2022, 9(9): 1543-1560.
doi: 10.1109/JAS.2022.105671
Abstract:
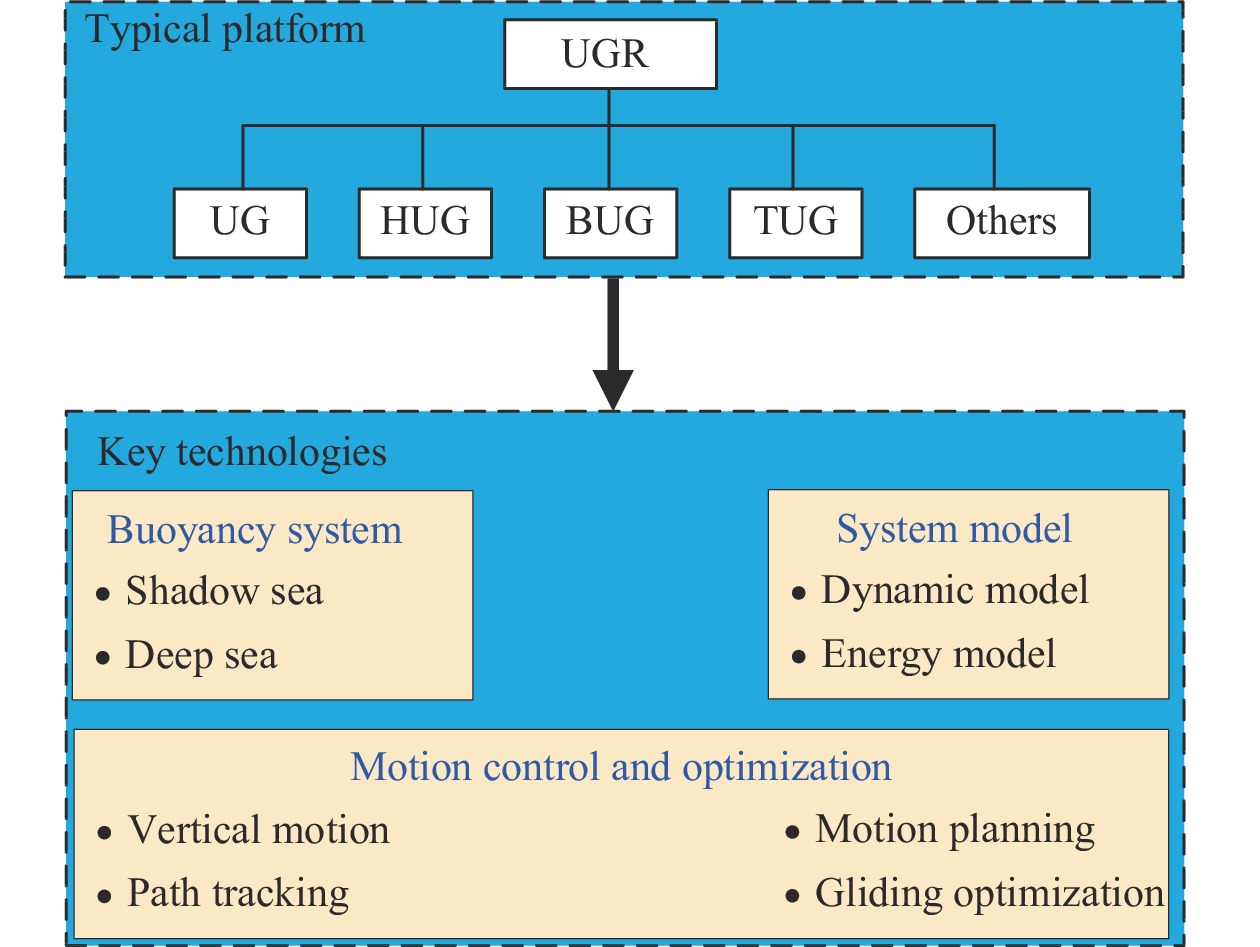
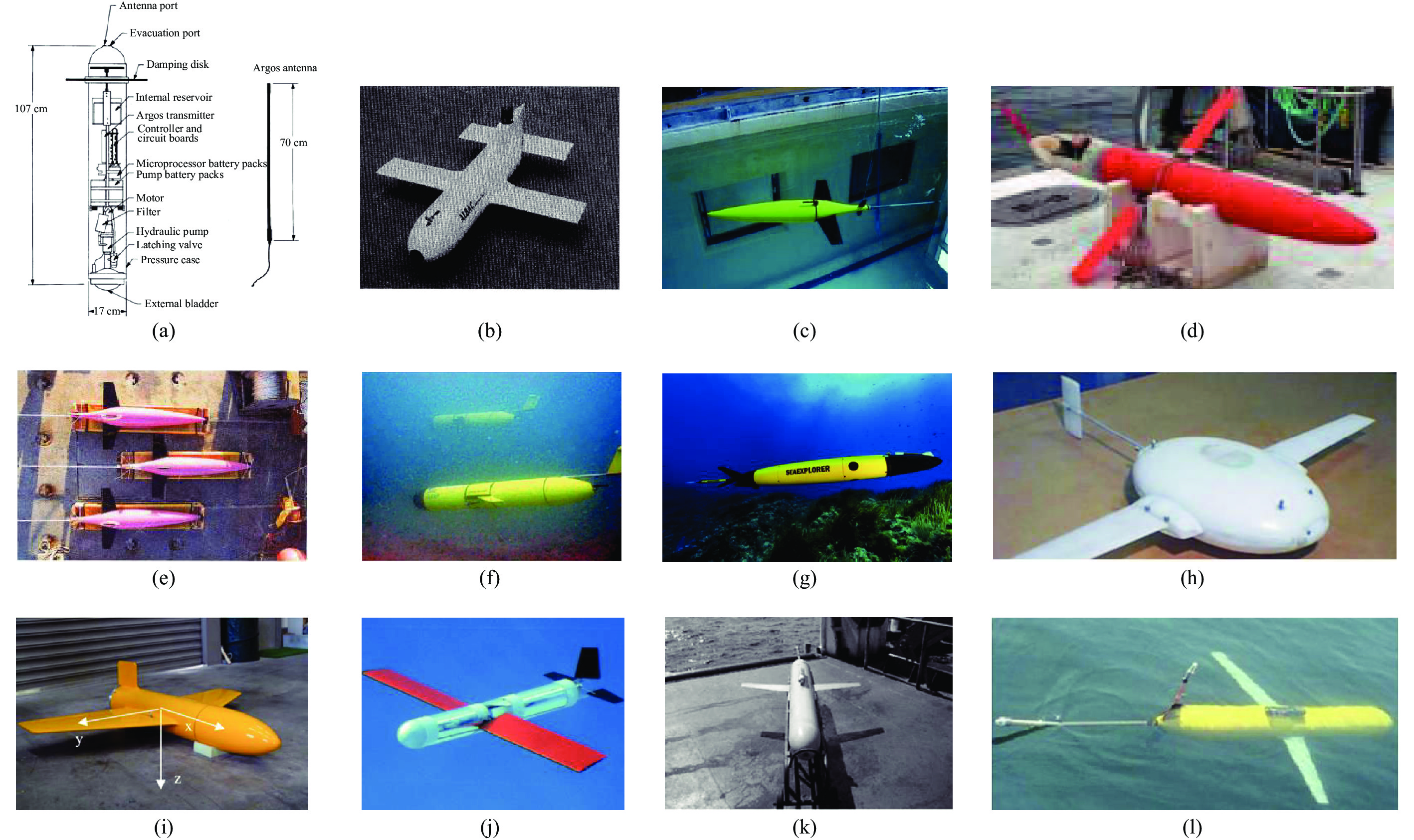
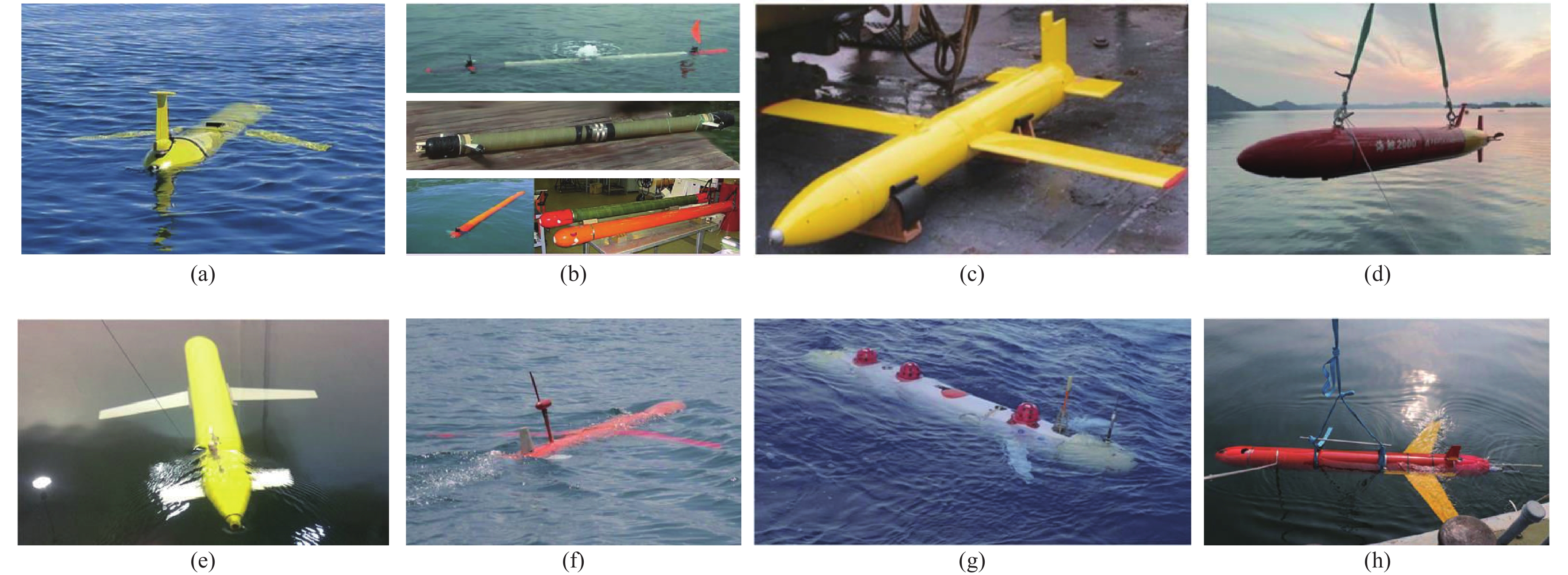
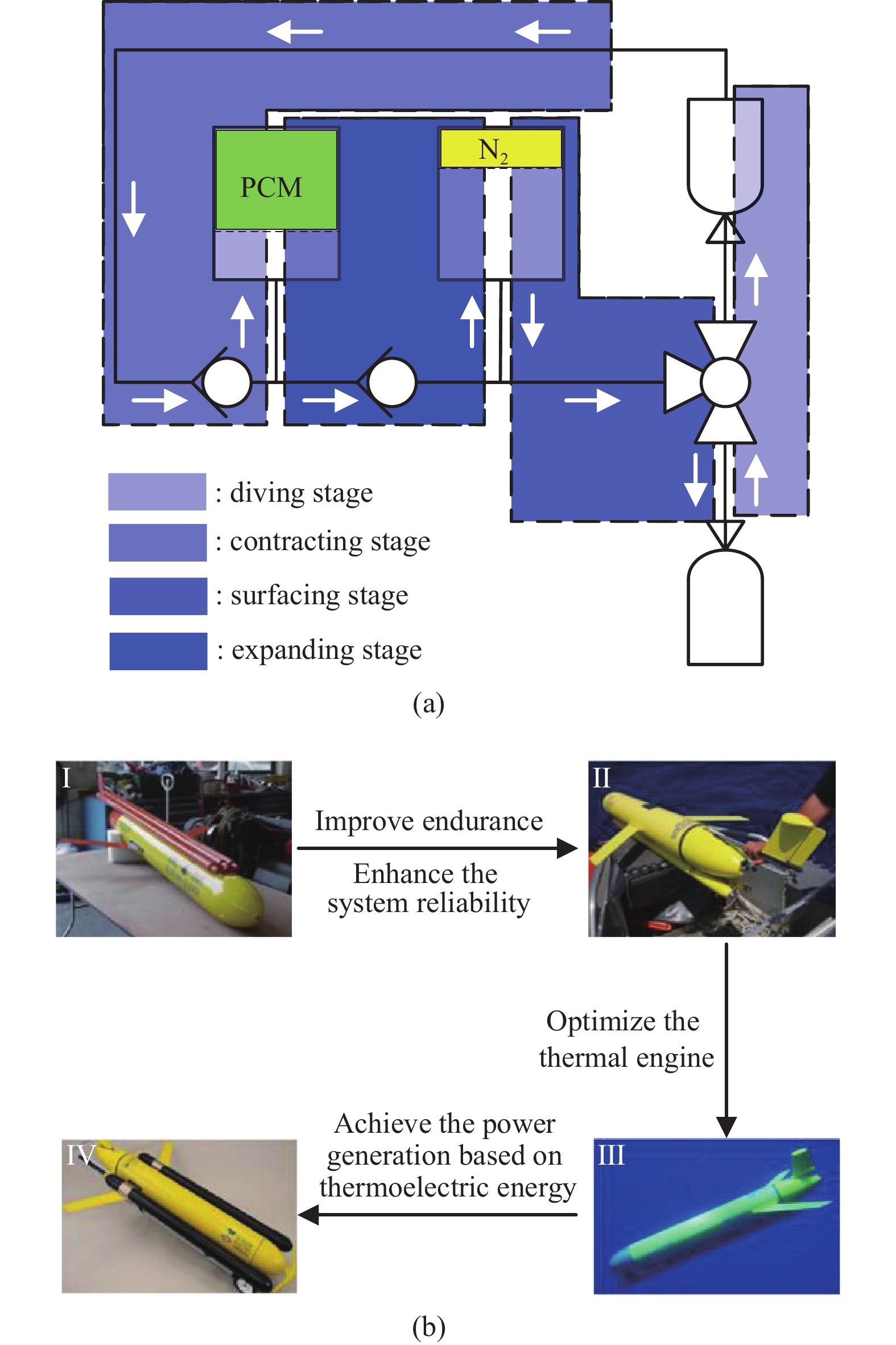
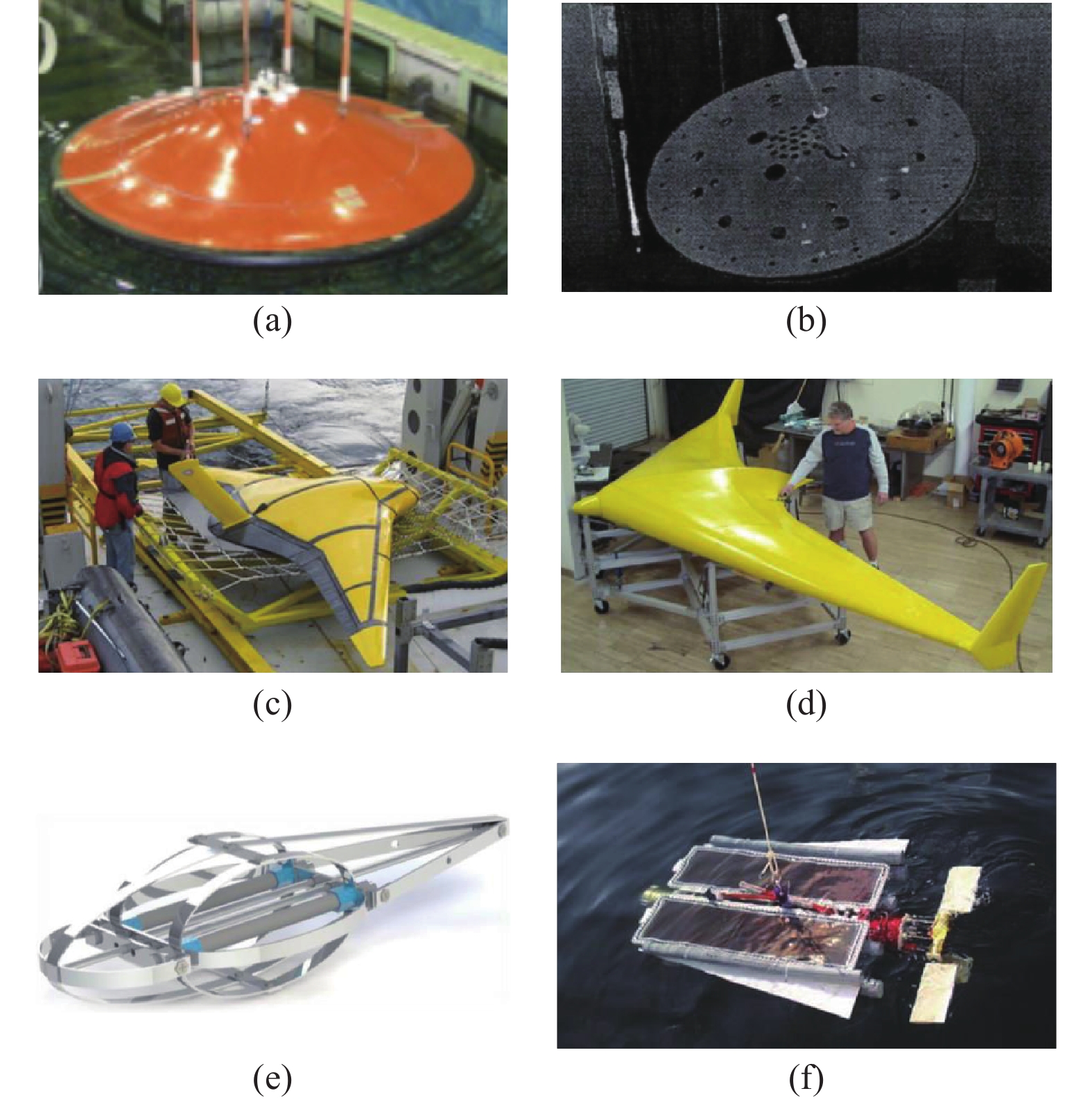
As one of the most effective vehicles for ocean development and exploration, underwater gliding robots (UGRs) have the unique characteristics of low energy consumption and strong endurance. Moreover, by borrowing the motion principles of current underwater robots, a variety of novel UGRs have emerged with improving their maneuverability, concealment, and environmental friendliness, which significantly broadens the ocean applications. In this paper, we provide a comprehensive review of underwater gliding robots, including prototype design and their key technologies. From the perspective of motion characteristics, we categorize the underwater gliding robots in terms of traditional underwater gliders (UGs), hybrid-driven UGs, bio-inspired UGs, thermal UGs, and others. Correspondingly, their buoyancy driven system, dynamic and energy model, and motion control are concluded with detailed analysis. Finally, we have discussed the current critical issues and future development. This review offers valuable insight into the development of next-generation underwater robots well-suited for various oceanic applications, and aims to gain more attention of researchers and engineers to this growing field.
J. Wang, Z. X. Wu, H. J. Dong, M. Tan, and J. Z. Yu, “Development and control of underwater gliding robots: A review,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 9, pp. 1543–1560, Sept. 2022. doi: 10.1109/JAS.2022.105671.

















 E-mail Alert
E-mail Alert