2019, 6(5): 1240-1250.
doi: 10.1109/JAS.2017.7510454
Abstract:
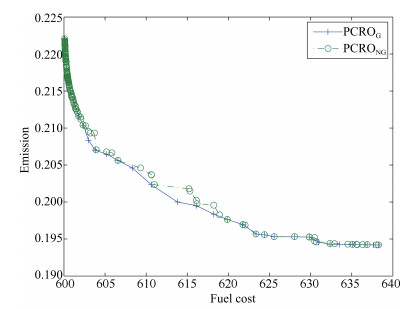
In this study, we present a Pareto-based chemical-reaction optimization (PCRO) algorithm for solving the multi-area environmental/economic dispatch optimization problems. Two objectives are minimized simultaneously, i.e., total fuel cost and emission. In the proposed algorithm, each solution is represented by a chemical molecule. A novel encoding mechanism for solving the multi-area environmental/economic dispatch optimization problems is designed to dynamically enhance the performance of the proposed algorithm. Then, an ensemble of effective neighborhood approaches is developed, and a self-adaptive neighborhood structure selection mechanism is also embedded in PCRO to increase the search ability while maintaining population diversity. In addition, a grid-based crowding distance strategy is introduced, which can obviously enable the algorithm to easily converge near the Pareto front. Furthermore, a kinetic-energy-based search procedure is developed to enhance the global search ability. Finally, the proposed algorithm is tested on sets of the instances that are generated based on realistic production. Through the analysis of experimental results, the highly effective performance of the proposed PCRO algorithm is favorably compared with several algorithms, with regards to both solution quality and diversity.
Junqing Li, Quanke Pan, Peiyong Duan, Hongyan Sang and Kaizhou Gao, "Solving Multi-Area Environmental/Economic Dispatch by Pareto-Based Chemical-Reaction Optimization Algorithm," IEEE/CAA J. Autom. Sinica, vol. 6, no. 5, pp. 1240-1250, Sept. 2019. doi: 10.1109/JAS.2017.7510454.












 E-mail Alert
E-mail Alert