A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 12
Volume 9
Issue 12
IEEE/CAA Journal of Automatica Sinica
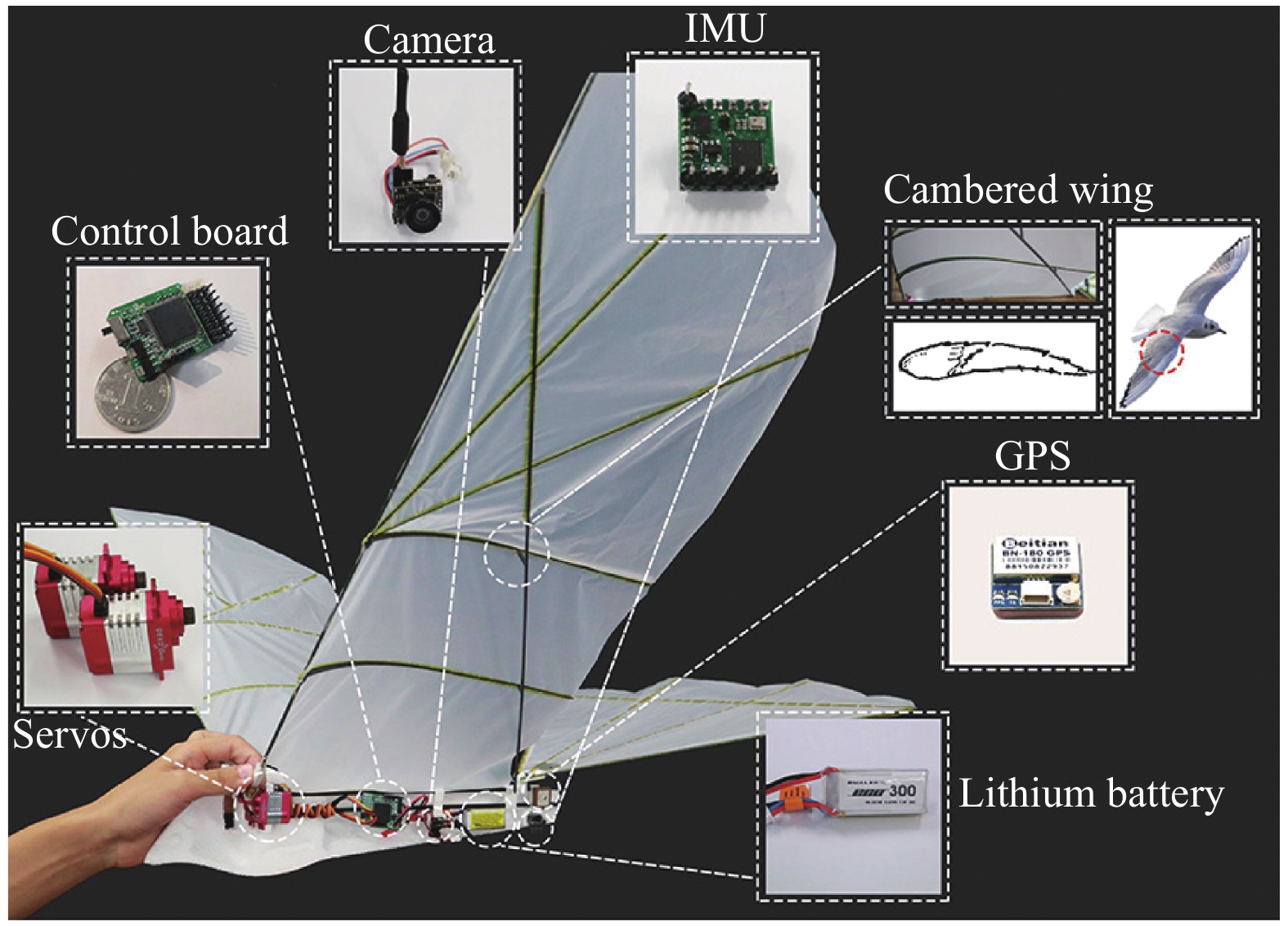
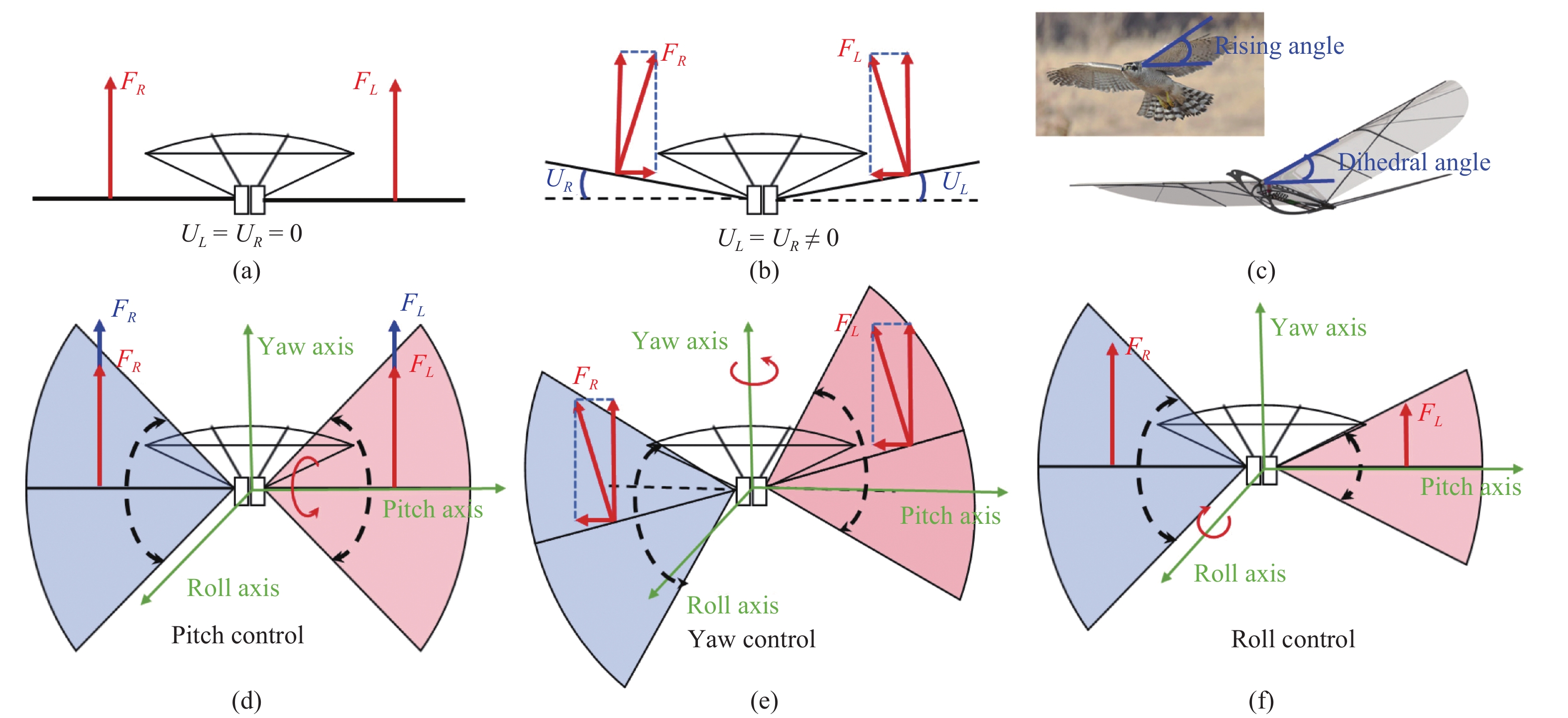
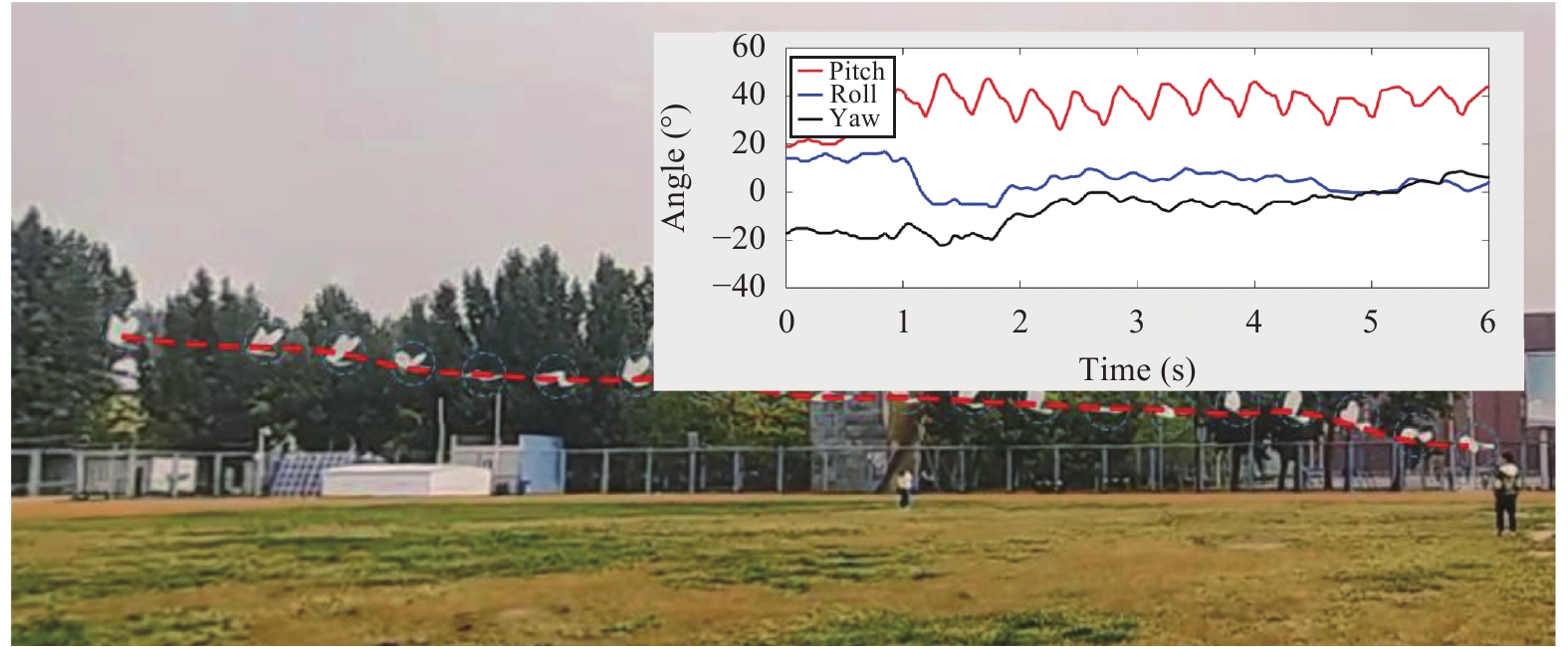
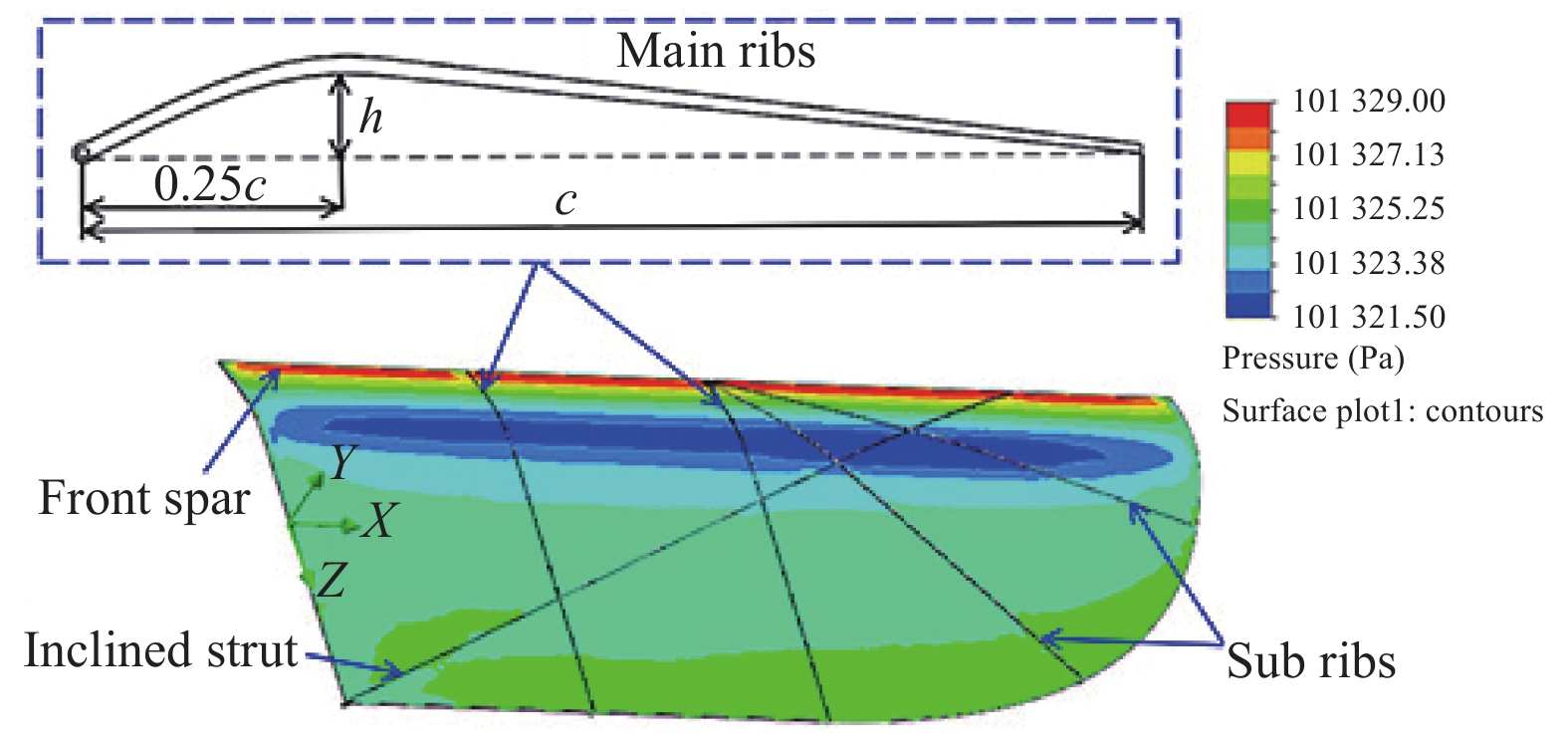
| Citation: | H. F. Huang, W. He, Q. Fu, X. Y. He, and C. Y. Sun, “A bio-inspired flapping-wing robot with cambered wings and its application in autonomous airdrop,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 12, pp. 2138–2150, Dec. 2022. doi: 10.1109/JAS.2022.106040

|

| [1] |
G. de Croon, “Flapping wing drones show off their skills,” Sci. Robot., vol. 5, no. 44, p. eabd0233, 2020. doi: 10.1126/scirobotics.abd0233
|
| [2] |
V. Arabagi, L. Hines, and M. Sitti, “Design and manufacturing of a controllable miniature flapping wing robotic platform,” Int. J. Robot. Res., vol. 31, no. 6, pp. 785–800, 2012. doi: 10.1177/0278364911434368
|
| [3] |
U. Pesavento and Z. J. Wang, “Flapping wing flight can save aerodynamic power compared to steady flight,” Phys. Rev. Lett., vol. 103, no. 11, p. 118102, 2009. doi: 10.1103/PhysRevLett.103.118102
|
| [4] |
M. Karasek, “Good vibrations for flapping-wing flyers,” Sci. Robot., vol. 5, no. 46, p. eabe4544, 2020. doi: 10.1126/scirobotics.abe4544
|
| [5] |
D. Floreano and R. J. Wood, “Science, technology and the future of small autonomous drones,” Nature, vol. 521, no. 7553, pp. 460–466, 2015. doi: 10.1038/nature14542
|
| [6] |
W. He, X. Mu, L. Zhang, and Y. Zou, “Modeling and trajectory tracking control for flapping-wing micro aerial vehicles,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 1, pp. 148–156, Jan. 2021. doi: 10.1109/JAS.2020.1003417
|
| [7] |
G. Bao, Y. Zhang, and Z. Zeng, “Memory analysis for memristors and memristive recurrent neural networks,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 96–105, Jan. 2019.
|
| [8] |
Z. Li, X. Li, Q. Li, H. Su, Z. Kan, and W. He, “Human-in-the-loop control of soft exosuits using impedance learning on different terrains,” IEEE Trans. Robot., vol. 38, no. 5, pp. 2979–2993, 2022.
|
| [9] |
J. Liu, S. Vazquez, L. Wu, A. Marquez, H. Gao, and L. G. Franquelo, “Extended state observer-based sliding-mode control for three-phase power converters,” IEEE Trans. Ind. Electron., vol. 64, no. 1, pp. 22–31, Jan. 2016.
|
| [10] |
J. Liu, L. Wu, C. Wu, W. Luo, and L. G. Franquelo, “Event-triggering dissipative control of switched stochastic systems via sliding mode,” Automatica, vol. 103, pp. 261–273, 2019. doi: 10.1016/j.automatica.2019.01.029
|
| [11] |
X. Jin, “Fault tolerant finite-time leadercfollower formation control for autonomous surface vessels with LOS range and angle constraints,” Automatica, vol. 68, pp. 228–236, 2016. doi: 10.1016/j.automatica.2016.01.064
|
| [12] |
X. Jin, “Adaptive fixed-time control for MIMO nonlinear systems with asymmetric output constraints using universal barrier functions,” IEEE Trans. Automat. Contr., vol. 64, no. 7, pp. 3046–3053, Oct. 2019. doi: 10.1109/TAC.2018.2874877
|
| [13] |
Z. Li, B. Huang, A. Ajoudani, C. Yang, C.-Y. Su, and A. Bicchi, “Asymmetric bimanual control of dual-arm exoskeletons for human-cooperative manipulations,” IEEE Trans. Robot., vol. 34, no. 1, pp. 264–271, Nov. 2017.
|
| [14] |
J. Chen and H. Qiao, “Muscle-synergies-based neuromuscular control for motion learning and generalization of a musculoskeletal system,” IEEE Trans. Syst.,Man,Cybern. A, vol. 51, no. 6, pp. 3993–4006, Jan. 2020.
|
| [15] |
J. Xie, S.-Y. Liu, and J.-X. Chen, “A framework for distributed semi-supervised learning using single-layer feedforward networks,” Machine Intelligence Research, vol. 19, no. 1, pp. 63–74, 2022. doi: 10.1007/s11633-022-1315-6
|
| [16] |
Z. Li, K. Zhao, L. Zhang, X. Wu, T. Zhang, Q. Li, X. Li, and C.-Y. Su, “Human-in-the-loop control of a wearable lower limb exoskeleton for stable dynamic walking,” IEEE/ASME Trans. Mechatronics, vol. 26, no. 5, pp. 2700–2711, Oct. 2020.
|
| [17] |
Q.-L. Dang, W. Xu, and Y.-F. Yuan, “A dynamic resource allocation strategy with reinforcement learning for multimodal multi-objective optimization,” Machine Intelligence Research, DOI: 10.1007/s11633-022-1314-7.
|
| [18] |
L. Kong, W. He, W. Chen, H. Zhang, and Y. Wang, “Dynamic movement primitives based robot skills learning,” Machine Intelligence Research.
|
| [19] |
A. Ramezani, S.-J. Chung, and S. Hutchinson, “A biomimetic robotic platform to study flight specializations of bats,” Sci. Robot., vol. 2, no. 3, p. eeal2505, 2017. doi: 10.1126/scirobotics.aal2505
|
| [20] |
Y. Zou, W. Zhang, and Z. Zhang, “Liftoff of an electromagnetically driven insect-inspired flapping-wing robot,” IEEE Trans. Robot., vol. 32, no. 5, pp. 1285–1289, Oct. 2016. doi: 10.1109/TRO.2016.2593449
|
| [21] |
R. J. Wood, “The first takeoff of a biologically inspired at-scale robotic insect,” IEEE Trans. Robot., vol. 24, no. 2, pp. 341–347, Dec. 2008. doi: 10.1109/TRO.2008.916997
|
| [22] |
K. Y. Ma, Chirarattananon, S. B. Fuller, and R. J. Wood, “Controlled flight of a biologically inspired, insect-scale robot,” Science, vol. 340, no. 6132, pp. 603–607, 2013. doi: 10.1126/science.1231806
|
| [23] |
Y. Chen, H. Wang, E. F. Helbling, N. T. Jafferis, R. Zufferey, A. Ong, K. Ma, N. Gravish, P. Chirarattananon, and M. Kovac, “A biologically inspired, flapping-wing, hybrid aerial-aquatic microrobot,” Sci. Robot., vol. 2, p. eaao5619, 2017.
|
| [24] |
N. T. Jafferis, E. F. Helbling, M. Karpelson, and R. J. Wood, “Untethered flight of an insect-sized flapping-wing microscale aerial vehicle,” Nature, vol. 570, no. 7762, pp. 491–495, 2019. doi: 10.1038/s41586-019-1322-0
|
| [25] |
G. C. De Croon, M. Groen, C. De Wagter, B. D. Remes, R. Ruijsink, and B. W. van Oudheusden, “Design, aerodynamics and autonomy of the delfly,” Bioinspir. Biomim., vol. 7, no. 2, p. 025003, 2012. doi: 10.1088/1748-3182/7/2/025003
|
| [26] |
C. De Wagter, S. Tijmons, B. D. Remes, and G. C. De Croon, “Autonomous flight of a 20-gram flapping wing mav with a 4-gram onboard stereo vision system,” in Proc. IEEE Int. Conf. Robot. Automat., 2014, pp. 4982–4987.
|
| [27] |
M. Karásek, F. T. Muijres, C. De Wagter, B. D. Remes, and G. C. De Croon, “A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns,” Science, vol. 361, no. 6407, pp. 1089–1094, 2018. doi: 10.1126/science.aat0350
|
| [28] |
H. V. Phan, S. Aurecianus, T. Kang, and H. C. Park, “Kubeetle-s: An insect-like, tailless, hover-capable robot that can fly with a low-torque control mechanism,” Int. J. Mic. Air Veh., vol. 11, p. 175682931986137, 2019.
|
| [29] |
H. V. Phan and H. Park, “Mechanisms of collision recovery in flying beetles and flapping-wing robots,” Science, vol. 370, no. 6521, pp. 1214–1219, 2020. doi: 10.1126/science.abd3285
|
| [30] |
D. Mackenzie, “A flapping of wings,” Science, vol. 335, no. 6075, pp. 1430–1433, 2012. doi: 10.1126/science.335.6075.1430
|
| [31] |
W. Yang, L. Wang, and B. Song, “Dove: A biomimetic flapping-wing micro air vehicle,” Int. J. Mic. Air Veh., vol. 10, no. 1, pp. 70–84, 2018. doi: 10.1177/1756829317734837
|
| [32] |
R. Zufferey, J. Tormo-Barbero, M. M. Guzmán, F. J. Maldonado, E. Sanchez-Laulhe, Gr au, M. Pérez, J. Á. Acosta, and A. Ollero, “Design of the high-payload flapping wing robot e-flap,” IEEE Robot. Autom. Lett., vol. 6, no. 2, pp. 3097–3104, Feb. 2021. doi: 10.1109/LRA.2021.3061373
|
| [33] |
J. Gerdes, A. Holness, A. Perez-Rosado, L. Roberts, A. Greisinger, E. Barnett, J. Kempny, D. Lingam, C.-H. Yeh, H. Bruck, and S. Gupta, “Robo raven: A flapping-wing air vehicle with highly compliant and independently controlled wings,” Soft Robot., vol. 1, no. 4, pp. 275–288, 2014. doi: 10.1089/soro.2014.0019
|
| [34] |
Z. Liu, Z. Han, Z. Zhao, and W. He, “Modeling and adaptive control for a spatial flexible spacecraft with unknown actuator failures,” Sci. China Inf. Sci., vol. 64, no. 5, pp. 1–16, 2021.
|
| [35] |
H. Lin, B. Zhao, D. Liu, and C. Alippi, “Data-based fault tolerant control for affine nonlinear systems through particle swarm optimized neural networks,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 954–964, Jul. 2020. doi: 10.1109/JAS.2020.1003225
|
| [36] |
Y. Liu, X. Chen, Y. Mei, and Y. Wu, “Observer-based boundary control for an asymmetric output-constrained flexible robotic manipulator,” Sci. China Inf. Sci., vol. 65, no. 3, pp. 1–3, 2022.
|
| [37] |
Y. Liu, X. Chen, Y. Wu, H. Cai, and H. Yokoi, “Adaptive neural network control of a flexible spacecraft subject to input nonlinearity and asymmetric output constraint,” IEEE Trans. Neural. Netw. Learn. Syst., DOI: 10.1109/TNNLS.2021.3072907, 2021.
|
| [38] |
Q. Fu, J. Wang, L. Gong, J. Wang, and W. He, “Obstacle avoidance of flapping-wing air vehicles based on optical flow and fuzzy control,” Transactions of Nanjing University of Aeronautics &Astronautics, vol. 38, no. 2, pp. 206–215, 2021.
|
| [39] |
Q. Fu, X. Wang, Y. Zou, and W. He, “A miniature video stabilization system for flapping-wing aerial vehicles,” Guidance,Navigation and Control, vol. 2, no. 1, p. 2250001, 2022. doi: 10.1142/S2737480722500017
|
| [40] |
P. Bai, E.-j. Cui, and H.-l. Zhan, “Aerodynamic characteristics, power requirements and camber effects of the pitching-down flapping hovering,” J. Bionic Eng., vol. 6, no. 2, pp. 120–134, 2009. doi: 10.1016/S1672-6529(08)60109-2
|
| [41] |
J. Gillies, A. Thomas, and G. Taylor, “Soaring and manoeuvring flight of a steppe eagle aquila nipalensis,” J. Avian Biol., vol. 42, no. 09, pp. 377–386, 2011.
|
| [42] |
H. V. Phan and H. Park, “Insect-inspired, tailless, hover-capable flapping-wing robots: Recent progress, challenges, and future directions,” Prog. Aerosp. Sci., vol. 111, p. 100573, 2019. doi: 10.1016/j.paerosci.2019.100573
|
| [43] |
R. J. Wood, E. Steltz, and R. Fearing, “Optimal energy density piezoelectric bending actuators,” Sens. Actuator A Phys., vol. 119, no. 2, pp. 476–488, 2005. doi: 10.1016/j.sna.2004.10.024
|
| [44] |
S.-G. Lee, H.-C. Park, S. D. Pandita, and Y. Yoo, “Performance improvement of IPMC (ionic polymer metal composites) for a flapping actuator,” Int. J. Control. Autom., vol. 4, no. 6, pp. 748–755, 2006.
|
| [45] |
S. N. Fry, R. Sayaman, and M. H. Dickinson, “The aerodynamics of free-flight maneuvers in drosophila,” Science, vol. 300, no. 5618, pp. 495–498, 2003. doi: 10.1126/science.1081944
|
| [46] |
V. A. Tucker, T. Cade, and A. E. Tucker, “Diving speeds and angles of a gyrfalcon (falco rusticolus),” J. Exp. Biol., vol. 201, no. 13, pp. 2061–2070, 1998. doi: 10.1242/jeb.201.13.2061
|
| [47] |
H. Huang, W. He, J. Wang, L. Zhang, and Q. Fu, “An all servo-driven bird-like flapping-wing aerial robot capable of autonomous flight,” IEEE/ASME Trans. Mechatronics, DOI: 10.1109/TMECH.2022.3182418, 2022.
|
| [48] |
A. E. Holness, H. A. Bruck, and S. K. Gupta, “Characterizing and modeling the enhancement of lift and payload capacity resulting from thrust augmentation in a propeller-assisted flapping wing air vehicle,” Int. J. Micro Air Veh., vol. 10, no. 1, pp. 50–69, 2018. doi: 10.1177/1756829317734836
|
| [49] |
S. Shkarayev, D. Silin, G. Abate, and R. Albertani, “Aerodynamics of cambered membrane flapping wings,” in Proc. 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, 2010, p. 58.
|
| [50] |
W. Shyy, H. Aono, S. Chimakurthi, Trizila, C.-K. Kang, C. Cesnik, and H. Liu, “Recent progress in flapping wing aerodynamics and aeroelasticity,” Prog. Aerosp. Sci., vol. 46, no. 7, pp. 284–327, 2010. doi: 10.1016/j.paerosci.2010.01.001
|
| [51] |
C. Morimoto and R. Chellappa, “Evaluation of image stabilization algorithms,” in Proc. IEEE Int. Conf. Acoust. Speech Signal Process., vol. 5, 1998, pp. 2789–2792.
|
Figures(19) / Tables(3)






 DownLoad:
DownLoad: