/TAC.2015.2466911
|
| [68] |
N. Kapetanović, M. Bibuli, N. Mišković, and M. Caccia, “Real-time model predictive line following control for underactuated marine vehicles,” IFAC-PapersOnLine, vol. 50, no. 1, pp. 12374–12379, 2017. doi: 10.1016/j.ifacol.2017.08.2501
|
| [69] |
C. Shen, Y. Shi, and B. Buckham, “Path-following control of an AUV: A multiobjective model predictive control approach,” IEEE Trans. Control Systems Technology, vol. 27, no. 3, pp. 1334–1342, 2018.
|
| [70] |
J. Zhang, T. Sun, and Z. Liu, “Robust model predictive control for path-following of underactuated surface vessels with roll constraints,” Ocean Engineering, vol. 143, pp. 125–132, 2017. doi: 10.1016/j.oceaneng.2017.07.057
|
| [71] |
C. Liu, D. Wang, Y. Zhang, and X. Meng, “Model predictive control for path following and roll stabilization of marine vessels based on neurodynamic optimization,” Ocean Engineering, vol. 217, p. 107524, 2020.
|
| [72] |
S. Helling and T. Meurer, “A culling procedure for collision avoidance model predictive control with application to ship autopilot models,” IFAC-PapersOnLine, vol. 54, no. 16, pp. 43–50, 2021. doi: 10.1016/j.ifacol.2021.10.071
|
| [73] |
S. Helling, C. Roduner, and T. Meurer, “On the dual implementation of collision-avoidance constraints in path-following MPC for underactuated surface vessels,” in Proc. IEEE American Control Conf., 2021, pp. 3366–3371.
|
| [74] |
C. Liu, H. Zheng, R. Negenborn, X. Chu, and S. Xie, “Adaptive predictive path following control based on least squares support vector machines for underactuated autonomous vessels,” Asian Journal of Control, vol. 23, no. 1, pp. 432–448, 2021. doi: 10.1002/asjc.2208
|
| [75] |
A. Pavlov, H. Nordahl, and M. Breivik, “MPC-based optimal path following for underactuated vessels,” IFAC Proceedings Volumes, vol. 42, no. 18, pp. 340–345, 2009. doi: 10.3182/20090916-3-BR-3001.0065
|
| [76] |
Z. Yan and J. Wang, “Model predictive control for tracking of underactuated vessels based on recurrent neural networks,” IEEE Journal of Oceanic Engineering, vol. 37, no. 4, pp. 717–726, 2012. doi: 10.1109/JOE.2012.2201797
|
| [77] |
J. Wang, J. Wang, and Q.-L. Han, “Neurodynamics-based model predictive control of continuous-time under-actuated mechatronic systems,” IEEE/ASME Trans. Mechatronics, vol. 26, no. 1, pp. 311–322, 2021.
|
| [78] |
Y. Zhang, X. Liu, M. Luo, and C. Yang, “MPC-based 3-D trajectory tracking for an autonomous underwater vehicle with constraints in complex ocean environments,” Ocean Engineering, vol. 189, p. 106309, 2019. doi: 10.1016/j.oceaneng.2019.106309
|
| [79] |
W. Gan, D. Zhu, Z. Hu, X. Shi, L. Yang, and Y. Chen, “Model predictive adaptive constraint tracking control for underwater vehicles,” IEEE Trans. Industrial Electronics, vol. 67, no. 9, pp. 7829–7840, 2020. doi: 10.1109/TIE.2019.2941132
|
| [80] |
Z. Yan, P. Gong, W. Zhang, and W. Wu, “Model predictive control of autonomous underwater vehicles for trajectory tracking with external disturbances,” Ocean Engineering, vol. 217, p. 107884, 2020. doi: 10.1016/j.oceaneng.2020.107884
|
| [81] |
B. J. Guerreiro, C. Silvestre, R. Cunha, and A. Pascoal, “Trajectory tracking nonlinear model predictive control for autonomous surface craft,” IEEE Trans. Control Systems Technology, vol. 22, no. 6, pp. 2160–2175, 2014. doi: 10.1109/TCST.2014.2303805
|
| [82] |
C. Shen, B. Buckham, and Y. Shi, “Modified C/GMRES algorithm for fast nonlinear model predictive tracking control of AUVs,” IEEE Trans. Control Systems Technology, vol. 25, no. 5, pp. 1896–1904, 2017. doi: 10.1109/TCST.2016.2628803
|
| [83] |
C. Shen and Y. Shi, “Distributed implementation of nonlinear model predictive control for AUV trajectory tracking,” Automatica, vol. 115, p. 108863, 2020.
|
| [84] |
D. M. de la Peña and P. D. Christofides, “Lyapunov-based model predictive control of nonlinear systems subject to data losses,” IEEE Trans. Automatic Control, vol. 53, no. 9, pp. 2076–2089, 2008. doi: 10.1109/TAC.2008.929401
|
| [85] |
D. Q. Mayne, “Model predictive control: Recent developments and future promise,” Automatica, vol. 50, no. 12, pp. 2967–2986, 2014. doi: 10.1016/j.automatica.2014.10.128
|
| [86] |
S. Heshmati-Alamdari, G. C. Karras, P. Marantos, and K. J. Kyriakopoulos, “A robust predictive control approach for underwater robotic vehicles,” IEEE Trans. Control Systems Technology, vol. 28, no. 6, pp. 2352–2363, 2020. doi: 10.1109/TCST.2019.2939248
|
| [87] |
M. Abdelaal, M. Fränzle, and A. Hahn, “Nonlinear model predictive control for trajectory tracking and collision avoidance of underactuated vessels with disturbances,” Ocean Engineering, vol. 160, pp. 168–180, 2018. doi: 10.1016/j.oceaneng.2018.04.026
|
| [88] |
Y. Dai, S. Yu, Y. Yan, and X. Yu, “An EKF-based fast tube mpc scheme for moving target tracking of a redundant underwater vehicle-manipulator system,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 6, pp. 2803–2814, 2019. doi: 10.1109/TMECH.2019.2943007
|
| [89] |
Y. Dai, S. Yu, and Y. Yan, “An adaptive EKF-FMPC for the trajectory tracking of UVMs,” IEEE Journal of Oceanic Engineering, vol. 45, no. 3, pp. 699–713, 2020. doi: 10.1109/JOE.2019.2899689
|
| [90] |
S. Kong, J. Sun, C. Qiu, Z. Wu, and J. Yu, “Extended state observer-based controller with model predictive governor for 3-D trajectory tracking of underactuated underwater vehicles,” IEEE Trans. Industrial Informatics, vol. 17, no. 9, pp. 6114–6124, 2021. doi: 10.1109/TII.2020.3036665
|
| [91] |
C. Long, X. Qin, Y. Bian, and M. Hu, “Trajectory tracking control of ROVs considering external disturbances and measurement noises using ESKF-based MPC,” Ocean Engineering, vol. 241, p. 109991, 2021.
|
| [92] |
Y. Cui, L. Peng, and H. Li, “Filtered probabilistic model predictive control-based reinforcement learning for unmanned surface vehicles,” IEEE Trans. Industrial Informatics, vol. 18, no. 10, pp. 6950–6961, 2022. doi: 10.1109/TII.2022.3142323
|
| [93] |
A. B. Martinsen, A. M. Lekkas, and S. Gros, “Reinforcement learning-based NMPC for tracking control of ASVs: Theory and experiments,” Control Engineering Practice, vol. 120, p. 105024, 2022. doi: 10.1016/j.conengprac.2021.105024
|
| [94] |
W. Wang, N. Hagemann, C. Ratti, and D. Rus, “Adaptive nonlinear model predictive control for autonomous surface vessels with largely varying payload,” in Proc. IEEE Int. Conf. Robotics and Automation, 2021, pp. 7337–7343.
|
| [95] |
H. Zhang, D. Zhu, C. Liu, and Z. Hu, “Tracking fault-tolerant control based on model predictive control for human occupied vehicle in three-dimensional underwater workspace,” Ocean Engineering, vol. 249, p. 110845, 2022. doi: 10.1016/j.oceaneng.2022.110845
|
| [96] |
H. Liang, H. Li, and D. Xu, “Nonlinear model predictive trajectory tracking control of underactuated marine vehicles: Theory and experiment,” IEEE Trans. Industrial Electronics, vol. 68, no. 5, pp. 4238–4248, 2021. doi: 10.1109/TIE.2020.2987284
|
| [97] |
W. Wang, L. A. Mateos, S. Park, P. Leoni, B. Gheneti, F. Duarte, C. Ratti, and D. Rus, “Design, modeling, and nonlinear model predictive tracking control of a novel autonomous surface vehicle,” in Proc. IEEE Int. Conf. Robotics and Automation, 2018, pp. 6189–6196.
|
| [98] |
W. Wang, T. Shan, P. Leoni, D. Fernández-Gutiérrez, D. Meyers, C. Ratti, and D. Rus, “Roboat II: A novel autonomous surface vessel for urban environments,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, 2020, pp. 1740–1747.
|
| [99] |
R. M. Saback, A. G. S. Conceicao, T. L. M. Santos, J. Albiez, and M. Reis, “Nonlinear model predictive control applied to an autonomous underwater vehicle,” IEEE Journal of Oceanic Engineering, vol. 45, no. 3, pp. 799–812, 2019.
|
| [100] |
J. Wang, Z. Wu, M. Tan, and J. Yu, “Model predictive control-based depth control in gliding motion of a gliding robotic dolphin,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 51, no. 9, pp. 5466–5477, 2021. doi: 10.1109/TSMC.2019.2956531
|
| [101] |
E. Yang and D. Gu, “Nonlinear formation-keeping and mooring control of multiple autonomous underwater vehicles,” IEEE/ASME Trans. Mechatronics, vol. 12, no. 2, pp. 164–178, 2007. doi: 10.1109/TMECH.2007.892826
|
| [102] |
R. Cui, S. S. Ge, B. V. E. How, and Y. S. Choo, “Leader-follower formation control of underactuated autonomous underwater vehicles,” Ocean Engineering, vol. 37, no. 17–18, pp. 1491–1502, 2010. doi: 10.1016/j.oceaneng.2010.07.006
|
| [103] |
Y.-L. Wang and Q.-L. Han, “Network-based modelling and dynamic output feedback control for unmanned marine vehicles in network environments,” Automatica, vol. 91, pp. 43–53, 2018. doi: 10.1016/j.automatica.2018.01.026
|
| [104] |
Y.-L. Wang, Q.-L. Han, M.-R. Fei, and C. Peng, “Network-based T-S fuzzy dynamic positioning controller design for unmanned marine vehicles,” IEEE Trans. Cybernetics, vol. 48, no. 9, pp. 2750–2763, 2018. doi: 10.1109/TCYB.2018.2829730
|
| [105] |
H. Li and Y. Shi, Robust Receding Horizon Control for Networked and Distributed Nonlinear Systems. Springer, 2017.
|
| [106] |
H. Wei, Q. Sun, J. Chen, and Y. Shi, “Robust distributed model predictive platooning control for heterogeneous autonomous surface vehicles,” Control Engineering Practice, vol. 107, p. 104655, 2021. doi: 10.1016/j.conengprac.2020.104655
|
| [107] |
H. Zheng, R. R. Negenborn, and G. Lodewijks, “Fast ADMM for distributed model predictive control of cooperative waterborne AGVs,” IEEE Trans. Control Systems Technology, vol. 25, no. 4, pp. 1406–1413, 2016.
|
| [108] |
H. Zheng, R. R. Negenborn, and G. Lodewijks, “Robust distributed predictive control of waterborne AGVs-A cooperative and cost-effective approach,” IEEE Trans. Cybernetics, vol. 48, no. 8, pp. 2449–2461, 2017.
|
| [109] |
L. Chen, H. Hopman, and R. R. Negenborn, “Distributed model predictive control for vessel train formations of cooperative multi-vessel systems,” Transportation Research Part C: Emerging Technologies, vol. 92, pp. 101–118, 2018. doi: 10.1016/j.trc.2018.04.013
|
| [110] |
L. Chen, H. Hopman, and R. R. Negenborn, “Distributed model predictive control for cooperative floating object transport with multi-vessel systems,” Ocean Engineering, vol. 191, p. 106515, 2019. doi: 10.1016/j.oceaneng.2019.106515
|
| [111] |
L. Chen, Y. Huang, H. Zheng, H. Hopman, and R. Negenborn, “Cooperative multi-vessel systems in urban waterway networks,” IEEE Trans. Intelligent Transportation Systems, vol. 21, no. 8, pp. 3294–3307, 2020. doi: 10.1109/TITS.2019.2925536
|
| [112] |
H. Li, P. Xie, and W. Yan, “Receding horizon formation tracking control of constrained underactuated autonomous underwater vehicles,” IEEE Trans. Industrial Electronics, vol. 64, no. 6, pp. 5004–5013, 2017. doi: 10.1109/TIE.2016.2589921
|
| [113] |
F. Fahimi, “Non-linear model predictive formation control for groups of autonomous surface vessels,” Int. Journal of Control, vol. 80, no. 8, pp. 1248–1259, 2007. doi: 10.1080/00207170701280911
|
| [114] |
H. Wei, C. Shen, and Y. Shi, “Distributed Lyapunov-based model predictive formation tracking control for autonomous underwater vehicles subject to disturbances,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 51, no. 8, pp. 5198–5208, 2021. doi: 10.1109/TSMC.2019.2946127
|
| [115] |
S. L. de Oliveira Kothare and M. Morari, “Contractive model predictive control for constrained nonlinear systems,” IEEE Trans. Automatic Control, vol. 45, no. 6, pp. 1053–1071, 2000. doi: 10.1109/9.863592
|
| [116] |
C. Shen, Y. Shi, and B. Buckham, “Trajectory tracking control of an autonomous underwater vehicle using Lyapunov-based model predictive control,” IEEE Trans. Industrial Electronics, vol. 65, no. 7, pp. 5796–5805, 2018. doi: 10.1109/TIE.2017.2779442
|
| [117] |
G. Lv, Z. Peng, H. Wang, L. Liu, D. Wang, and T. Li, “Extended-state-observer-based distributed model predictive formation control of under-actuated unmanned surface vehicles with collision avoidance,” Ocean Engineering, vol. 238, p. 109587, 2021.
|
| [118] |
N. T. Hung, A. M. Pascoal, and T. A. Johansen, “Cooperative path following of constrained autonomous vehicles with model predictive control and event-triggered communications,” Int. Journal of Robust and Nonlinear Control, vol. 30, no. 7, pp. 2644–2670, 2020. doi: 10.1002/rnc.4896
|
| [119] |
Y. Yang, Y. Wang, C. Manzie, and Y. Pu, “Real-time distributed MPC for multiple underwater vehicles with limited communication data-rates,” in Proc. IEEE American Control Conf., 2021, pp. 3314–3319.
|
| [120] |
G. Lv, Z. Peng, L. Liu, and J. Wang, “Barrier-certified distributed model predictive control of under-actuated autonomous surface vehicles via neurodynamic optimization,” IEEE Trans. Systems,Man,and Cybernetics: Systems, pp. 1–13, 2022.
|
| [121] |
M. van Pampus, A. Haseltalab, V. Garofano, V. Reppa, Y. Deinema, and R. Negenborn, “Distributed leader-follower formation control for autonomous vessels based on model predictive control,” in Proc. IEEE European Control Conf., 2021, pp. 2380–2387.
|
| [122] |
S. Krupínski, G. Allibert, M.-D. Hua, and T. Hamel, “An inertial-aided homography-based visual servo control approach for (almost) fully actuated autonomous underwater vehicles,” IEEE Trans. Robotics, vol. 33, no. 5, pp. 1041–1060, 2017. doi: 10.1109/TRO.2017.2700010
|
| [123] |
K. Zhang, Y. Shi, and H. Sheng, “Robust nonlinear model predictive control based visual servoing of quadrotor UAVs,” IEEE/ASME Trans. Mechatronics, vol. 26, no. 2, pp. 700–708, 2021. doi: 10.1109/TMECH.2021.3053267
|
| [124] |
S. Heshmati-Alamdari, A. Eqtami, G. C. Karras, D. V. Dimarogonas, and K. J. Kyriakopoulos, “A self-triggered visual servoing model predictive control scheme for under-actuated underwater robotic vehicles,” in Proc. IEEE Int. Conf. Robotics and Automation, 2014, pp. 3826–3831.
|
| [125] |
J. Gao, A. A. Proctor, Y. Shi, and C. Bradley, “Hierarchical model predictive image-based visual servoing of underwater vehicles with adaptive neural network dynamic control,” IEEE Trans. Cybernetics, vol. 46, no. 10, pp. 2323–2334, 2016. doi: 10.1109/TCYB.2015.2475376
|
| [126] |
J. Gao, X. Liang, Y. Chen, L. Zhang, and S. Jia, “Hierarchical image-based visual servoing of underwater vehicle manipulator systems based on model predictive control and active disturbance rejection control,” Ocean Engineering, vol. 229, p. 108814, 2021. doi: 10.1016/j.oceaneng.2021.108814
|
| [127] |
A. Haseltalab and R. R. Negenborn, “Model predictive maneuvering control and energy management for all-electric autonomous ships,” Applied Energy, vol. 251, p. 113308, 2019. doi: 10.1016/j.apenergy.2019.113308
|
| [128] |
N. Yang, D. Chang, M. Johnson-Roberson, and J. Sun, “Energy-optimal control for autonomous underwater vehicles using economic model predictive control,” IEEE Trans. Control Systems Technology, 2022. DOI: 10.1109/TCST.2022.3143366
|
| [129] |
K. Wang, J. Li, X. Yan, L. Huang, X. Jiang, Y. Yuan, R. Ma, and R. R. Negenborn, “A novel bi-level distributed dynamic optimization method of ship fleets energy consumption,” Ocean Engineering, vol. 197, p. 106802, 2020. doi: 10.1016/j.oceaneng.2019.106802
|
| [130] |
G. Bracco, M. Canale, and V. Cerone, “Optimizing energy production of an inertial sea wave energy converter via model predictive control,” Control Engineering Practice, vol. 96, p. 104299, 2020. doi: 10.1016/j.conengprac.2020.104299
|
| [131] |
A. Bourgois, “Safe & collaborative autonomous underwater docking,” Ph.D. dissertation, ENSTA Bretagne-École nationale supérieure de techniques avancées Bretagne, 2021.
|
| [132] |
G. Bitar, A. B. Martinsen, A. M. Lekkas, and M. Breivik, “Trajectory planning and control for automatic docking of ASVs with full-scale experiments,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 14488–14494, 2020. doi: 10.1016/j.ifacol.2020.12.1451
|
| [133] |
M. C. Nielsen, T. A. Johansen, and M. Blanke, “Cooperative rendezvous and docking for underwater robots using model predictive control and dual decomposition,” in Proc. IEEE European Control Conf., 2018, pp. 14–19.
|
| [134] |
D. M. Rachman, A. Maki, Y. Miyauchi, and N. Umeda, “Warm-started semionline trajectory planner for ship’s automatic docking (berthing),” Ocean Engineering, vol. 252, p. 111127, 2022.
|
| [135] |
N. Van Eck and L. Waltman, “Software survey: VOSviewer, a computer program for bibliometric mapping,” Scientometrics, vol. 84, no. 2, pp. 523–538, 2010. doi: 10.1007/s11192-009-0146-3
|
| [136] |
L. Ljung, “Perspectives on system identification,” Annual Reviews in Control, vol. 34, no. 1, pp. 1–12, 2010. doi: 10.1016/j.arcontrol.2009.12.001
|
| [137] |
C. De Persis and P. Tesi, “Formulas for data-driven control: Stabilization, optimality, and robustness,” IEEE Trans. Automatic Control, vol. 65, no. 3, pp. 909–924, 2020. doi: 10.1109/TAC.2019.2959924
|
| [138] |
H. J. Van Waarde, J. Eising, H. L. Trentelman, and M. K. Camlibel, “Data informativity: A new perspective on data-driven analysis and control,” IEEE Trans. Automatic Control, vol. 65, no. 11, pp. 4753–4768, 2020. doi: 10.1109/TAC.2020.2966717
|
| [139] |
J. Berberich, J. Köhler, M. A. Müller, and F. Allgöwer, “Data-driven model predictive control with stability and robustness guarantees,” IEEE Trans. Automatic Control, vol. 66, no. 4, pp. 1702–1717, 2021. doi: 10.1109/TAC.2020.3000182
|
| [140] |
J. Coulson, J. Lygeros, and F. Dorfler, “Distributionally robust chance constrained data-enabled predictive control,” IEEE Trans. Automatic Control, 2021.
|
| [141] |
E. Elokda, J. Coulson, P. N. Beuchat, J. Lygeros, and F. Dörfler, “Data-enabled predictive control for quadcopters,” Int. Journal of Robust and Nonlinear Control, vol. 31, no. 18, pp. 8916–8936, 2021. doi: 10.1002/rnc.5686
|
| [142] |
P. Tøndel, T. A. Johansen, and A. Bemporad, “An algorithm for multi-parametric quadratic programming and explicit MPC solutions,” Automatica, vol. 39, no. 3, pp. 489–497, 2003. doi: 10.1016/S0005-1098(02)00250-9
|
| [143] |
A. Alessio and A. Bemporad, “A survey on explicit model predictive control,” ser. Lecture Notes in Control and Information Sciences. Berlin, Heidelberg: Springer, 2009, vol. 384, pp. 345–369.
|
| [144] |
H. Wei, K. Zhang, and Y. Shi, “Distributed min-max MPC for dynamically coupled nonlinear systems: A self-triggered approach,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 6037–6042, 2020. doi: 10.1016/j.ifacol.2020.12.1671
|
| [145] |
H. Wei, K. Zhang, and Y. Shi, “Self-triggered min-max DMPC for asynchronous multiagent systems with communication delays,” IEEE Trans. Industrial Informatics, vol. 18, no. 10, pp. 6809–6817, 2022. doi: 10.1109/TII.2021.3127197
|
| [146] |
S. Richter, C. N. Jones, and M. Morari, “Computational complexity certification for real-time MPC with input constraints based on the fast gradient method,” IEEE Trans. Automatic Control, vol. 57, no. 6, pp. 1391–1403, 2011.
|
| [147] |
M. N. Zeilinger, D. M. Raimondo, A. Domahidi, M. Morari, and C. N. Jones, “On real-time robust model predictive control,” Automatica, vol. 50, no. 3, pp. 683–694, 2014. doi: 10.1016/j.automatica.2013.11.019
|
| [148] |
Z. Du, R. R. Negenborn, and V. Reppa, “Colregs-compliant collision avoidance for physically coupled multi-vessel systems with distributed MPC,” Ocean Engineering, vol. 260, p. 111917, 2022.
|
| [149] |
Z. Jia, H. Lu, S. Li, and W. Zhang, “Distributed dynamic rendezvous control of the AUV-USV joint system with practical disturbance compensations using model predictive control,” Ocean Engineering, vol. 258, p. 111268, 2022.
|
| [150] |
H. Esen, M. Adachi, D. Bernardini, A. Bemporad, D. Rost, and J. Knodel, “Control as a service (CaaS) cloud-based software architecture for automotive control applications,” in Proc. 2nd Int. Workshop Swarm at the Edge of the Cloud, 2015, pp. 13–18.
|
| [151] |
Q. Sun and Y. Shi, “Model predictive control as a secure service for cyber-physical systems: A cloud-edge framework,” IEEE Internet of Things Journal, 2021. DOI: 10.1109/JIOT.2021.3091981
|
| [152] |
H. Ishii, Y. Wang, and S. Feng, “An overview on multi-agent consensus under adversarial attacks,” Annual Reviews in Control, vol. 53, pp. 252–272, 2022. doi: 10.1016/j.arcontrol.2022.01.004
|
| [153] |
D. Zhang, G. Feng, Y. Shi, and D. Srinivasan, “Physical safety and cyber security analysis of multi-agent systems: A survey of recent advances,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 319–333, 2021. doi: 10.1109/JAS.2021.1003820
|
| [154] |
J. Chen and Y. Shi, “Stochastic model predictive control framework for resilient cyber-physical systems: Review and perspectives,” Philosophical Transactions of the Royal Society A, vol. 379, no. 2207, p. 20200371, 2021. doi: 10.1098/rsta.2020.0371
|
| [155] |
Q. Sun, K. Zhang, and Y. Shi, “Resilient model predictive control of cyber-physical systems under DoS attacks,” IEEE Trans. Industrial Informatics, vol. 16, no. 7, pp. 4920–4927, 2020. doi: 10.1109/TII.2019.2963294
|
| [156] |
Q. Sun, J. Chen, and Y. Shi, “Event-triggered robust mpc of nonlinear cyber-physical systems against DoS attacks,” Science China Information Sciences, vol. 65, no. 1, pp. 1–17, 2022.
|
| [157] |
I. R. Bertaska and K. D. von Ellenrieder, “Experimental evaluation of supervisory switching control for unmanned surface vehicles,” IEEE Journal of Oceanic Engineering, vol. 44, no. 1, pp. 7–28, 2018.
|
| [158] |
A. A. R. Newaz, T. Alam, G. M. Reis, L. Bobadilla, and R. N. Smith, “Long-term autonomy for AUVs operating under uncertainties in dynamic marine environments,” IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 6313–6320, 2021. doi: 10.1109/LRA.2021.3091697
|
| [159] |
A. Babić, G. Vasiljević, and N. Mišković, “Vehicle-in-the-loop framework for testing long-term autonomy in a heterogeneous marine robot swarm,” IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 4439–4446, 2020. doi: 10.1109/LRA.2020.3000426
|
| [160] |
L. Zhang, S. Zhuang, and R. D. Braatz, “Switched model predictive control of switched linear systems: Feasibility, stability and robustness,” Automatica, vol. 67, pp. 8–21, 2016. doi: 10.1016/j.automatica.2016.01.010
|
| [161] |
K. Zhang and Y. Shi, “Adaptive model predictive control for a class of constrained linear systems with parametric uncertainties,” Automatica, vol. 117, p. 108974, 2020.
|
| [162] |
R. Scattolini, “Architectures for distributed and hierarchical model predictive control–A review,” Journal of Process Control, vol. 19, no. 5, pp. 723–731, 2009. doi: 10.1016/j.jprocont.2009.02.003
|
| [163] |
P. D. Christofides, R. Scattolini, D. M. de la Pena, and J. Liu, “Distributed model predictive control: A tutorial review and future research directions,” Computers &Chemical Engineering, vol. 51, pp. 21–41, 2013.
|
| [164] |
R. R. Negenborn and J. M. Maestre, “Distributed model predictive control: An overview and roadmap of future research opportunities,” IEEE Control Systems Magazine, vol. 34, no. 4, pp. 87–97, 2014. doi: 10.1109/MCS.2014.2320397
|
| [165] |
T. Yang, X. Yi, J. Wu, Y. Yuan, D. Wu, Z. Meng, Y. Hong, H. Wang, Z. Lin, and K. H. Johansson, “A survey of distributed optimization,” Annual Reviews in Control, vol. 47, pp. 278–305, 2019. doi: 10.1016/j.arcontrol.2019.05.006
|
Figures(10) / Tables(2)






 DownLoad:
DownLoad: