2022, 9(6): 1015-1025.
doi: 10.1109/JAS.2022.105626
Abstract:
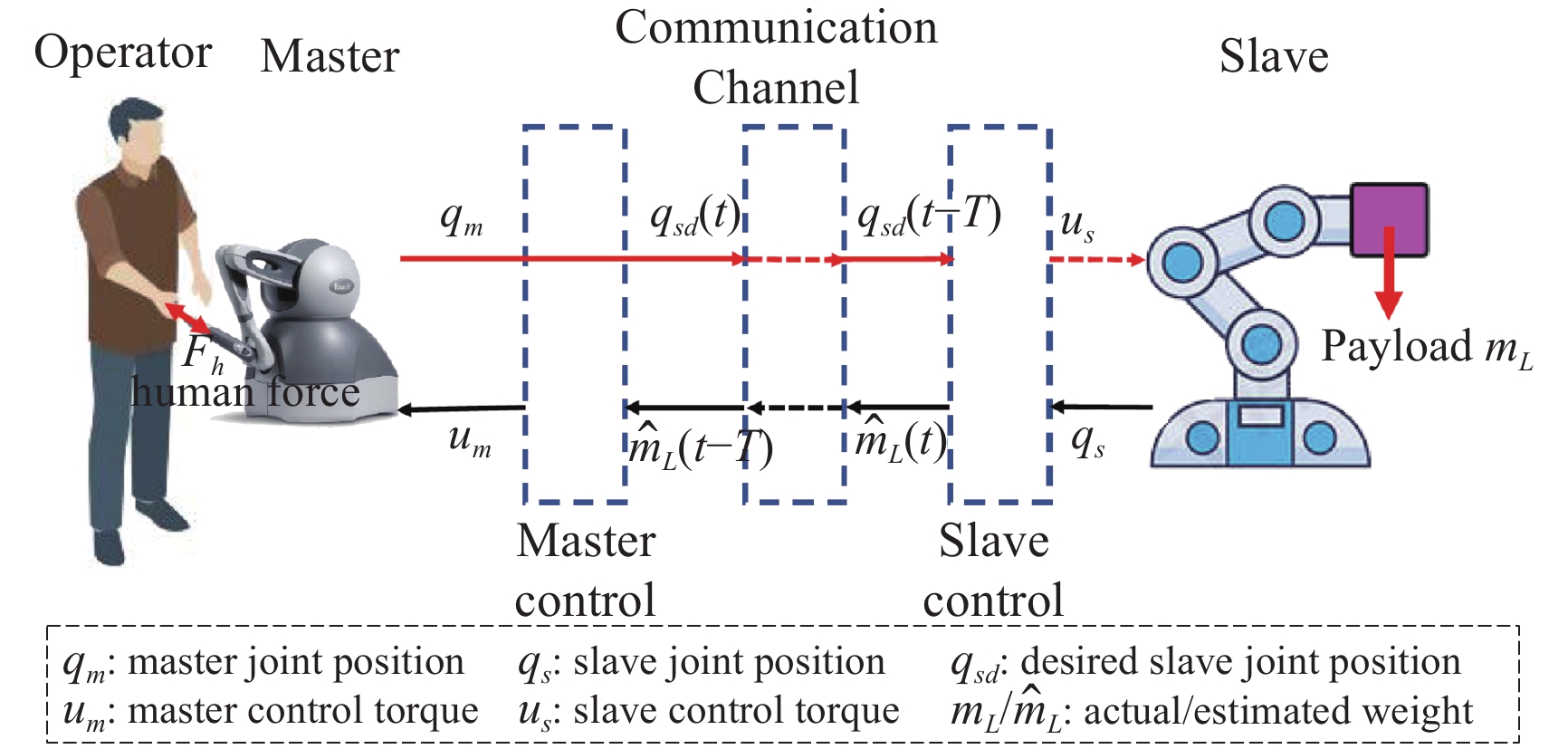
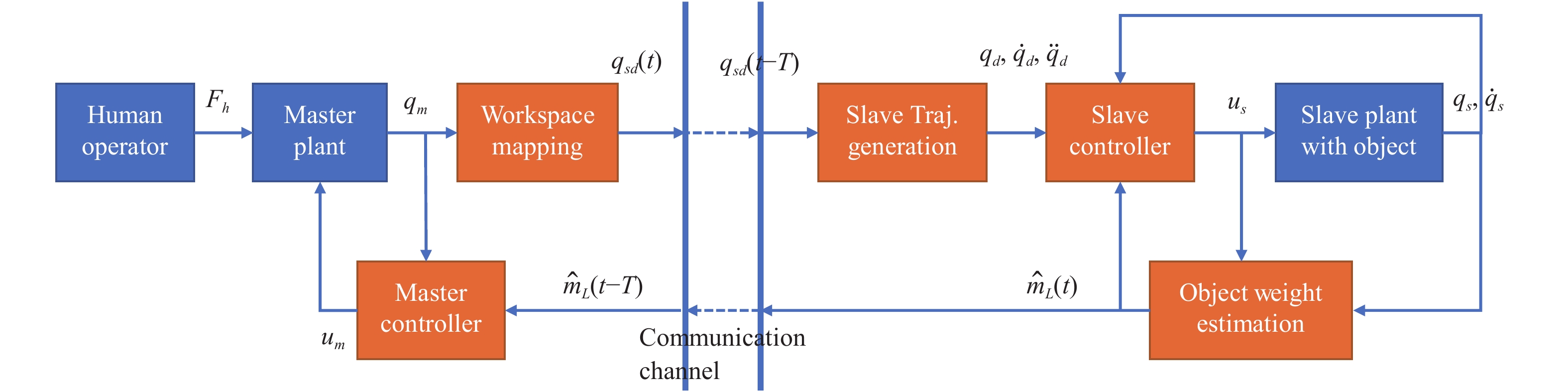
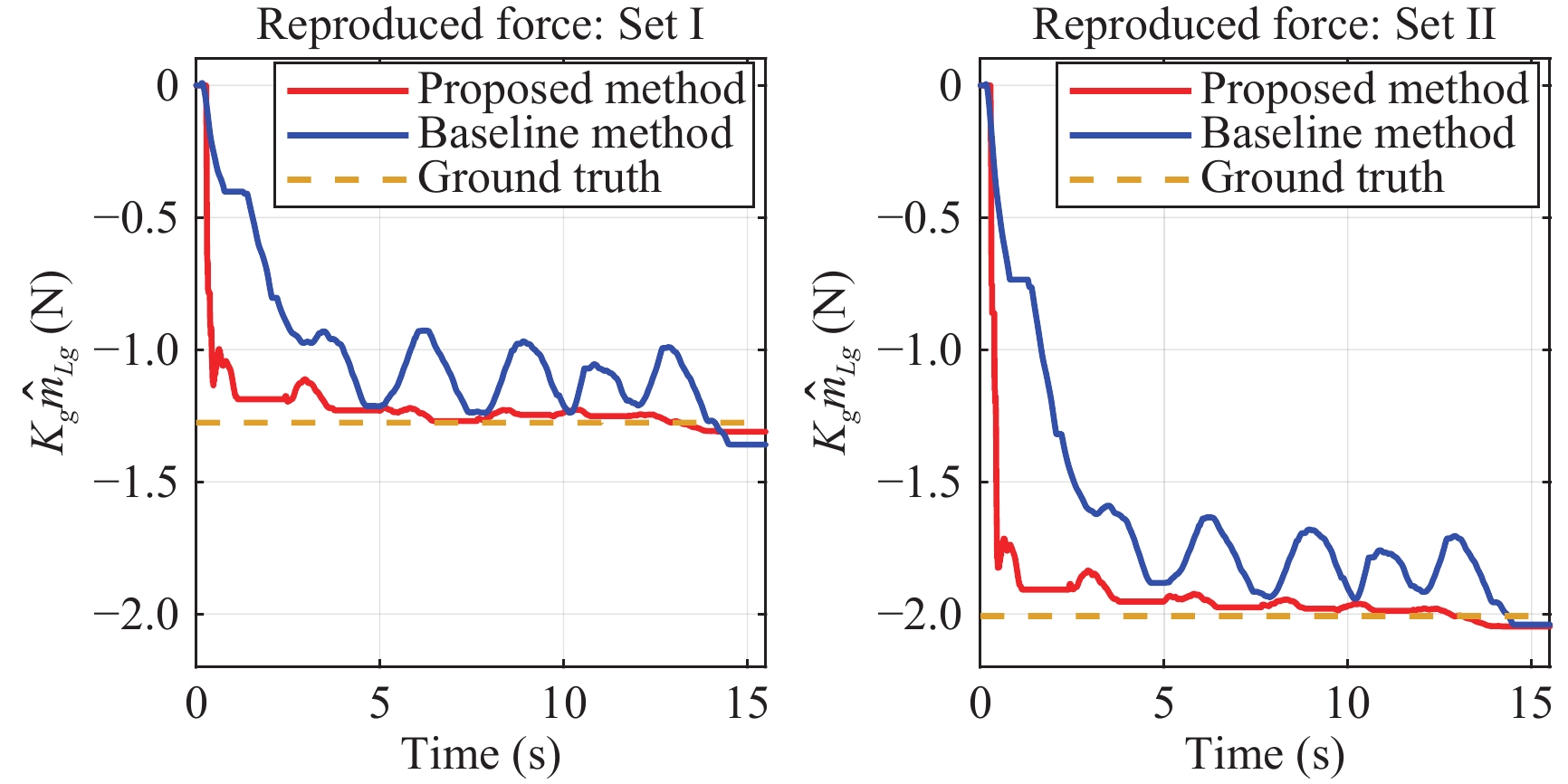
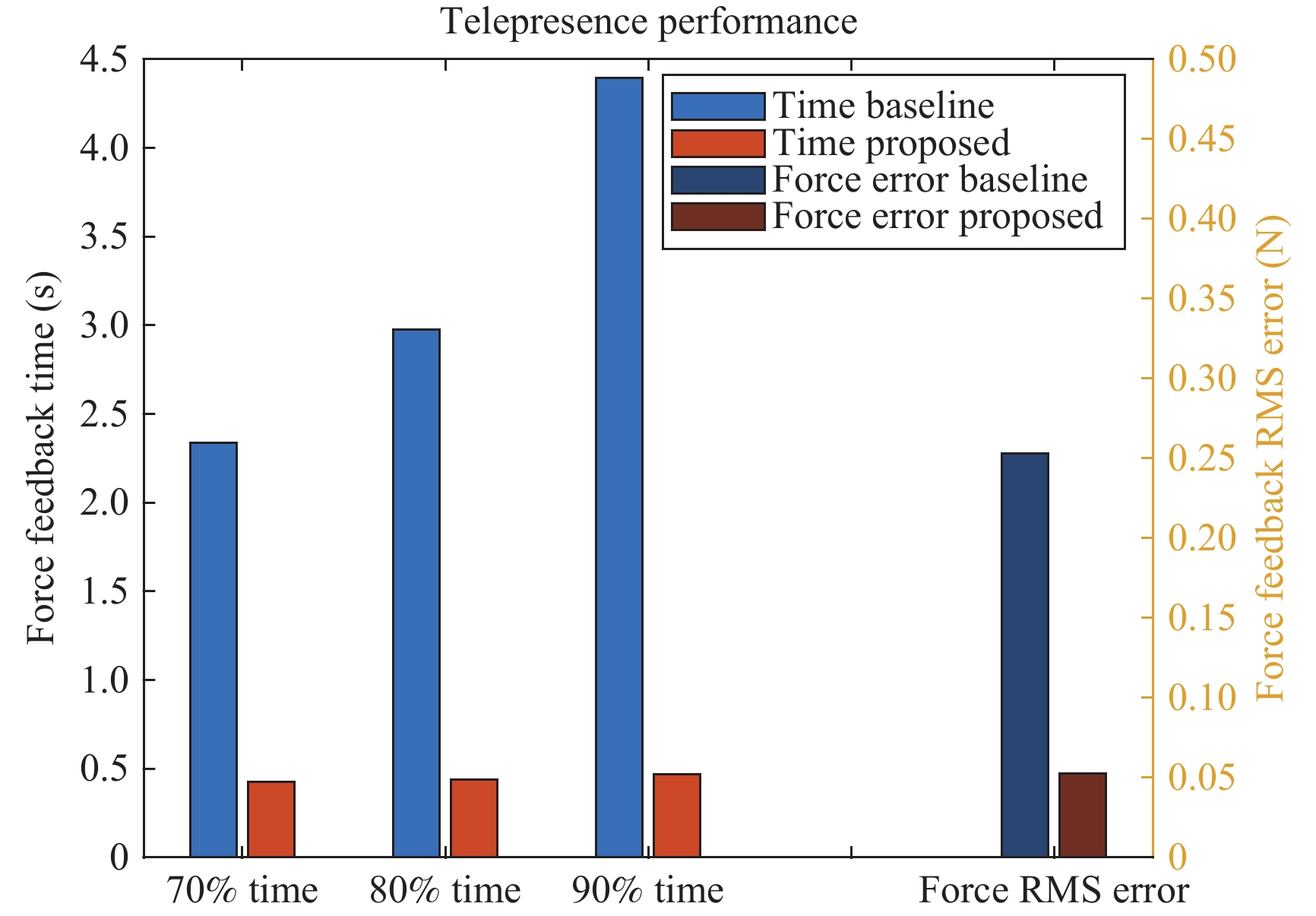
Currently, most teleoperation work is focusing on scenarios where slave robots interact with unknown environments. However, in some fields such as medical robots or rescue robots, the other typical teleoperation application is precise object transportation. Generally, the object’s weight is unknown yet essential for both accurate control of the slave robot and intuitive perception of the human operator. However, due to high cost and limited installation space, it is unreliable to employ a force sensor to directly measure the weight. Therefore, in this paper, a control scheme free of force sensor is proposed for teleoperation robots to transfer a weight-unknown object accurately. In this scheme, the workspace mapping between master and slave robot is firstly established, based on which, the operator can generate command trajectory on-line by operating the master robot. Then, a slave controller is designed to follow the master command closely and estimate the object’s weight rapidly, accurately and robust to unmodeled uncertainties. Finally, for the sake of telepresence, a master controller is designed to generate force feedback to reproduce the estimated weight of the object. In the end, comparative experiments show that the proposed scheme can achieve better control accuracy and telepresence, with accurate force feedback generated in only 500 ms.
J. F. Hu, Z. Chen, X. Ma, H. Lai, and B. Yao, “A telepresence-guaranteed control scheme for teleoperation applications of transferring weight-unknown objects,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 1015–1025, Jun. 2022. doi: 10.1109/JAS.2022.105626.
















 E-mail Alert
E-mail Alert