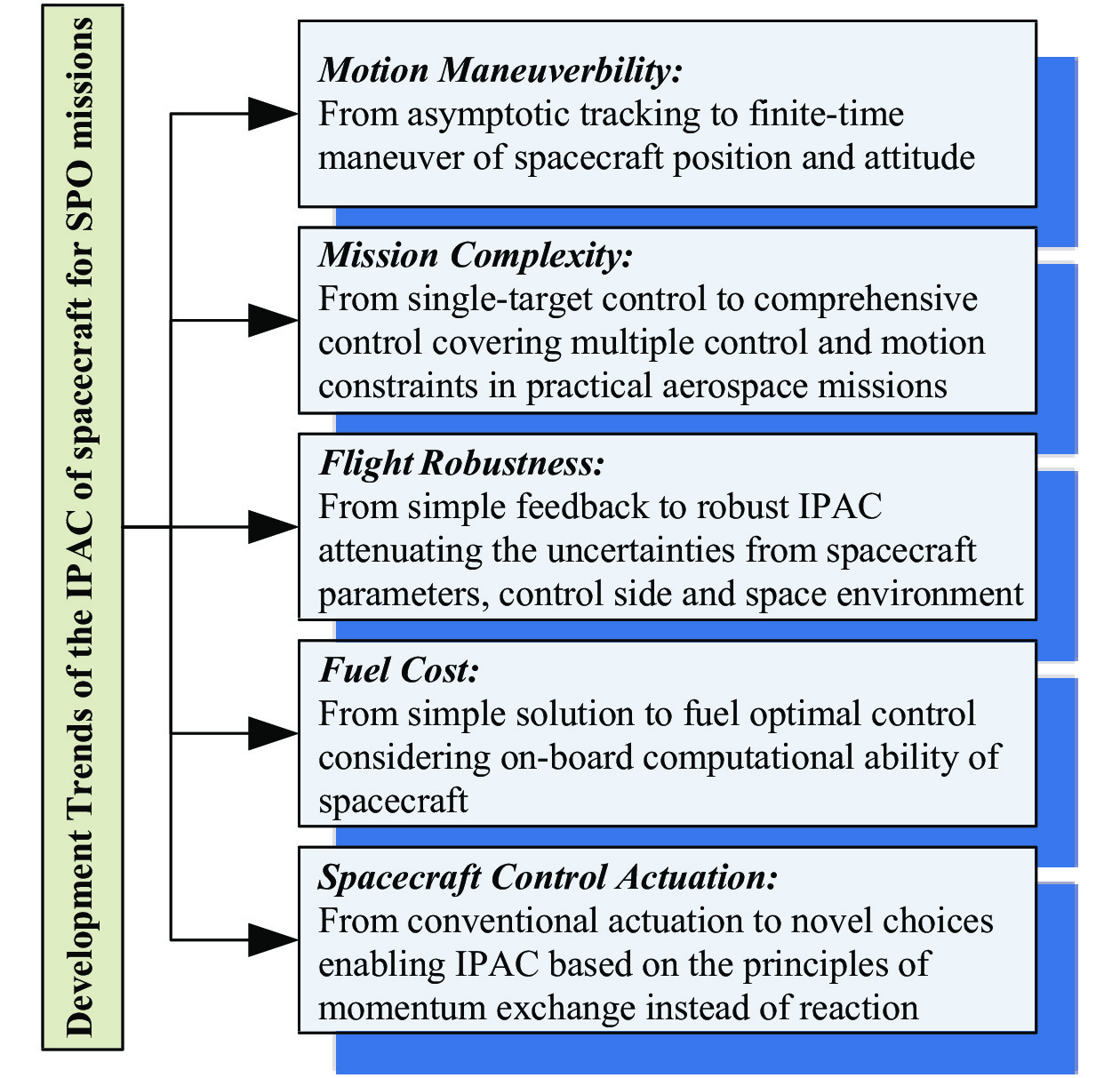
Inspired by the integrated guidance and control design for endo-atmospheric aircraft, the integrated position and attitude control of spacecraft has attracted increasing attention and gradually induced a wide variety of study results in last over two decades, fully incorporating control requirements and actuator characteristics of space missions. This paper presents a novel and comprehensive survey to the coupled position and attitude motions of spacecraft from the perspective of dynamics and control. To this end, a systematic analysis is firstly conducted in details to show the position and attitude mutual couplings of spacecraft. Particularly, in terms of the time discrepancy between spacecraft position and attitude motions, space missions can be categorized into two types: space proximity operation and space orbital maneuver. Based on this classification, the studies on the coupled dynamic modeling and the integrated control design for position and attitude motions of spacecraft are sequentially summarized and analyzed. On the one hand, various coupled position and dynamic formulations of spacecraft based on various mathematical tools are reviewed and compared from five aspects, including mission applicability, modeling simplicity, physical clearance, information matching and expansibility. On the other hand, the development of the integrated position and attitude control of spacecraft is analyzed for two space missions, and especially, five distinctive development trends are captured for space operation missions. Finally, insightful prospects on future development of the integrated position and attitude control technology of spacecraft are proposed, pointing out current primary technical issues and possible feasible solutions.











 E-mail Alert
E-mail Alert