A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 11
Volume 9
Issue 11
IEEE/CAA Journal of Automatica Sinica
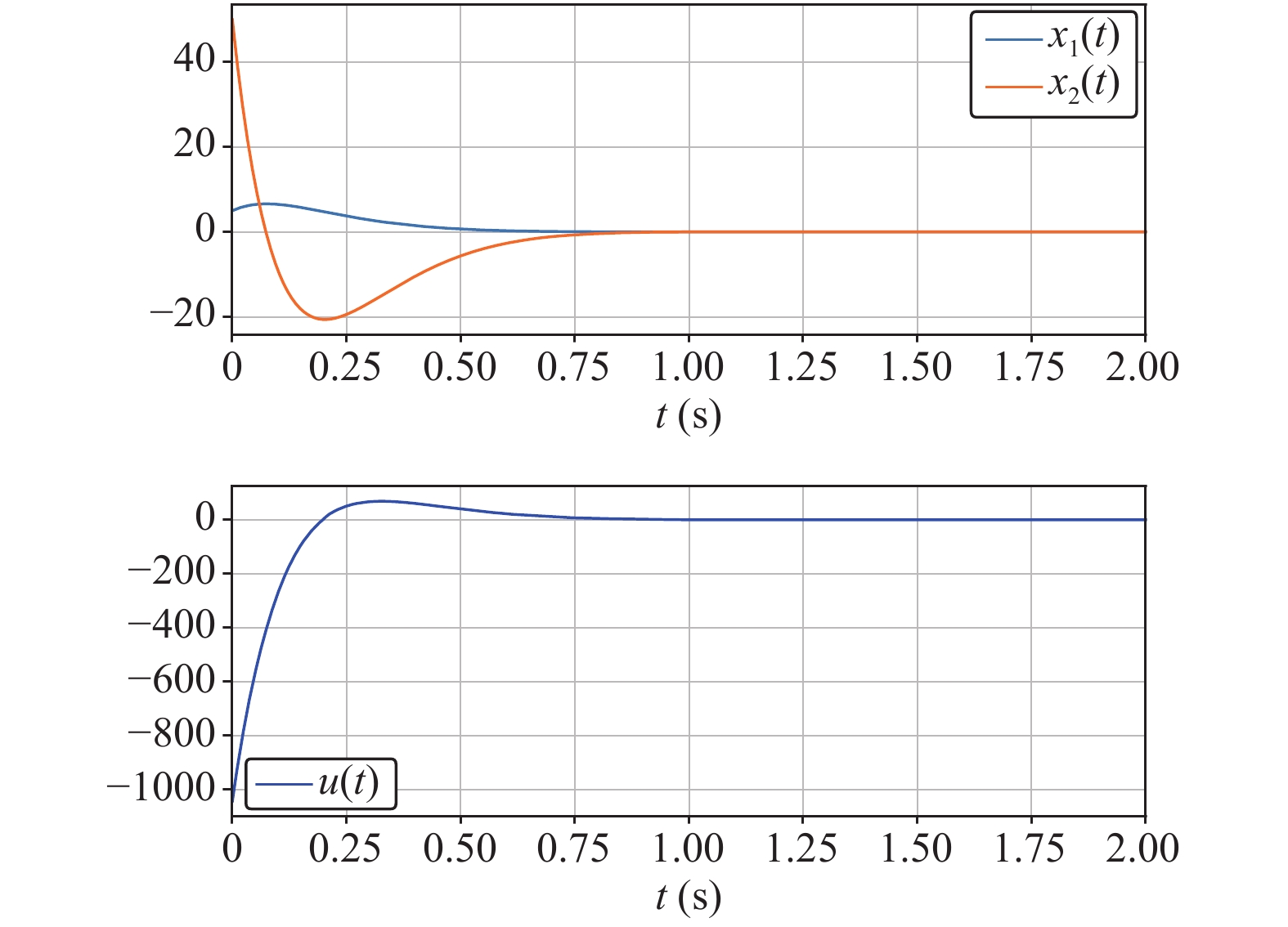
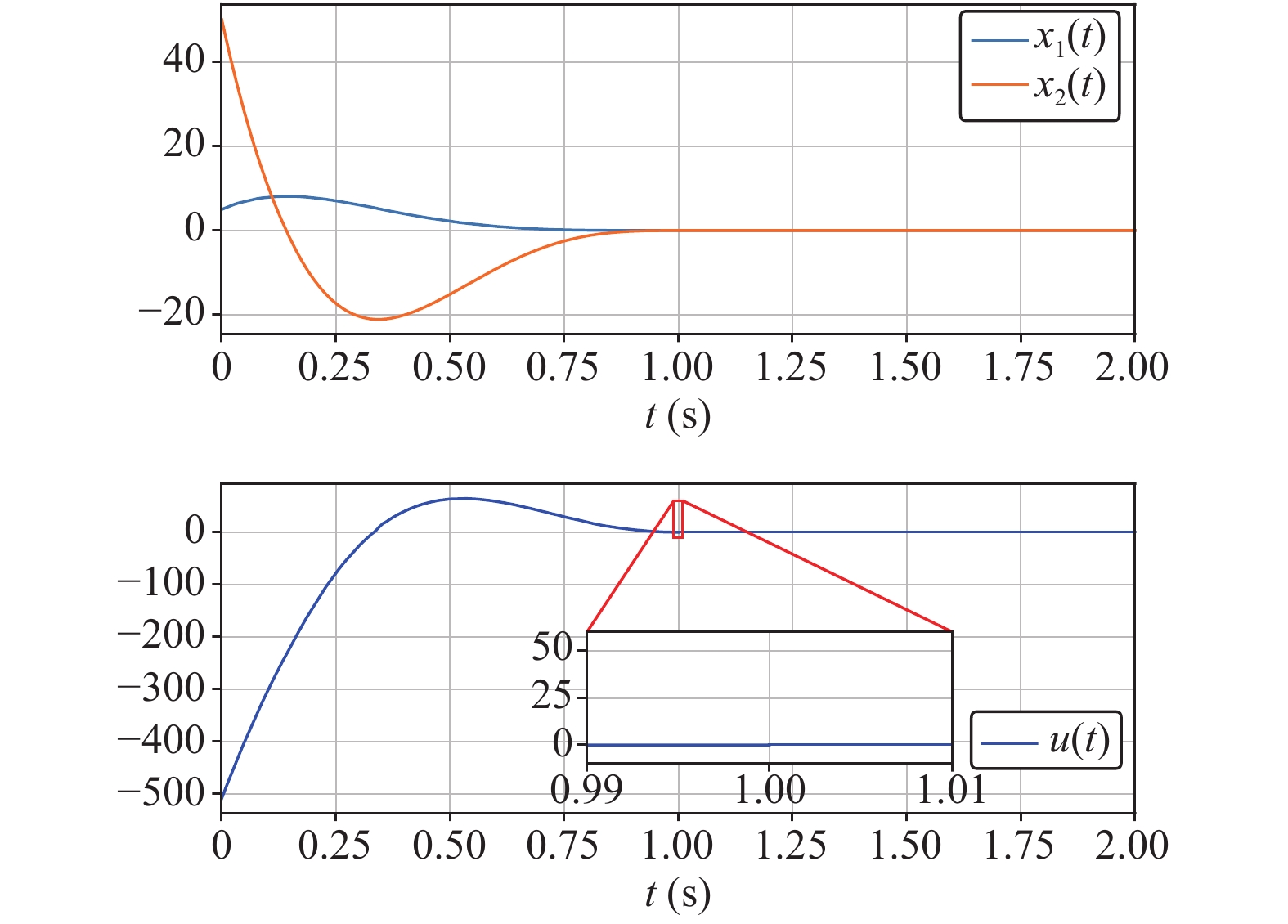
| Citation: | A. Garza-Alonso, M. Basin, and P. C. Rodriguez-Ramirez, “Predefined-time backstepping stabilization of autonomous nonlinear systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 11, pp. 2020–2022, Nov. 2022. doi: 10.1109/JAS.2022.105953

|

| [1] |
J. Tsinias, “A theorem on global stabilization of nonlinear systems by linear feedback,” Systems and Control Letters, vol. 17, no. 5, pp. 357–362, 1991. doi: 10.1016/0167-6911(91)90135-2
|
| [2] |
S. P. Bhat and D. S. Bernstein, “Finite-time stability of continuous autonomous systems,” SIAM J. Control and Optimization, vol. 38, no. 3, pp. 751–766, 2000. doi: 10.1137/S0363012997321358
|
| [3] |
X. Huang, W. Lin, and B. Yang, “Global finite-time stabilization of a class of uncertain nonlinear systems,” Automatica, vol. 41, no. 5, pp. 881–888, 2005. doi: 10.1016/j.automatica.2004.11.036
|
| [4] |
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear control systems,” IEEE Trans. Automatic Control, vol. 57, no. 8, pp. 2106–2110, 2012. doi: 10.1109/TAC.2011.2179869
|
| [5] |
C. Wang, H. Tnunay, Z. Zuo, B. Lennox, and Z. Ding, “Fixed-time formation control of multirobot systems: Design and experiments,” IEEE Trans. Industrial Electronics, vol. 66, no. 8, pp. 6292–6301, 2018.
|
| [6] |
Z. Zuo, “Fixed-time stabilization of general linear systems with input delay,” J. Franklin Institute, vol. 356, no. 8, pp. 4467–4477, 2019. doi: 10.1016/j.jfranklin.2019.04.006
|
| [7] |
Z. Zuo, J. Song, B. Tian, and M. Basin, “Robust fixed-time stabilization control of generic linear systems with mismatched disturbances,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 52, no. 2, pp. 759–768, 2022. doi: 10.1109/TSMC.2020.3010221
|
| [8] |
A. K. Pal, S. Kamal, S. K. Nagar, B. Bandyopadhyay, and L. Fridman, “Design of controllers with arbitrary convergence time,” Automatica, vol. 112, p. 108710, 2020.
|
| [9] |
E. Jiménez-Rodríguez, A. J. Muñoz-Vázquez, J. D. Sánchez-Torres, M. Defoort, and A. G. Loukianov, “A Lyapunov-like characterization of predefined-time stability,” IEEE Trans. Automatic Control, vol. 65, no. 11, pp. 4922–4927, 2020. doi: 10.1109/TAC.2020.2967555
|
| [10] |
A. Garza-Alonso, M. Basin, and P. Rodriguez-Ramirez, “Predefined-time stabilization of permanent-magnet synchronous motor,” Trans. Institute of Measurement and Control, vol. 43, no. 13, pp. 3044–3054, 2021. doi: 10.1177/01423312211016741
|
| [11] |
Y. Song, Y. Wang, J. Holloway, and M. Krstic, “Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite time,” Automatica, vol. 83, pp. 243–251, 2017. doi: 10.1016/j.automatica.2017.06.008
|
| [12] |
Y. Cao, C. Wen, S. Tan, and Y. Song, “Prespecifiable fixed-time control for a class of uncertain nonlinear systems in strict-feedback form,” Int. J. Robust and Nonlinear Control, vol. 30, no. 3, pp. 1203–1222, 2020. doi: 10.1002/rnc.4820
|
| [13] |
P. Krishnamurthy, F. Khorrami, and M. Krstic, “Robust adaptive prescribed-time stabilization via output feedback for uncertain nonlinear strict-feedback-like systems,” European J. Control, vol. 55, pp. 14–23, 2020. doi: 10.1016/j.ejcon.2019.09.005
|
| [14] |
B. Ning, Q.-L. Han, and Z. Zuo, “Bipartite consensus tracking for second-order multiagent systems: A time-varying function-based preset-time approach,” IEEE Trans. Automatic Control, vol. 66, no. 6, pp. 2739–2745, 2020.
|
| [15] |
B. Zhou and Y. Shi, “Prescribed-time stabilization of a class of nonlinear systems by linear time-varying feedback,” IEEE Trans. Automatic Control, vol. 66, no. 12, pp. 6123–6130, 2021. doi: 10.1109/TAC.2021.3061645
|
| [16] |
N. de la Cruz and M. Basin, “Predefined-time control of full-scale 4D model of permanent-magnet synchronous motor with deterministic disturbances and stochastic noises,” Actuators, vol. 10, p. 306, 2021.
|
Figures(2)






 DownLoad:
DownLoad: