A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 11
Volume 10
Issue 11
IEEE/CAA Journal of Automatica Sinica
| Citation: | H. X. Ma, M. Chen, and Q. X. Wu, “Disturbance observer-based safe tracking control for unmanned helicopters with partial state constraints and disturbances,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 11, pp. 2056–2069, Nov. 2023. doi: 10.1109/JAS.2022.105938

|
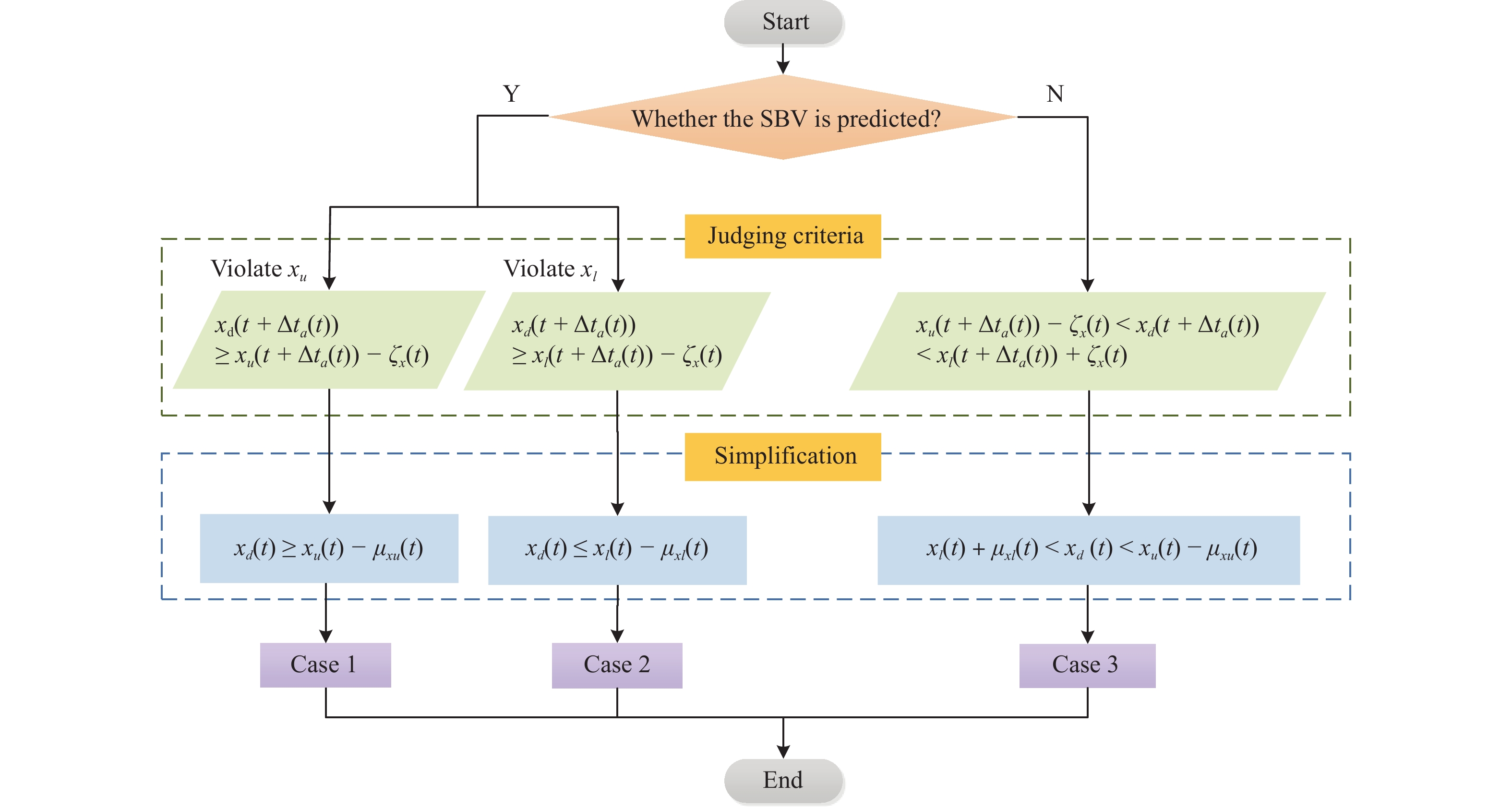
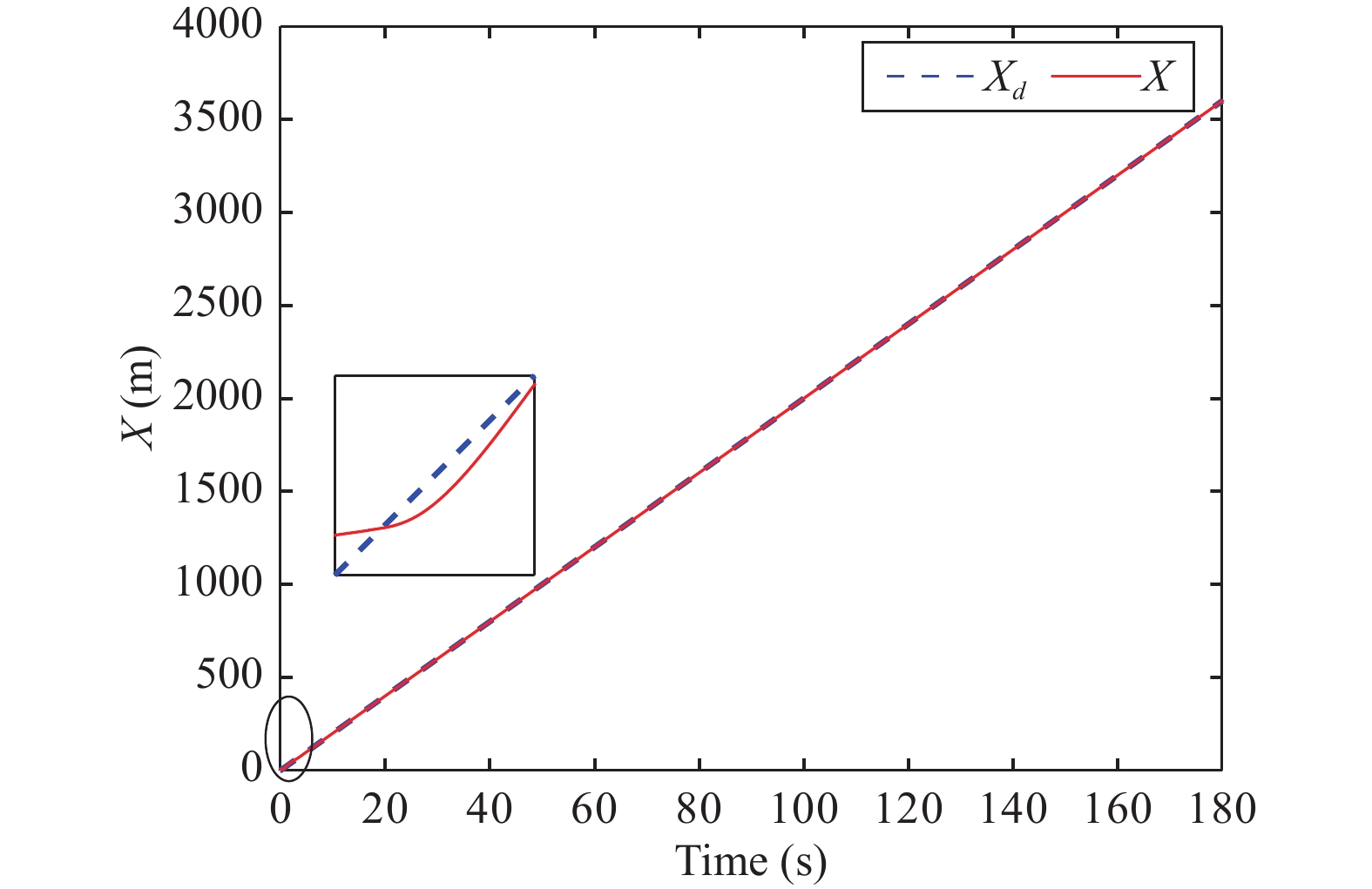
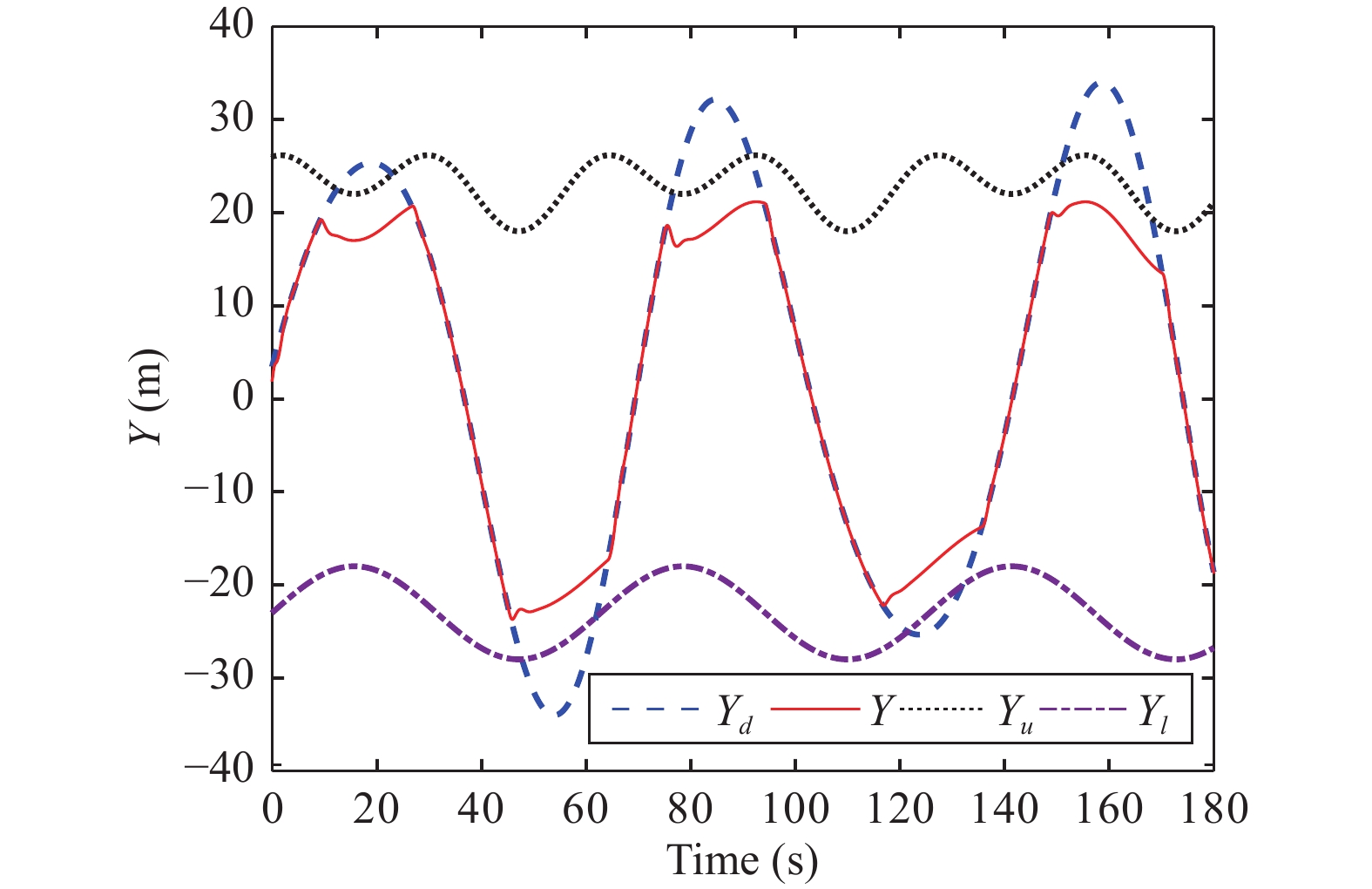
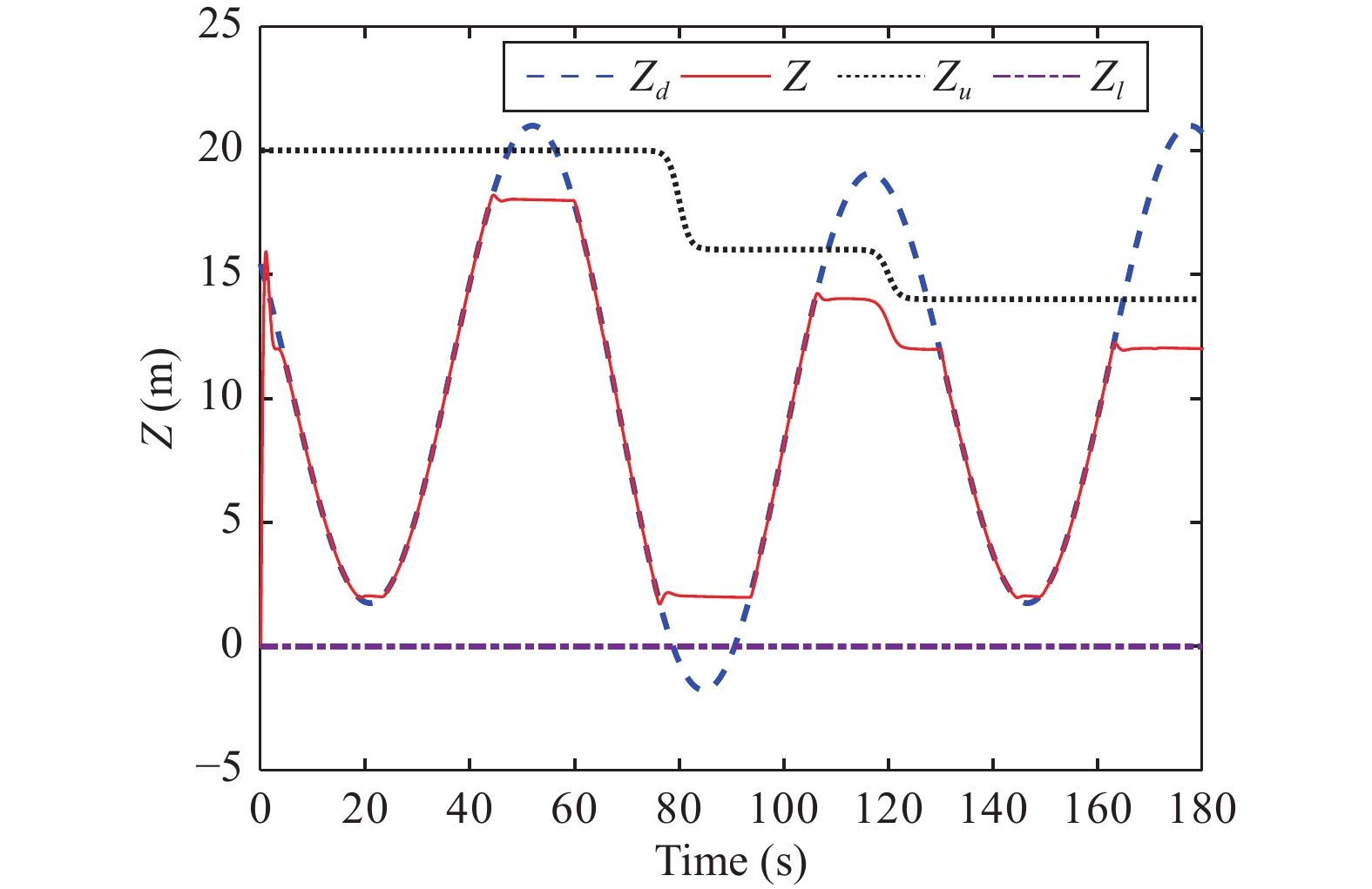
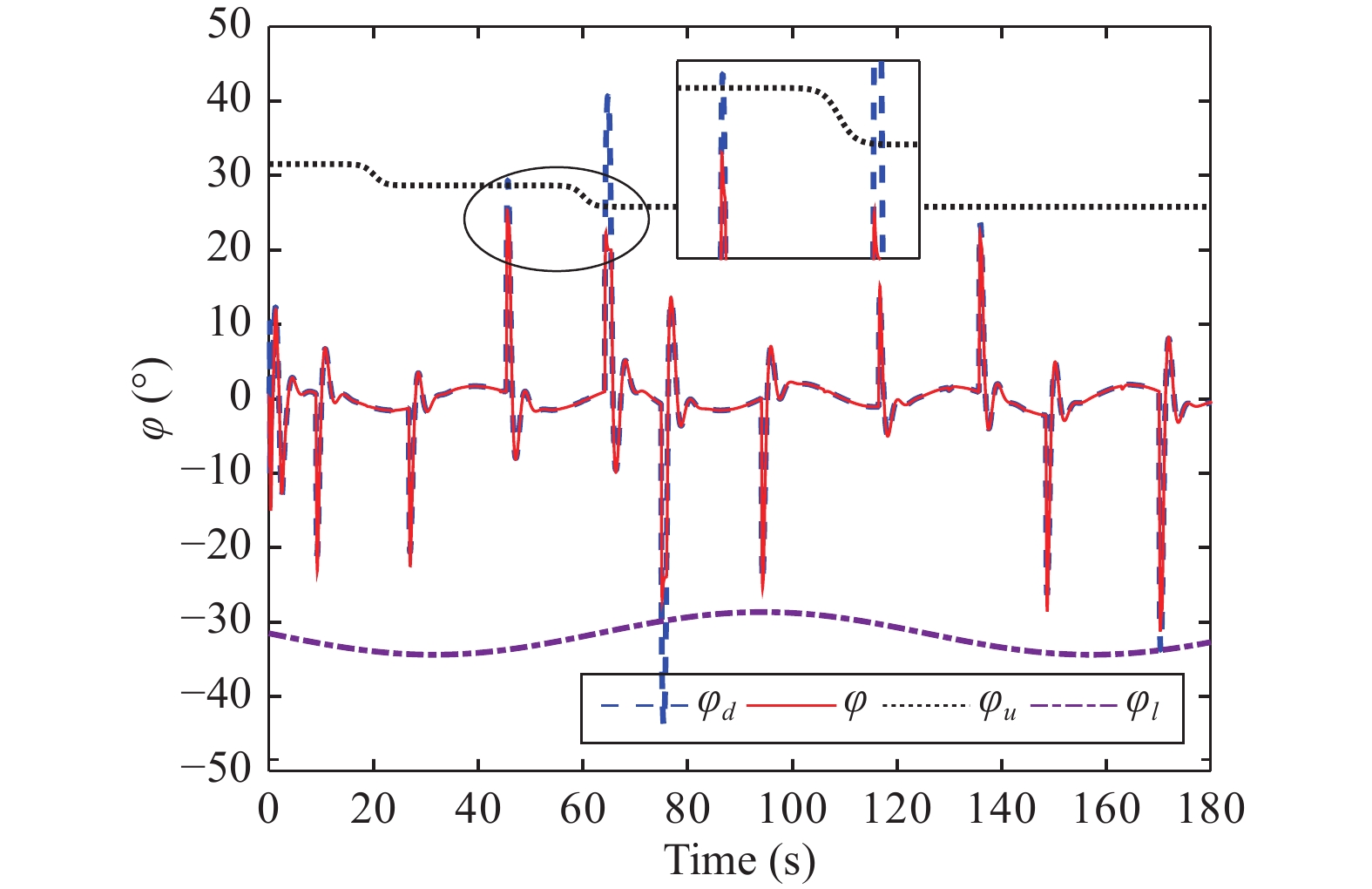
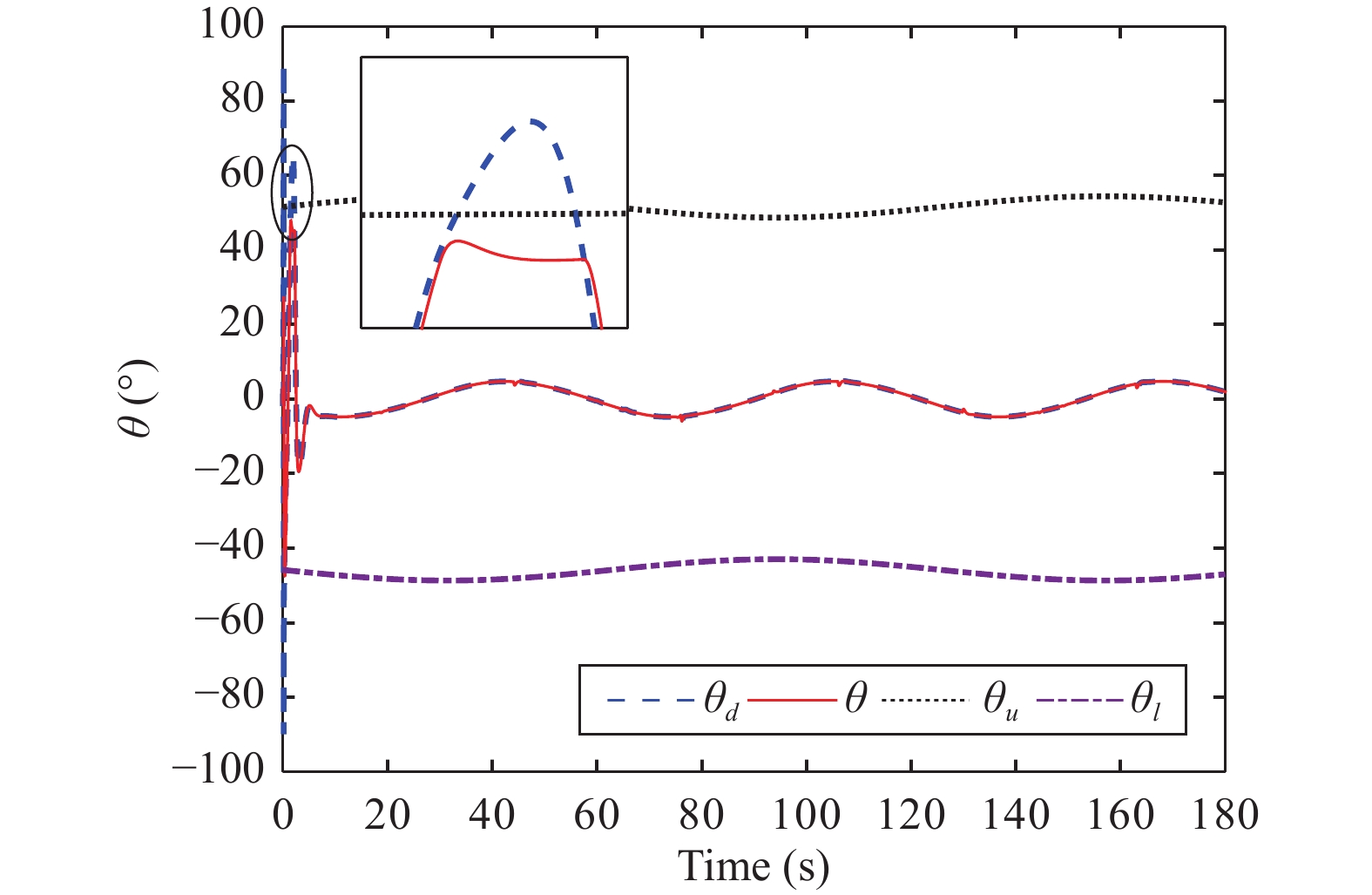
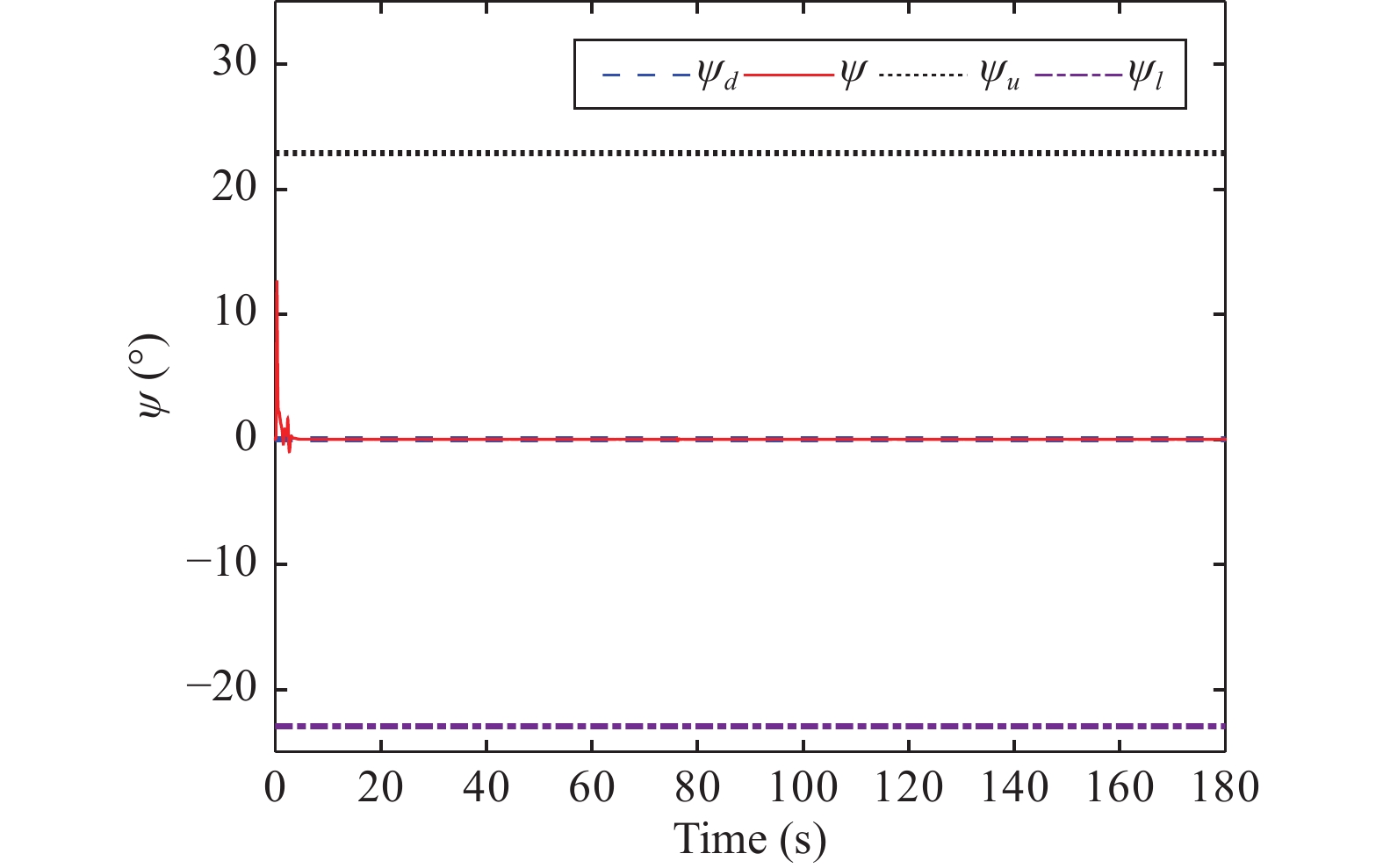
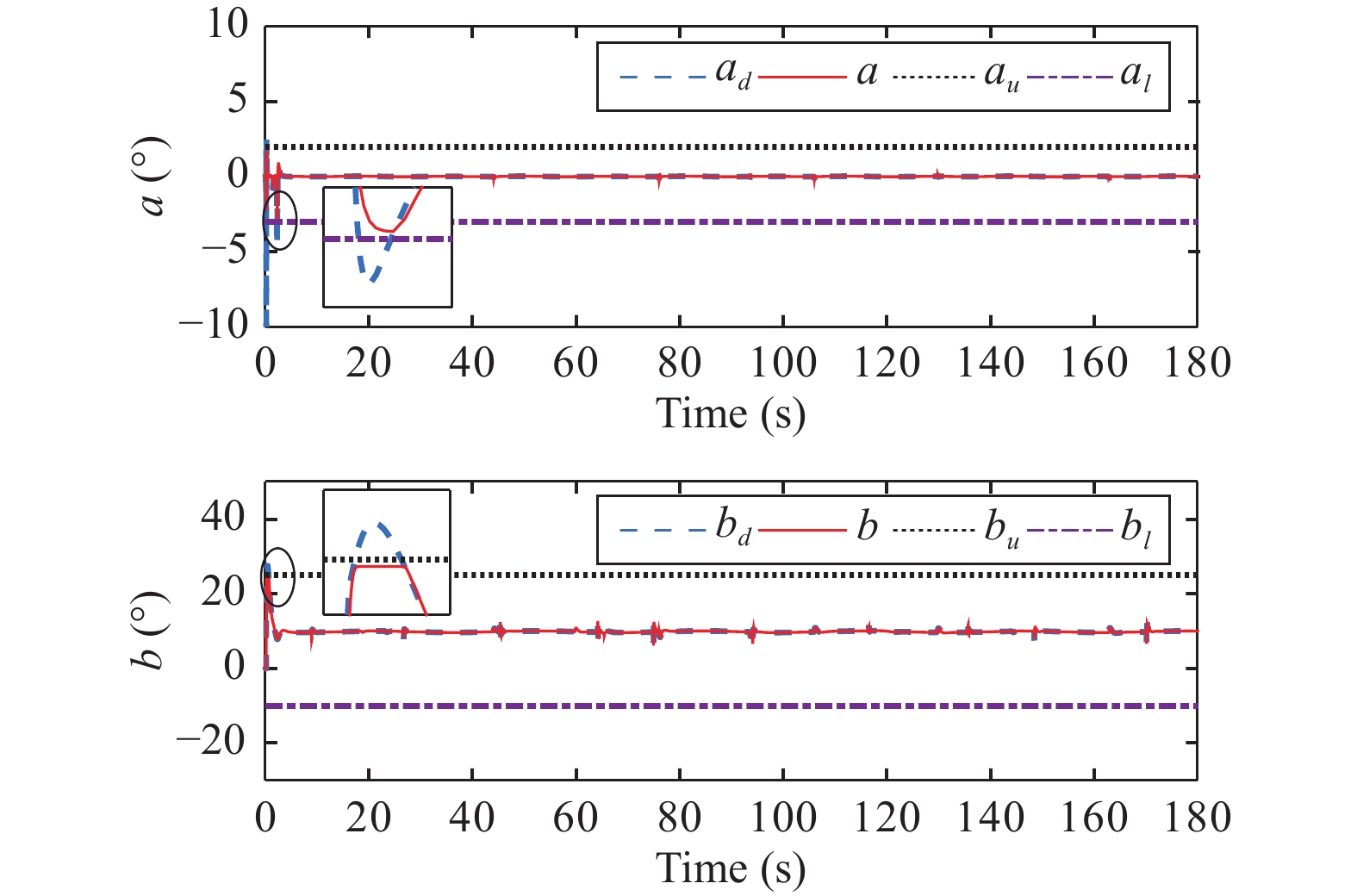
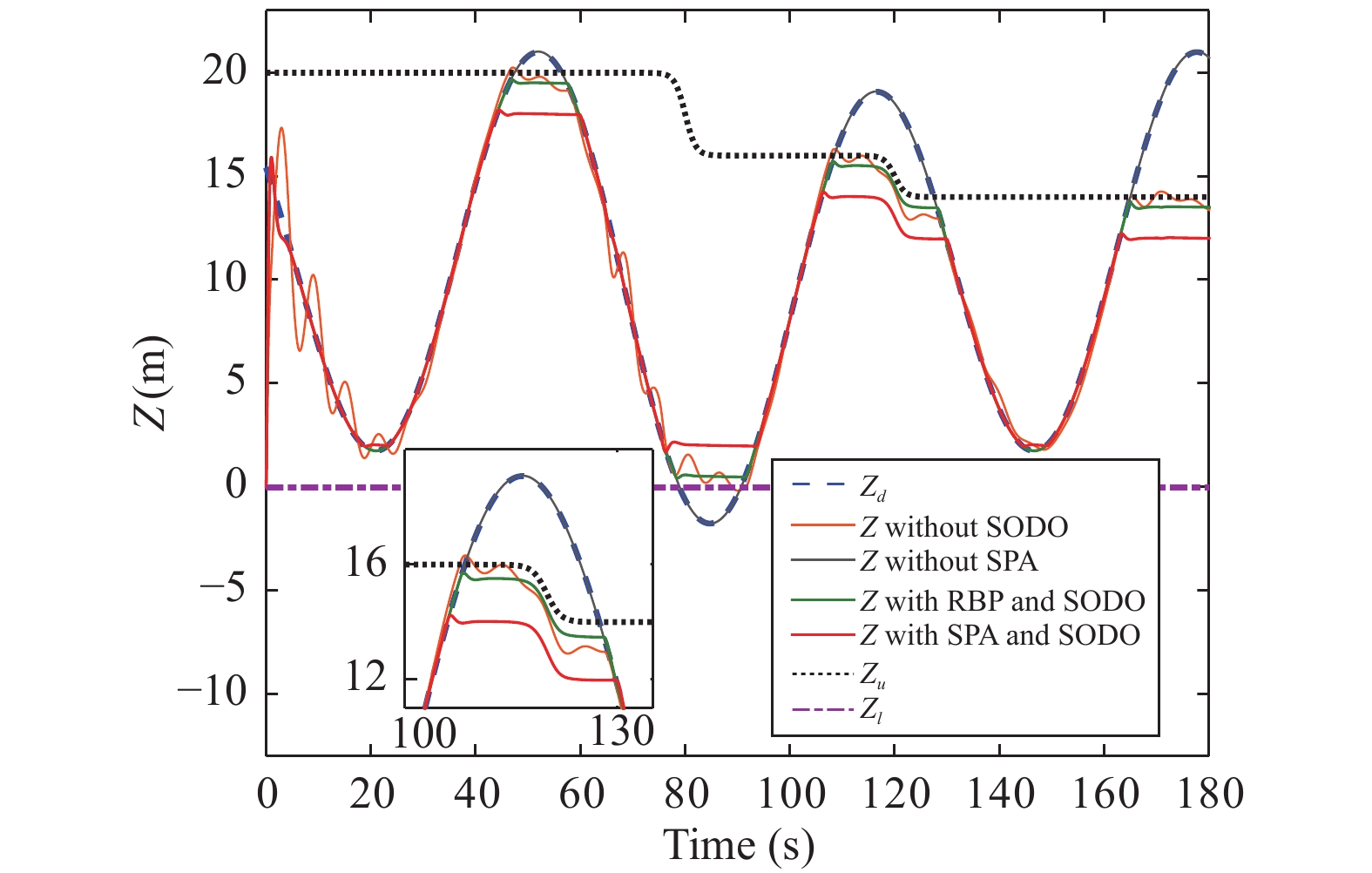
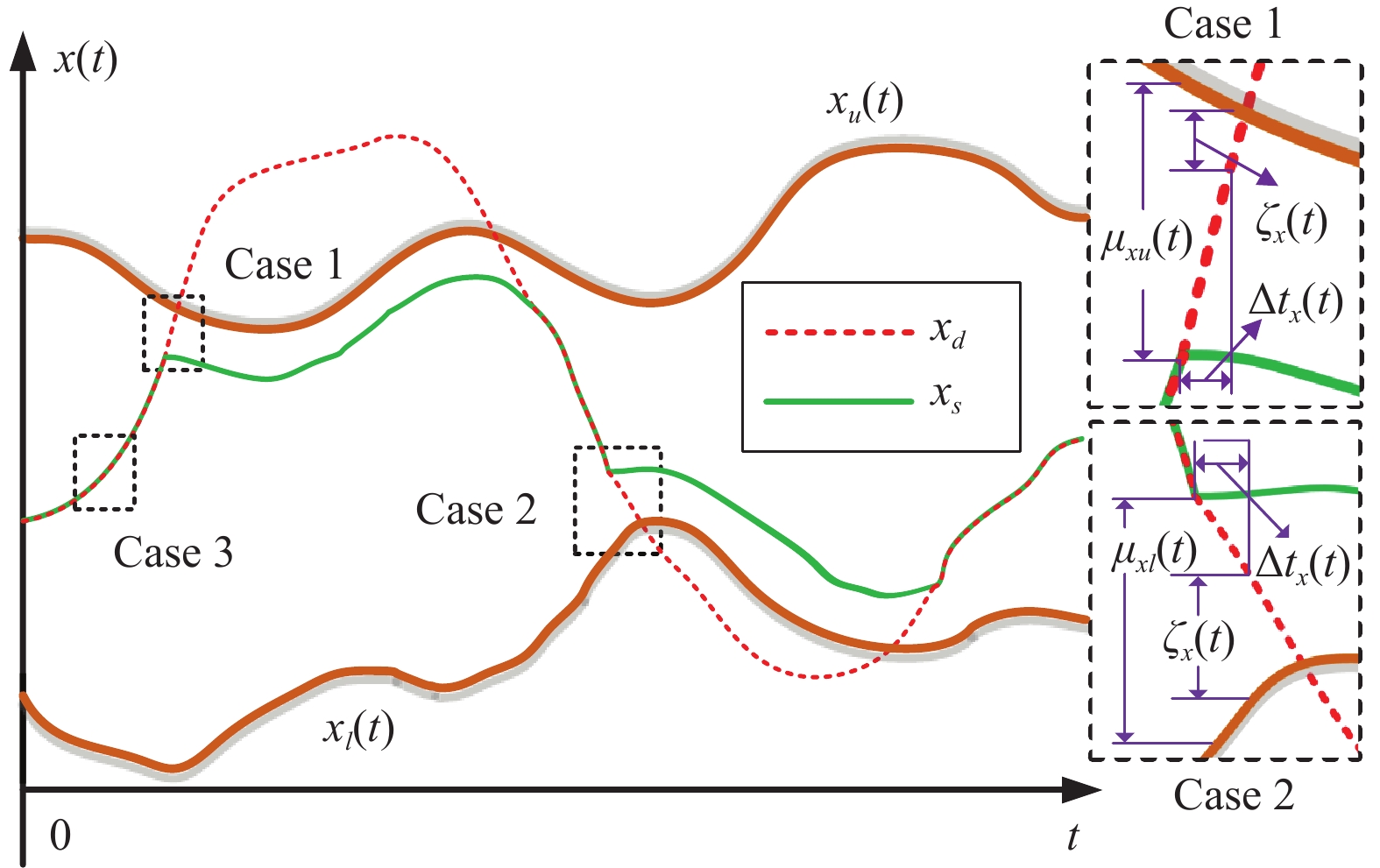
In this paper, a disturbance observer-based safe tracking control scheme is proposed for a medium-scale unmanned helicopter with rotor flapping dynamics in the presence of partial state constraints and unknown external disturbances. A safety protection algorithm is proposed to keep the constrained states within the given safe-set. A second-order disturbance observer technique is utilized to estimate the external disturbances. It is shown that the desired tracking performance of the controlled unmanned helicopter can be achieved with the application of the backstepping approach, dynamic surface control technique, and Lyapunov method. Finally, the availability of the proposed control scheme has been shown by simulation results.

| [1] |
Y. Liu, Z. Meng, Y. Zou, M. Cao, “Visual object tracking and servoing control of a NANO-scale quadrotor: System, algorithms, and experiments,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 344–360, Feb. 2021. doi: 10.1109/JAS.2020.1003530
|
| [2] |
Z. Zuo, C. Liu, Q.-L. Han, and J. J. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–614, Apr. 2022. doi: 10.1109/JAS.2022.105410
|
| [3] |
G. Cai, B. M. Chen, and T.H. Lee. Unmanned Rotorcraft Systems, Orlando, USA: Springer Science & Business Media, Jan. 2011.
|
| [4] |
O. Schneider, “Analysis of SPR measurements from HART II,” Aerospaceence &Technology, vol. 9, no. 5, pp. 409–420, Jul. 2005.
|
| [5] |
B. Mettler, M. B. Tischler, and T. Kanade, “System identification modeling of a small-scale unmanned rotorcraft for flight control design,” J. American Helicopter Society, vol. 47, no. 1, pp. 50–63, Jan. 2002. doi: 10.4050/JAHS.47.50
|
| [6] |
J. C. A. Vilchis, B. Brogliato, A. Dzul, and R. Lozano, “Nonlinear modeling and control of helicopters,” Automatica, vol. 39, no. 9, pp. 1583–1596, Sept. 2003. doi: 10.1016/S0005-1098(03)00168-7
|
| [7] |
Z. Han, C. Mou, S. Shao, and Q. Wu, “Improved artificial bee colony algorithm-based path planning of unmanned autonomous helicopter using multi-strategy evolutionary learning,” Aerospace Science and Technology, vol. 39, p. 107374, Mar. 2022.
|
| [8] |
C. Liu, W. H. Chen, and J. Andrews. “Tracking control of small-scale helicopters using explicit nonlinear MPC augmented with disturbance observers,” vol. 20, no. 3, pp. 258–268, Mar. 2012.
|
| [9] |
M. Chen, K. Yan, Q. Wu, and B. Jiang, “Extended state observer-based sliding mode fault-tolerant control for unmanned autonomous helicopter with wind gusts,” IET Control Theory and Applications, vol. 13, no. 10, pp. 1500–1513, Jul. 2019. doi: 10.1049/iet-cta.2018.5341
|
| [10] |
B. Xian, J. Guo, and Y. Zhang, “Adaptive backstepping tracking control of a 6-DOF unmanned helicopter,” IEEE/CAA J. Autom. Sinica, vol. 2, no. 1, pp. 19–24, Jan. 2015. doi: 10.1109/JAS.2015.7032902
|
| [11] |
D. Swaroop, J. K. Hedrick, P. P. Yip, and J. C. Gerdes, “Dynamic surface control for a class of nonlinear systems,” IEEE Trans. Automatic Control, vol. 45, no. 10, pp. 1893–1899, Oct. 2000. doi: 10.1109/TAC.2000.880994
|
| [12] |
Z. Peng, D. Wang, Z. Chen, X. Hu, and W. Lan, “Adaptive dynamic surface control for formations of autonomous surface vehicles with uncertain dynamics,” IEEE Trans. Control Systems Technology, vol. 21, no. 2, pp. 513–520, Mar. 2013. doi: 10.1109/TCST.2011.2181513
|
| [13] |
L. Song, H. Wang, and P. X. Liu, “Adaptive fuzzy dynamic surface control of flexible-joint robot systems with input saturation,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 97–106, Jan. 2019. doi: 10.1109/JAS.2019.1911330
|
| [14] |
S. Tong, Y. Li, F. Gang, and T. Li, “Observer-based adaptive fuzzy backstepping dynamic surface control for a class of MIMO nonlinear systems,” IEEE Trans. Systems Man &Cybernetics Part B, vol. 41, no. 4, pp. 1124–1135, Aug. 2011.
|
| [15] |
D. Hou, Q. Wang, and C. Dong, “Output feedback dynamic surface controller design for airbreathing hypersonic flight vehicle,” IEEE/CAA J. Autom. Sinica, vol. 2, no. 2, pp. 186–197, Apr. 2015. doi: 10.1109/JAS.2015.7081658
|
| [16] |
M. Chen, G. Tao, and B. Jiang, “Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation,” IEEE Trans. Neural Networks and Learning System, vol. 26, no. 9, pp. 2086–2097, Sept. 2015. doi: 10.1109/TNNLS.2014.2360933
|
| [17] |
W. Wang, K. Nonami, and Y. Ohira, “Model reference sliding mode control of small helicopter XRB based on vision,” Int. J. Advanced Robotic Systems, vol. 5, no. 3, pp. 235–242, Sept. 2008.
|
| [18] |
J. Q. Cui, S. Lai, X. Dong, P. Liu, B. M. Chen, and T. H. Lee, “Autonomous navigation of UAV in forest,” in Proc. Int. Conf. Unmanned Aircraft Systems, Berlin, Germany, Sep. 2014, pp. 726–733.
|
| [19] |
R. R. Nair and L. Behera, “Robust adaptive gain higher order sliding mode observer based control-constrained nonlinear model predictive control for spacecraft formation flying,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 367–381, Jan. 2018. doi: 10.1109/JAS.2016.7510253
|
| [20] |
K. P. Tee, S. S. Ge, and E. H. Tay, “Barrier Lyapunov functions for the control of output-constrained nonlinear systems,” Automatica, vol. 45, no. 4, pp. 918–927, Apr. 2009. doi: 10.1016/j.automatica.2008.11.017
|
| [21] |
Y. Li, Y. Liu, and S. Tong, “Observer-based neuro-adaptive optimized control of strict-feedback nonlinear systems with state constraints,” IEEE Trans. Neural Networks and Learning Systems, vol. 33, no. 7, pp. 3131–3145, Jan. 2021. doi: 10.1109/TNNLS.2021.3051030
|
| [22] |
T. Gao, Y. Liu, L. Liu, and D. Li, “Adaptive neural network-based control for a class of nonlinear pure-feedback systems with time-varying full state constraints,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 5, pp. 923–933, Sept. 2018. doi: 10.1109/JAS.2018.7511195
|
| [23] |
L. Chang and Y. Jia, “Adaptive control of a hose and drogue system with input nonlinearities and partial state constraints,” Int. J. Control Autom. and Systems, vol. 17, no. 4, pp. 2508–2520, Oct. 2019.
|
| [24] |
L. Wang, C. L. P. Chen, and H. Li, “Event-triggered adaptive control of saturated nonlinear systems with time-varying partial state constraints,” IEEE Trans. Cybernetics, vol. 50, no. 4, pp. 1485–1497, Apr. 2020. doi: 10.1109/TCYB.2018.2865499
|
| [25] |
M. Wang and A. Yang, “Dynamic learning from adaptive neural control of robot manipulators with prescribed performance,” IEEE Trans. Systems,Man,Cybernetics: Systems, vol. 47, no. 8, pp. 2244–2255, Aug. 2017. doi: 10.1109/TSMC.2016.2645942
|
| [26] |
S. Suzuki, T. Ishii, and Y. Aida, “Collision-free guidance control of small unmanned helicopter using nonlinear model predictive control,” SICE J. Control,Measurement,System Integration, vol. 7, no. 6, pp. 347–355, Nov. 2014. doi: 10.9746/jcmsi.7.347
|
| [27] |
Y. Zou and W. Huo, “Trajectory tracking controller for miniature unmanned helicopters with position and velocity constrains,” Control Theory &Applications, vol. 32, no. 10, pp. 1316–1324, Oct. 2015.
|
| [28] |
R. Li, M. Chen, Q. Wu, and J. Liu, “Robust adaptive tracking control for unmanned helicopter with constraints,” Int. J. Advanced Robotic Systems, vol. 14, no. 3, pp. 1–12, Jun. 2017.
|
| [29] |
S. Unnikrishnan, “Adaptive envelope protection methods for aircraft,” Ph.D. dissertation, Georgia Institute of Technology, Atlanta, USA, 2006.
|
| [30] |
H. Ma, M. Chen, H. Yang, Q. Wu, and M. Chadli, “Switched safe tracking control design for unmanned autonomous helicopter with disturbances,” Nonlinear Analysis Hybrid Systems, vol. 39, p. 100979, Feb. 2021. doi: 10.1016/j.nahs.2020.100979
|
| [31] |
D. Accardo, G. Fasano, and L. Forlenza, “Flight test of a radar-based tracking system for UAS sense and avoid,” IEEE Trans. Aerospace and Electronic Systems, vol. 49, no. 2, pp. 1139–1160, Apr. 2013. doi: 10.1109/TAES.2013.6494404
|
| [32] |
H. Hou and H. Andrews, “Cubic splines for image interpolation and digital filtering,” IEEE Trans. Acoustics,Speech,Signal Processing, vol. 26, no. 6, pp. 508–517, Dec. 1978. doi: 10.1109/TASSP.1978.1163154
|
| [33] |
R. G. Keys, “Cubic convolution interpolation for digital image processing,” IEEE Trans. Acoustics,Speech,Signal Processing, vol. 29, no. 6, pp. 1153–1160, Dec. 2003.
|
| [34] |
J.-Q. Han, “From PID to active disturbance rejection control,” IEEE Trans. Industrial Electronics, vol. 56, no. 3, pp. 900–906, Mar. 2009. doi: 10.1109/TIE.2008.2011621
|
| [35] |
Z. K. Su, H. L. Wang, P. Yao, Y. Huang, and Y. Qin, “Back-stepping based anti-disturbance flight controller with preview methodology for autonomous aerial refueling,” Aerospace Science and Technology, vol. 61, pp. 95–108, Feb. 2017. doi: 10.1016/j.ast.2016.11.028
|
| [36] |
B. Jiang, Q. K. Shen, and P. Shi, “Neural-networked adaptive tracking control for switched nonlinear pure-feedback systems under arbitrary switching,” Automatica, vol. 61, no. 10, pp. 119–125, Nov. 2015.
|
| [37] |
Y. Guo, B. Jiang, and Y. Zhang, “A novel robust attitude control for quadrotor aircraft subject to actuator faults and wind gusts,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 292–300, Jan. 2018. doi: 10.1109/JAS.2017.7510679
|
| [38] |
W. H. Chen, “Disturbance observer based control for nonlinear systems,” Mechatronics,IEEE/ASME Trans. Mechatronics, vol. 9, no. 4, pp. 706–710, Dec. 2004. doi: 10.1109/TMECH.2004.839034
|
| [39] |
X. Chen, S. Komada, and T. Fukuda, “Design of a nonlinear disturbance observer,” IEEE Trans. Industrial Electronics, vol. 47, no. 2, pp. 429–437, Apr. 2000. doi: 10.1109/41.836359
|
| [40] |
W. H. Chen, “Nonlinear disturbance observer-enhanced dynamic inversion control of missiles,” J. Guidance,Control,Dynamics, vol. 26, no. 1, pp. 161–166, Jan. 2003. doi: 10.2514/2.5027
|
| [41] |
M. Chen and W. H. Chen, “Sliding mode control for a class of uncertain nonlinear system based on disturbance observer,” Int. J. Adaptive Control and Signal Processing, vol. 24, no. 1, pp. 51–64, Jan. 2010.
|
| [42] |
Z. Gao and G. Guo, “Fixed-time sliding mode formation control of AUVs based on a disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 539–545, Mar. 2010.
|
| [43] |
J. Yang, S. Li, J. Su, and X. Yu, “Continuous nonsingular terminal sliding mode control for systems with mismatched disturbances,” Automatica, vol. 49, no. 7, pp. 2287–2291, Jul. 2013. doi: 10.1016/j.automatica.2013.03.026
|
| [44] |
J. Huang, M. Zhang, S. Ri, C. Xiong, Z. Li, and K. Yu, “High-order disturbance-observer-based sliding mode control for mobile wheeled inverted pendulum systems,” IEEE Trans. Industrial Electronics, vol. 67, no. 3, pp. 2030–2041, Mar. 2020. doi: 10.1109/TIE.2019.2903778
|
| [45] |
M. Chen, “Robust tracking control for self-balancing mobile robots using disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 3, pp. 458–465, Jul. 2017. doi: 10.1109/JAS.2017.7510544
|
Figures(14) / Tables(2)






 DownLoad:
DownLoad: