2023, 10(11): 2070-2080.
doi: 10.1109/JAS.2023.123951
Abstract:
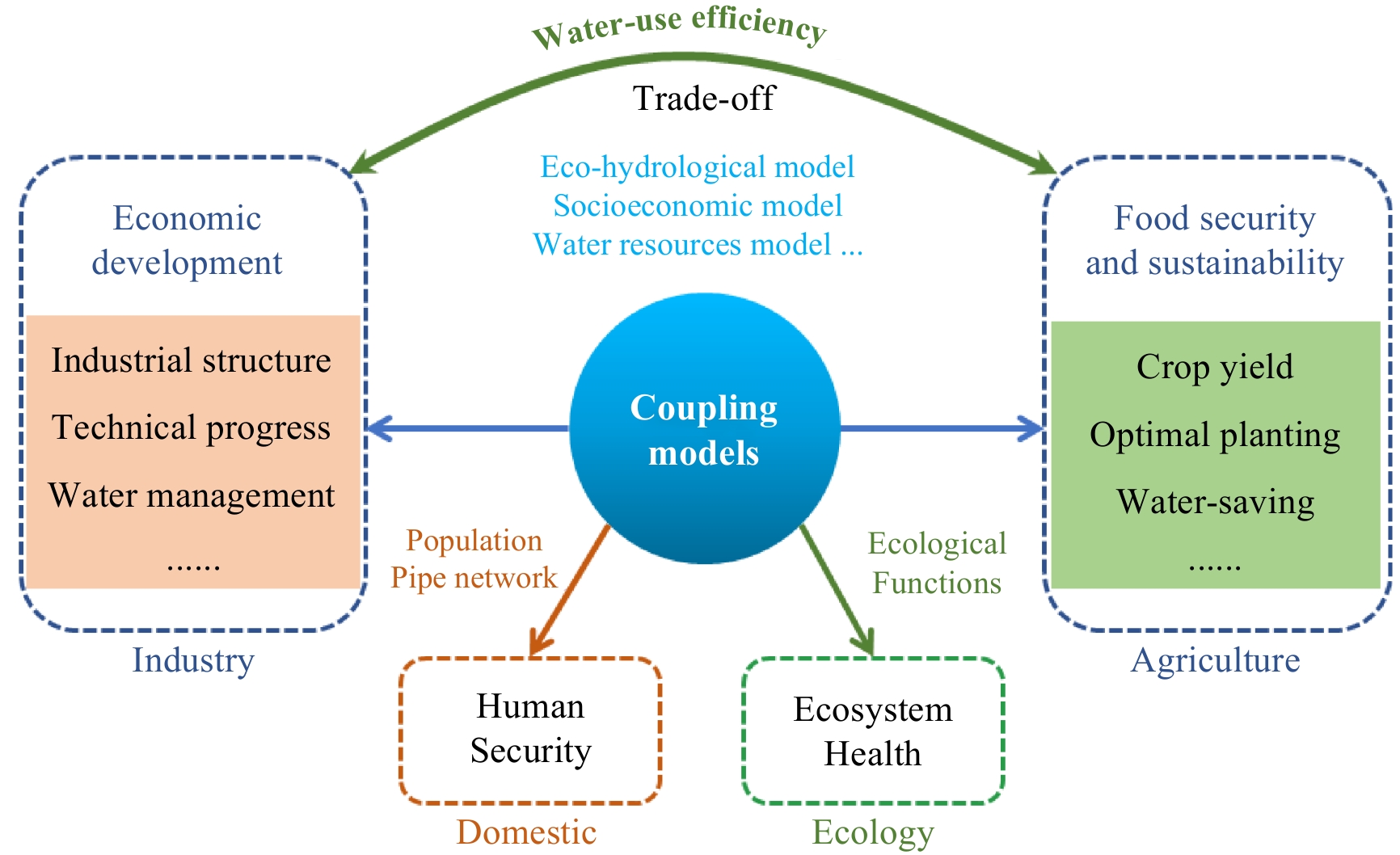
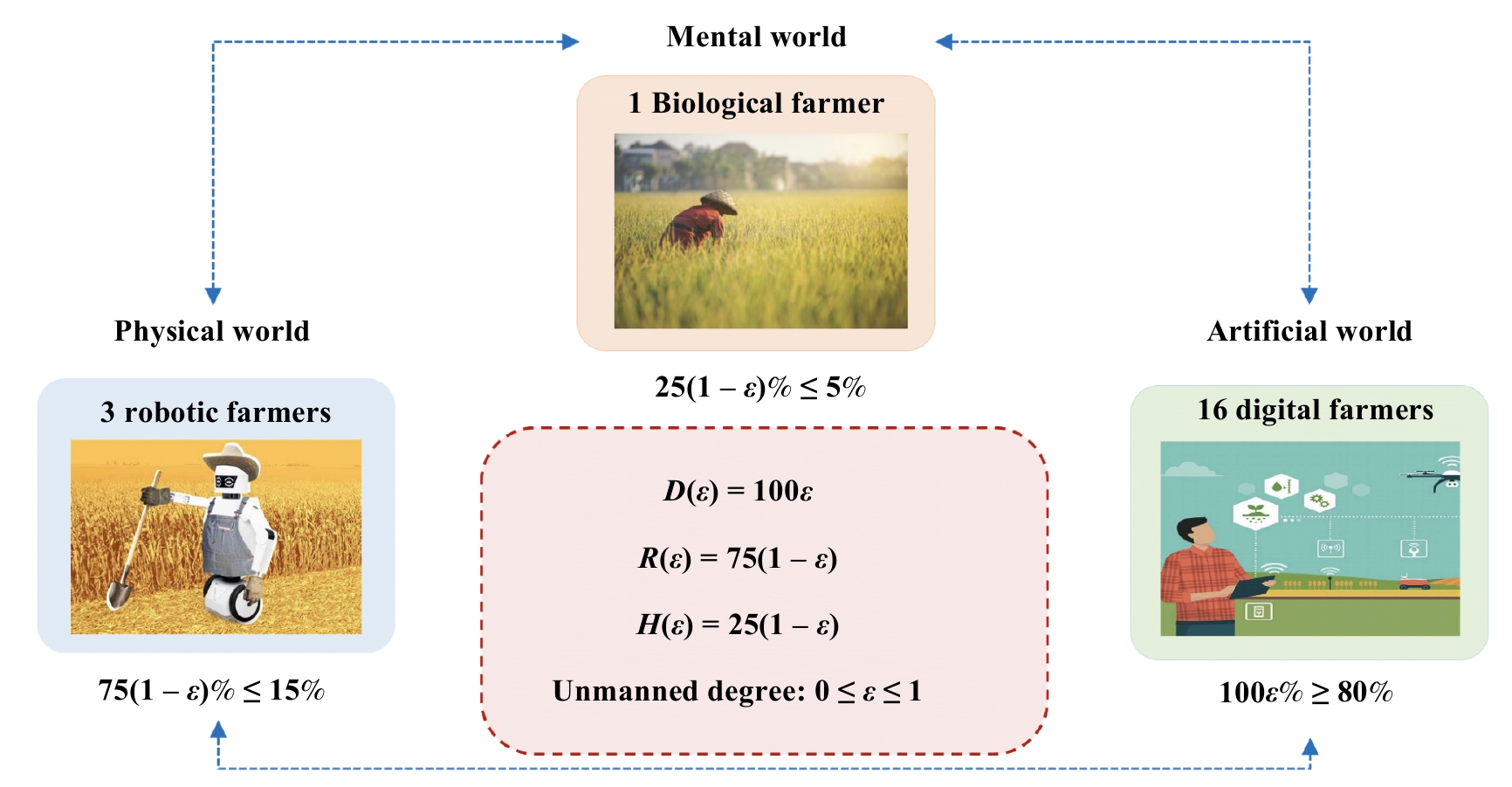
Plants sequester carbon through photosynthesis and provide primary productivity for the ecosystem. However, they also simultaneously consume water through transpiration, leading to a carbon-water balance relationship. Agricultural production can be regarded as a form of carbon sequestration behavior. From the perspective of the natural-social-economic complex ecosystem, excessive water usage in food production will aggravate regional water pressure for both domestic and industrial purposes. Hence, achieving a harmonious equilibrium between carbon and water resources during the food production process is a key scientific challenge for ensuring food security and sustainability.Digital intelligence (DI) and cyber-physical-social systems (CPSS) are emerging as the new research paradigms that are causing a substantial shift in the conventional thinking and methodologies across various scientific fields, including ecological science and sustainability studies. This paper outlines our recent efforts in using advanced technologies such as big data, artificial intelligence (AI), digital twins, metaverses, and parallel intelligence to model, analyze, and manage the intricate dynamics and equilibrium among plants, carbon, and water in arid and semi-arid ecosystems. It introduces the concept of the carbon-water balance and explores its management at three levels: the individual plant level, the community level, and the natural-social-economic complex ecosystem level. Additionally, we elucidate the significance of agricultural foundation models as fundamental technologies within this context. A case analysis of water usage shows that, given the limited availability of water resources in the context of the carbon-water balance, regional collaboration and optimized allocation have the potential to enhance the utilization efficiency of water resources in the river basin. A suggested approach is to consider the river basin as a unified entity and coordinate the relationship between the upstream, midstream and downstream areas. Furthermore, establishing mechanisms for water resource transfer and trade among different industries can be instrumental in maximizing the benefits derived from water resources. Finally, we envisage a future of agriculture characterized by the integration of digital, robotic and biological farming techniques. This vision aims to incorporate small tasks, big models, and deep intelligence into the regular ecological practices of intelligent agriculture.
Y. F. Wang, M. Z. Kang, Y. L. Liu, J. J. Li, K. Xue, X. J. Wang, J. Q. Du, Y. L. Tian, Q. H. Ni, and F.-Y. Wang, “Can digital intelligence and cyber-physical-social systems achieve global food security and sustainability?” IEEE/CAA J. Autom. Sinica, vol. 10, no. 11, pp. 2070–2080, Nov. 2023. doi: 10.1109/JAS.2023.123951.












 E-mail Alert
E-mail Alert