A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 11
Volume 9
Issue 11
IEEE/CAA Journal of Automatica Sinica
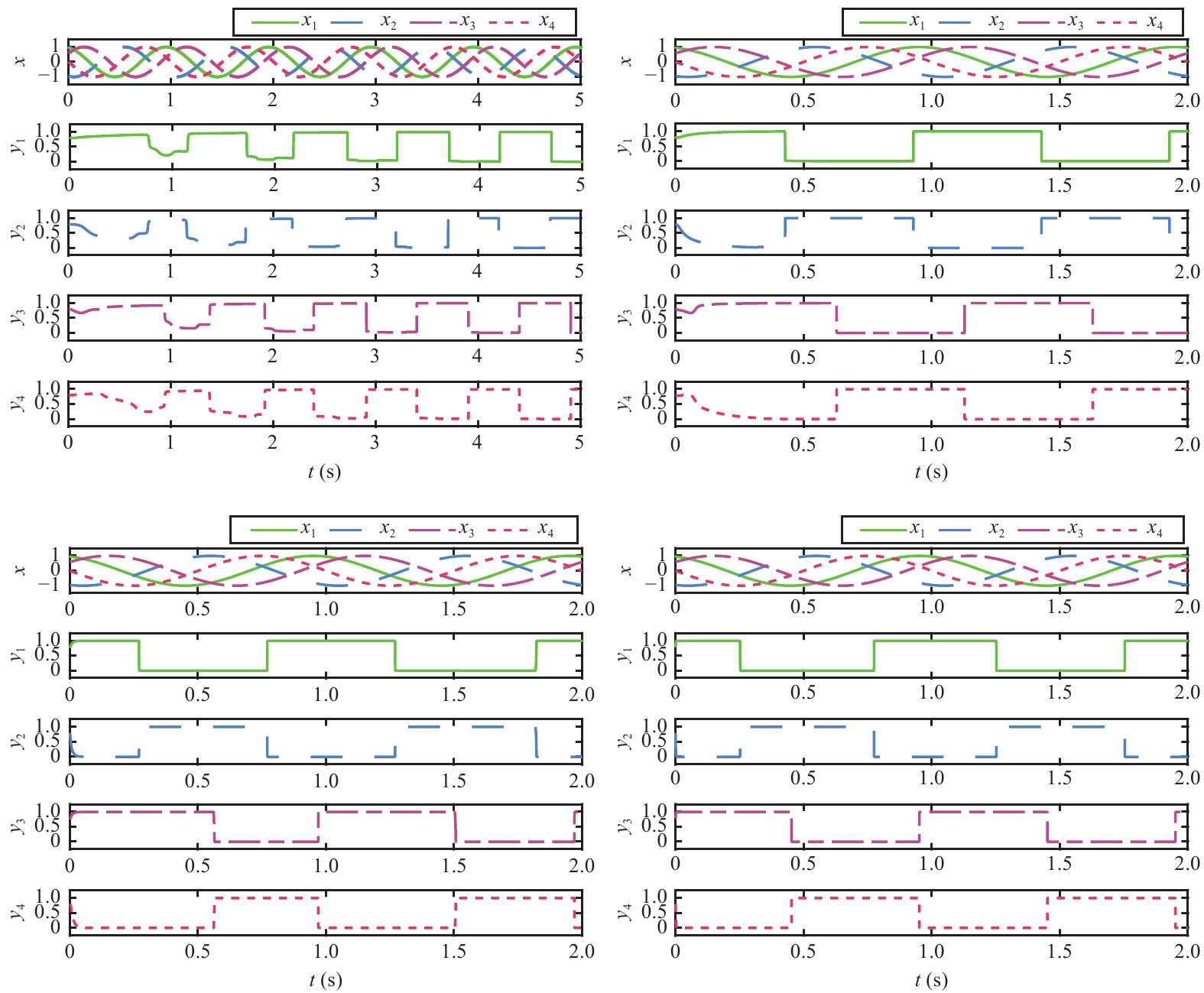
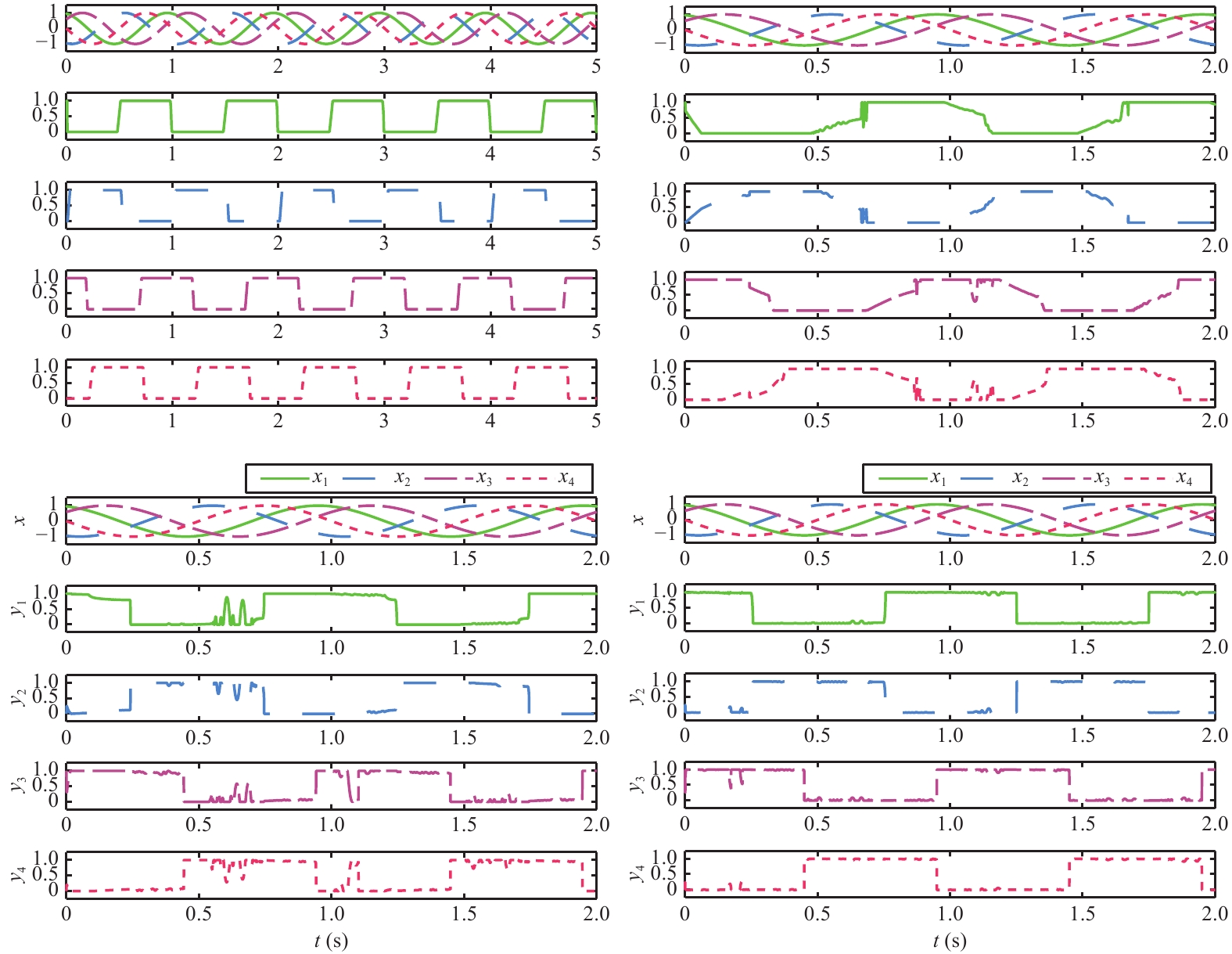
| Citation: | M. Liu and M. S. Shang, “On RNN-based k-WTA models with time-dependent inputs,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 11, pp. 2034–2036, Nov. 2022. doi: 10.1109/JAS.2022.105932

|

| [1] |
Y. Yang, L. Liao, H. Yang, and S. Li, “An optimal control strategy for multi-UAVs target tracking and cooperative competition,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 12, pp. 1931−1947, Jan. 2020.
|
| [2] |
M. Liu, S. Li, and L. Jin, “Modeling and analysis of Matthew effect under switching social networks via distributed competition,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 1−4, Jun. 2022.
|
| [3] |
J. Yang and C. Chen, “A dynamic k-winner-take-all neural network,” IEEE Trans. Syst. Man Cybern. -Syst. , vol. 51, no. 10, pp. 6466−6476, Oct. 2021.
|
| [4] |
L. Jin and S. Li, “Distributed task allocation of multiple robots: A control perspective,” IEEE Trans. Syst. Man Cybern. – Syst., vol. 48, no. 5, pp. 693−701, May 2018.
|
| [5] |
L. Cheng, Z. Hou, and F. Wu, “Recurrent neural network for non-smooth convex optimization problems with application to the identification of genetic regulatory networks,” IEEE Trans. Neural Netw. , vol. 22, no. 5, pp. 714−726, May 2011.
|
| [6] |
R. Jiao, K. Peng, and J. Dong, “Remaining useful life prediction for a roller in a hot strip mill based on deep recurrent neural networks,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 7, pp. 1345−1354, Jul. 2021.
|
| [7] |
B. Wu, J. Zhong, and C. Yang “A visual-based gesture prediction framework applied in social robots,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 3, pp. 510−519, Mar. 2022.
|
| [8] |
Q. Liu, C. Dang, and J. Cao, “A novel recurrent neural network with one neuron and finite-time convergence for k-winners-take-all operation,” IEEE Trans. Neural Netw. , vol. 21, no. 7, pp. 1140−1148, Jul. 2010.
|
| [9] |
S. Liu and J. Wang, “A simplified dual neural network for quadratic programming with its KWTA application,” IEEE Trans. Neural Netw. , vol. 17, no. 6, pp. 1500−1510, Nov. 2006.
|
| [10] |
Y. Qi, L. Jin, X. Luo, Y. Shi, and M. Liu, “Robust k-WTA network generation, analysis, and applications to multiagent coordination,” IEEE Trans. Cybern., 2021. DOI: 10.1109/TCYB.2021.3079457.
|
| [11] |
Y. Ju, D. Ding, X. He, Q.-L. Han, and G. Wei, “Consensus control of multi-agent systems using fault-estimation-in-the-loop: Dynamic event-triggered case,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 8, pp. 1440–1451, Aug. 2022. doi: 110.1109/JAS.2021.1004386
|
| [12] |
I. Ahmad, X. Ge, and Q.-L. Han, “Decentralized dynamic event-triggered communication and active suspension control of in-wheel motor driven electric vehicles with dynamic damping,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 971−986, May 2021.
|
| [13] |
J. Wang, Y. Hong, J. Wang, J. Xu, Y. Tang, Q. Han, and J. Kurths, “Cooperative and competitive multi-agent systems: From optimization to games,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 763−783, May 2022.
|
| [14] |
M. Liu, X. Zhang, M. Shang, and L. Jin, “Gradient-based differential kWTA network with application to competitive coordination of multiple robots,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 8, pp. 1452−1463, Aug 2022.
|
| [15] |
Y. Zhang, J. Wang, and Y. Xia, “A dual neural network for redundancy resolution of kinematically redundant manipulators subject to joint limits and joint velocity limits,” IEEE Trans. Neural Netw., vol. 14, no. 3, pp. 658−667, May 2003.
|
| [16] |
W. Li, “A recurrent neural network with explicitly definable convergence time for solving time-variant linear matrix equations,” IEEE Trans. Ind. Informat , vol. 14, no. 12, pp. 5289−5298, Dec. 2018.
|
Figures(2)






 DownLoad:
DownLoad: