2022, 9(11): 1990-2004.
doi: 10.1109/JAS.2022.105947
Abstract:
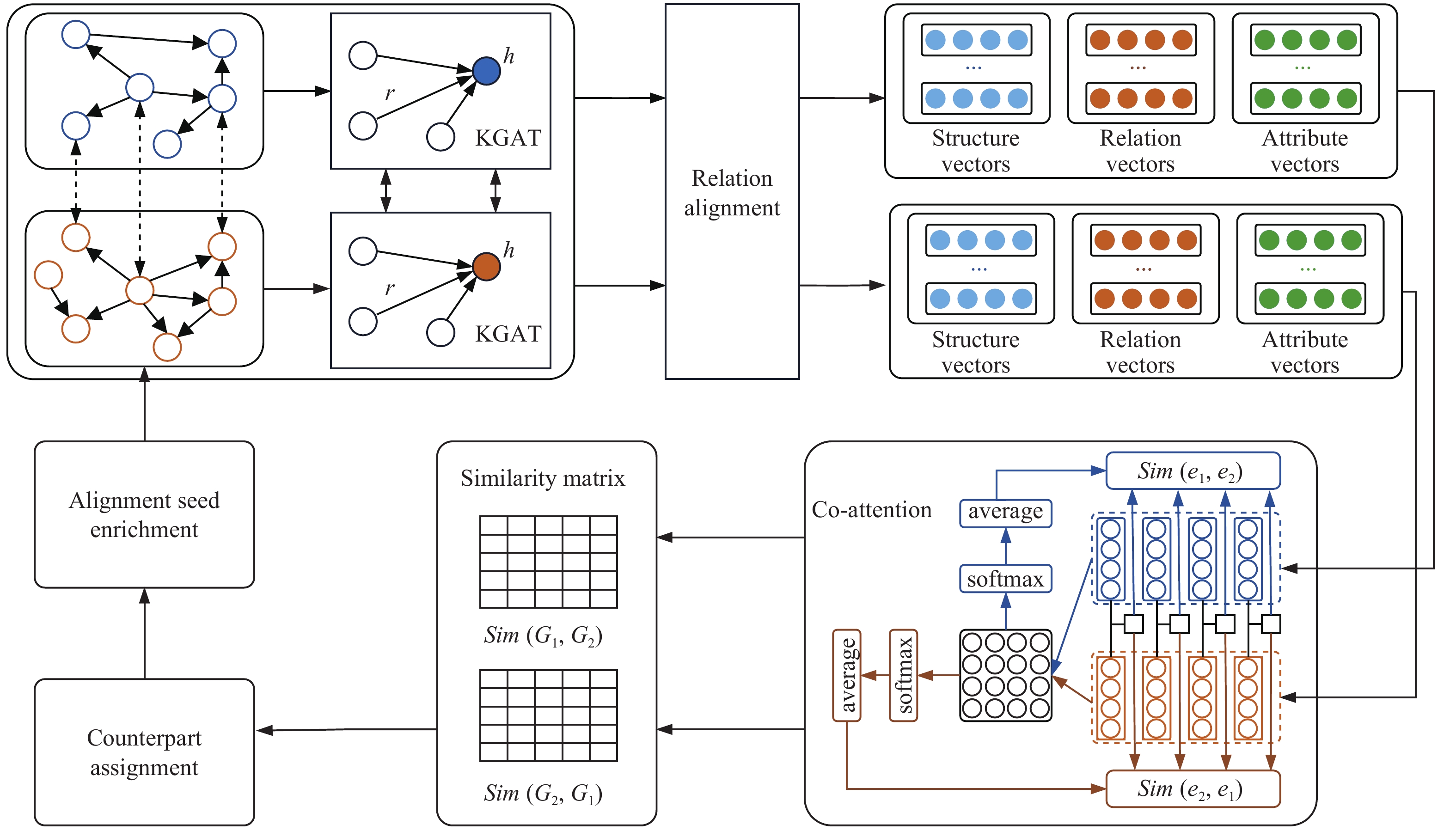
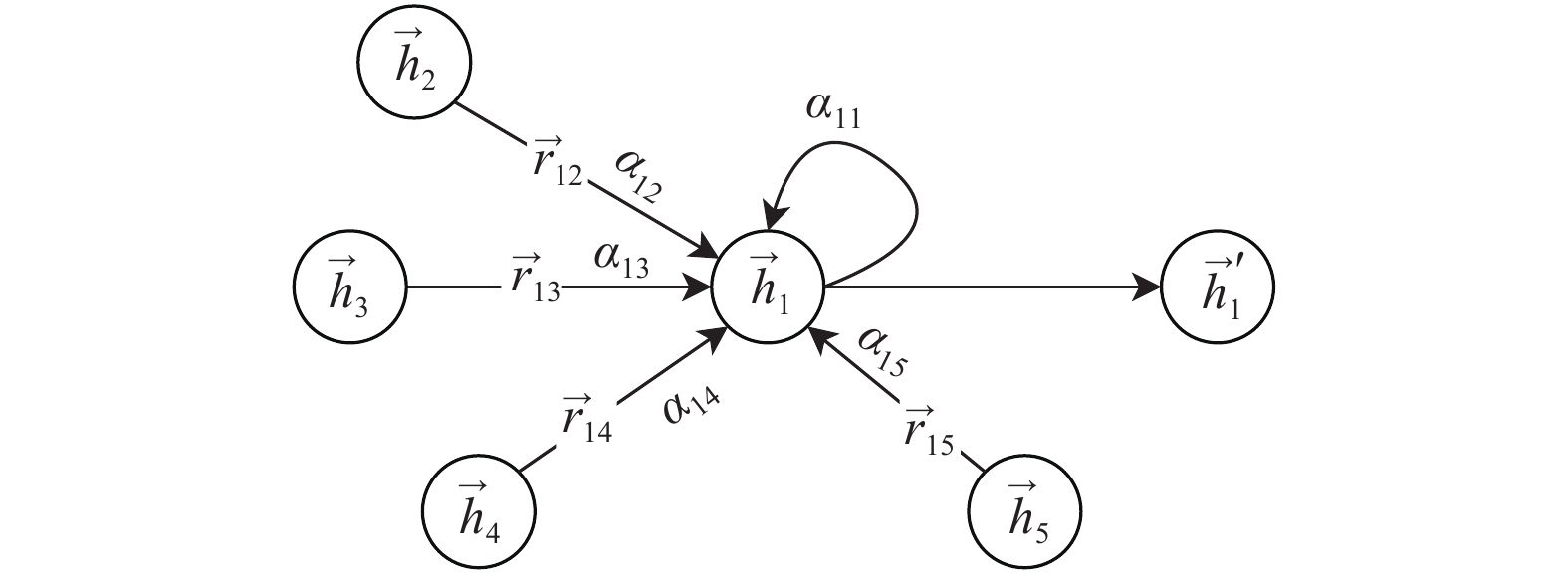
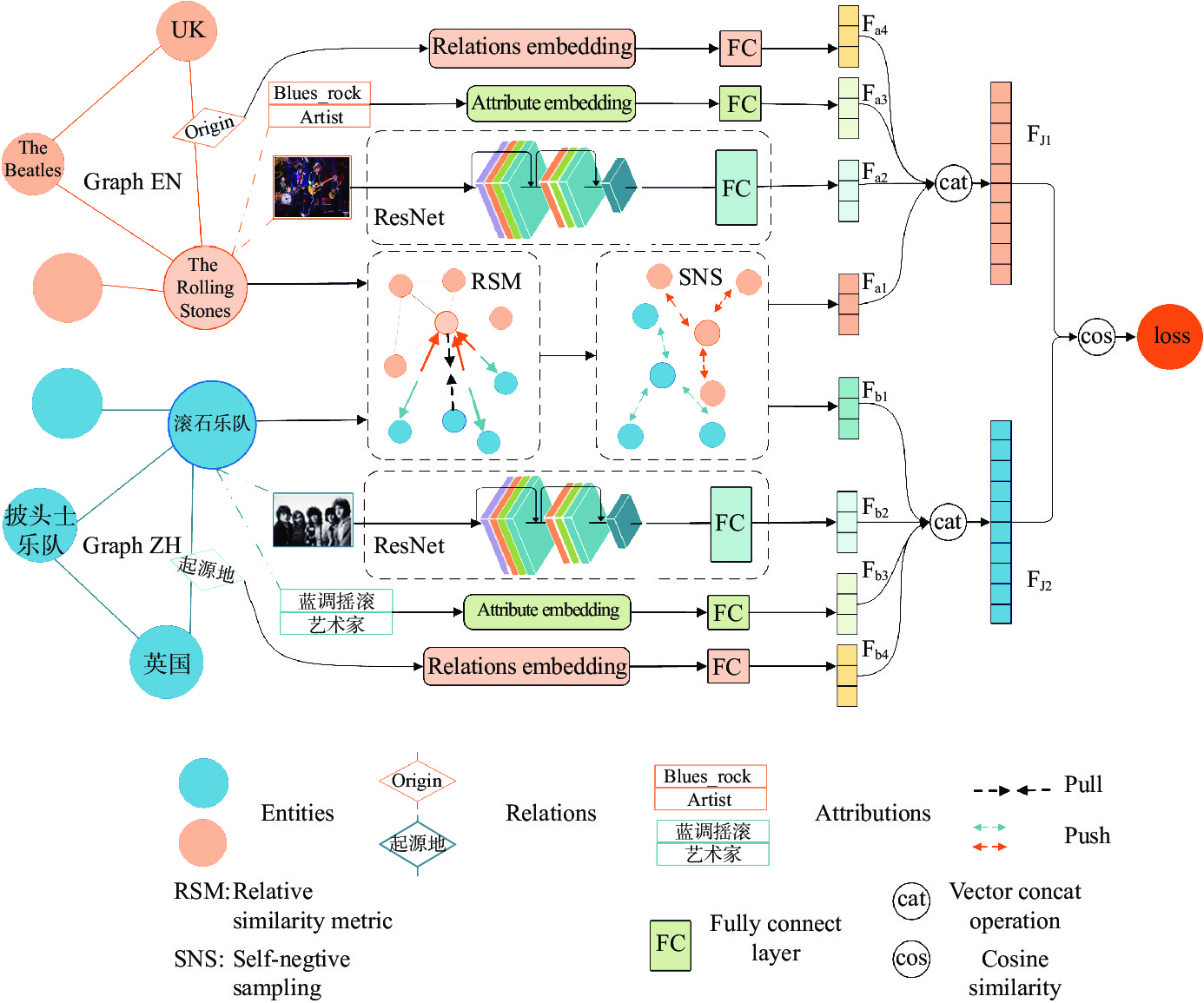
Knowledge graphs (KGs) have been widely accepted as powerful tools for modeling the complex relationships between concepts and developing knowledge-based services. In recent years, researchers in the field of power systems have explored KGs to develop intelligent dispatching systems for increasingly large power grids. With multiple power grid dispatching knowledge graphs (PDKGs) constructed by different agencies, the knowledge fusion of different PDKGs is useful for providing more accurate decision supports. To achieve this, entity alignment that aims at connecting different KGs by identifying equivalent entities is a critical step. Existing entity alignment methods cannot integrate useful structural, attribute, and relational information while calculating entities’ similarities and are prone to making many-to-one alignments, thus can hardly achieve the best performance. To address these issues, this paper proposes a collective entity alignment model that integrates three kinds of available information and makes collective counterpart assignments. This model proposes a novel knowledge graph attention network (KGAT) to learn the embeddings of entities and relations explicitly and calculates entities’ similarities by adaptively incorporating the structural, attribute, and relational similarities. Then, we formulate the counterpart assignment task as an integer programming (IP) problem to obtain one-to-one alignments. We not only conduct experiments on a pair of PDKGs but also evaluate our model on three commonly used cross-lingual KGs. Experimental comparisons indicate that our model outperforms other methods and provides an effective tool for the knowledge fusion of PDKGs.
L. Y. Yang, C. Lv, X. Wang, J. Qiao, W. P. Ding, J. Zhang, and F.-Y. Wang, “Collective entity alignment for knowledge fusion of power grid dispatching knowledge graphs,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 11, pp. 1990–2004, Nov. 2022. doi: 10.1109/JAS.2022.105947.






















 E-mail Alert
E-mail Alert