2019, 6(4): 865-893.
doi: 10.1109/JAS.2019.1911603
Abstract:
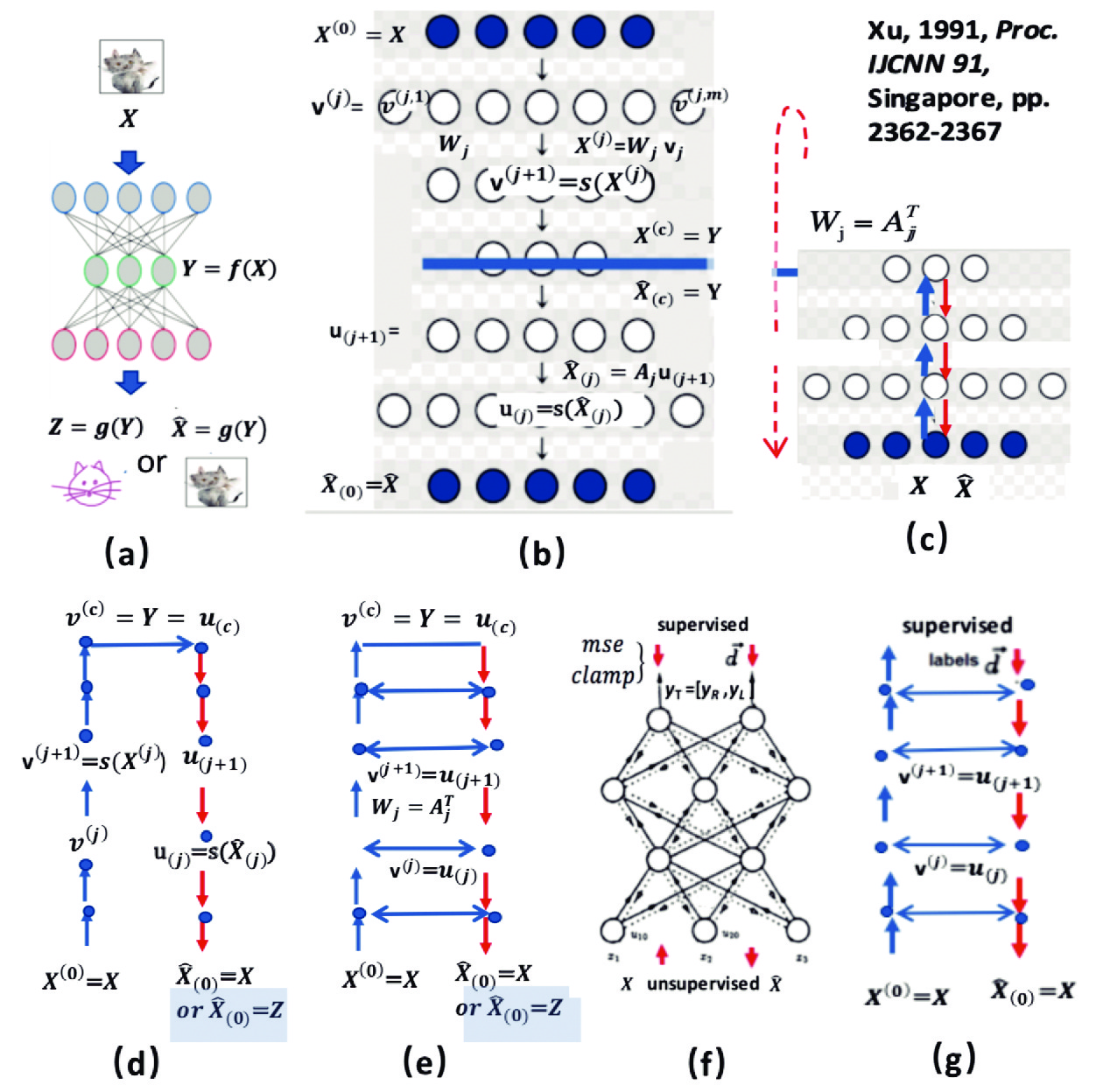
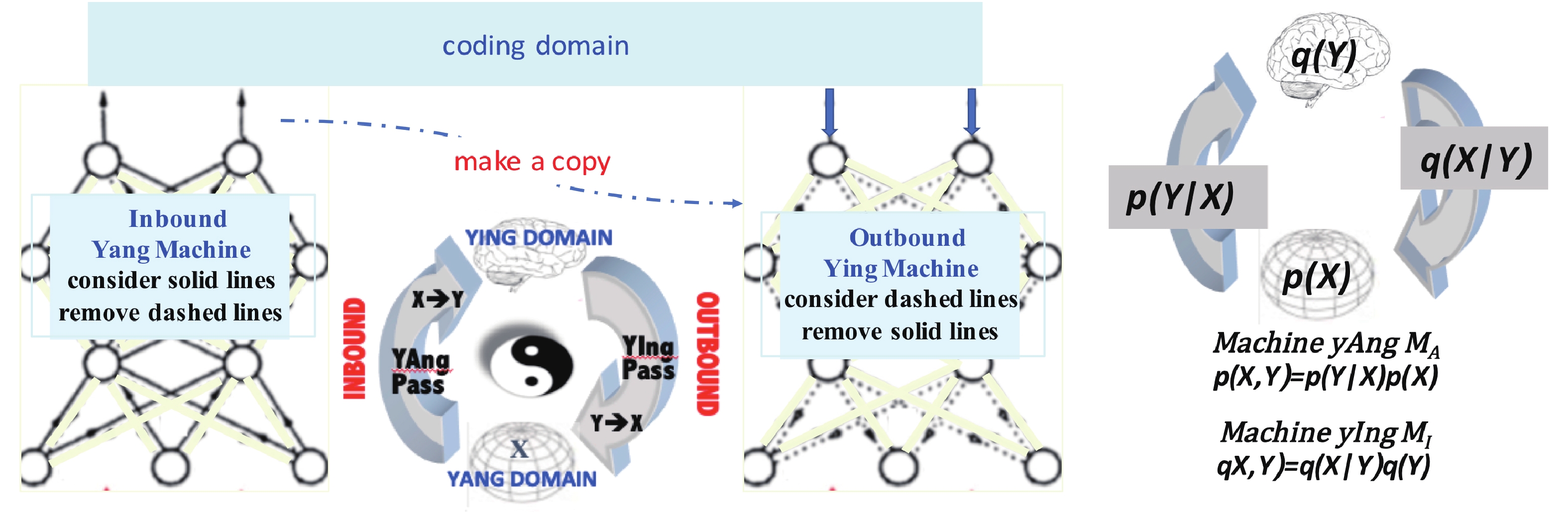
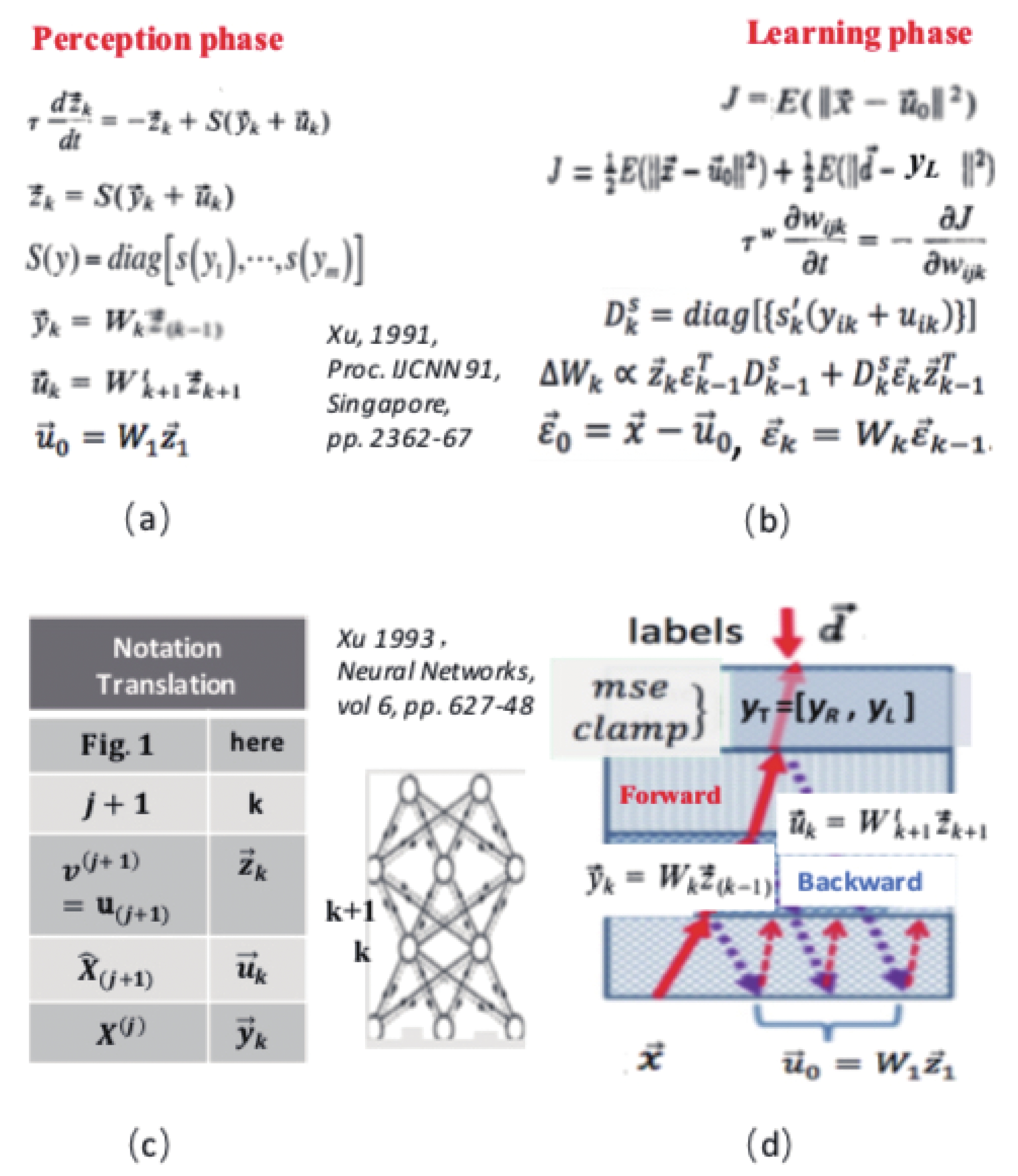
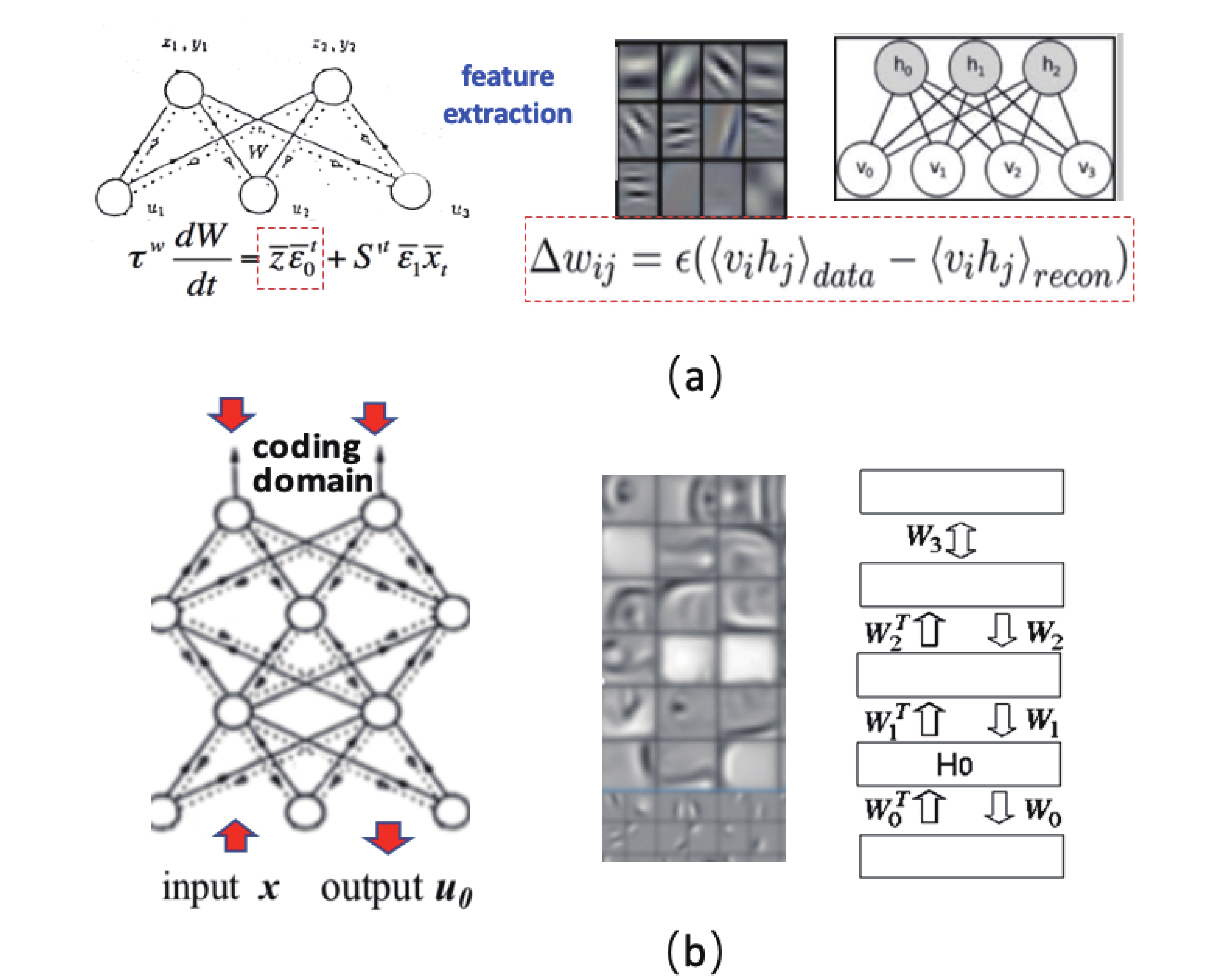
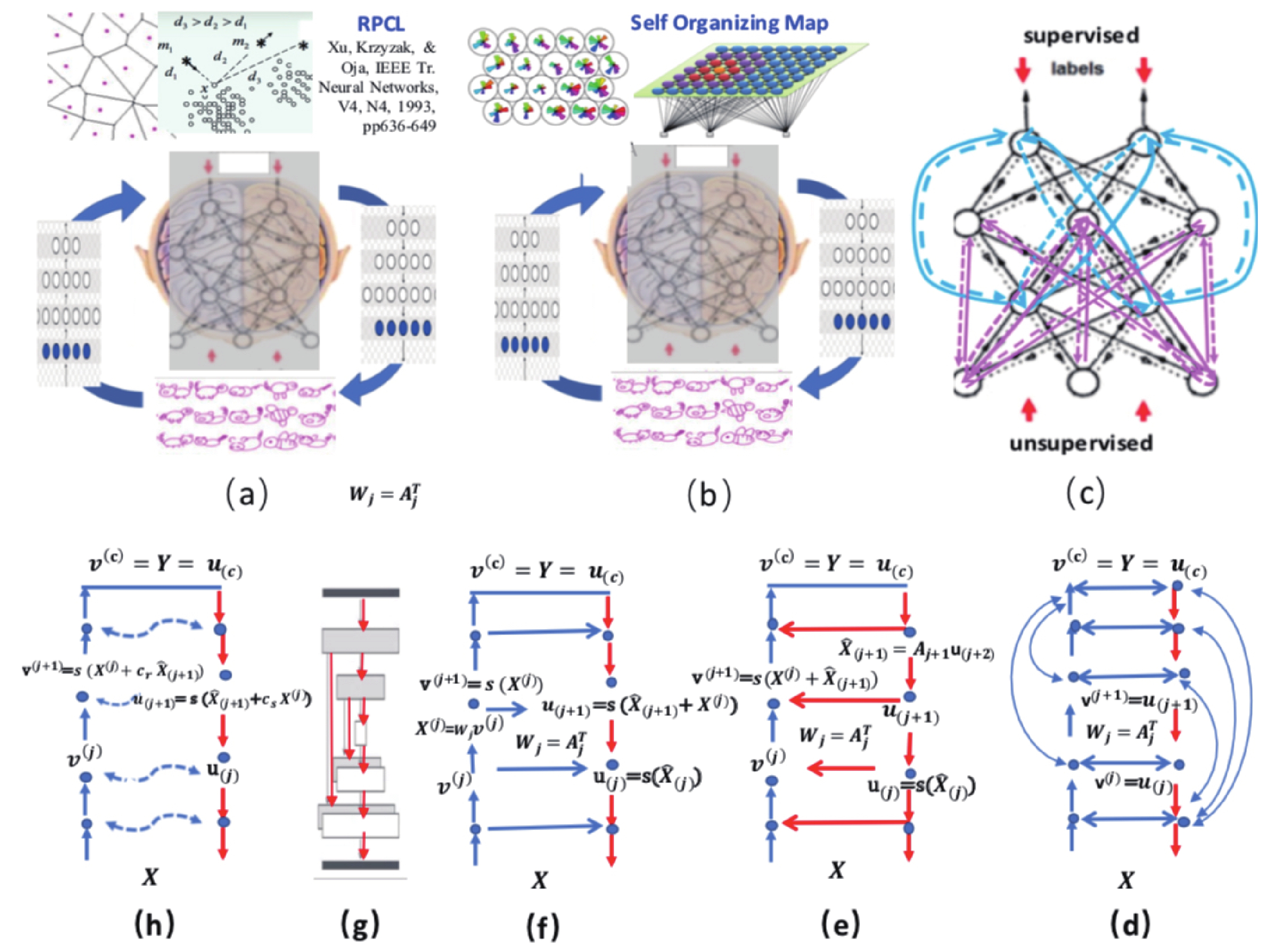
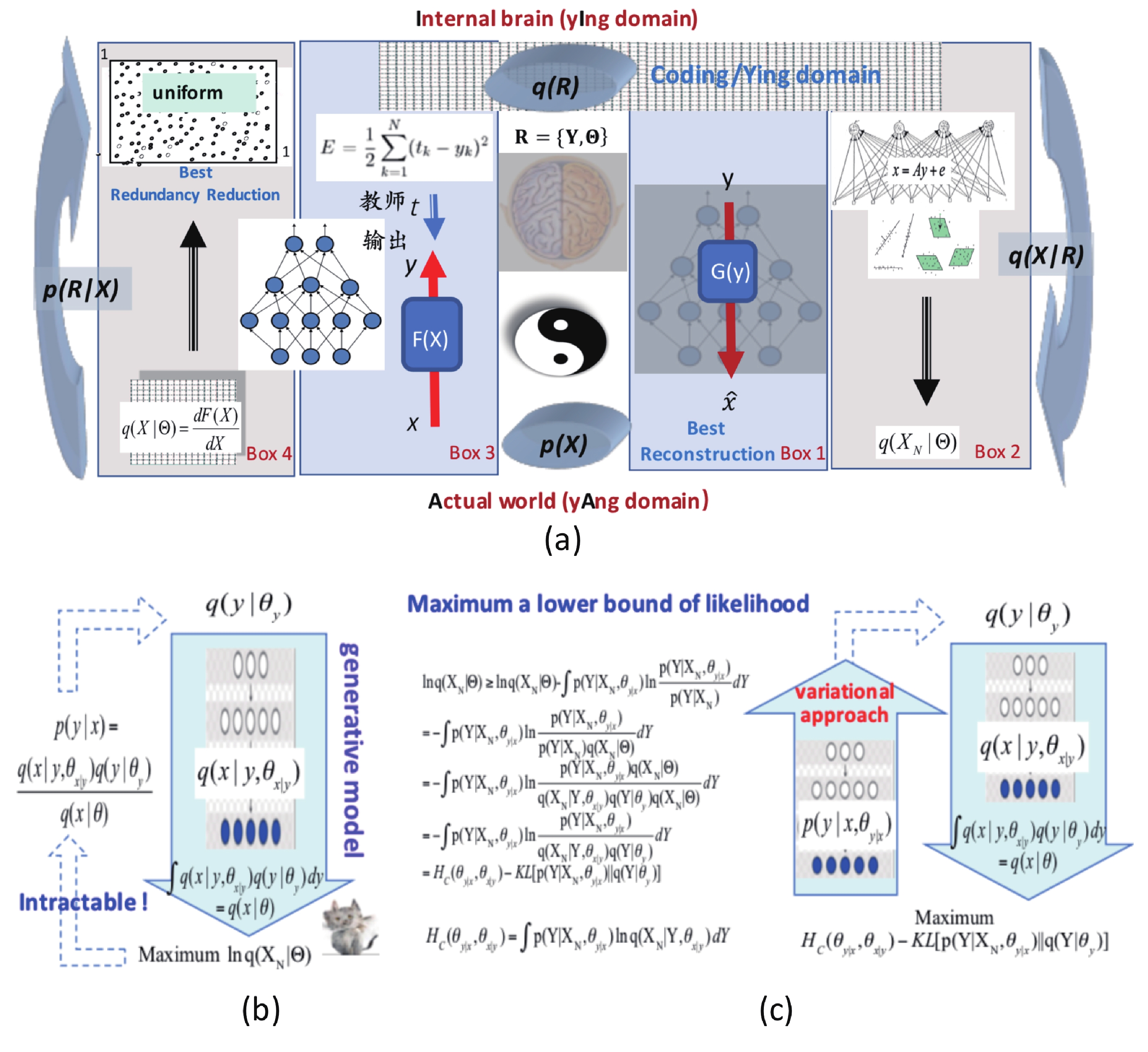
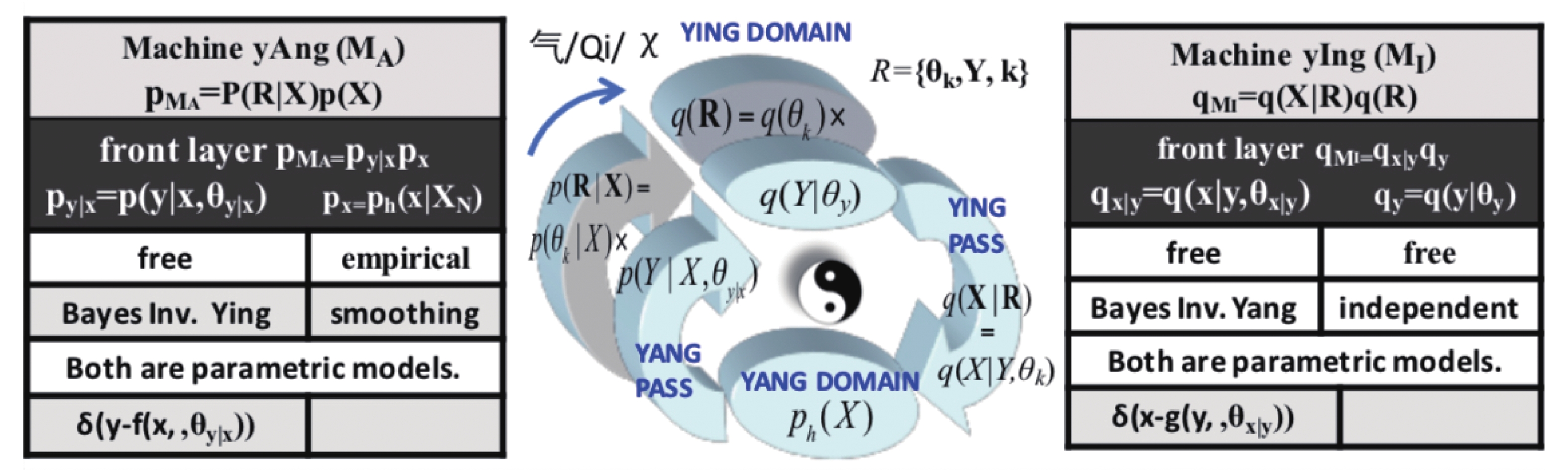
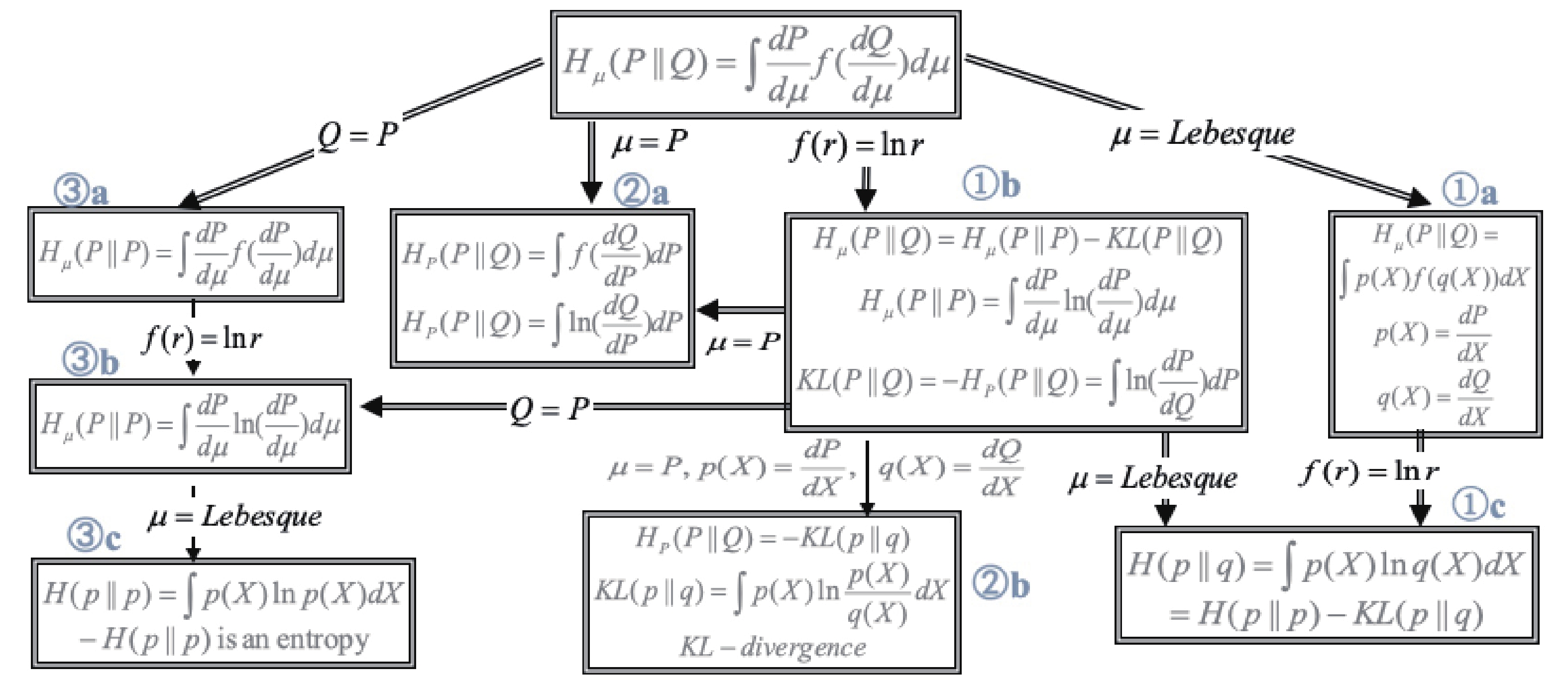
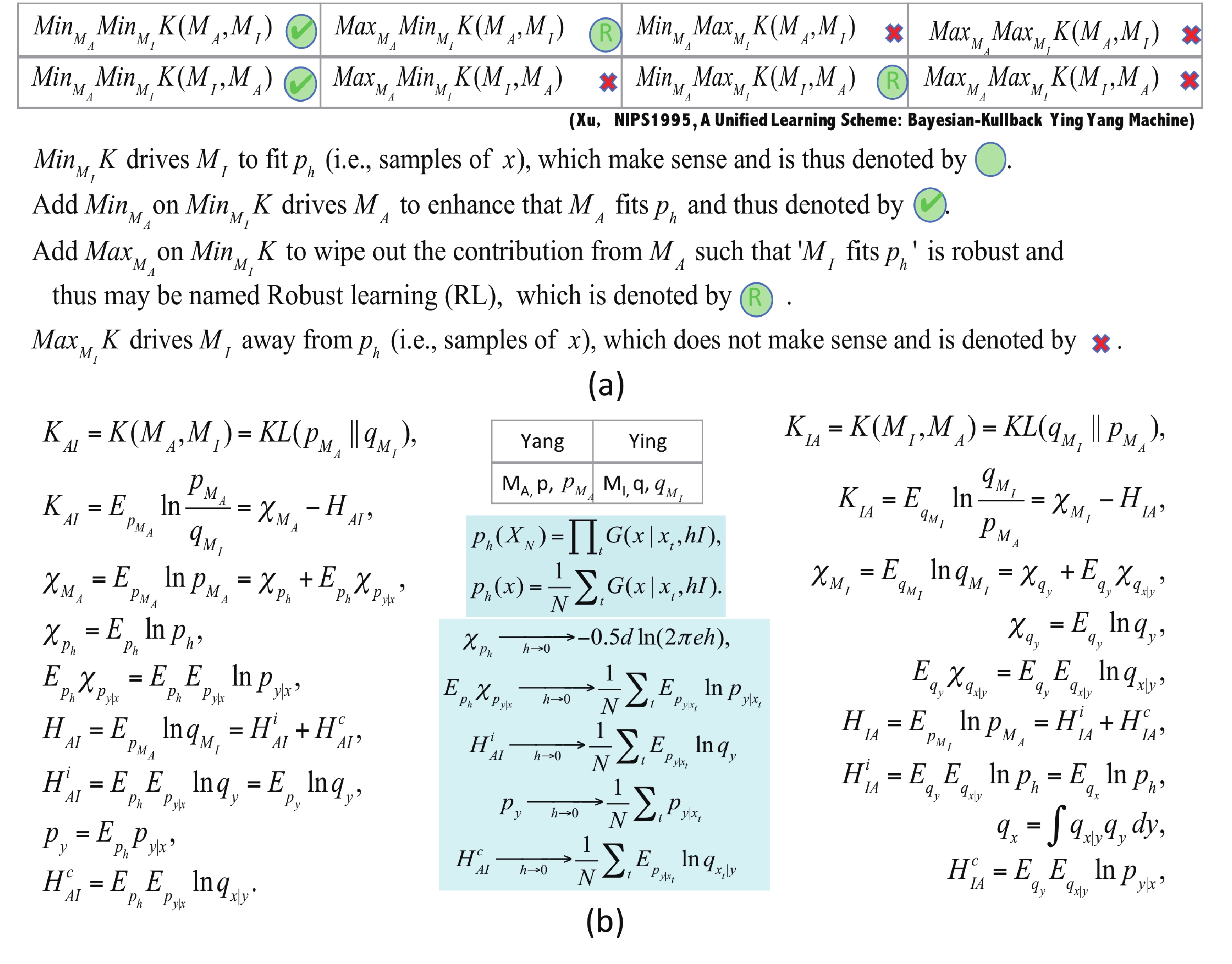
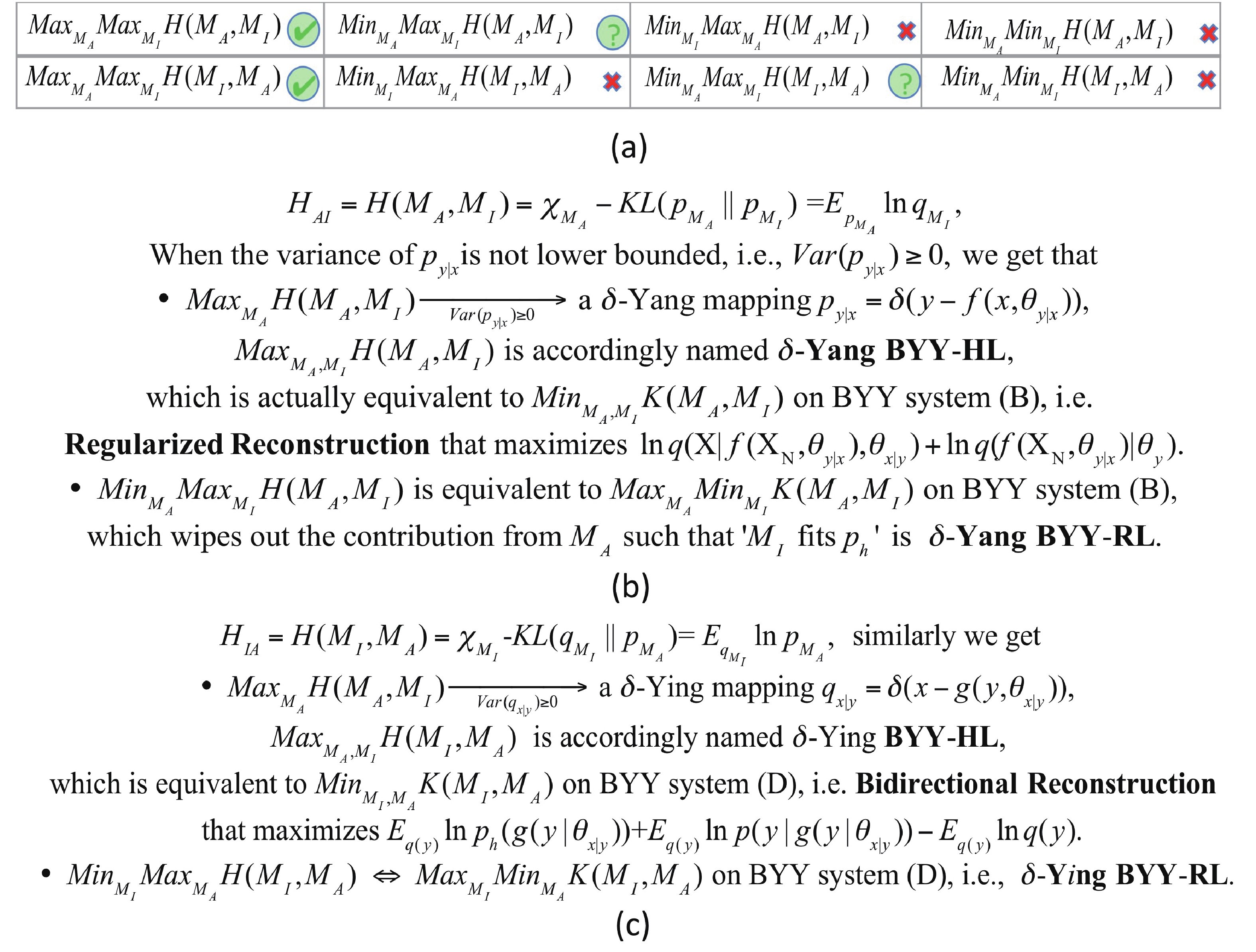
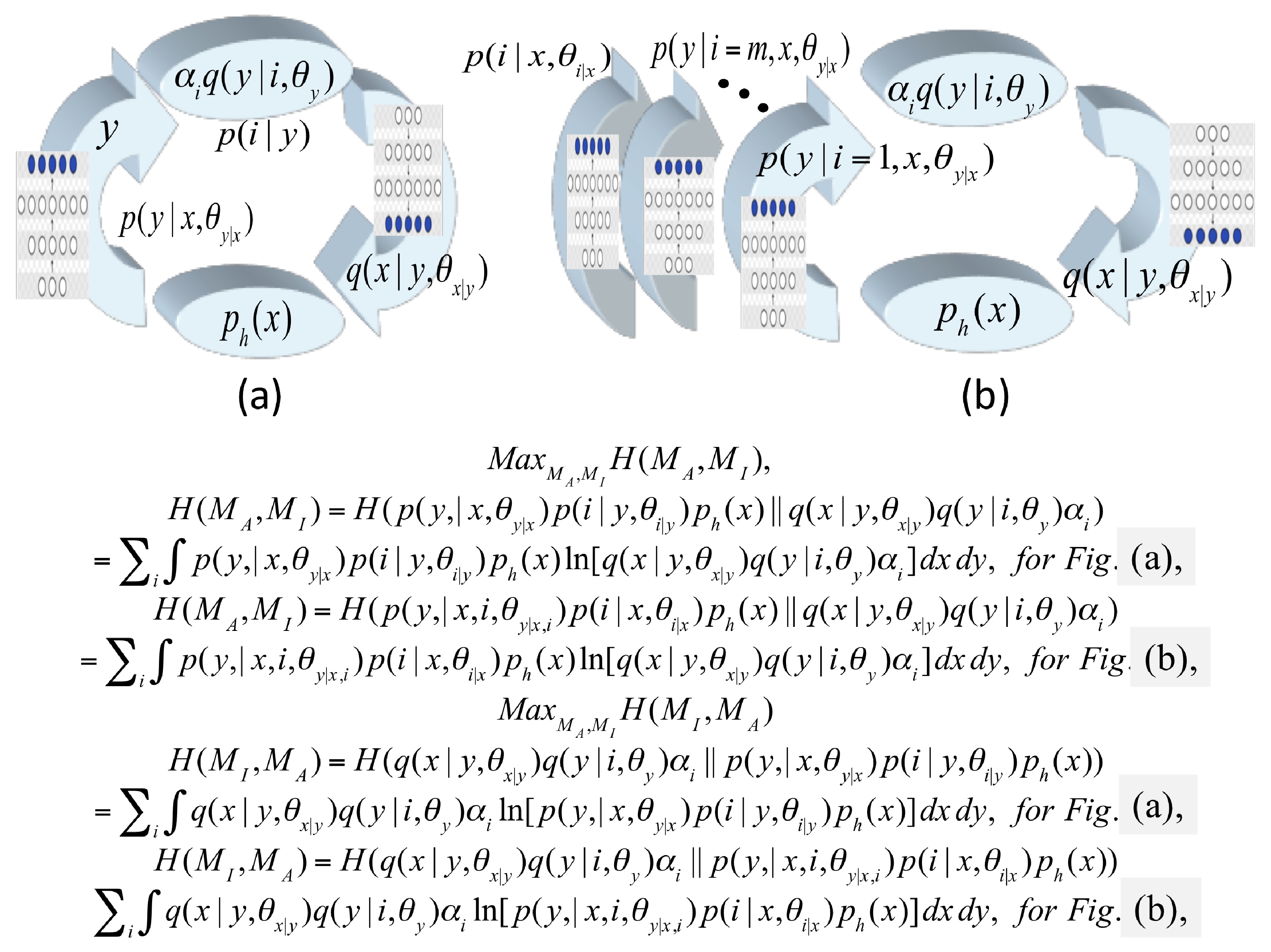
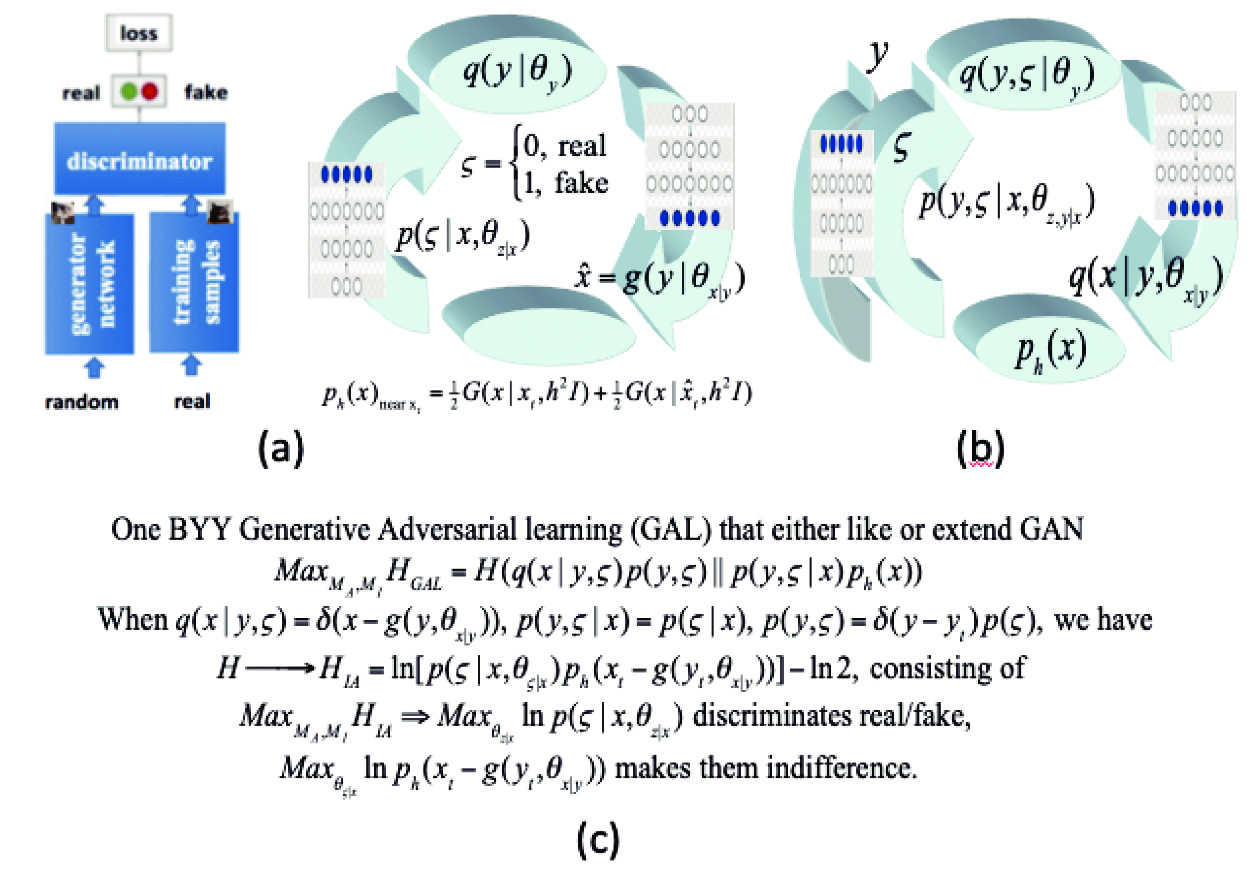
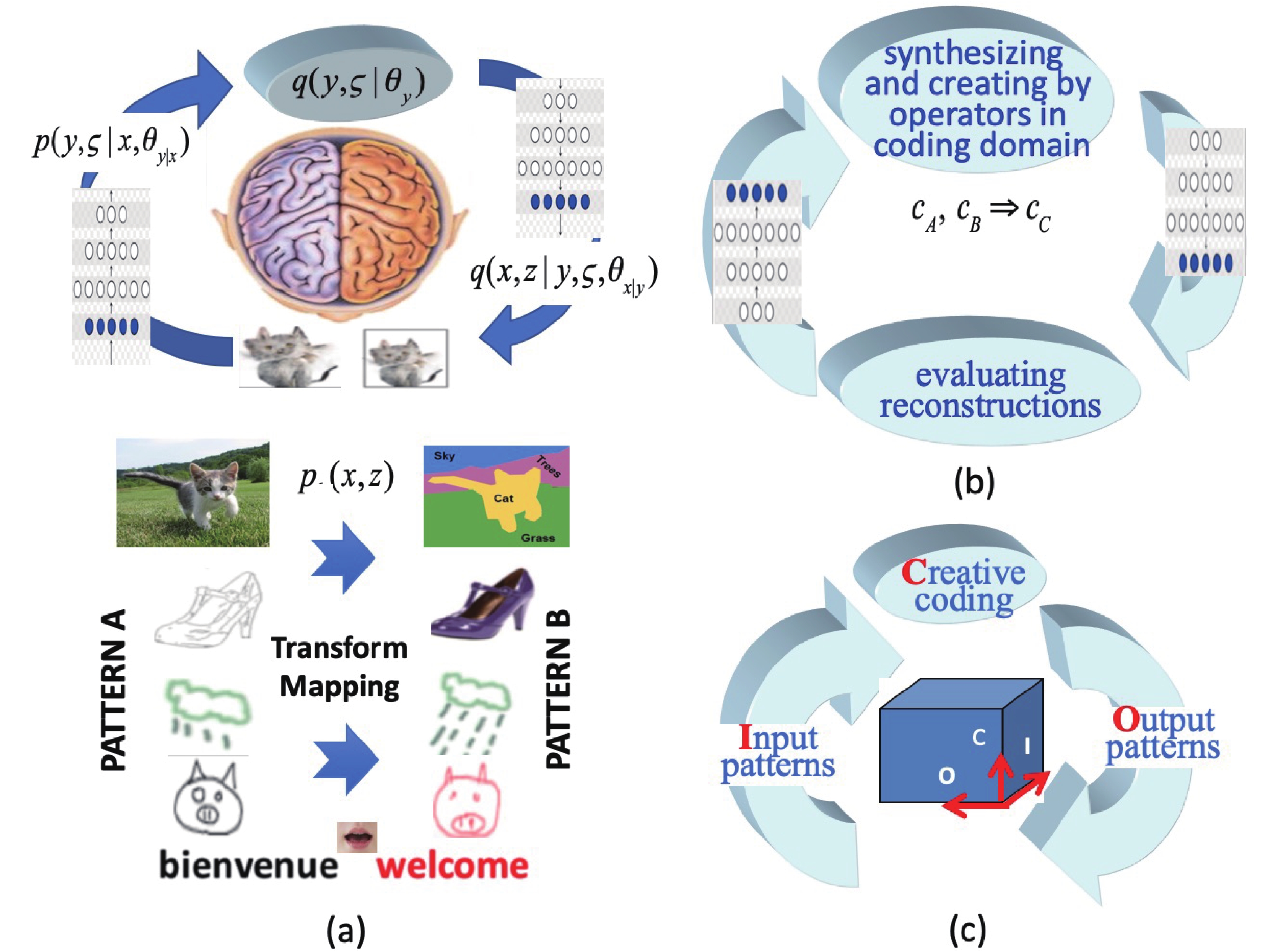
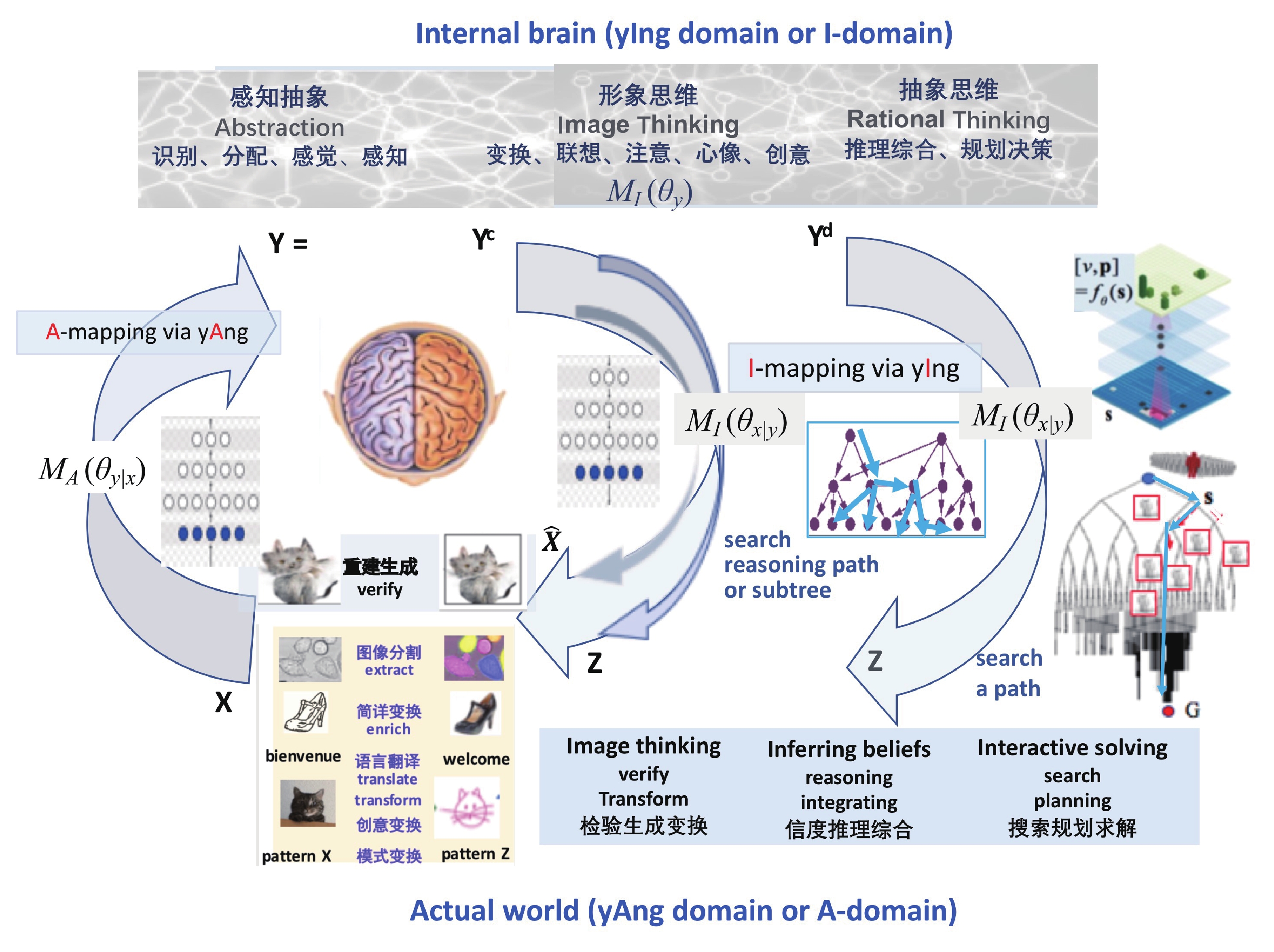
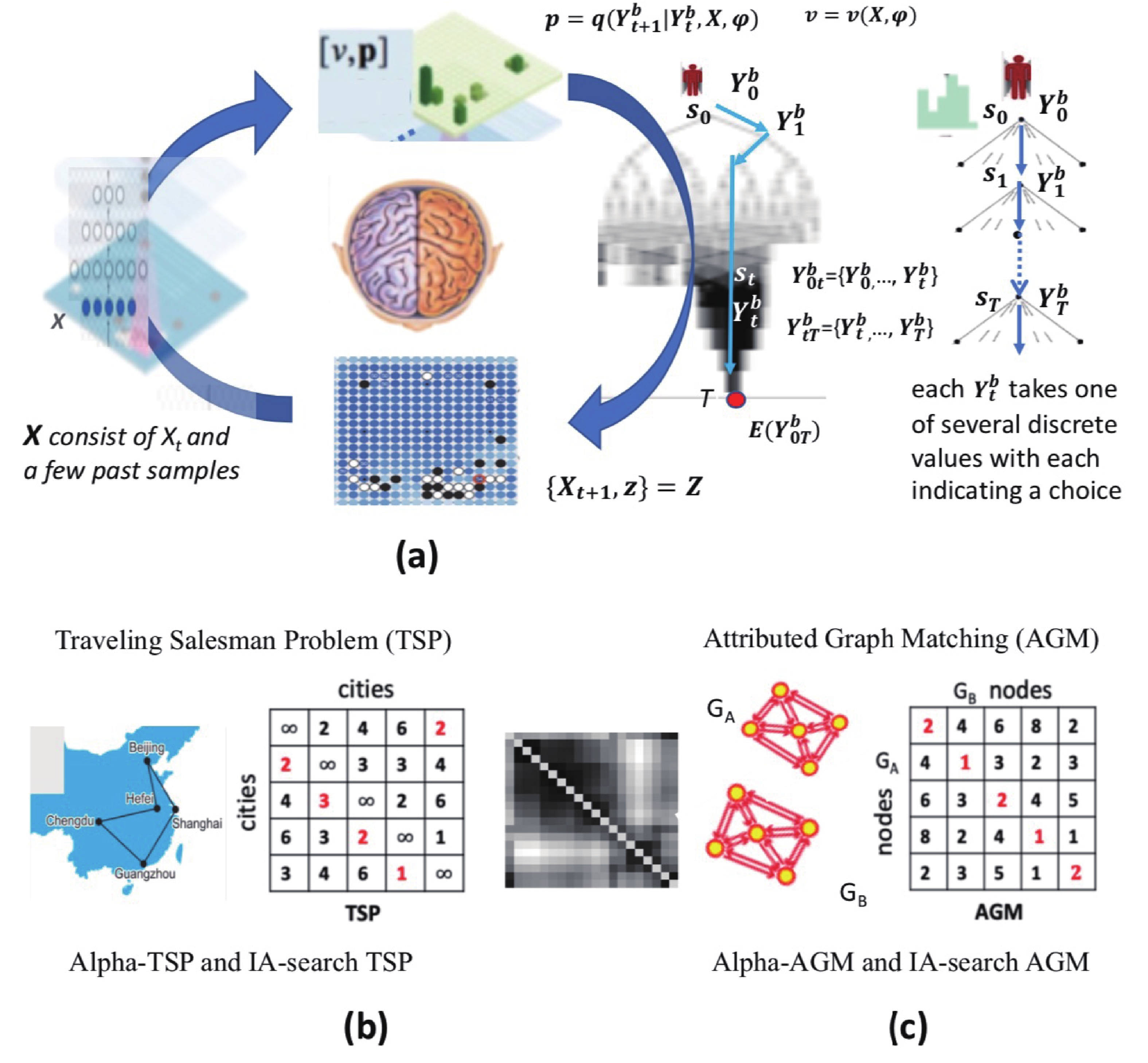
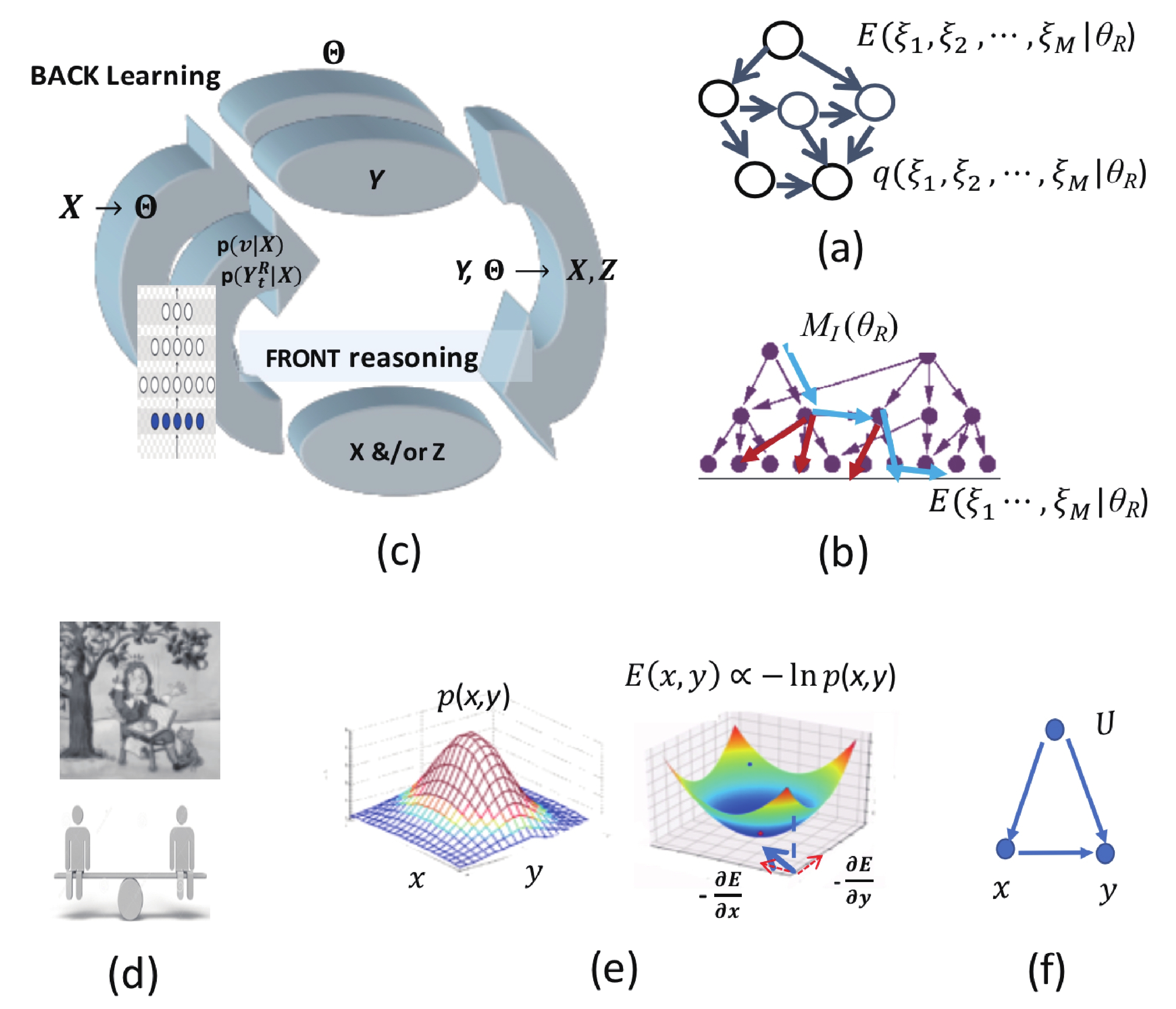
Advances on bidirectional intelligence are overviewed along three threads, with extensions and new perspectives. The first thread is about bidirectional learning architecture, exploring five dualities that enable Lmser six cognitive functions and provide new perspectives on which a lot of extensions and particularlly flexible Lmser are proposed. Interestingly, either or two of these dualities actually takes an important role in recent models such as U-net, ResNet, and DenseNet. The second thread is about bidirectional learning principles unified by best yIng-yAng (IA) harmony in BYY system. After getting insights on deep bidirectional learning from a bird-viewing on existing typical learning principles from one or both of the inward and outward directions, maximum likelihood, variational principle, and several other learning principles are summarised as exemplars of the BYY learning, with new perspectives on advanced topics. The third thread further proceeds to deep bidirectional intelligence, driven by long term dynamics (LTD) for parameter learning and short term dynamics (STD) for image thinking and rational thinking in harmony. Image thinking deals with information flow of continuously valued arrays and especially image sequence, as if thinking was displayed in the real world, exemplified by the flow from inward encoding/cognition to outward reconstruction/transformation performed in Lmser learning and BYY learning. In contrast, rational thinking handles symbolic strings or discretely valued vectors, performing uncertainty reasoning and problem solving. In particular, a general thesis is proposed for bidirectional intelligence, featured by BYY intelligence potential theory (BYY-IPT) and nine essential dualities in architecture, fundamentals, and implementation, respectively. Then, problems of combinatorial solving and uncertainty reasoning are investigated from this BYY IPT perspective. First, variants and extensions are suggested for AlphaGoZero like searching tasks, such as traveling salesman problem (TSP) and attributed graph matching (AGM) that are turned into Go like problems with help of a feature enrichment technique. Second, reasoning activities are summarized under guidance of BYY IPT from the aspects of constraint satisfaction, uncertainty propagation, and path or tree searching. Particularly, causal potential theory is proposed for discovering causal direction, with two roads developed for its implementation.
Lei Xu, "An Overview and Perspectives On Bidirectional Intelligence: Lmser Duality, Double IA Harmony, and Causal Computation," IEEE/CAA J. Autom. Sinica, vol. 6, no. 4, pp. 865-893, July 2019. doi: 10.1109/JAS.2019.1911603.















 E-mail Alert
E-mail Alert