A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 5
Volume 10
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | X. Ge, Q.-L. Han, Q. Wu, and X.-M. Zhang, “Resilient and safe platooning control of connected automated vehicles against intermittent denial-of-service attacks,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1234–1251, May 2023. doi: 10.1109/JAS.2022.105845

|
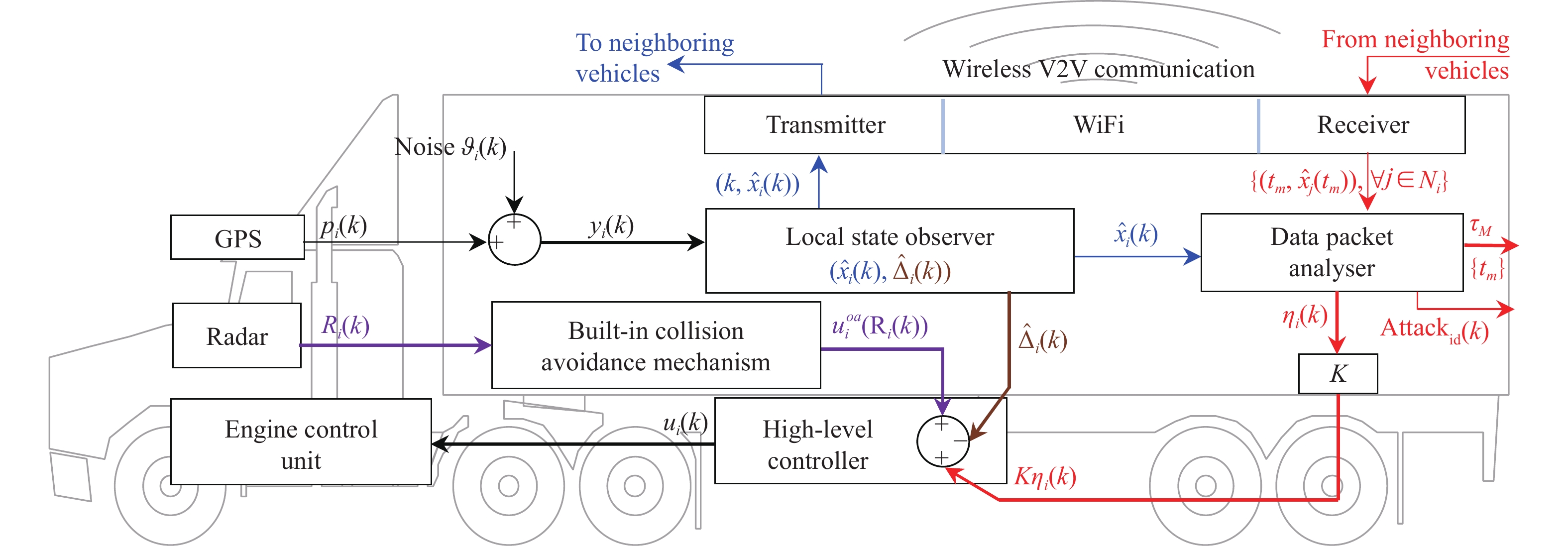
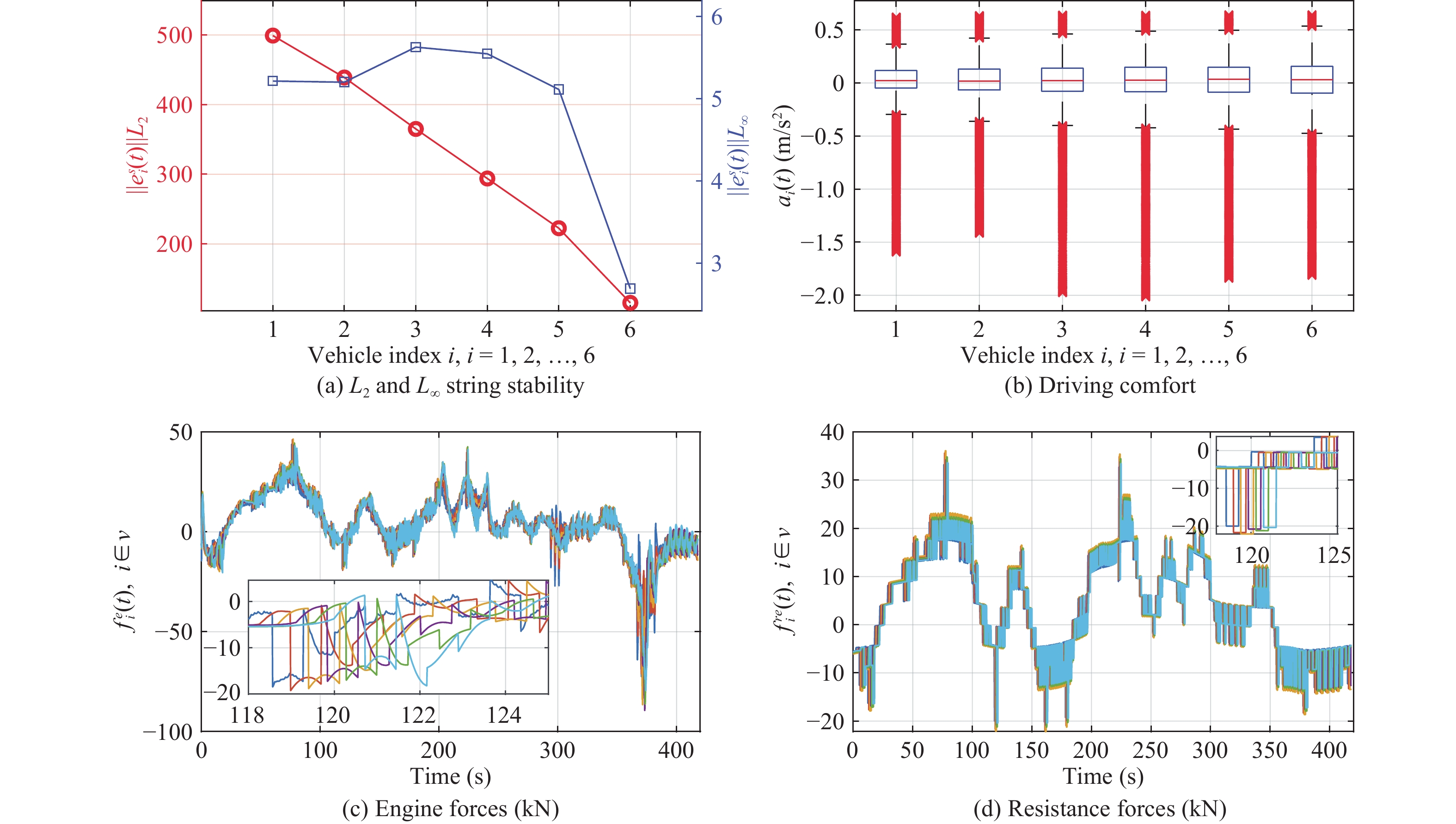
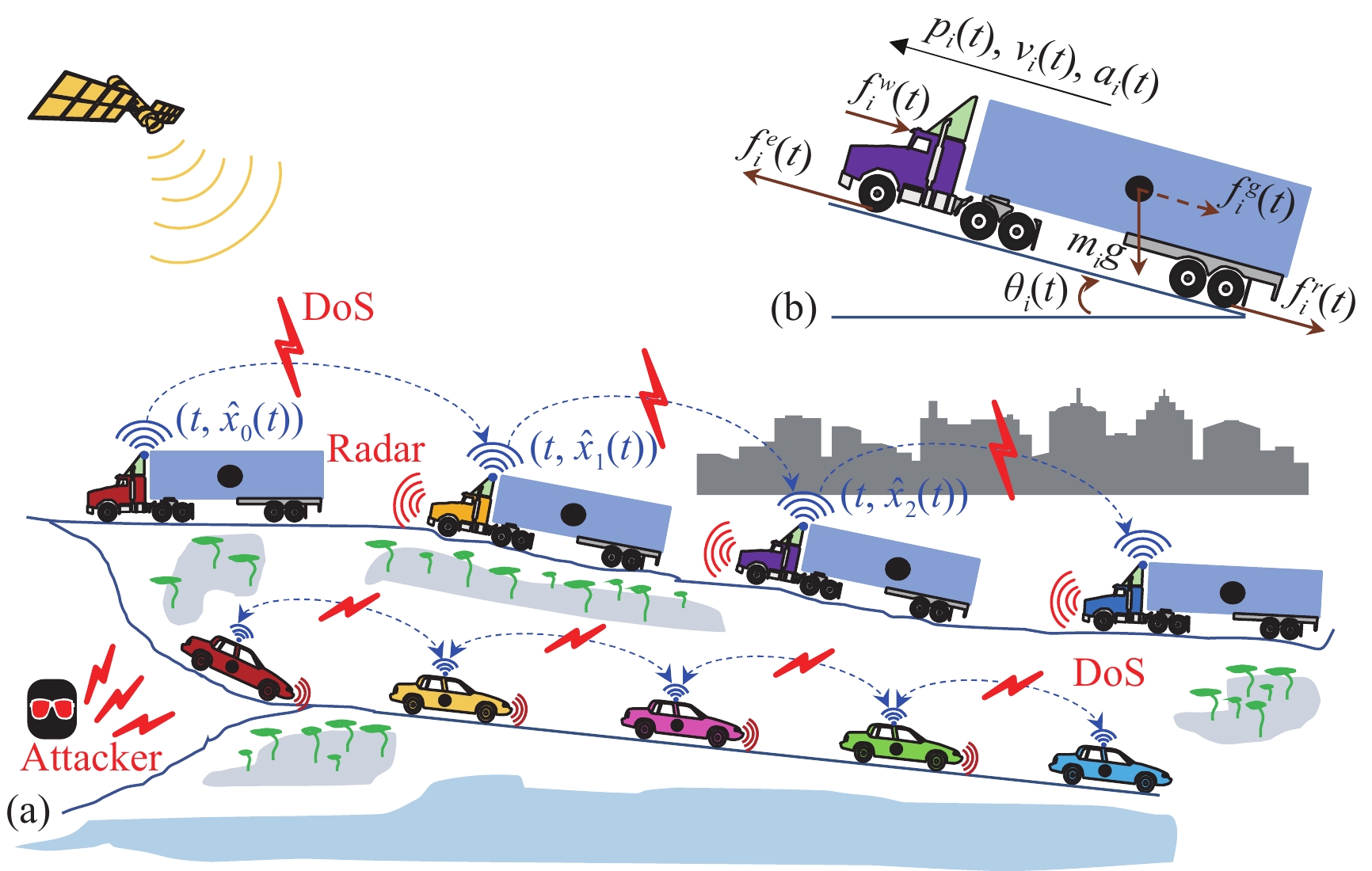
Connected automated vehicles (CAVs) serve as a promising enabler for future intelligent transportation systems because of their capabilities in improving traffic efficiency and driving safety, and reducing fuel consumption and vehicle emissions. A fundamental issue in CAVs is platooning control that empowers a convoy of CAVs to be cooperatively maneuvered with desired longitudinal spacings and identical velocities on roads. This paper addresses the issue of resilient and safe platooning control of CAVs subject to intermittent denial-of-service (DoS) attacks that disrupt vehicle-to-vehicle communications. First, a heterogeneous and uncertain vehicle longitudinal dynamic model is presented to accommodate a variety of uncertainties, including diverse vehicle masses and engine inertial delays, unknown and nonlinear resistance forces, and a dynamic platoon leader. Then, a resilient and safe distributed longitudinal platooning control law is constructed with an aim to preserve simultaneous individual vehicle stability, attack resilience, platoon safety and scalability. Furthermore, a numerically efficient offline design algorithm for determining the desired platoon control law is developed, under which the platoon resilience against DoS attacks can be maximized but the anticipated stability, safety and scalability requirements remain preserved. Finally, extensive numerical experiments are provided to substantiate the efficacy of the proposed platooning method.

| [1] |
X.-Y. Lu and S. Shladover, “Truck CACC system design and DSRC messages,” FHWA Explor. Adv. Res. Program Cooperat. Agreement, Task 2.1-Design CACC Control Syst. Trucks, Pleasanton, USA, Res. Rep. DTFH61-13-H00012, 2018.
|
| [2] |
S. Tsugawa, “Results and issues of an automated truck platoon within the energy ITS project,” in Proc. IEEE Intell. Vehicles Symp., Dearborn, USA, Jun. 2014, pp. 642–647.
|
| [3] |
S. Kato, S. Tsugawa, K. Tokuda, T. Matsui, and H. Fujii, “Vehicle control algorithms for cooperative driving with automated vehicles and intervehicle communications,” IEEE Trans. Intell. Transp. Syst., vol. 3, no. 3, pp. 155–161, Sept. 2002. doi: 10.1109/TITS.2002.802929
|
| [4] |
E. Chan, “SARTRE automated platooning vehicles,” in Towards Innov. Freight Logistics. Hoboken, USA: Wiley, 2016, pp. 137–150.
|
| [5] |
J. Ploeg, S. Shladover, H. Nijmeijer, and N. van deWouw, “Introduction to the special issue on the 2011 grand cooperative driving challenge,” IEEE Trans. Intell. Transp. Syst., vol. 13, no. 3, pp. 989–993, Sept. 2012. doi: 10.1109/TITS.2012.2210636
|
| [6] |
C. Englund, L. Chen, J. Ploeg, E. Semsar-Kazerooni, A. Voronov, H. Bengtsson, and J. Didoff, “The grand cooperative driving challenge 2016: Boosting the introduction of cooperative automated vehicles,” IEEE Wireless Commun., vol. 23, no. 4, pp. 146–152, Aug. 2016. doi: 10.1109/MWC.2016.7553038
|
| [7] |
T. Ersal, I. Kolmanovsky, N. Masoud, N. Ozay, J. Scruggs, R. Vasudevan, and G. Orosz, “Connected and automated road vehicles: State of the art and future challenges,” Veh. Syst. Dyn., vol. 58, no. 5, pp. 672–704, May 2020. doi: 10.1080/00423114.2020.1741652
|
| [8] |
F.-Y. Wang, N.-N. Zheng, D. Cao, C. Martinez, L. Li, and T. Liu, “Parallel driving in CPSS: A unified approach for transport automation and vehicle intelligence,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 4, pp. 577–587, Oct. 2017. doi: 10.1109/JAS.2017.7510598
|
| [9] |
J. Zhang and K. Letaief, “Mobile edge intelligence and computing for the Internet of vehicles,” Proc. IEEE, vol. 108, no. 2, pp. 246–261, Feb. 2020. doi: 10.1109/JPROC.2019.2947490
|
| [10] |
Y. Ma, Z. Wang, H. Yang, and L. Yang, “Artificial intelligence applications in the development of autonomous vehicles: A survey,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 315–329, Mar. 2020. doi: 10.1109/JAS.2020.1003021
|
| [11] |
H. Yu, R. Jiang, Z. He, Z. Zheng, L. Li, R. Liu, and X. Chen, “Automated vehicle-involved traffic flow studies: A survey of assumptions, models, speculations, and perspectives,” Transp. Res. Part C: Emerg. Technol., vol. 127, p. 103101, Jun. 2021.
|
| [12] |
C. Zu, C. Yang, J. Wang, W. Gao, D. Cao, and F.-Y. Wang, “Simulation and field testing of multiple vehicles collision avoidance algorithms,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1045–1063, Jul. 2020. doi: 10.1109/JAS.2020.1003246
|
| [13] |
M. Fanti, A. Mangini, A. Favenza, and G. Difilippo, “An eco-route planner for heavy duty vehicles,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 1, pp. 37–51, Jan. 2021. doi: 10.1109/JAS.2020.1003456
|
| [14] |
W. Xu, H. Zhou, N. Cheng, F. Lyu, W. Shi, J. Chen, and X. Shen, “Internet of vehicles in big data era,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 19–35, Jan. 2018. doi: 10.1109/JAS.2017.7510736
|
| [15] |
H. Zhou, W. Xu, J. Chen, and W. Wang, “Evolutionary V2X technologies toward the Internet of vehicles: Challenges and opportunities,” Proc. IEEE, vol. 108, no. 2, pp. 308–323, Feb. 2020. doi: 10.1109/JPROC.2019.2961937
|
| [16] |
X. Ge, Q.-L. Han, L. Ding, Y.-L. Wang, and X.-M. Zhang, “Dynamic event-triggered distributed coordination control and its applications: A survey of trends and techniques,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 50, no. 9, pp. 3112–3125, Sept. 2020. doi: 10.1109/TSMC.2020.3010825
|
| [17] |
S. Parkinson, P. Ward, K. Wilson, and J. Miller, “Cyber threats facing autonomous and connected vehicles: Future challenges,” IEEE Trans. Intell. Transp. Syst., vol. 18, no. 11, pp. 2898–2915, Nov. 2017. doi: 10.1109/TITS.2017.2665968
|
| [18] |
M. Sun, A. Al-Hashimi, M. Li, and R. Gerdes, “Impacts of constrained sensing and communication based attacks on vehicular platoons,” IEEE Trans. Vech. Technol., vol. 69, no. 5, pp. 4773–4787, May 2020. doi: 10.1109/TVT.2020.2981003
|
| [19] |
S. Xiao, X. Ge, Q.-L. Han, and Y. Zhang, “Secure and collision-free multi-platoon control of automated vehicles under data falsification attacks,” Automatica, vol. 145, p. 110531, Nov. 2022.
|
| [20] |
S. Ucar, S. Ergen, and O. Ozkasap, “IEEE 802.11p and visible light hybrid communication based secure autonomous platoon,” IEEE Trans. Vech. Technol., vol. 67, no. 9, pp. 8667–8681, Sept. 2018. doi: 10.1109/TVT.2018.2840846
|
| [21] |
F. van Wyk, Y. Wang, A. Khojandi, and N. Masoud, “Real-time sensor anomaly detection and identification in automated vehicles,” IEEE Trans. Intell. Transp. Syst., vol. 21, no. 3, pp. 1264–1276, Mar. 2020. doi: 10.1109/TITS.2019.2906038
|
| [22] |
Y. Wang, N. Masoud, and A. Khojandi, “Real-time sensor anomaly detection and recovery in connected automated vehicle sensors,” IEEE Trans. Intell. Transp. Syst., vol. 22, no. 3, pp. 1411–1421, Mar. 2021. doi: 10.1109/TITS.2020.2970295
|
| [23] |
Z. Biron, S. Dey, and Pisu, “Real-time detection and estimation of denial of service attack in connected vehicle systems,” IEEE Trans. Intell. Transp. Syst., vol. 19, no. 12, pp. 3893–3902, Dec. 2018. doi: 10.1109/TITS.2018.2791484
|
| [24] |
E. Mousavinejad, F. Yang, Q.-L. Han, X. Ge, and L. Vlacic, “Distributed cyber attacks detection and recovery mechanism for vehicle platooning,” IEEE Trans. Intell. Transp. Syst., vol. 21, no. 9, pp. 3821–3834, Sept. 2020. doi: 10.1109/TITS.2019.2934481
|
| [25] |
A. Alipour-Fanid, M. Dabaghchian, and K. Zeng, “Impact of jamming attacks on vehicular cooperative adaptive cruise control systems,” IEEE Trans. Vech. Technol., vol. 69, no. 11, pp. 12679–12693, Nov. 2020. doi: 10.1109/TVT.2020.3030251
|
| [26] |
A. Petrillo, A. Pescapé, and S. Santini, “A secure adaptive control for cooperative driving of autonomous connected vehicles in the presence of heterogeneous communication delays and cyberattacks,” IEEE Trans. Cybern., vol. 51, no. 3, pp. 1134–1149, Mar. 2021. doi: 10.1109/TCYB.2019.2962601
|
| [27] |
D. Zhang, Y.-P. Shen, S.-Q. Zhou, X.-W. Dong, and L. Yu, “Distributed secure platoon control of connected vehicles subject to DoS attack: Theory and application,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 51, no. 11, pp. 7269–7278, Nov. 2021. doi: 10.1109/TSMC.2020.2968606
|
| [28] |
Z. Li, B. Hu, and Z. Yang, “Co-design of distributed event-triggered controller for string stability of vehicle platooning under periodic jamming attacks,” IEEE Trans. Vech. Technol., vol. 70, no. 12, pp. 13115–13128, Dec. 2021. doi: 10.1109/TVT.2021.3117275
|
| [29] |
Y. Harfouch, S. Yuan, and S. Baldi, “An adaptive switched control approach to heterogeneous platooning with intervehicle communication losses,” IEEE Trans. Control Netw. Syst., vol. 5, no. 3, pp. 1434–1444, Sept. 2018. doi: 10.1109/TCNS.2017.2718359
|
| [30] |
G. Guo, J. Kang, H. Lei, and D. Li, “Finite-time stabilization of a collection of connected vehicles subject to communication interruptions,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 8, pp. 10627–10635, Aug. 2022. doi: 10.1109/TITS.2021.3095147
|
| [31] |
S. Xiao, X. Ge, Q.-L. Han, and Y. Zhang, “Secure distributed adaptive platooning control of automated vehicles over vehicular ad-hoc networks under denial-of-service attacks,” IEEE Trans. Cybern., vol. 52, no. 11, pp. 12003–12015, Nov. 2022. doi: 10.1109/TCYB.2021.3074318
|
| [32] |
R. Merco, F. Ferrante, and P. Pisu, “A hybrid controller for DOS-resilient string-stable vehicle platoons,” IEEE Trans. Intell. Transp. Syst., vol. 22, no. 3, pp. 1697–1707, Mar. 2021. doi: 10.1109/TITS.2020.2975815
|
| [33] |
X. Ge, S. Xiao, Q.-L. Han, X.-M. Zhang, and D. Ding, “Dynamic event-triggered scheduling and platooning control co-design for automated vehicles over vehicular ad-hoc networks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 31–46, Jan. 2022. doi: 10.1109/JAS.2021.1004060
|
| [34] |
X. Ge, Q.-L. Han, J. Wang, and X.-M. Zhang, “A scalable adaptive approach to multi-vehicle formation control with obstacle avoidance,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 990–1004, Jun. 2022.
|
| [35] |
J. Ploeg, D. Shukla, N. van de Wouw, and H. Nijmeijer, “Controller synthesis for string stability of vehicle platoons,” IEEE Trans. Intell. Transp. Syst., vol. 15, no. 2, pp. 854–865, Feb. 2014. doi: 10.1109/TITS.2013.2291493
|
| [36] |
S. Stüdli, M. Seron, and R. Middleton, “From vehicular platoons to general networked systems: String stability and related concepts,” Annu. Rev. Control, vol. 44, pp. 152–172, Oct. 2017.
|
| [37] |
S. Feng, Y. Zhang, S. Li, Z. Cao, H. Liu, and L. Li, “String stability for vehicular platoon control: Definitions and analysis methods,” Annu. Rev. Control, vol. 47, pp. 81–97, Jun. 2019. doi: 10.1016/j.arcontrol.2019.03.001
|
| [38] |
X. Ge, Q.-L. Han, J. Wang, and X.-M. Zhang, “Scalable and resilient platooning control of cooperative automated vehicles,” IEEE Trans. Veh. Technol., vol. 71, no. 4, pp. 3595–3608, Apr. 2022. doi: 10.1109/TVT.2022.3147371
|
| [39] |
K. Gu, V. Kharitonov, and J. Chen, Stability of Time-Delay Systems. Boston, USA: Birkhäuser, 2003.
|
| [40] |
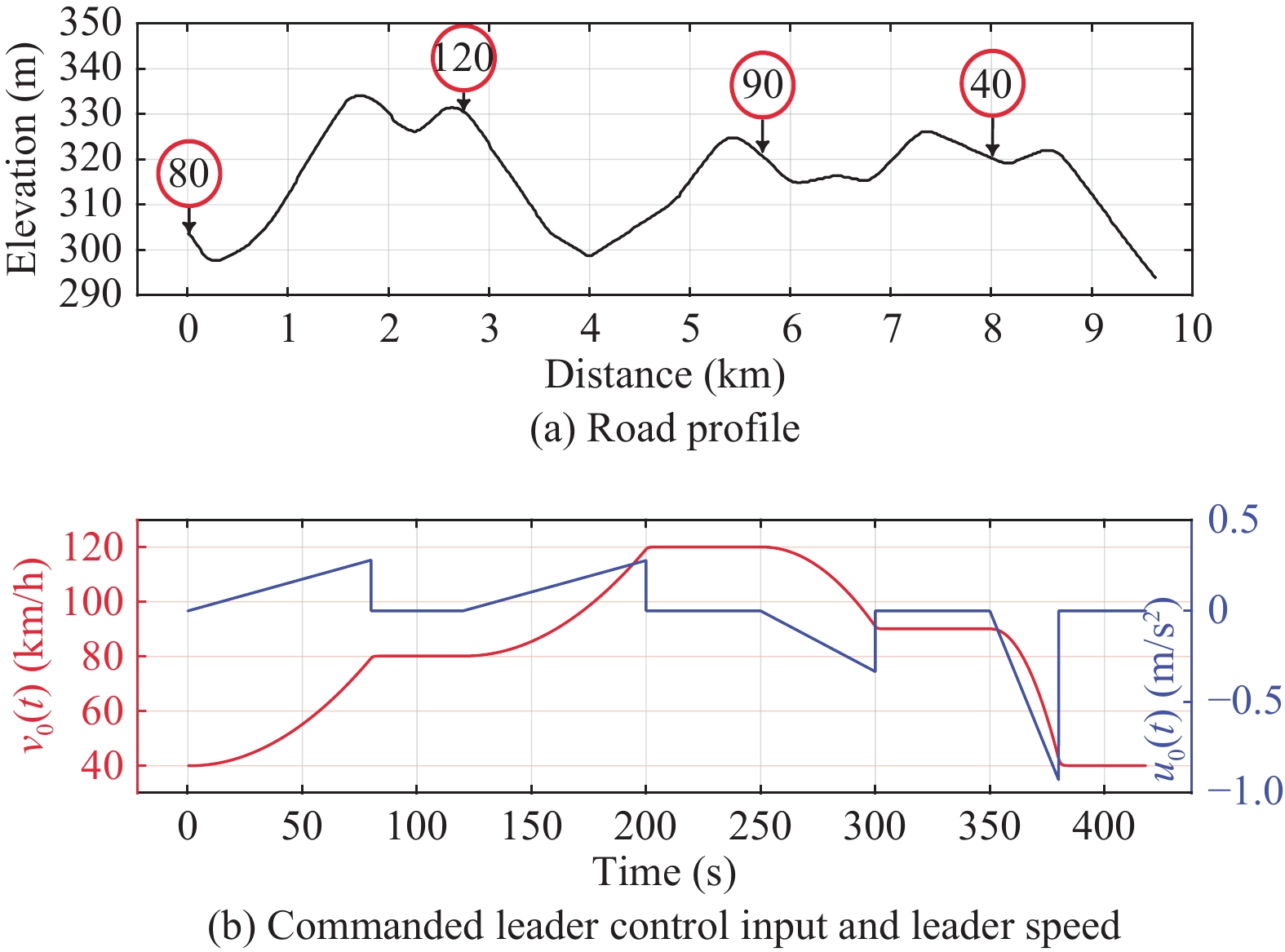
E. Wood, E. Burton, A. Duran, and J. Gonder, “Appending high-resolution elevation data to GPS speed traces for vehicle energy modeling and simulation,” National Renewable Energy Laboratory, Golden, USA, Technical Report NREL/TP-5400-61109, 2014,
|
| [41] |
D. Swaroop and K. Hedrick, “String stability of interconnected systems,” IEEE Trans. Autom. Control, vol. 41, no. 3, pp. 349–357, Mar. 1996. doi: 10.1109/9.486636
|
| [42] |
J. Monteil, M. Bouroche, and D. Leith, “
|
| [43] |
E. van Nunen, J. Reinders, E. Semsar-Kazerooni, and N. van de Wouw, “String stable model predictive cooperative adaptive cruise control for heterogeneous platoons,” IEEE Trans. Intell. Veh., vol. 4, no. 2, pp. 186–196, Jun. 2019. doi: 10.1109/TIV.2019.2904418
|
| [44] |
Q. Deng, “A general simulation framework for modeling and analysis of heavy-duty vehicle platooning,” IEEE Trans. Intell. Transp. Syst., vol. 17, no. 11, pp. 3252–3262, Nov. 2016. doi: 10.1109/TITS.2016.2548502
|
| [45] |
X. Ge, Q.-L. Han, X.-M. Zhang, L. Ding, and F. Yang, “Distributed event-triggered estimation over sensor networks: A survey,” IEEE Trans. Cybern., vol. 50, no. 3, pp. 1306–1320, Mar. 2020. doi: 10.1109/TCYB.2019.2917179
|
| [46] |
H. Geng, H. Liu, L. Ma, and X. Yi, “Multi-sensor filtering fusion meets censored measurements under a constrained network environment: Advances, challenges and prospects,” Int. J. Syst. Sci., vol. 52, no. 16, pp. 3410–3436, Dec. 2021. doi: 10.1080/00207721.2021.2005178
|
| [47] |
J. Sarangapani, Neural Network Control of Nonlinear Discrete-Time Systems. Boca Raton, USA: CRC Press, 2006.
|
| [48] |
A. Seuret and E. Fridman, “Wirtinger-like Lyapunov-Krasovskii functionals for discrete-time delay systems,” IMA J. Math. Control Inf., vol. 35, no. 3, pp. 861–876, Sept. 2018. doi: 10.1093/imamci/dnx002
|
Figures(10)








 DownLoad:
DownLoad: