2021, 8(3): 565-581.
doi: 10.1109/JAS.2021.1003871
Abstract:
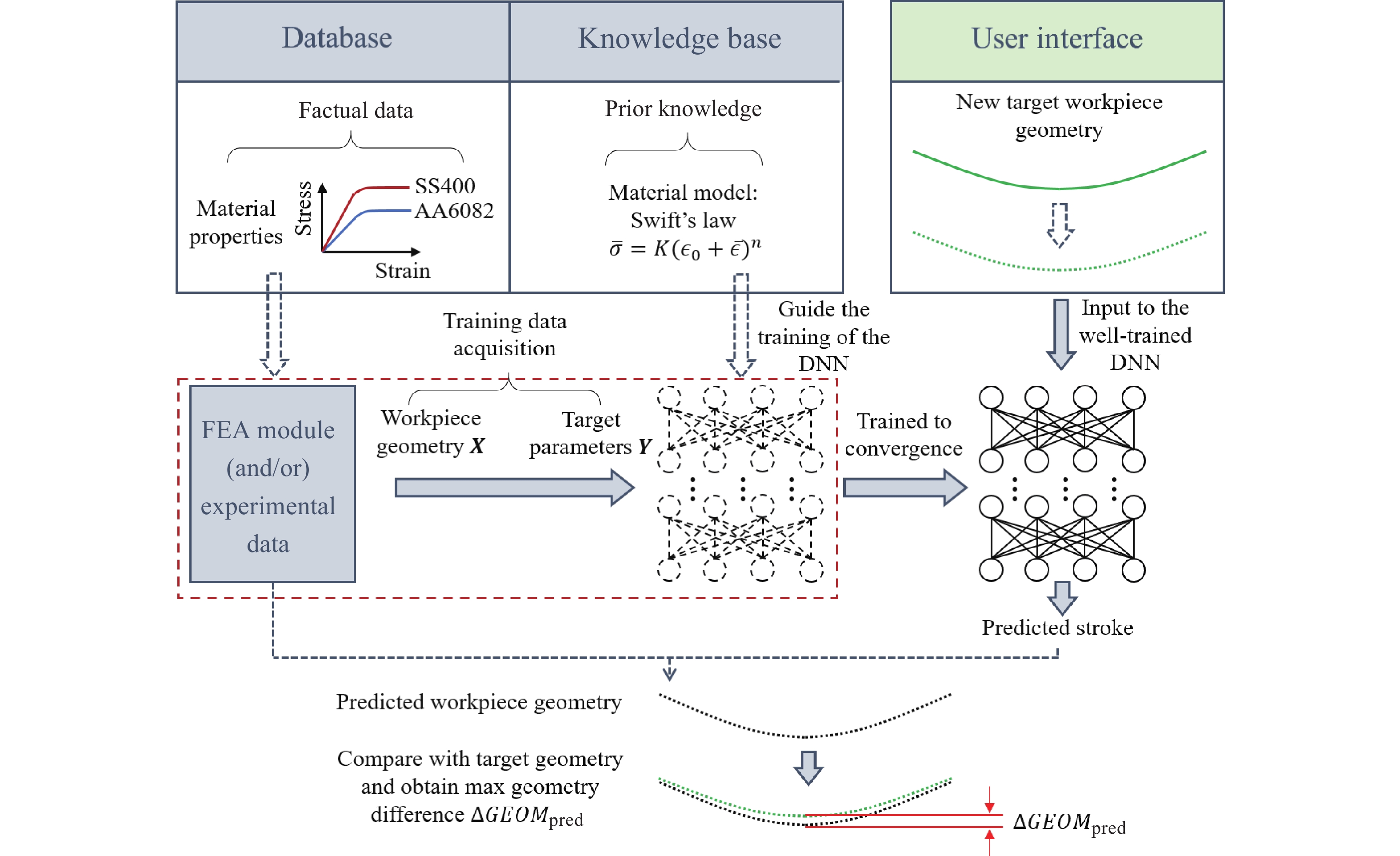
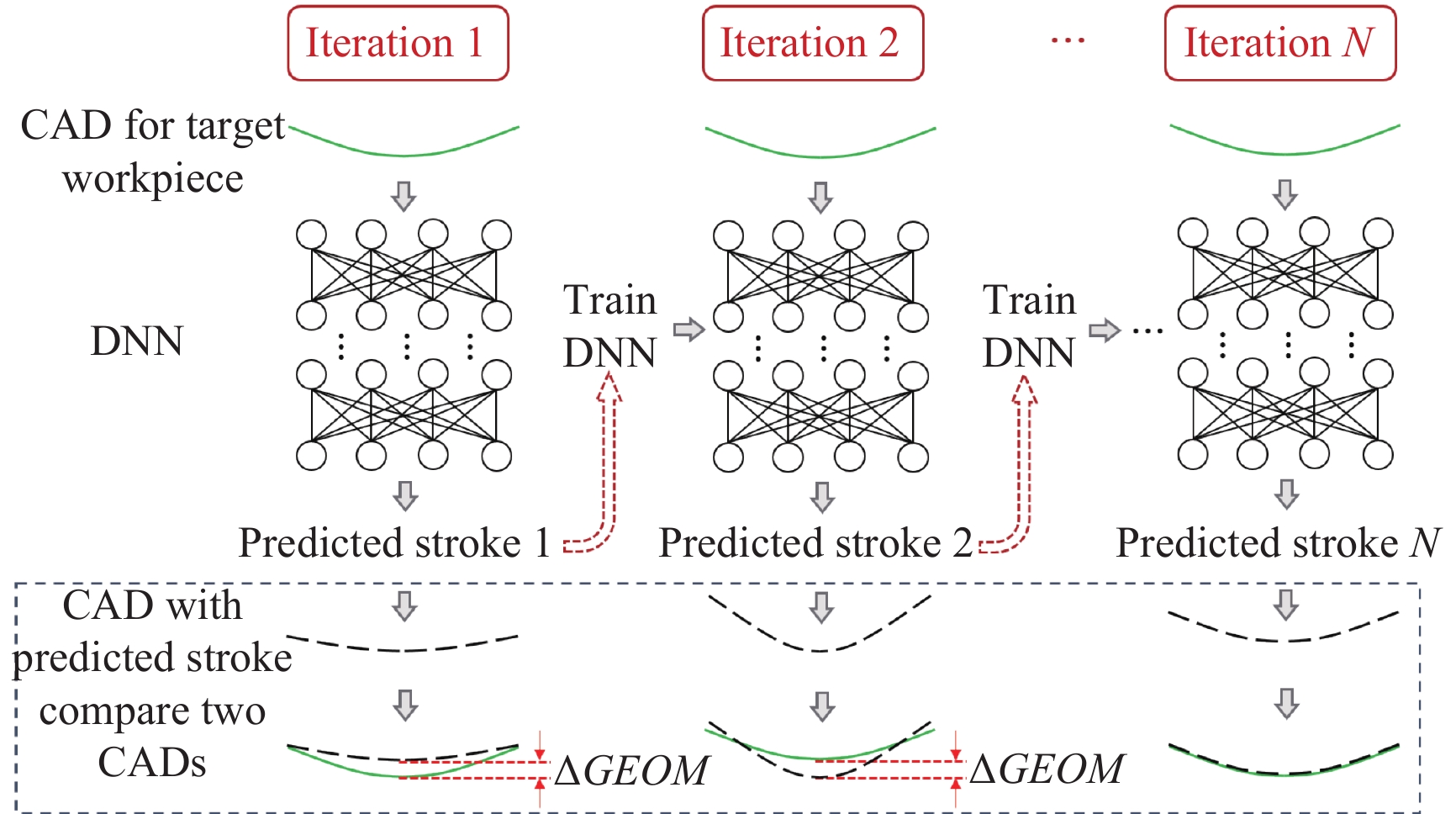
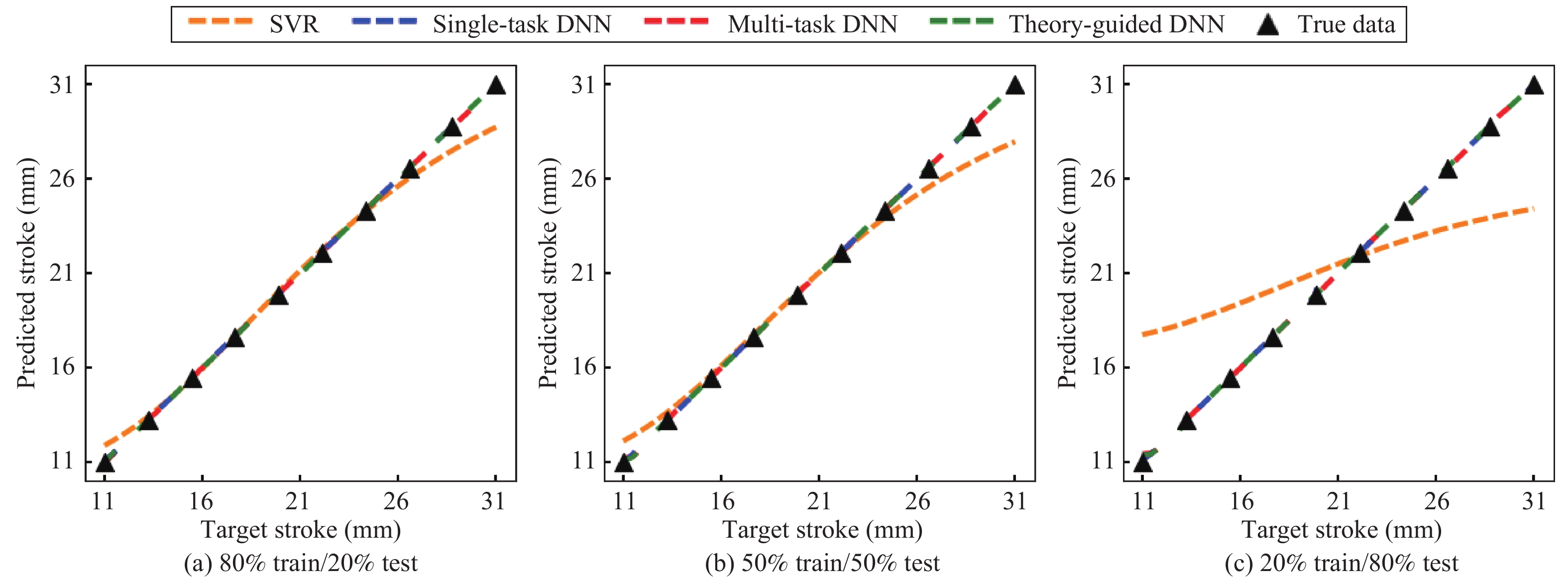
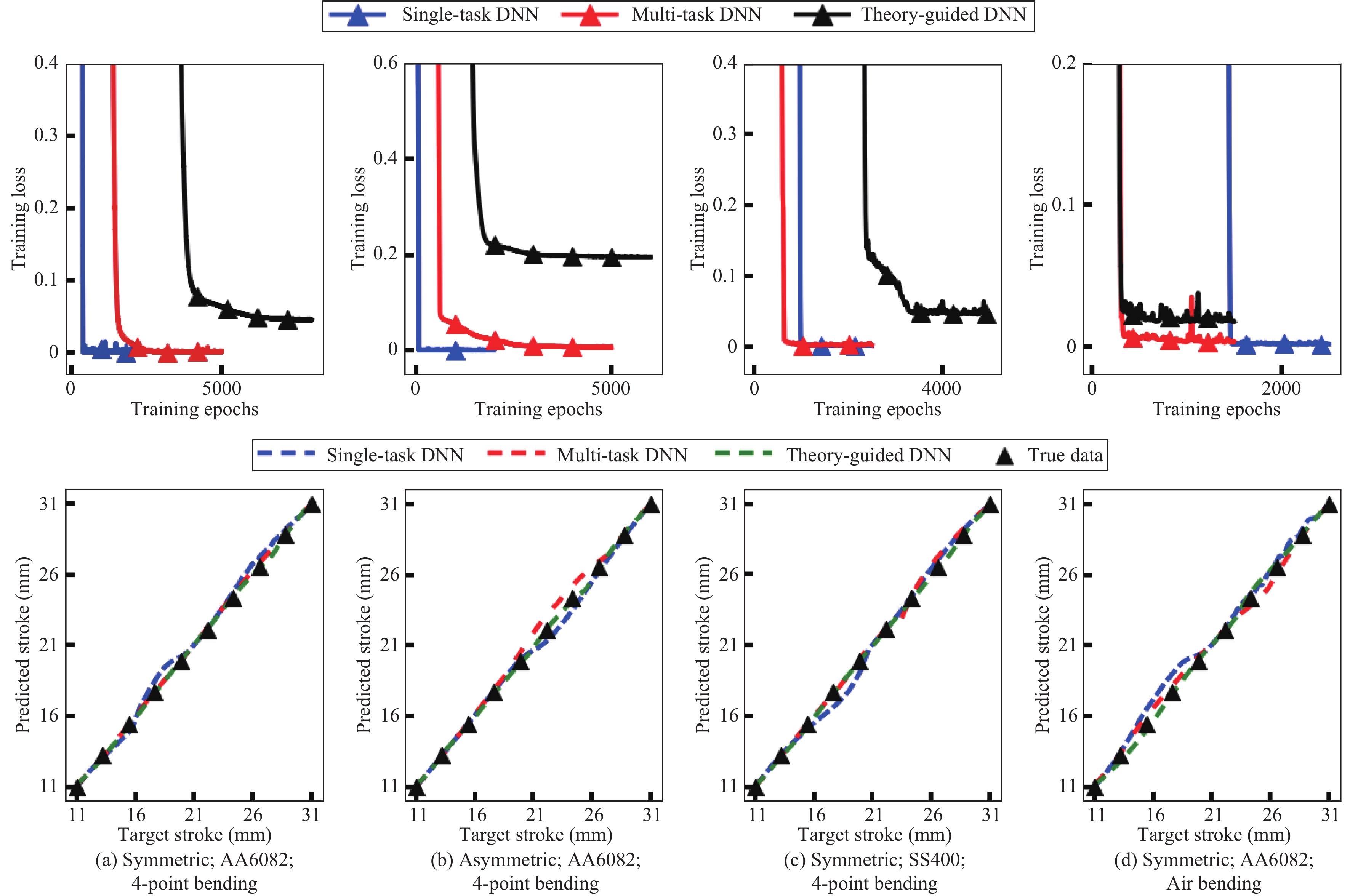
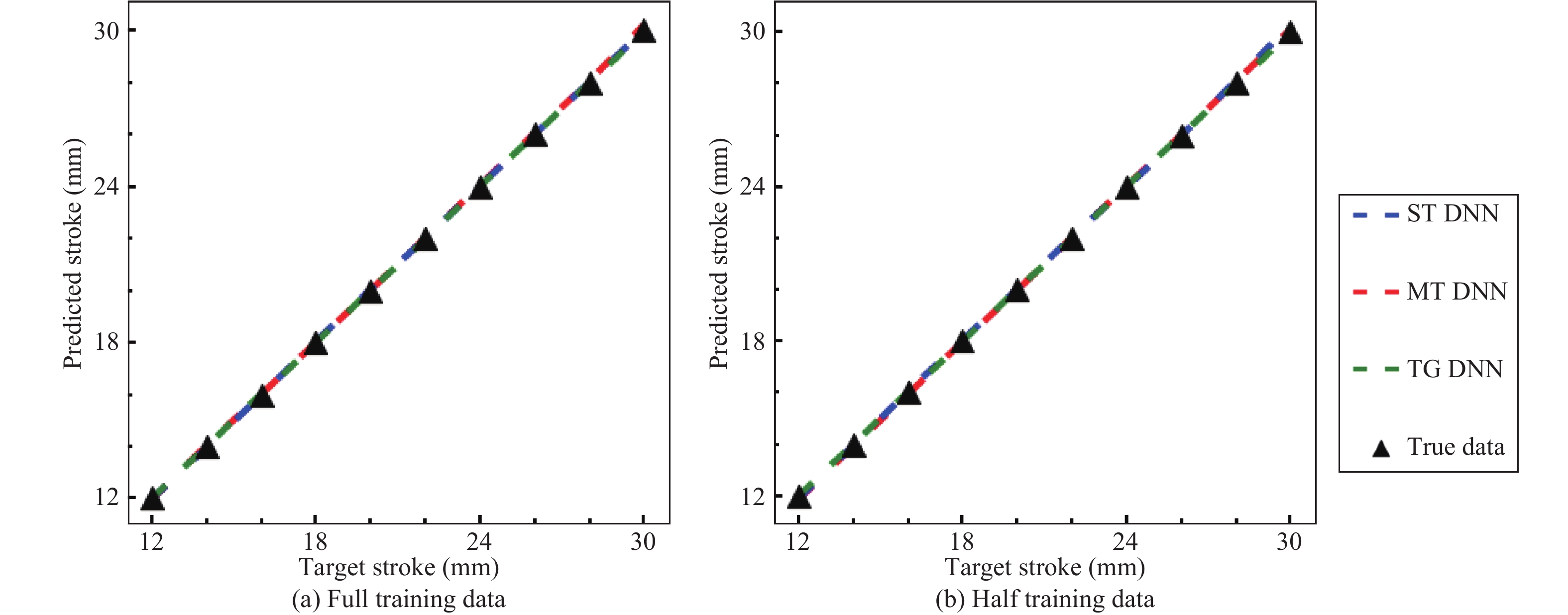
Sheet metal forming technologies have been intensively studied for decades to meet the increasing demand for lightweight metal components. To surmount the springback occurring in sheet metal forming processes, numerous studies have been performed to develop compensation methods. However, for most existing methods, the development cycle is still considerably time-consumptive and demands high computational or capital cost. In this paper, a novel theory-guided regularization method for training of deep neural networks (DNNs), implanted in a learning system, is introduced to learn the intrinsic relationship between the workpiece shape after springback and the required process parameter, e.g., loading stroke, in sheet metal bending processes. By directly bridging the workpiece shape to the process parameter, issues concerning springback in the process design would be circumvented. The novel regularization method utilizes the well-recognized theories in material mechanics, Swift’s law, by penalizing divergence from this law throughout the network training process. The regularization is implemented by a multi-task learning network architecture, with the learning of extra tasks regularized during training. The stress-strain curve describing the material properties and the prior knowledge used to guide learning are stored in the database and the knowledge base, respectively. One can obtain the predicted loading stroke for a new workpiece shape by importing the target geometry through the user interface. In this research, the neural models were found to outperform a traditional machine learning model, support vector regression model, in experiments with different amount of training data. Through a series of studies with varying conditions of training data structure and amount, workpiece material and applied bending processes, the theory-guided DNN has been shown to achieve superior generalization and learning consistency than the data-driven DNNs, especially when only scarce and scattered experiment data are available for training which is often the case in practice. The theory-guided DNN could also be applicable to other sheet metal forming processes. It provides an alternative method for compensating springback with significantly shorter development cycle and less capital cost and computational requirement than traditional compensation methods in sheet metal forming industry.
Shiming Liu, Yifan Xia, Zhusheng Shi, Hui Yu, Zhiqiang Li and Jianguo Lin, "Deep Learning in Sheet Metal Bending With a Novel Theory-Guided Deep Neural Network," IEEE/CAA J. Autom. Sinica, vol. 8, no. 3, pp. 565-581, Mar. 2021. doi: 10.1109/JAS.2021.1003871.








 E-mail Alert
E-mail Alert


