2023, 10(5): 1105-1121.
doi: 10.1109/JAS.2023.123450
Abstract:
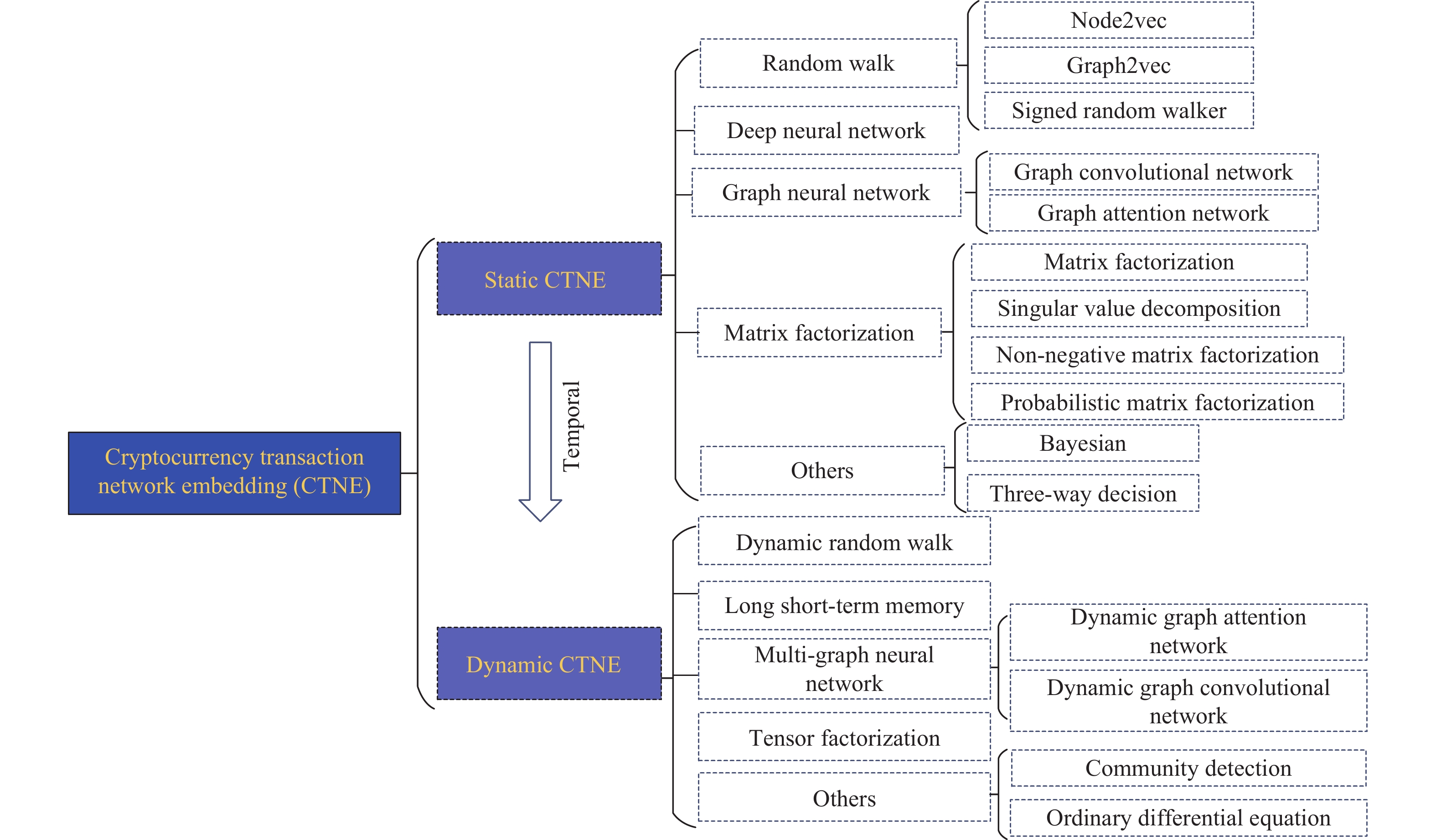
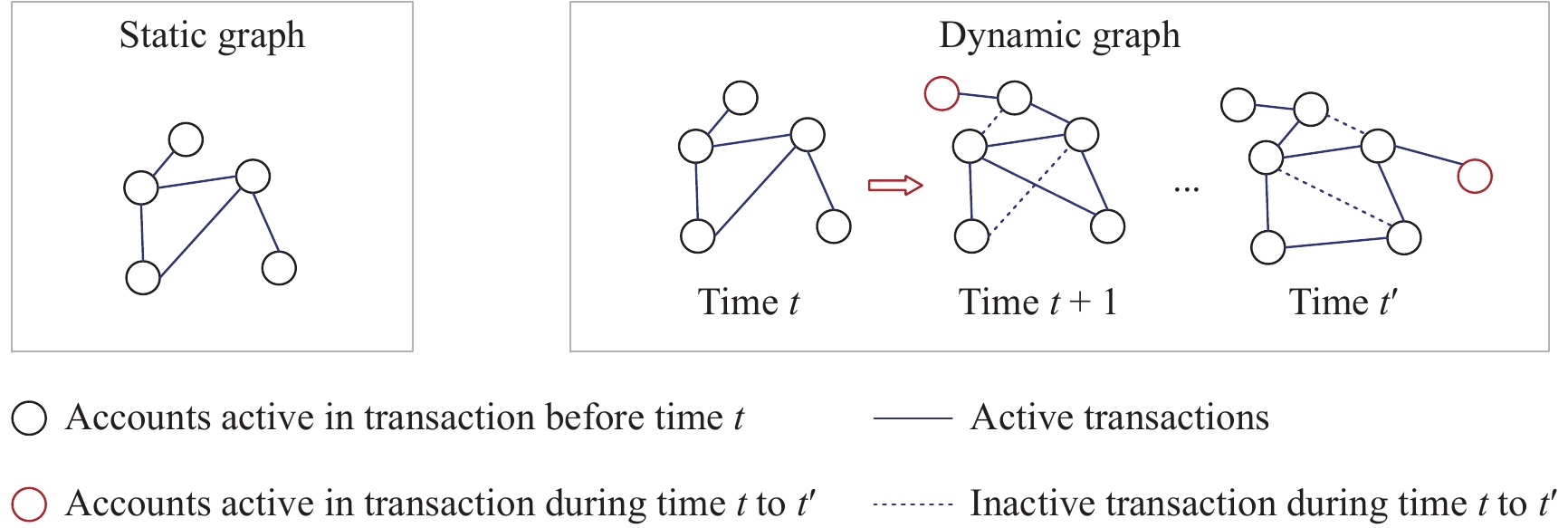
Cryptocurrency, as a typical application scene of blockchain, has attracted broad interests from both industrial and academic communities. With its rapid development, the cryptocurrency transaction network embedding (CTNE) has become a hot topic. It embeds transaction nodes into low-dimensional feature space while effectively maintaining a network structure, thereby discovering desired patterns demonstrating involved users’ normal and abnormal behaviors. Based on a wide investigation into the state-of-the-art CTNE, this survey has made the following efforts: 1) categorizing recent progress of CTNE methods, 2) summarizing the publicly available cryptocurrency transaction network datasets, 3) evaluating several widely-adopted methods to show their performance in several typical evaluation protocols, and 4) discussing the future trends of CTNE. By doing so, it strives to provide a systematic and comprehensive overview of existing CTNE methods from static to dynamic perspectives, thereby promoting further research into this emerging and important field.
Y. Zhou, X. Luo, and M. C. Zhou, “Cryptocurrency transaction network embedding from static and dynamic perspectives: An overview,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1105–1121, May 2023. doi: 10.1109/JAS.2023.123450.












 E-mail Alert
E-mail Alert