A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 5
Volume 10
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | B. Shen, X. L. Wang, and L. Zou, “Maximum correntropy Kalman filtering for non-Gaussian systems with state saturations and stochastic nonlinearities,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1223–1233, May 2023. doi: 10.1109/JAS.2023.123195

|
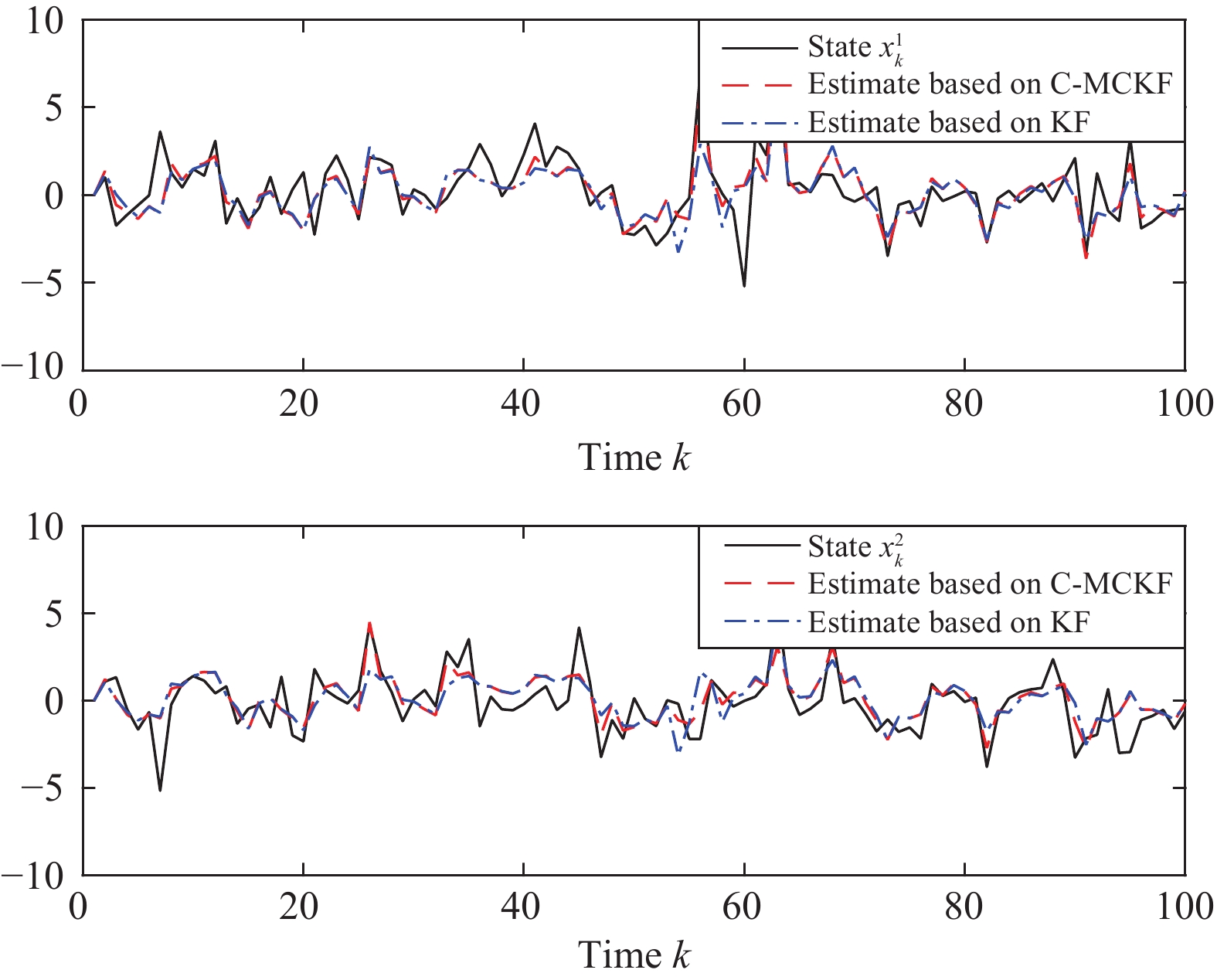
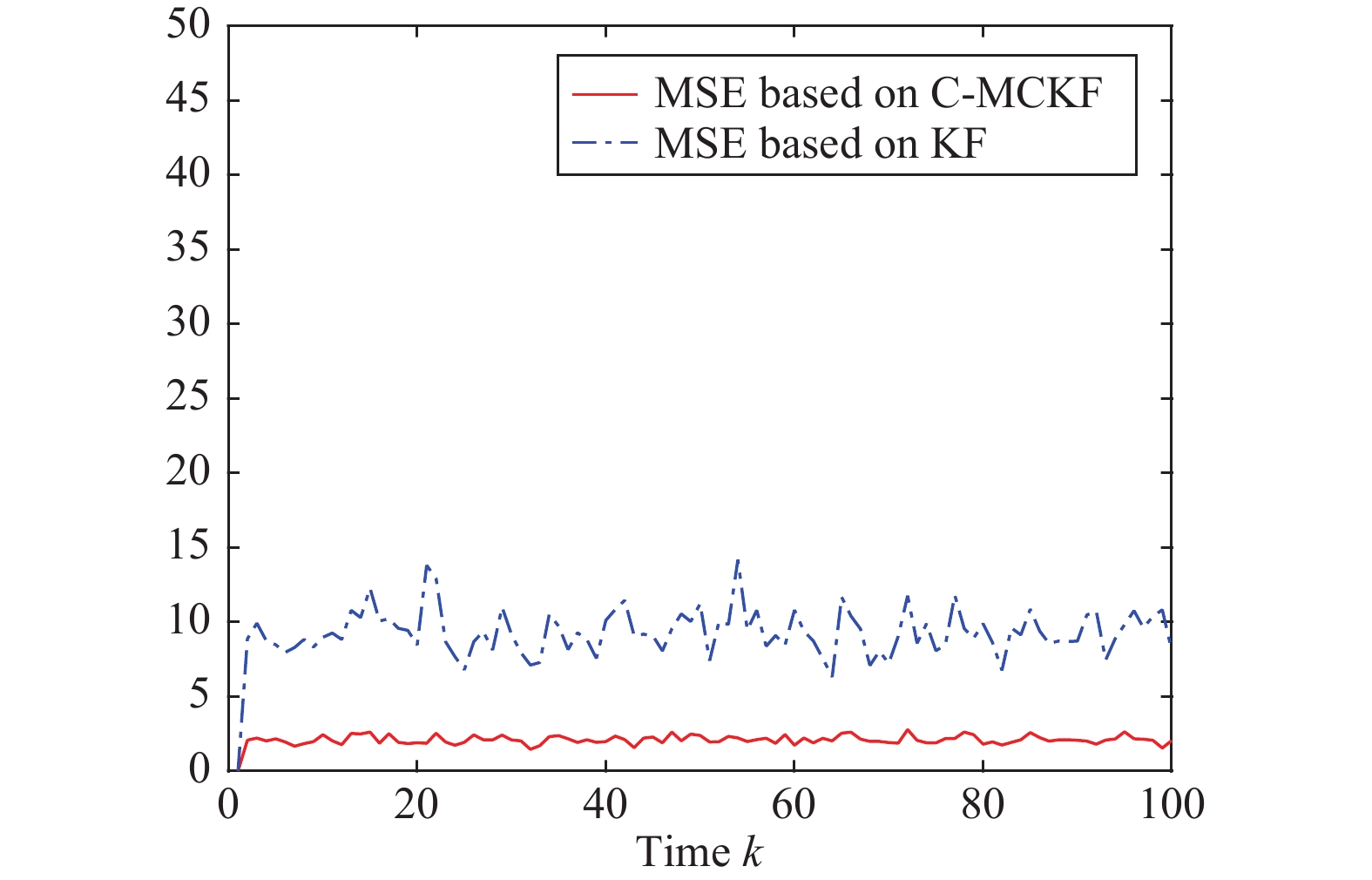
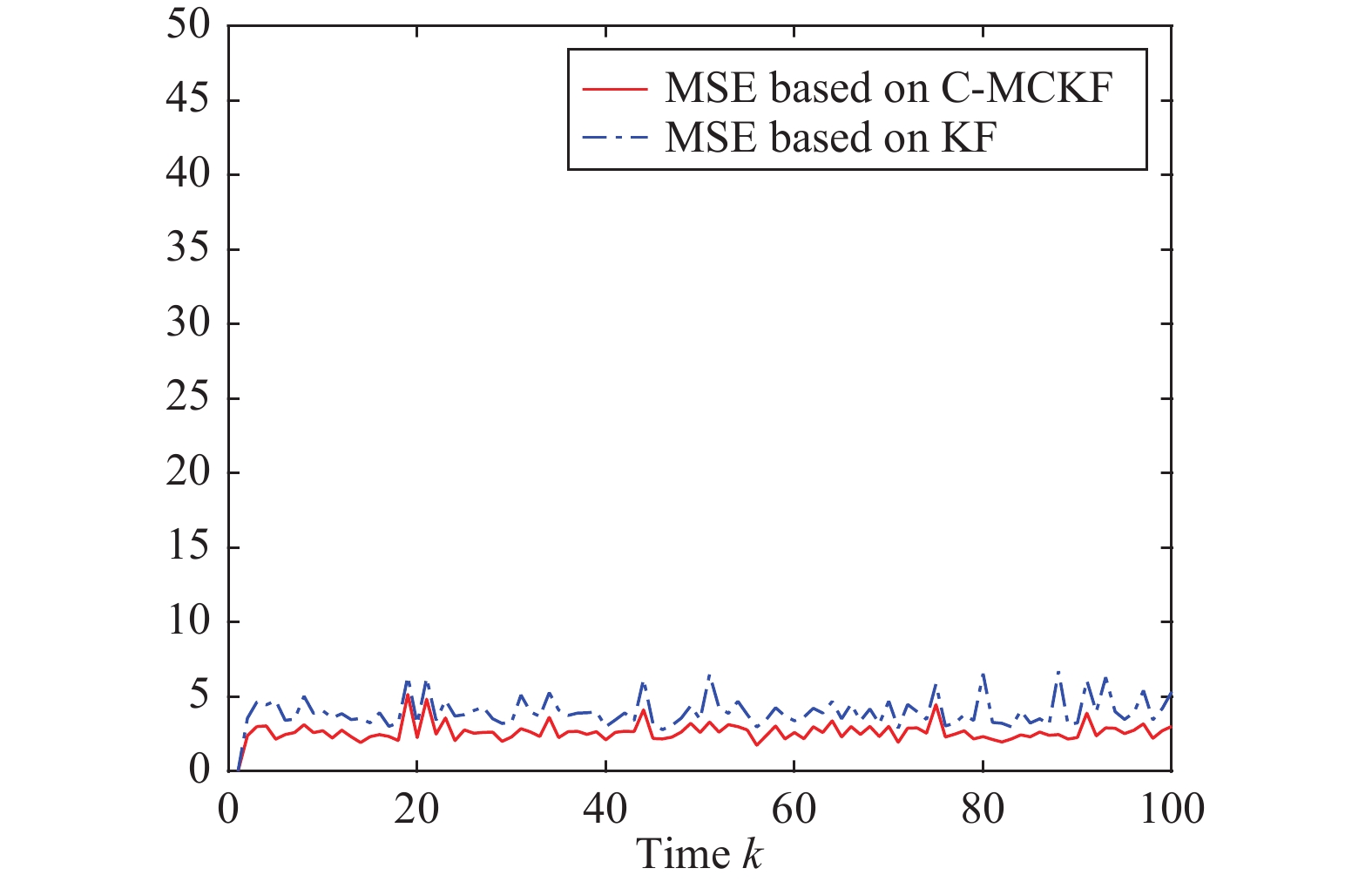
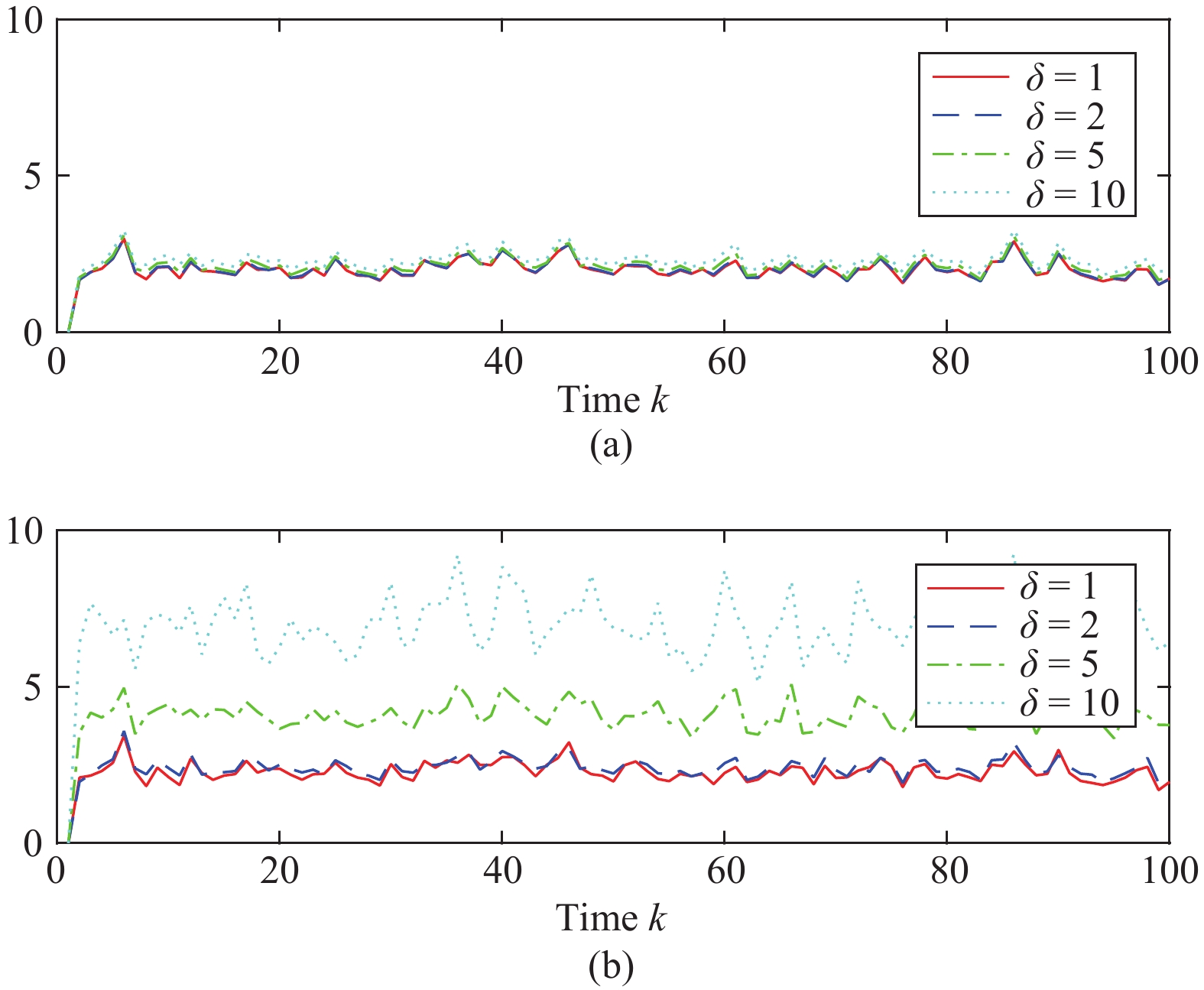
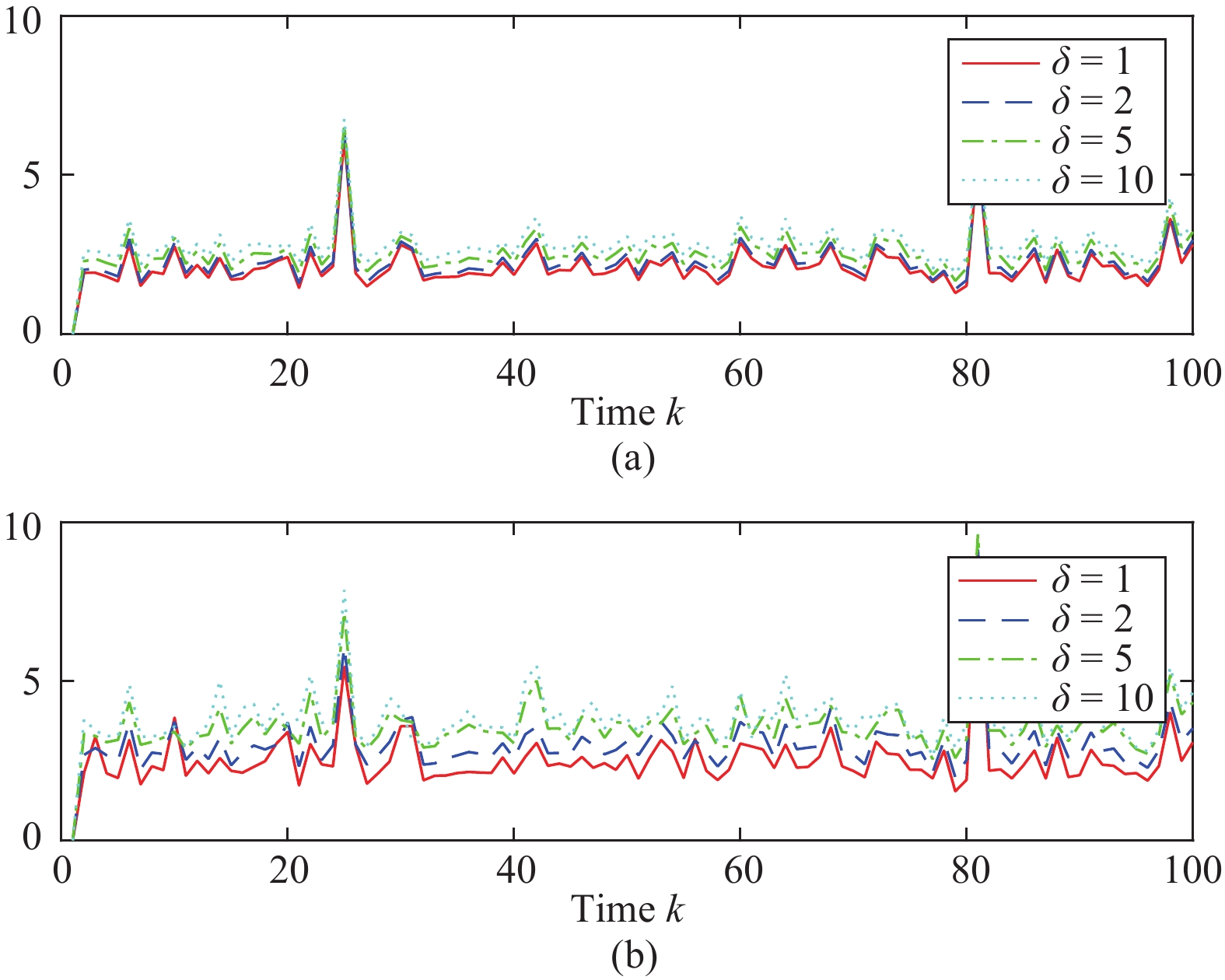
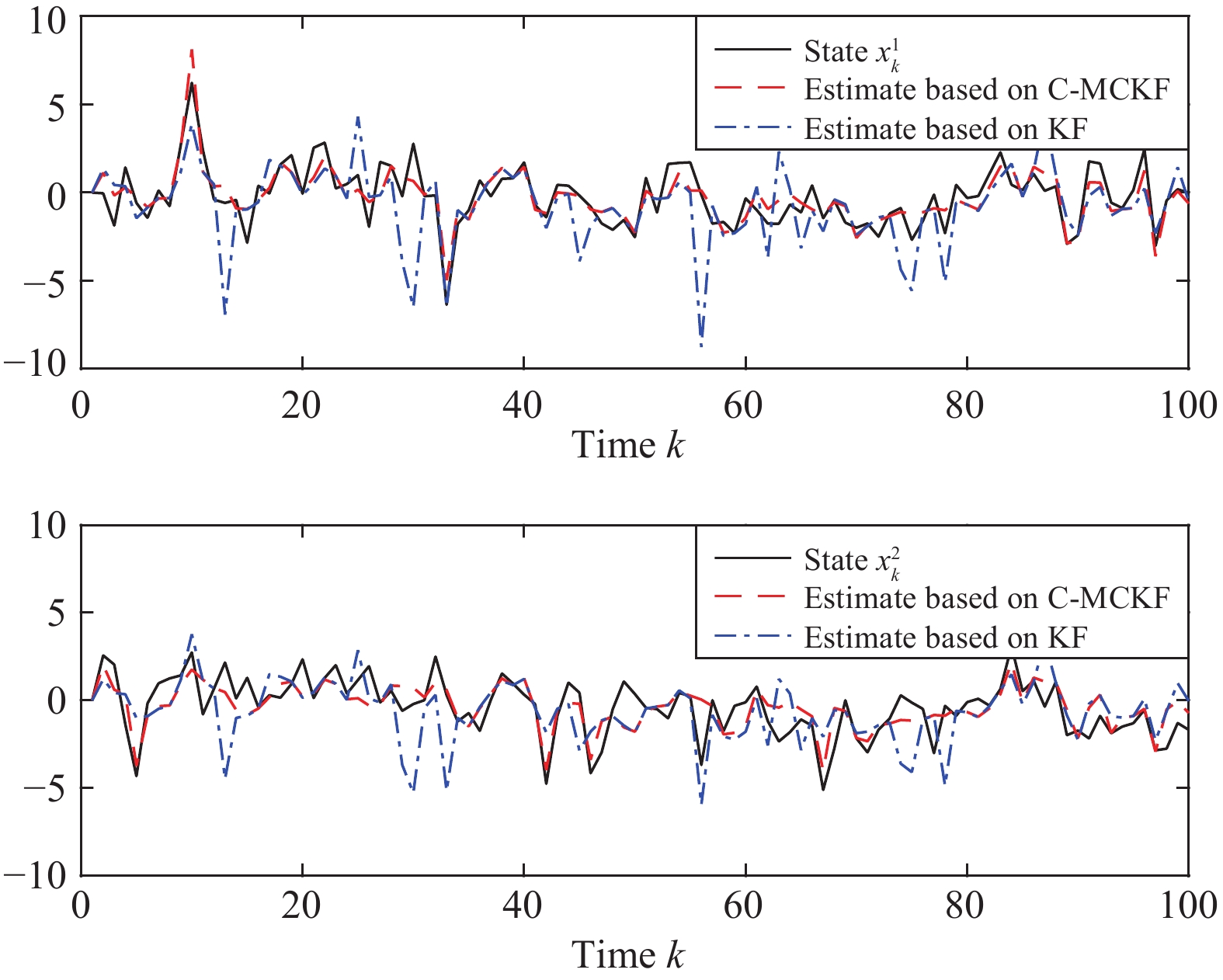
This paper tackles the maximum correntropy Kalman filtering problem for discrete time-varying non-Gaussian systems subject to state saturations and stochastic nonlinearities. The stochastic nonlinearities, which take the form of state-multiplicative noises, are introduced in systems to describe the phenomenon of nonlinear disturbances. To resist non-Gaussian noises, we consider a new performance index called maximum correntropy criterion (MCC) which describes the similarity between two stochastic variables. To enhance the “robustness” of the kernel parameter selection on the resultant filtering performance, the Cauchy kernel function is adopted to calculate the corresponding correntropy. The goal of this paper is to design a Kalman-type filter for the underlying systems via maximizing the correntropy between the system state and its estimate. By taking advantage of an upper bound on the one-step prediction error covariance, a modified MCC-based performance index is constructed. Subsequently, with the assistance of a fixed-point theorem, the filter gain is obtained by maximizing the proposed cost function. In addition, a sufficient condition is deduced to ensure the uniqueness of the fixed point. Finally, the validity of the filtering method is tested by simulating a numerical example.

| [1] |
Y. Chen and Z. Wang, “Local stabilization for discrete-time systems with distributed state delay and fast-varying input delay under actuator saturations,” IEEE Trans. Automatic Control, vol. 66, no. 3, pp. 1337–1344, Mar. 2021. doi: 10.1109/TAC.2020.2991013
|
| [2] |
D. Ding, Q.-L. Han, X. Ge, and J. Wang, “Secure state estimation and control of cyber-physical systems: A survey,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 51, no. 1, pp. 176–190, Jan. 2021. doi: 10.1109/TSMC.2020.3041121
|
| [3] |
J. Hu, C. Jia, H. Yu, and H. Liu, “Dynamic event-triggered state estimation for nonlinear coupled output complex networks subject to innovation constraints,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 941–944, May 2022. doi: 10.1109/JAS.2022.105581
|
| [4] |
B. Jiang, H. Dong, Y. Shen, and S. Mu, “Encoding-decoding-based recursive filtering for fractional-order systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 1103–1106, Jun. 2022. doi: 10.1109/JAS.2022.105644
|
| [5] |
J. Li, Z. Wang, H. Dong, and G. Ghinea, “Outlier-resistant remote state estimation for recurrent neural networks with mixed time-delays,” IEEE Trans. Neural Networks and Learning Systems, vol. 32, no. 5, pp. 2266–2273, May 2021. doi: 10.1109/TNNLS.2020.2991151
|
| [6] |
Q. Lu, Q.-L. Han, D. Peng, and Y. Choi, “Decision and event-based fixed-time consensus control for electromagnetic source localization,” IEEE Trans. Cybernetics, vol. 52, no. 4, pp. 2186–2199, Apr. 2022. doi: 10.1109/TCYB.2020.3005964
|
| [7] |
W. Qian, W. Xing, and S. Fei, “H∞ state estimation for neural networks with general activation function and mixed time-varying delays,” IEEE Trans. Neural Networks and Learning Systems, vol. 32, no. 9, pp. 3909–3918, Sept. 2021. doi: 10.1109/TNNLS.2020.3016120
|
| [8] |
H. Yang, H. Li, Y. Xia, and L. Li, “Distributed Kalman filtering over sensor networks with transmission delays,” IEEE Trans. Cybernetics, vol. 51, no. 11, pp. 5511–5521, Nov. 2021. doi: 10.1109/TCYB.2020.2980582
|
| [9] |
Y. Zhou and X. Wang, “Adaptive fuzzy command filtering control for nonlinear MIMO systems with full state constraints and unknown control direction,” Neurocomputing, vol. 493, pp. 474–485, Jul. 2022. doi: 10.1016/j.neucom.2021.12.091
|
| [10] |
I. Arasaratnam and S. Haykin, “Cubature Kalman filters,” IEEE Trans. Automatic Control, vol. 54, no. 6, pp. 1254–269, Jan. 2009. doi: 10.1109/TAC.2009.2019800
|
| [11] |
I. Arasaratnam, S. Haykin, and T. R. Hurd, “Cubature Kalman filtering for continuous-discrete systems: Theory and simulations,” IEEE Trans. Signal Processing, vol. 58, no. 10, pp. 4977–4993, Oct. 2010. doi: 10.1109/TSP.2010.2056923
|
| [12] |
K. K. Ahn and D. Q. Truong, “Online tuning fuzzy PID controller using robust extended Kalman filter,” Journal of Process Control, vol. 19, no. 6, pp. 1011–1023, Jun. 2009. doi: 10.1016/j.jprocont.2009.01.005
|
| [13] |
X. Wang and E. E. Yaz, “Second-order fault tolerant extended Kalman filter for discrete time nonlinear systems,” IEEE Trans. Automatic Control, vol. 64, no. 12, pp. 5086–5093, Dec. 2019. doi: 10.1109/TAC.2019.2908654
|
| [14] |
L. Li and Y. Xia, “Stochastic stability of the unscented Kalman filter with intermittent observations,” Automatica, vol. 48, no. 5, pp. 978–981, May 2012. doi: 10.1016/j.automatica.2012.02.014
|
| [15] |
J. Lin, M. Nassar, and B. L. Evans, “Impulsive noise mitigation in powerline communications using sparse Bayesian learning,” IEEE Journal on Selected Areas in Communications, vol. 31, no. 7, pp. 1172–1183, Jul. 2013. doi: 10.1109/JSAC.2013.130702
|
| [16] |
W. Ebeling, M. Y. Romanovsky, and I. M. Sokolov, “Velocity distributions and kinetic equations for plasmas including Lévy type power law tails,” Contributions to Plasma Physics, vol. 49, no. 10, pp. 704–712, Dec. 2009. doi: 10.1002/ctpp.200910081
|
| [17] |
T. Chen, L. Sun, K. V. Ling, and W. K. Ho, “Robust power system state estimation using t-distribution noise model,” IEEE System Journal, vol. 14, no. 1, pp. 771–781, Mar. 2020. doi: 10.1109/JSYST.2018.2890106
|
| [18] |
C. Liu, L. Yang, J. Tao, Y. Xu and T. Huang, “Set-membership filtering for complex networks with constraint communication channels,” Nerual Networks, vol. 152, pp. 479–486, Aug. 2022. doi: 10.1016/j.neunet.2022.05.009
|
| [19] |
Q. Liu, Z. Wang, Q.-L. Han, and C. Jiang, “Quadratic estimation for discrete time-varying non-Gaussian systems with multiplicative noises and quantization effects,” Automatica, vol. 113, pp. 1–9, Mar. 2020.
|
| [20] |
B. Chen, X. Liu, H. Zhao, and J. C. Principe, “Maximum correntropy Kalman filter,” Automatica, vol. 76, pp. 70–77, Feb. 2017. doi: 10.1016/j.automatica.2016.10.004
|
| [21] |
M. V. Kulikova, “Chandrasekhar-based maximum correntropy Kalman filtering with the adaptive kernel size selection,” IEEE Trans. Automatic Control, vol. 65, no. 2, pp. 741–748, Feb. 2020. doi: 10.1109/TAC.2019.2919341
|
| [22] |
X. Liu, H. Lyu, Z. Jiang, Ren, and B. Chen, “Linear and nonlinear regression-based maximum correntropy extended Kalman filtering,” IEEE Trans. Systems Man Cybernetics-Systems, vol. 51, no. 5, pp. 3093–3102, May 2021. doi: 10.1109/TSMC.2019.2917712
|
| [23] |
G. Wang, R. Xue, and J. Wang, “A distributed maximum correntropy Kalman filter,” Signal Processing, vol. 160, pp. 247–251, Jul. 2019. doi: 10.1016/j.sigpro.2019.02.030
|
| [24] |
H. Wang, W. Zhang, J. Zuo, and H. Wang, “Outlier-robust Kalman filters with mixture correntropy,” Journal of the Franklin Institute-Engineering and Applied Mathematics, vol. 357, no. 8, pp. 5058–5072, May 2020. doi: 10.1016/j.jfranklin.2020.03.042
|
| [25] |
W. Wang, C. K. Tse, and S. Wang, “Generalized correntropy sparse Gauss-Hermite quadrature filter for epidemic tracking on complex networks,” IEEE Trans. Systems Man Cybernetics-Systems, vol. 52, no. 5, pp. 2770–2778, 2022.
|
| [26] |
Q. Meng and X. Li, “Minimum Cauchy kernel loss based robust cubature Kalman filter and its low complexity cost version with application on INS/OD integrated navigation system,” IEEE Sensors Journal, vol. 22, no. 10, pp. 9534–9542, May 2022. doi: 10.1109/JSEN.2022.3154161
|
| [27] |
Y. Chen, K. Ma, and R. Dong, “Dynamic anti-windup design for linear systems with time-varying state delay and input saturations,” Int. Journal of Systems Science, vol. 53, no. 10, pp. 2165–2179, Jul. 2022. doi: 10.1080/00207721.2022.2043483
|
| [28] |
X. Li, H. Dong, Z. Wang, and F. Han, “Set-membership filtering for state-saturated systems with mixed time-delays under weighted try-once-discard protocol,” IEEE Trans. Circuits and Systems II: Express Briefs, vol. 66, no. 2, pp. 312–316, Feb. 2019. doi: 10.1109/TCSII.2018.2855701
|
| [29] |
B. Shen, Z. Wang, D. Wang, and H. Liu, “Distributed state-saturated recursive filtering over sensor networks under Round-Robin protocol,” IEEE Trans. Cybernetics, vol. 50, no. 8, pp. 3605–3615, Aug. 2020. doi: 10.1109/TCYB.2019.2932460
|
| [30] |
L. Chang, Q.-L. Han, X. Ge, C. Zhang, and X. Zhang, “On designing distributed prescribed finite-time observers for strict-feedback nonlinear systems,” IEEE Trans. Cybernetics, vol. 51, no. 9, pp. 4695–4706, Sept. 2021. doi: 10.1109/TCYB.2019.2951067
|
| [31] |
W. Cheng, H. Liang, and S. Hu, “Event-triggered neural adaptive anti-disturbance control of nonlinear multi-agent systems with asymmetric constraints,” Int. Journal of Systems Science, vol. 53, no. 11, pp. 2461–2476, Aug. 2022. doi: 10.1080/00207721.2022.2053892
|
| [32] |
F. Han, G. Wei, D. Ding, and Y. Song, “Local condition based consensus filtering with stochastic nonlinearities and multiple missing measurements,” IEEE Trans. Automatic Control, vol. 62, no. 9, pp. 4784–4790, Sept. 2017. doi: 10.1109/TAC.2017.2689722
|
| [33] |
W. Li and M. Krstic, “Mean-nonovershooting control of stochastic nonlinear systems,” IEEE Trans. Automatic Control, vol. 66, no. 12, pp. 5756–5771, Dec. 2021. doi: 10.1109/TAC.2020.3042454
|
| [34] |
J. Qiu, W. Ji, H. K. Lam, and M. Wang, “Fuzzy-affine-model-based sampled-data filtering design for stochastic nonlinear systems,” IEEE Trans. Fuzzy Systems, vol. 29, no. 11, pp. 3360–3373, Nov. 2021. doi: 10.1109/TFUZZ.2020.3021699
|
| [35] |
X. Wang, D. Ding, X. Ge, and Q.-L. Han, “Supplementary control for quantized discrete-time nonlinear systems under goal representation heuristic dynamic programming,” IEEE Trans. Neural Networks and Learning Systems, 2022, DOI: 10.1109/TNNLS.2022.3201521.
|
| [36] |
Y. Wang, X. Chen, and H. Guo, “Event-trirmered H ∞ fault detection observer design for discrete-time Lipschitz nonlinear networked control systems in finite-frequency domain,” Int. Journal of Systems Science, vol. 53, no. 3, pp. 488–503, Feb. 2022. doi: 10.1080/00207721.2021.1961915
|
| [37] |
L. Li, D. Yu, Y. Zhao, and H. Yang, “Stochastic stability of a modified unscented Kalman filter with stochastic nonlinearities and multiple fading measurements,” Journal of the Franklin Institute-Engineering and Applied Mathematics, vol. 354, no. 2, pp. 650–667, Jan. 2017. doi: 10.1016/j.jfranklin.2016.10.028
|
| [38] |
S. Wen, Z. Zeng, and T. Huang, “Reliable H ∞ for mixed time-delay systems with stochastic nonlinearities and multiplicative noises,” Asian Journal of Control, vol. 15, no. 2, pp. 583–593, Mar. 2013. doi: 10.1002/asjc.571
|
| [39] |
S. Zhang, J. Zhao, Y. Xia, and G. Li, “Gain-constrained extended Kalman filtering with stochastic nonlinearities and randomly occurring measurement delays,” Circults Systems and Signal Processing, vol. 35, no. 11, pp. 3957–3980, Nov. 2016. doi: 10.1007/s00034-016-0244-4
|
| [40] |
I. D. Coope, “On matrix trace inequalities and related topics for products of Hermitian matrices,” Journal of Mathematical Analysis and Applications, vol. 188, pp. 99–101, 1994.
|
| [41] |
H. Geng, Z. Wang, X. Yi, F. E. Alsaadi, and Y. Cheng, “Tobit Kalman filtering for fractional-order systems with stochastic nonlinearities under Round-Robin protocol,” Int. Journal of Robust and Nonlinear Control, vol. 31, no. 6, pp. 2348–2370, Jan. 2021. doi: 10.1002/rnc.5396
|
| [42] |
Q. Li, Z. Wang, J. Hu, and W. Sheng, “Distributed state and fault estimation over sensor networks with probabilistic quantizations: The dynamic event-triggered case,” Automatica, vol. 131, p. 109784, 2021.
|
| [43] |
F. Qu, X. Zhao, X. Wang, and E. Tian, “Probabilistic-constrained distributed fusion filtering for a class of time-varying systems over sensor networks: A torus-event-triggering mechanism,” Int. Journal of Systems Science, vol. 53, no. 6, pp. 1288–1297, Apr. 2022. doi: 10.1080/00207721.2021.1998721
|
| [44] |
J. Wei and D. Ye, “Transmission schedule for jointly optimizing remote state estimation and wireless sensor network lifetime,” Neurocomputing, vol. 514, pp. 374–384, Dec. 2022. doi: 10.1016/j.neucom.2022.10.011
|
| [45] |
Y. Cui, Y. Liu, W. Zhang, and F. E. Alsaadi, “Sampled-based consensus for nonlinear multiagent systems with deception attacks: The decoupled method,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 51, no. 1, pp. 561–573, Jan. 2021. doi: 10.1109/TSMC.2018.2876497
|
| [46] |
W. Li, Y. Niu, and Z. Cao, “Event-triggered sliding mode control for multi-agent systems subject to channel fading,” Int. Journal of Systems Science, vol. 53, no. 6, pp. 1233–1244, Apr. 2022. doi: 10.1080/00207721.2021.1995527
|
| [47] |
X. Li, Q. Song, Z. Zhao, Y. Liu, and F. E. Alsaadi, “Optimal control and zero-sum differential game for Hurwicz model considering singular systems with multifactor and uncertainty,” Int. Journal of Systems Science, vol. 53, no. 7, pp. 1416–1435, May 2022. doi: 10.1080/00207721.2021.2005175
|
| [48] |
S. Xiao, X. Ge, Q.-L. Han, and Y. Zhang, “Secure and collision-free multi-platoon control of automated vehicles under data falsification attacks,” Automatica, vol. 145, Nov. 2022.
|
| [49] |
C. Yuan, H. Yan, Y. Wang, Y. Chang, and X. Zhan, “Formation-containment control of heterogeneous linear multi-agent systems with adaptive event-triggered strategies,” Int. Journal of Systems Science, vol. 53, no. 9, pp. 1942–1957, Jul. 2022. doi: 10.1080/00207721.2022.2031339
|
| [50] |
X. Zhang, Q.-L. Han, and X. Ge, “A novel approach to H∞ performance analysis of discrete-time networked systems subject to network-induced delays and malicious packet dropouts,” Automatica, vol. 136, p. 110010, Feb. 2022.
|
Figures(6)






 DownLoad:
DownLoad: