2023, 10(6): 1445-1461.
doi: 10.1109/JAS.2023.123396
Abstract:
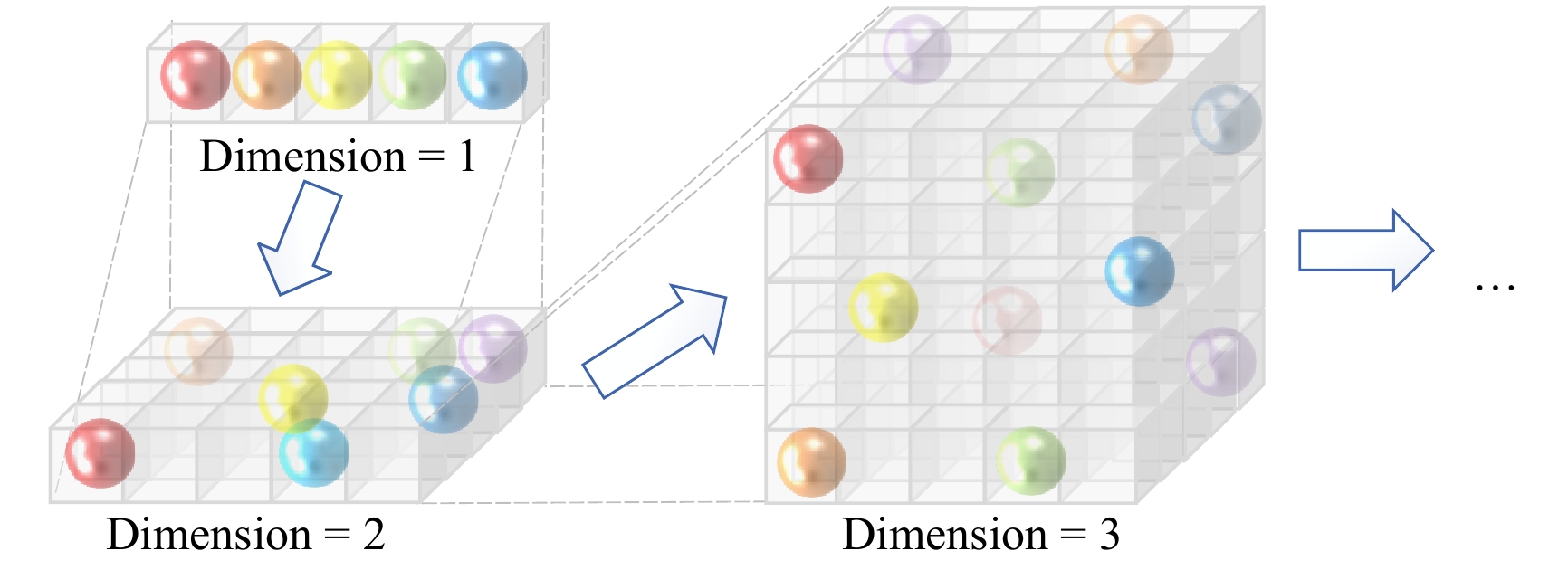
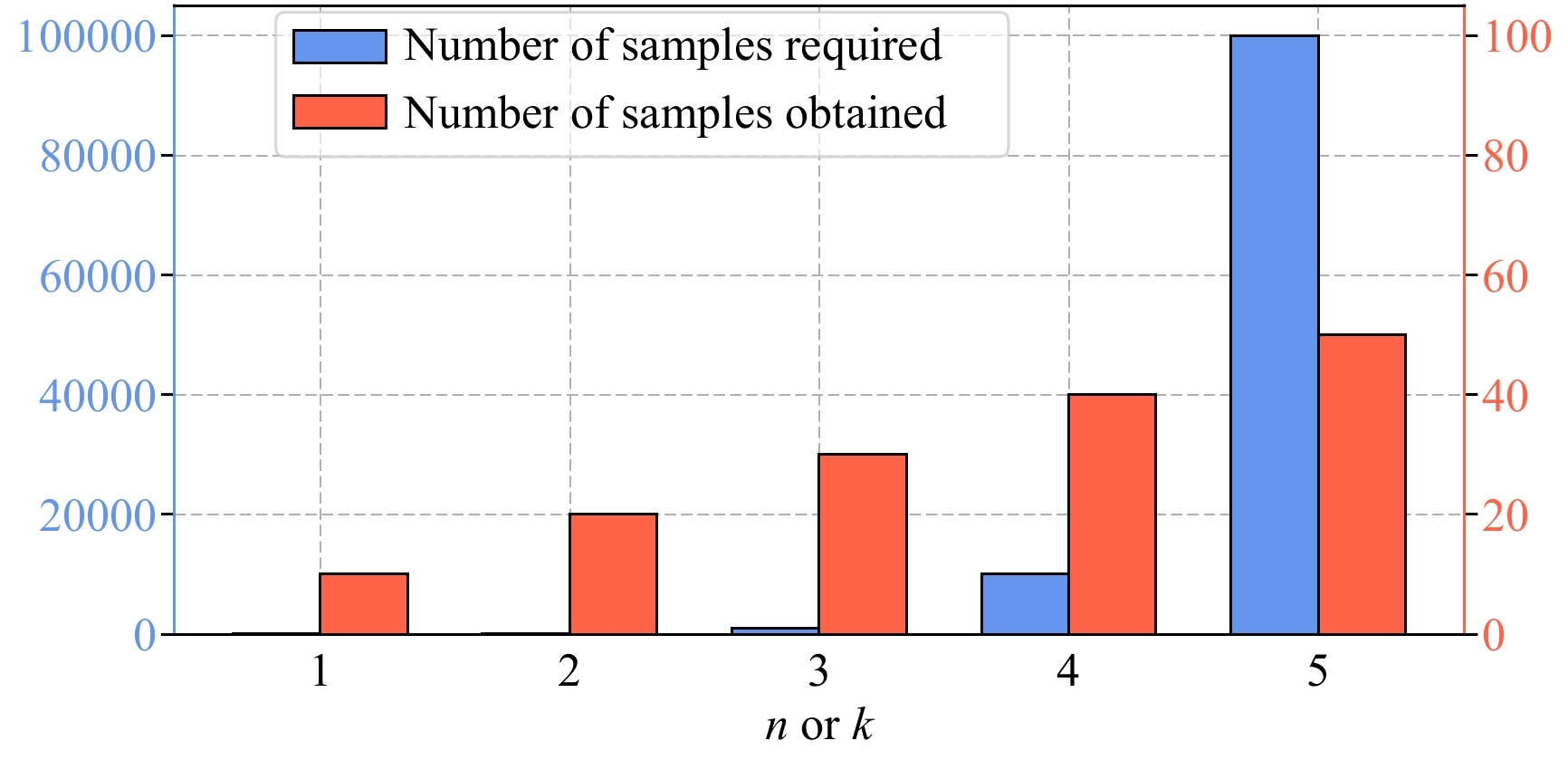
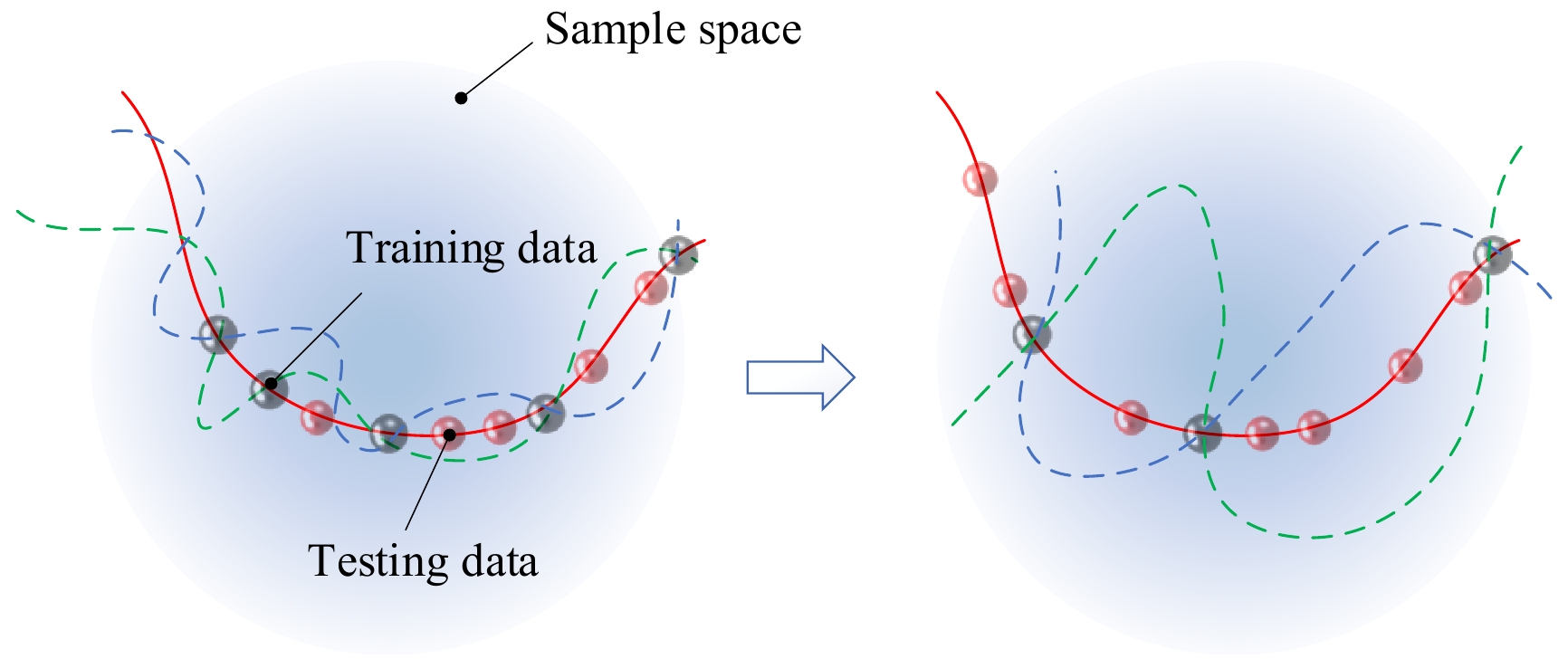
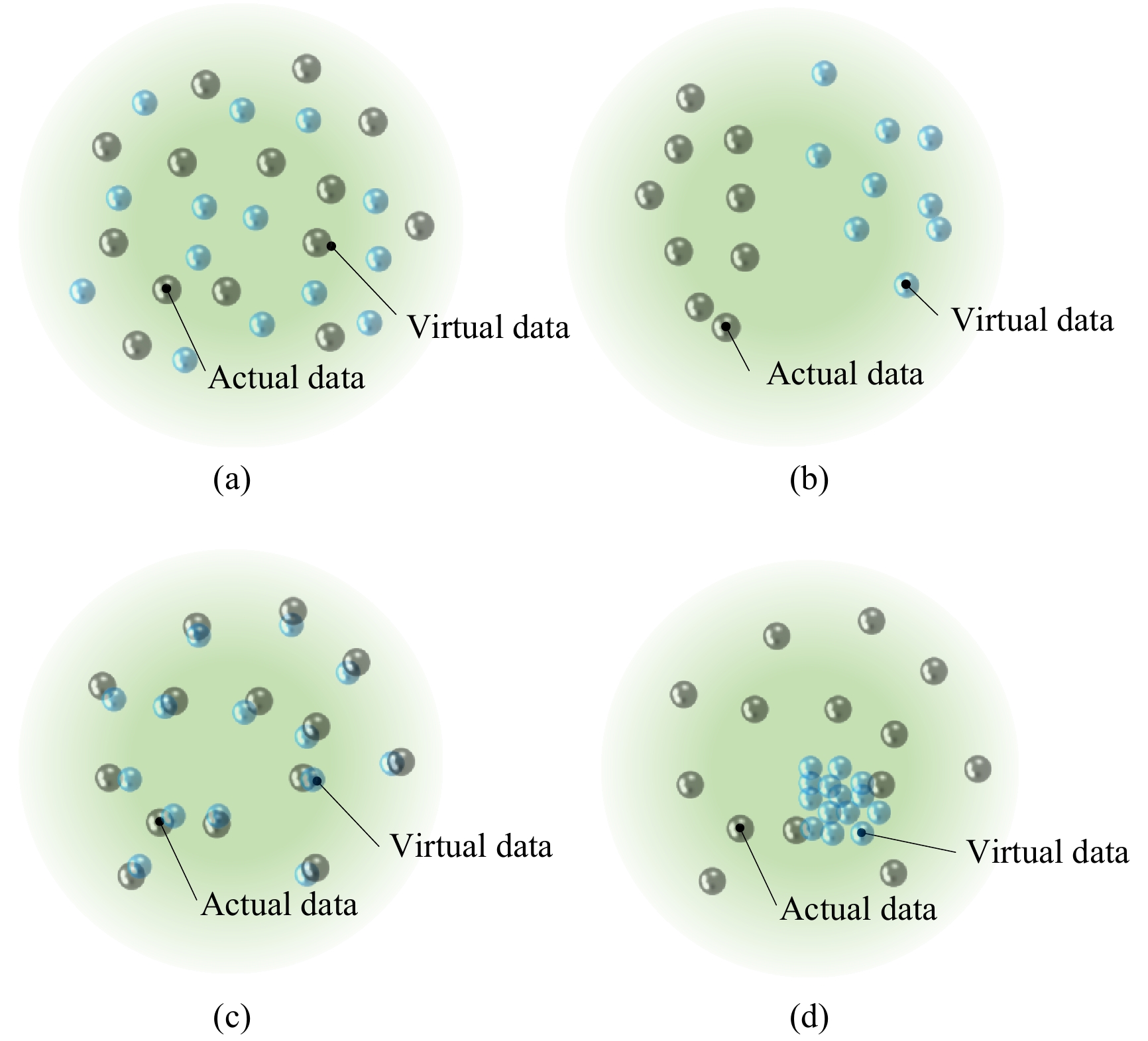
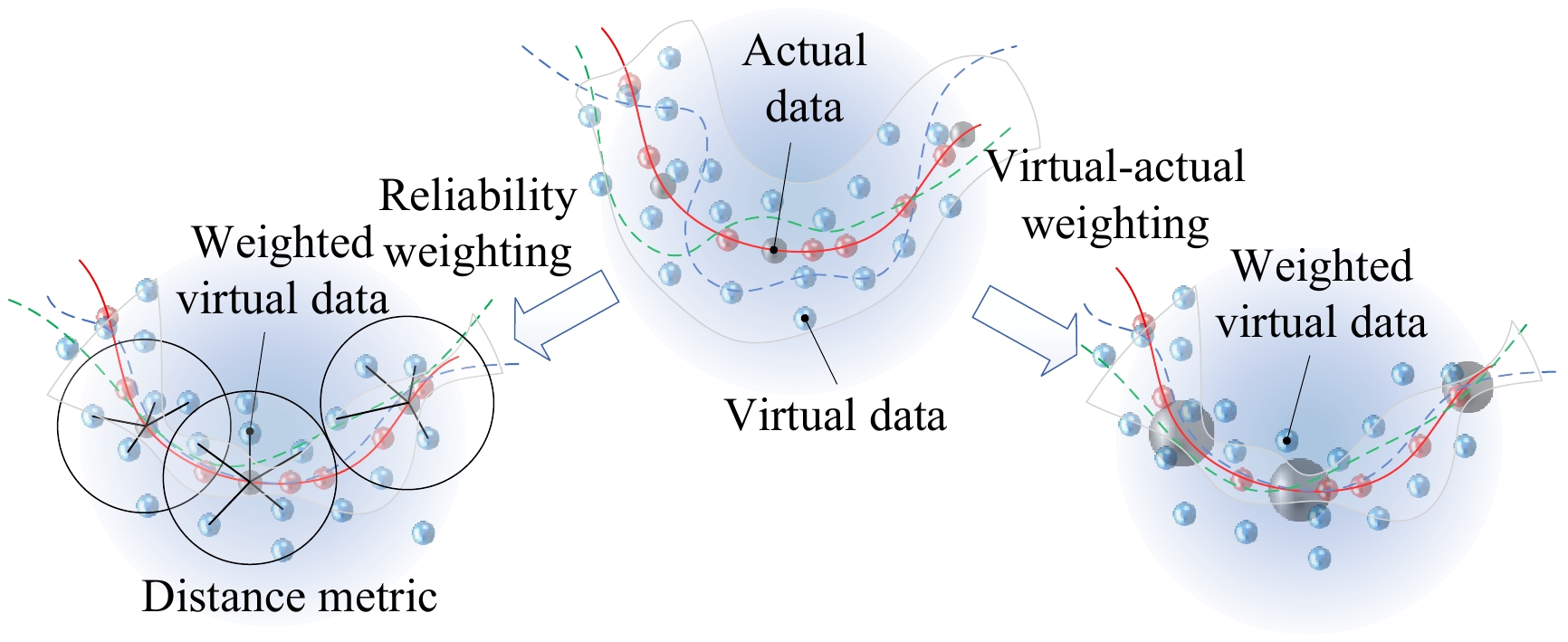
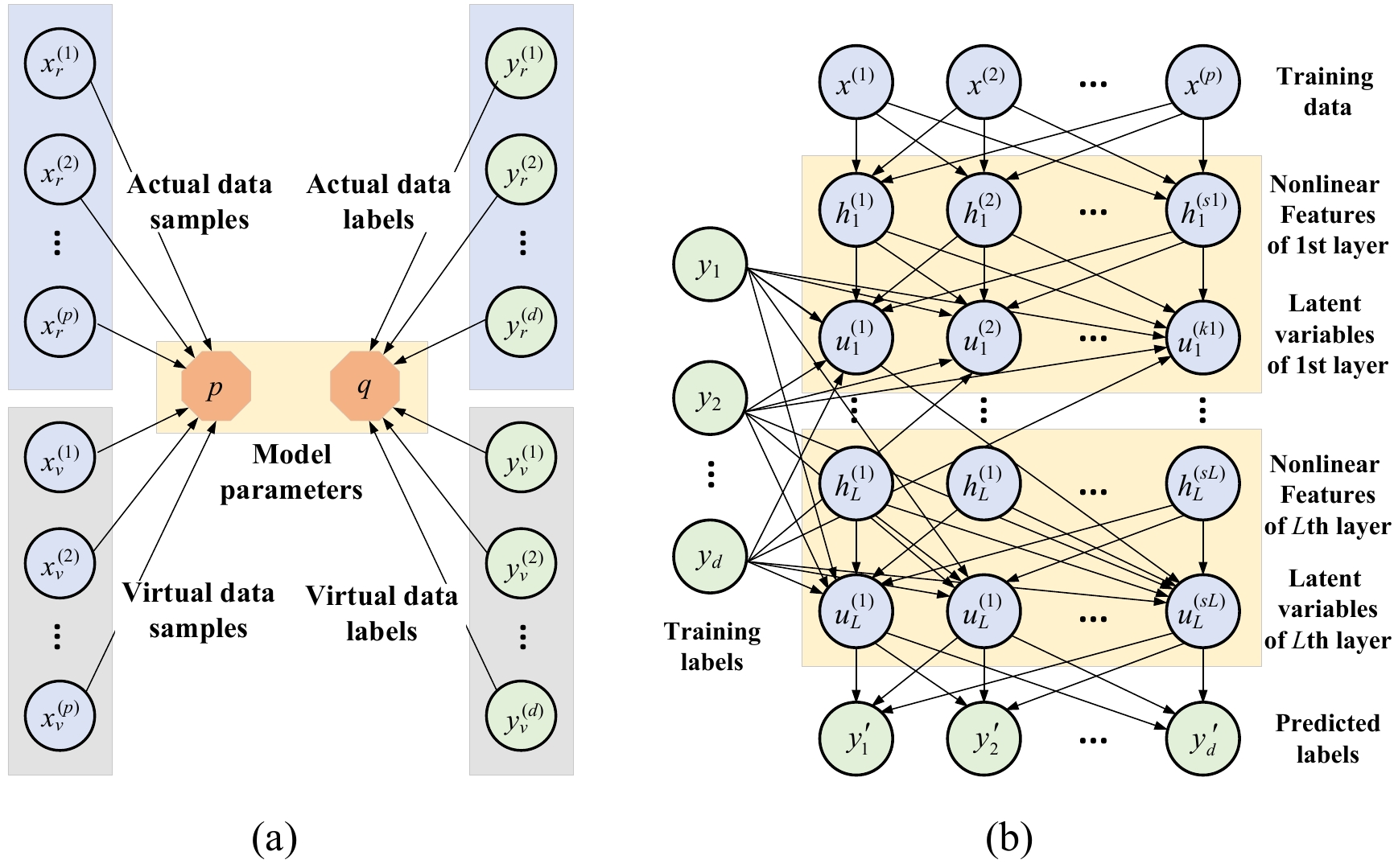
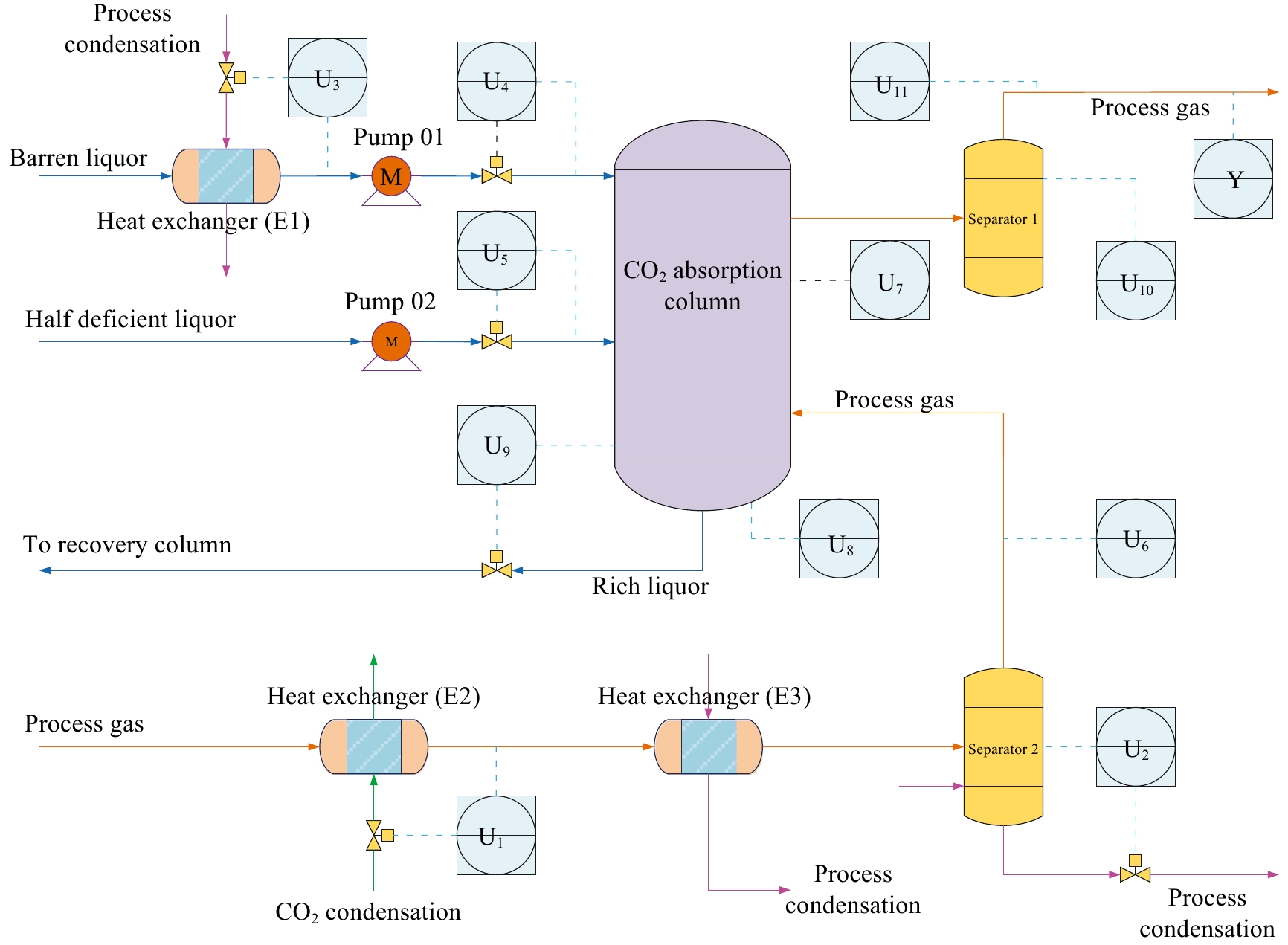
The curse of dimensionality refers to the problem of increased sparsity and computational complexity when dealing with high-dimensional data. In recent years, the types and variables of industrial data have increased significantly, making data-driven models more challenging to develop. To address this problem, data augmentation technology has been introduced as an effective tool to solve the sparsity problem of high-dimensional industrial data. This paper systematically explores and discusses the necessity, feasibility, and effectiveness of augmented industrial data-driven modeling in the context of the curse of dimensionality and virtual big data. Then, the process of data augmentation modeling is analyzed, and the concept of data boosting augmentation is proposed. The data boosting augmentation involves designing the reliability weight and actual-virtual weight functions, and developing a double weighted partial least squares model to optimize the three stages of data generation, data fusion, and modeling. This approach significantly improves the interpretability, effectiveness, and practicality of data augmentation in the industrial modeling. Finally, the proposed method is verified using practical examples of fault diagnosis systems and virtual measurement systems in the industry. The results demonstrate the effectiveness of the proposed approach in improving the accuracy and robustness of data-driven models, making them more suitable for real-world industrial applications.
X. Y. Jiang, X. Y. Kong, and Z. Q. Ge, “Augmented industrial data-driven modeling under the curse of dimensionality,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 6, pp. 1445–1461, Jun. 2023. doi: 10.1109/JAS.2023.123396.












 E-mail Alert
E-mail Alert