Yang Li,
Xiao Wang,
Zhifan He,
Ze Wang,
Ke Cheng,
Sanchuan Ding,
Yijing Fan,
Xiaotao Li,
Yawen Niu,
Shanpeng Xiao,
Zhenqi Hao,
Bin Gao,
Huaqiang Wu
2024, 11(6): 1438-1446.
doi: 10.1109/JAS.2024.124422
Abstract:
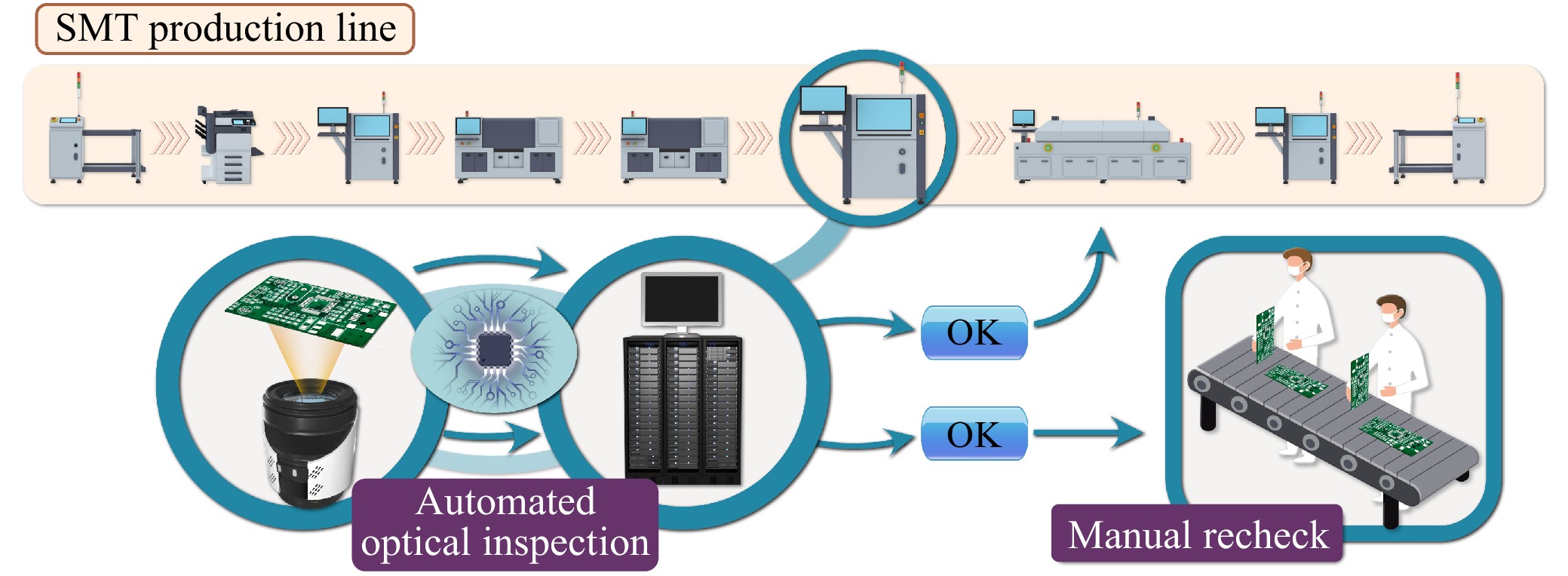
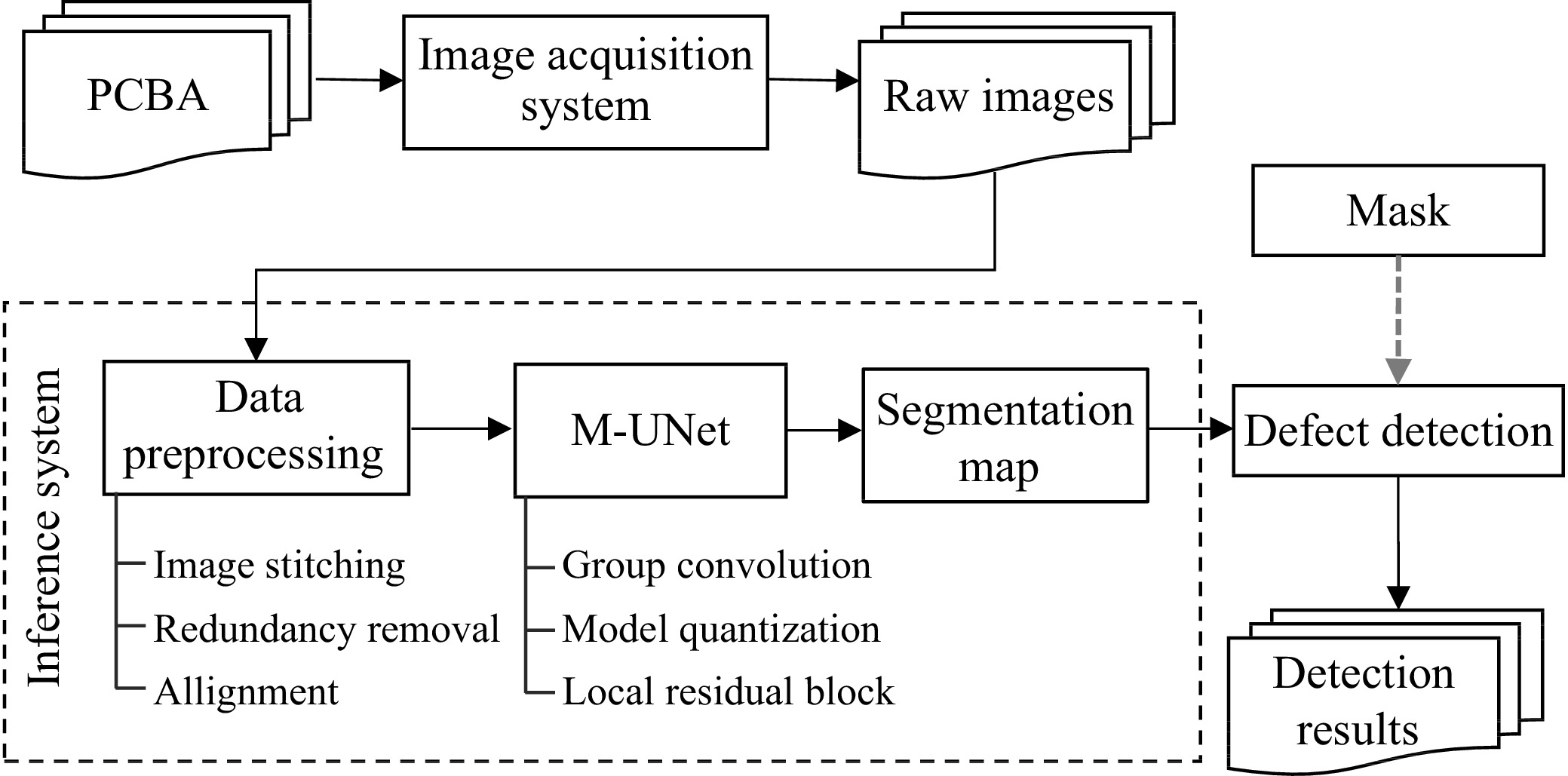
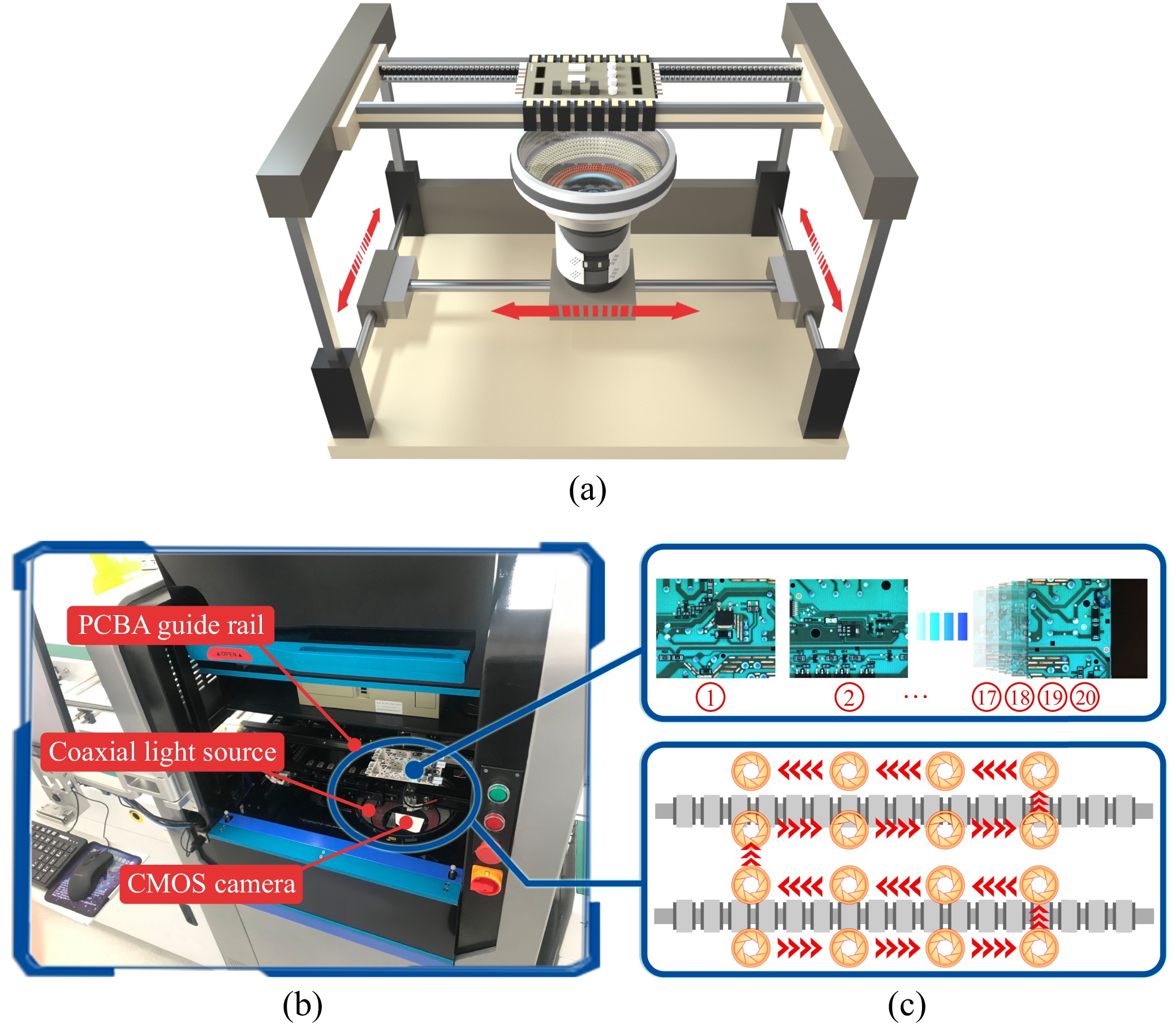
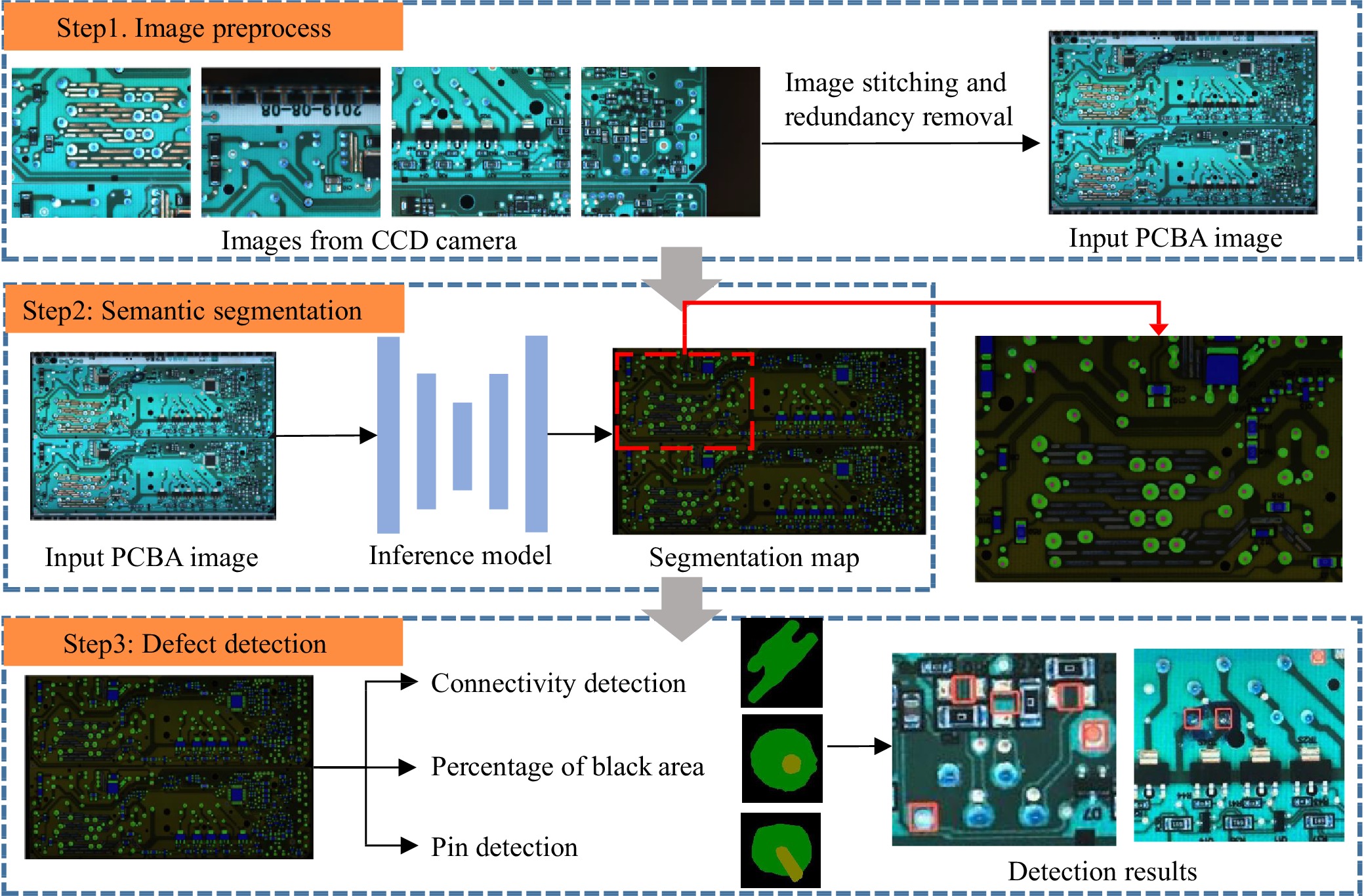
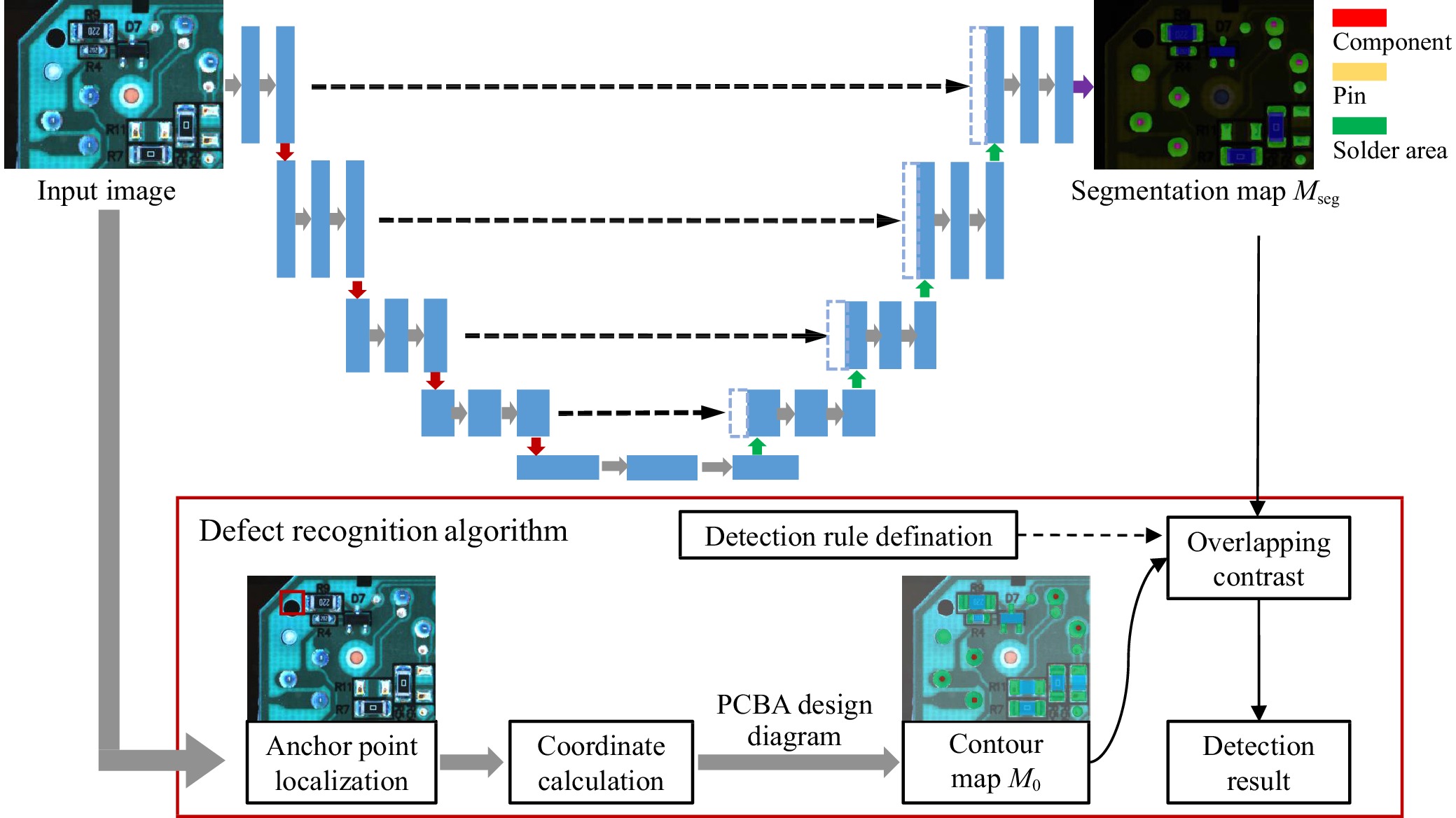
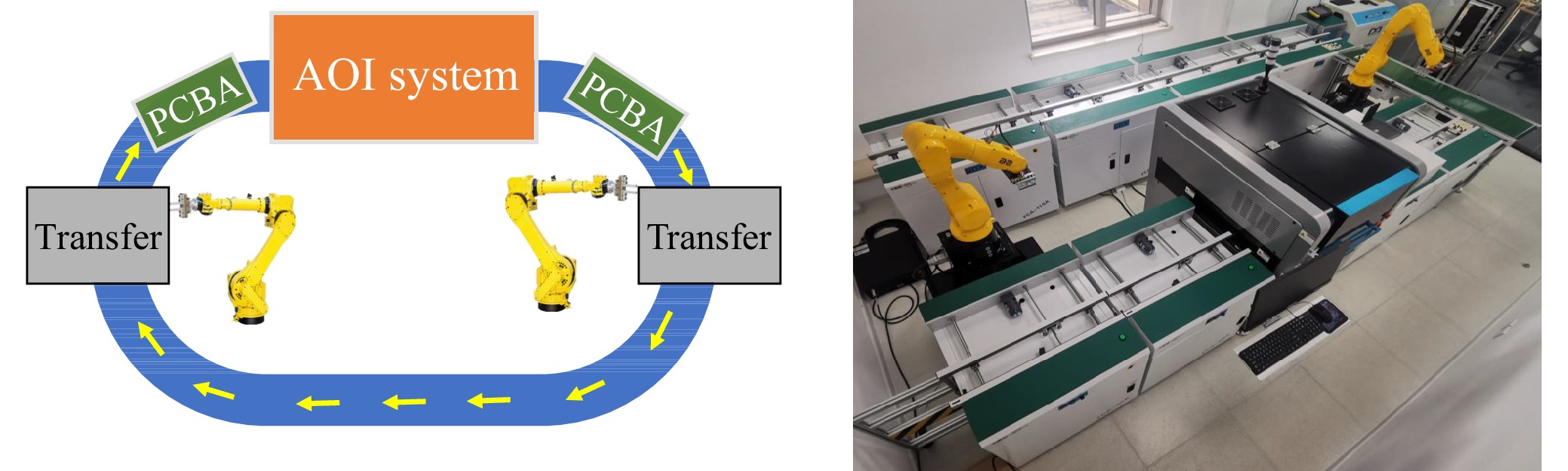
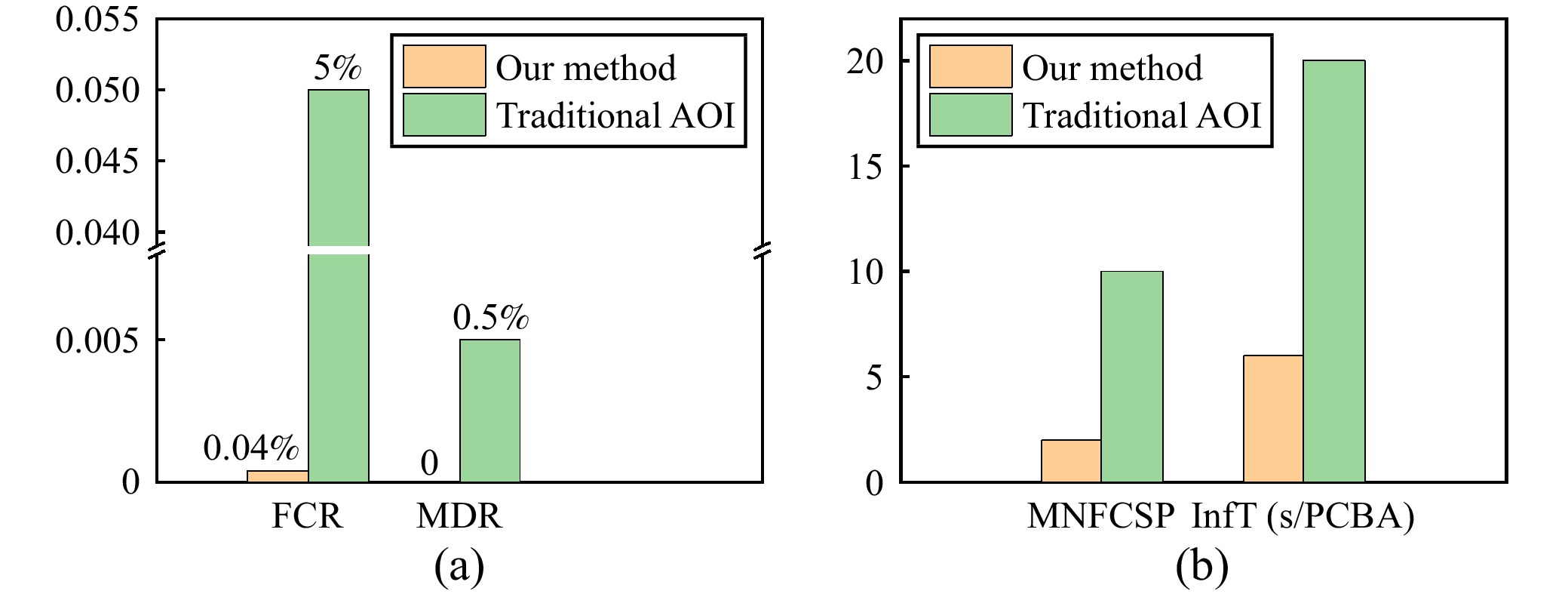
Automated optical inspection (AOI) is a significant process in printed circuit board assembly (PCBA) production lines which aims to detect tiny defects in PCBAs. Existing AOI equipment has several deficiencies including low throughput, large computation cost, high latency, and poor flexibility, which limits the efficiency of online PCBA inspection. In this paper, a novel PCBA defect detection method based on a lightweight deep convolution neural network is proposed. In this method, the semantic segmentation model is combined with a rule-based defect recognition algorithm to build up a defect detection framework. To improve the performance of the model, extensive real PCBA images are collected from production lines as datasets. Some optimization methods have been applied in the model according to production demand and enable integration in lightweight computing devices. Experiment results show that the production line using our method realizes a throughput more than three times higher than traditional methods. Our method can be integrated into a lightweight inference system and promote the flexibility of AOI. The proposed method builds up a general paradigm and excellent example for model design and optimization oriented towards industrial requirements.
Y. Li, X. Wang, Z. He, Z. Wang, K. Cheng, S. Ding, Y. Fan, X. Li, Y. Niu, S. Xiao, Z. Hao, B. Gao, and H. Wu, “Industry-oriented detection method of PCBA defects using semantic segmentation models,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 6, pp. 1438–1446, Jun. 2024. doi: 10.1109/JAS.2024.124422.












 E-mail Alert
E-mail Alert


