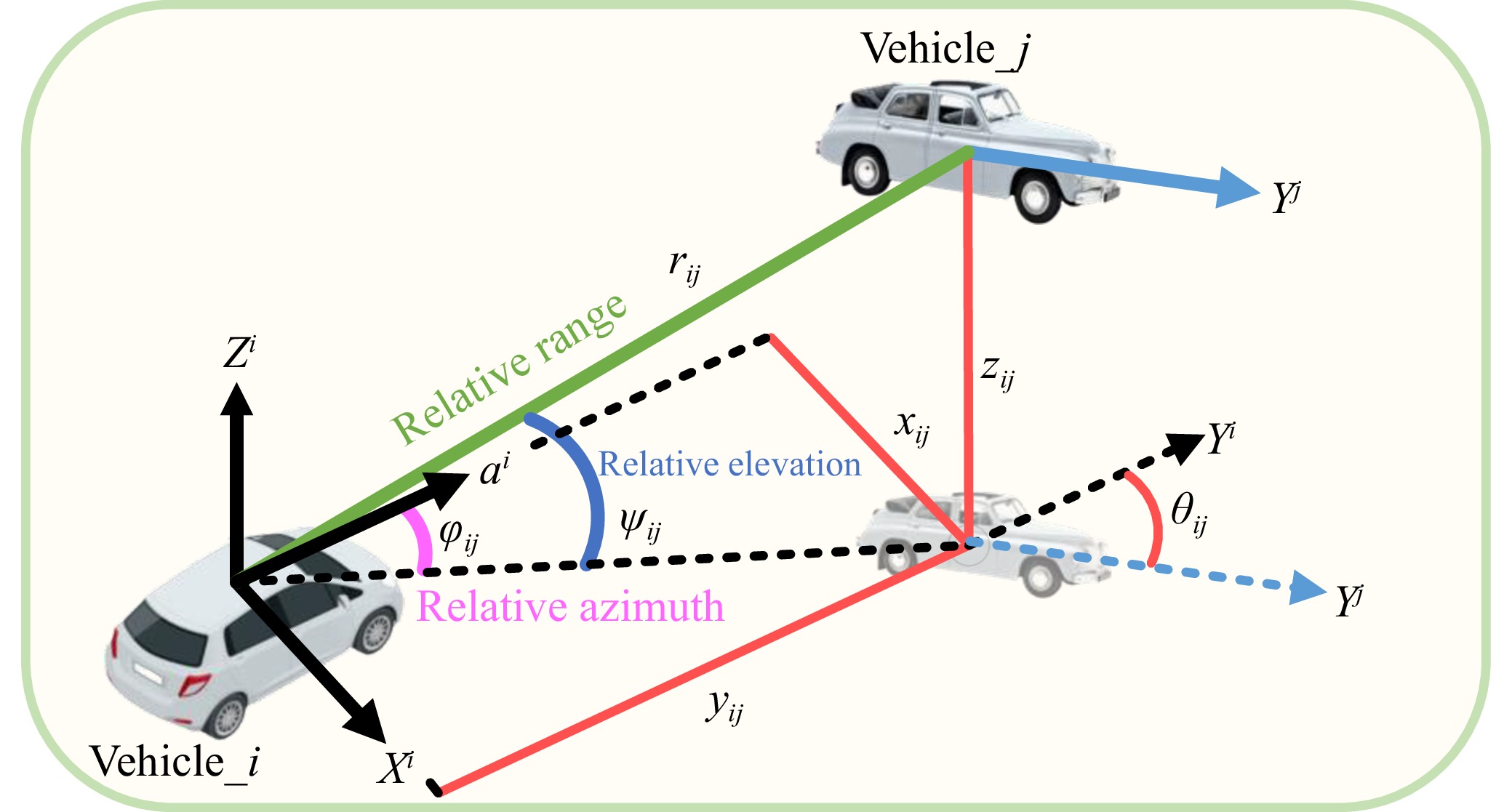
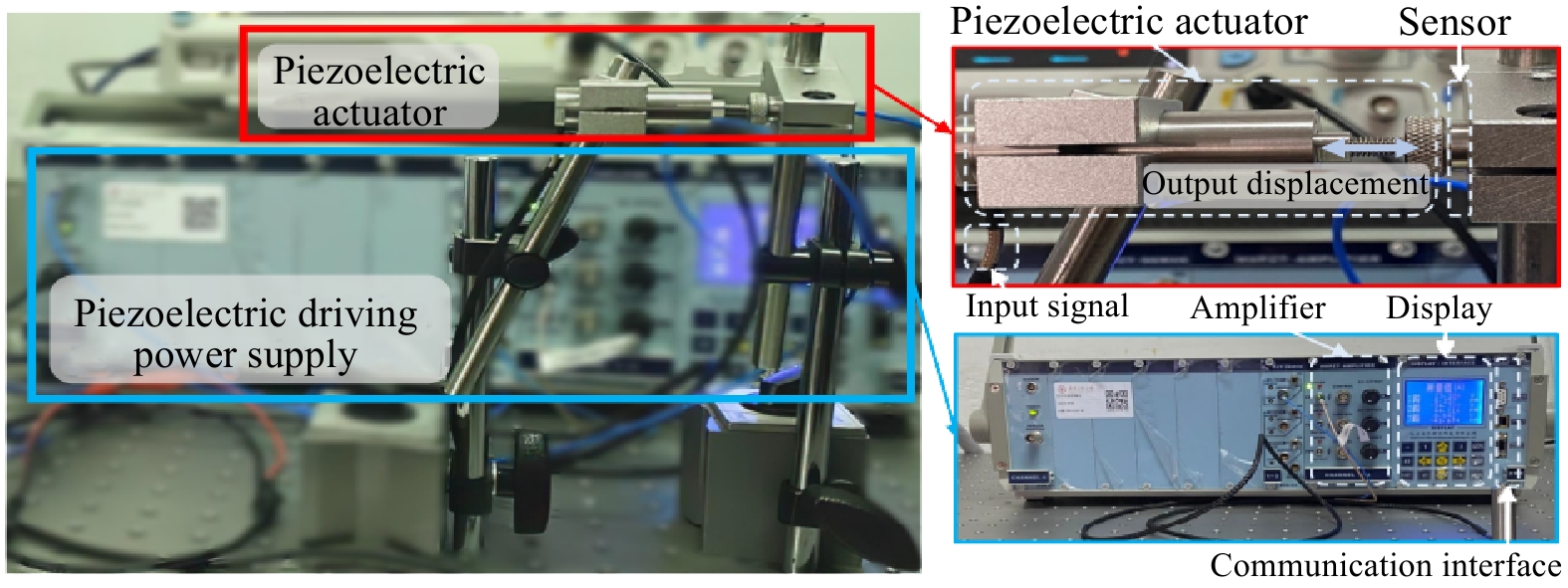
Song Fu,
Yue Wang,
Lin Lin,
Minghang Zhao,
Lizheng Zu,
Yifan Lu,
Feng Guo,
Shiwei Suo,
Yikun Liu,
Sihao Zhang,
Shisheng Zhong
2025, 12(8): 1610-1635.
doi: 10.1109/JAS.2025.125126
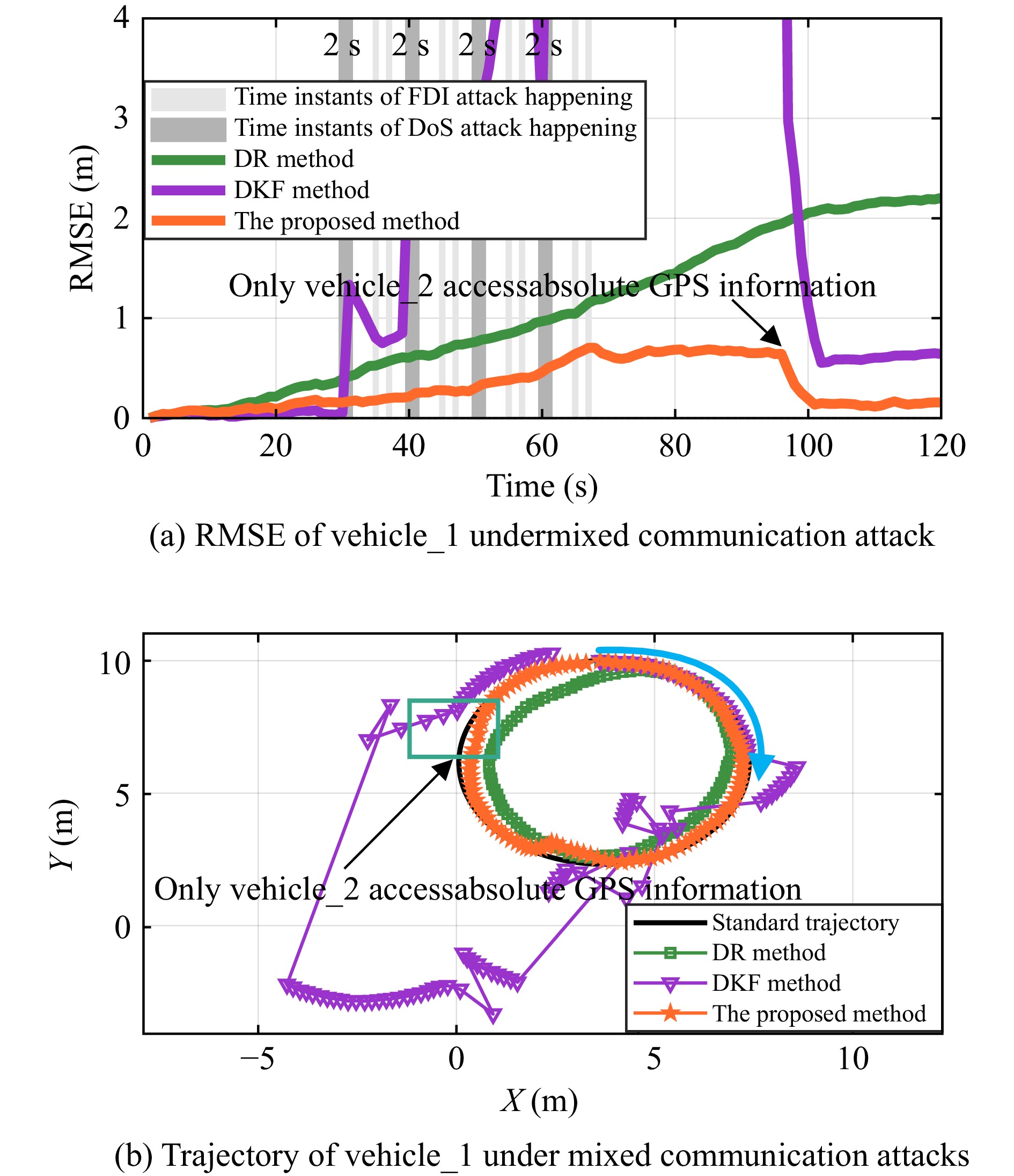
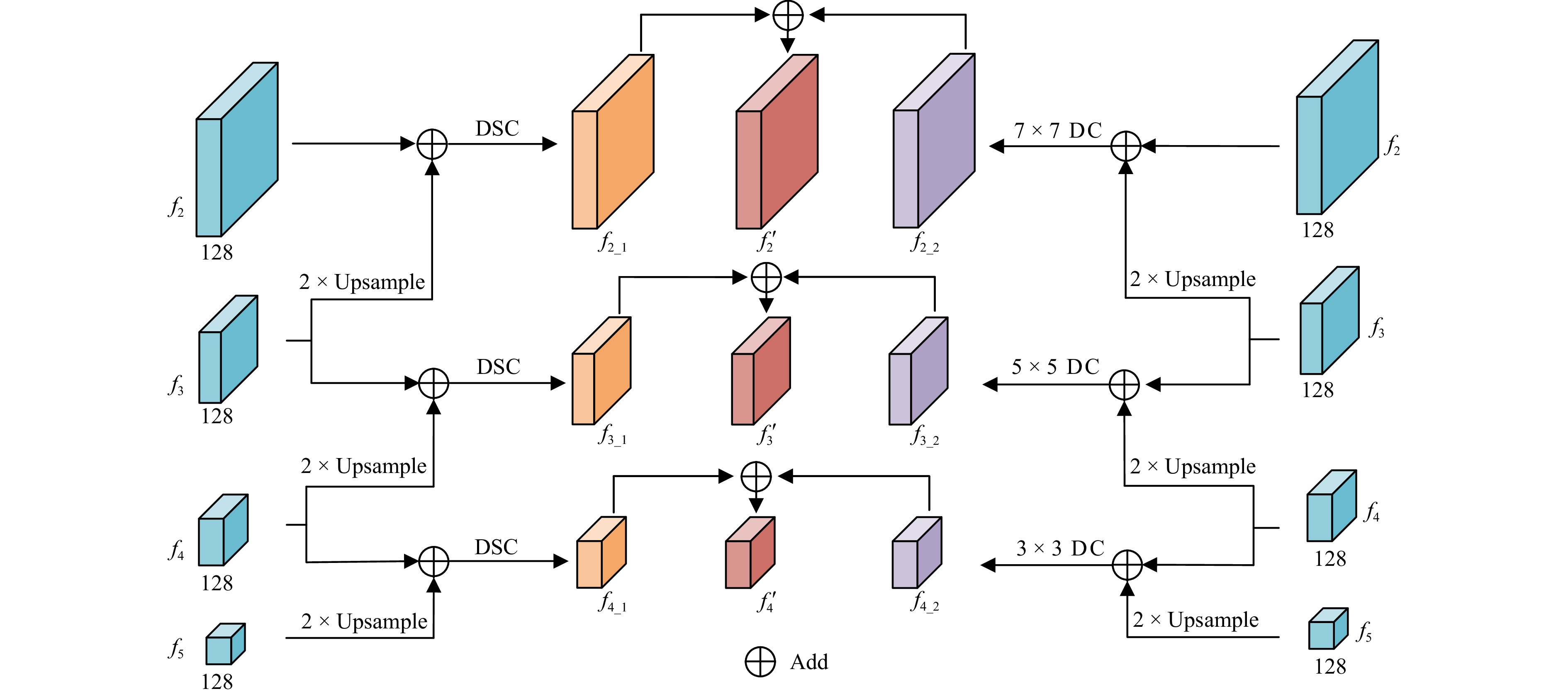
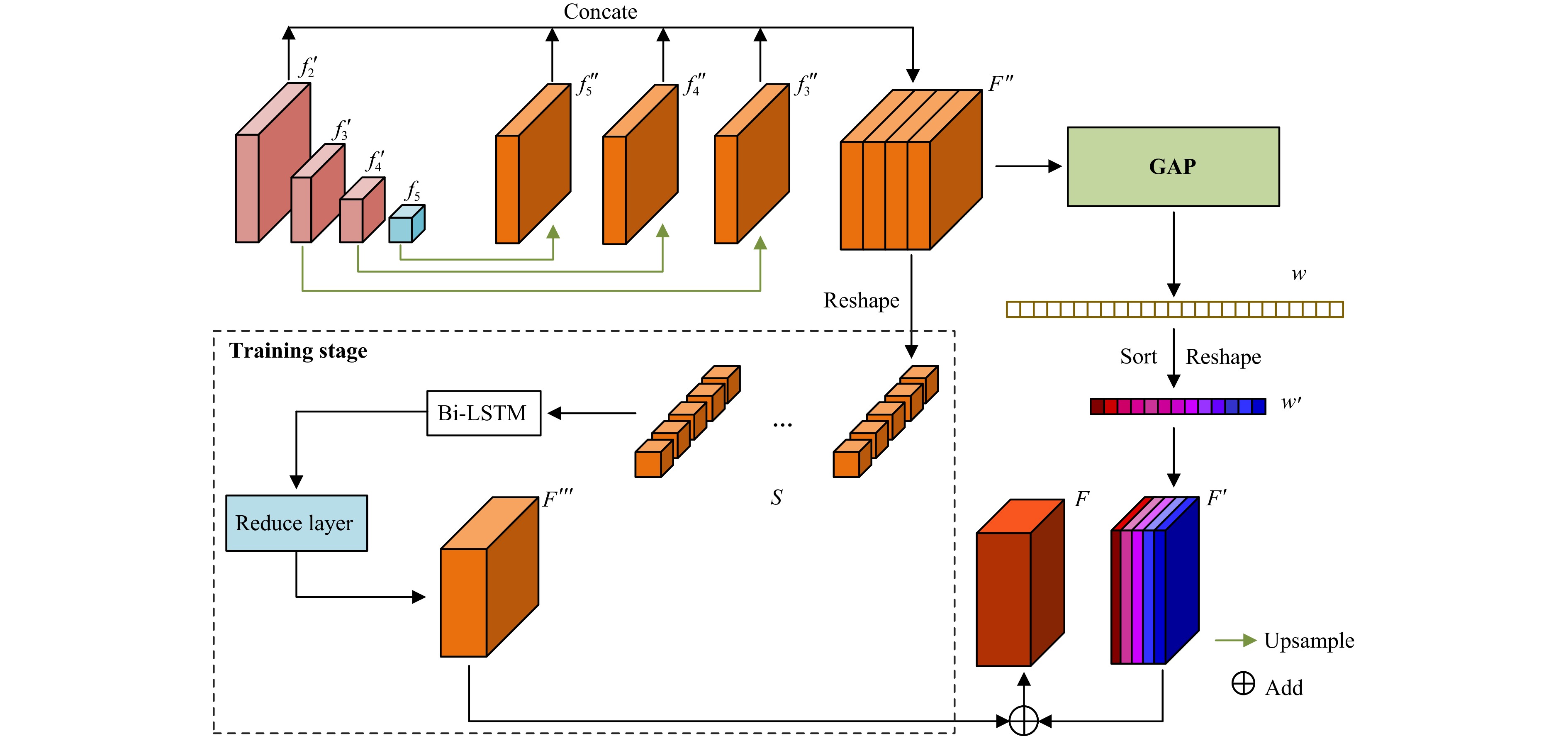
Abstract:
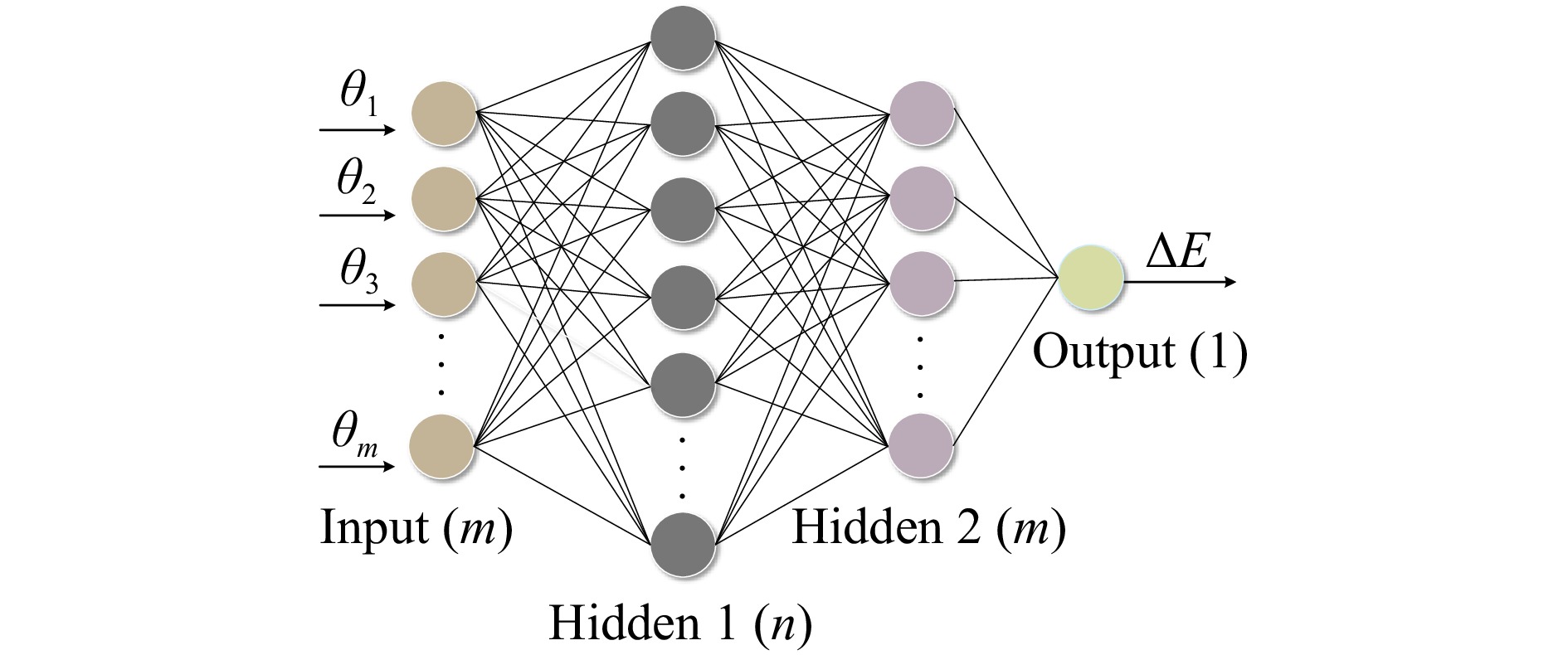
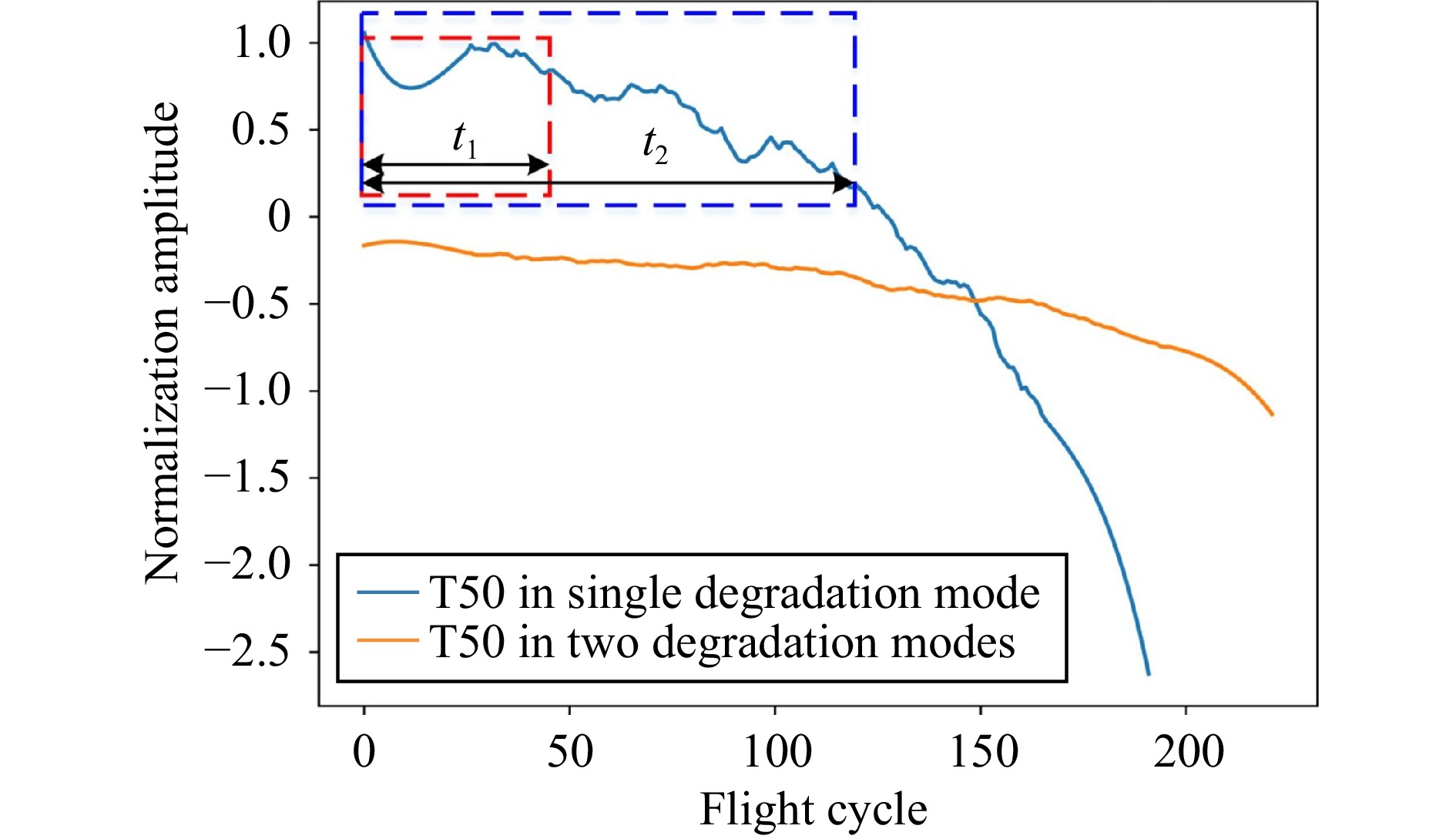
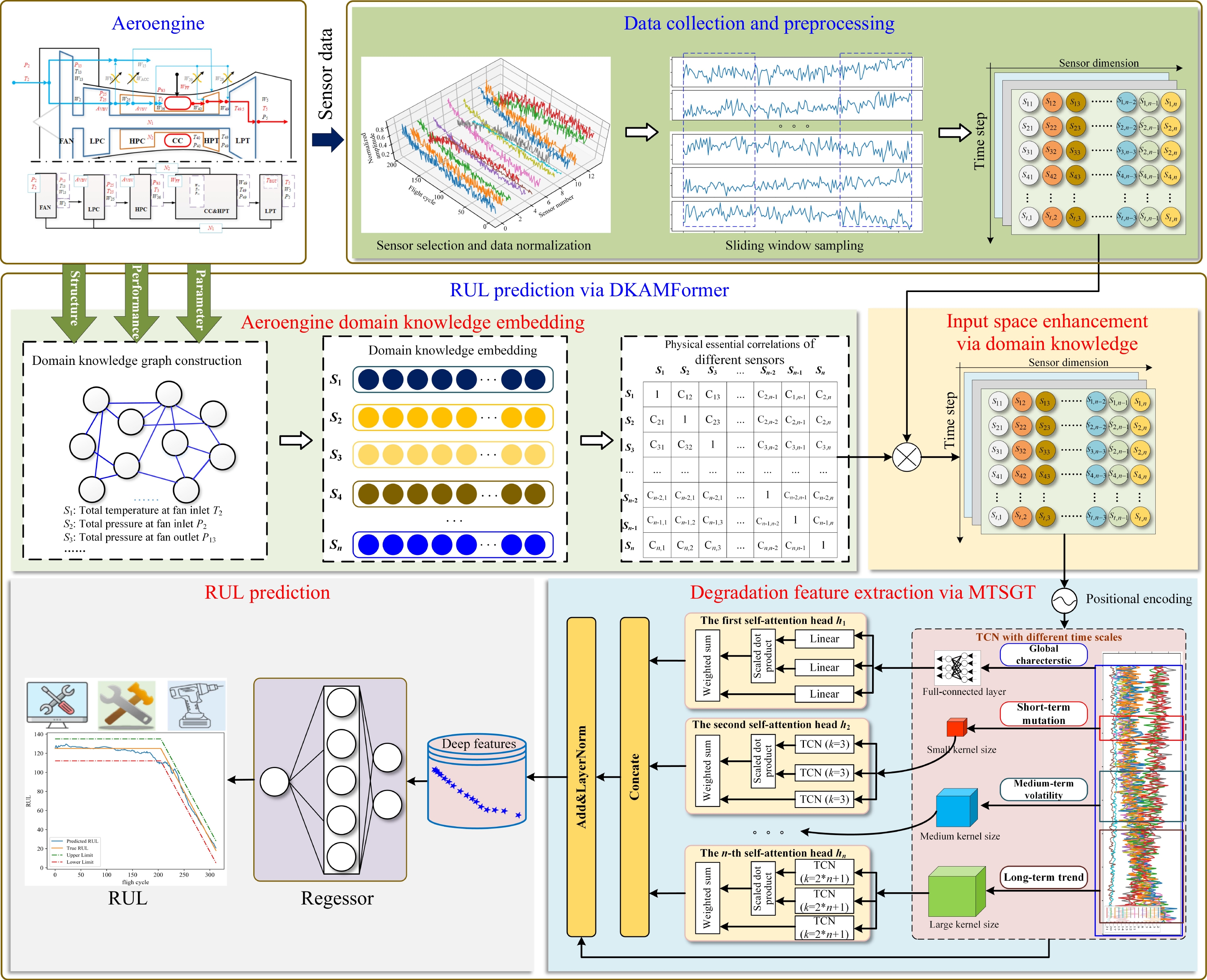
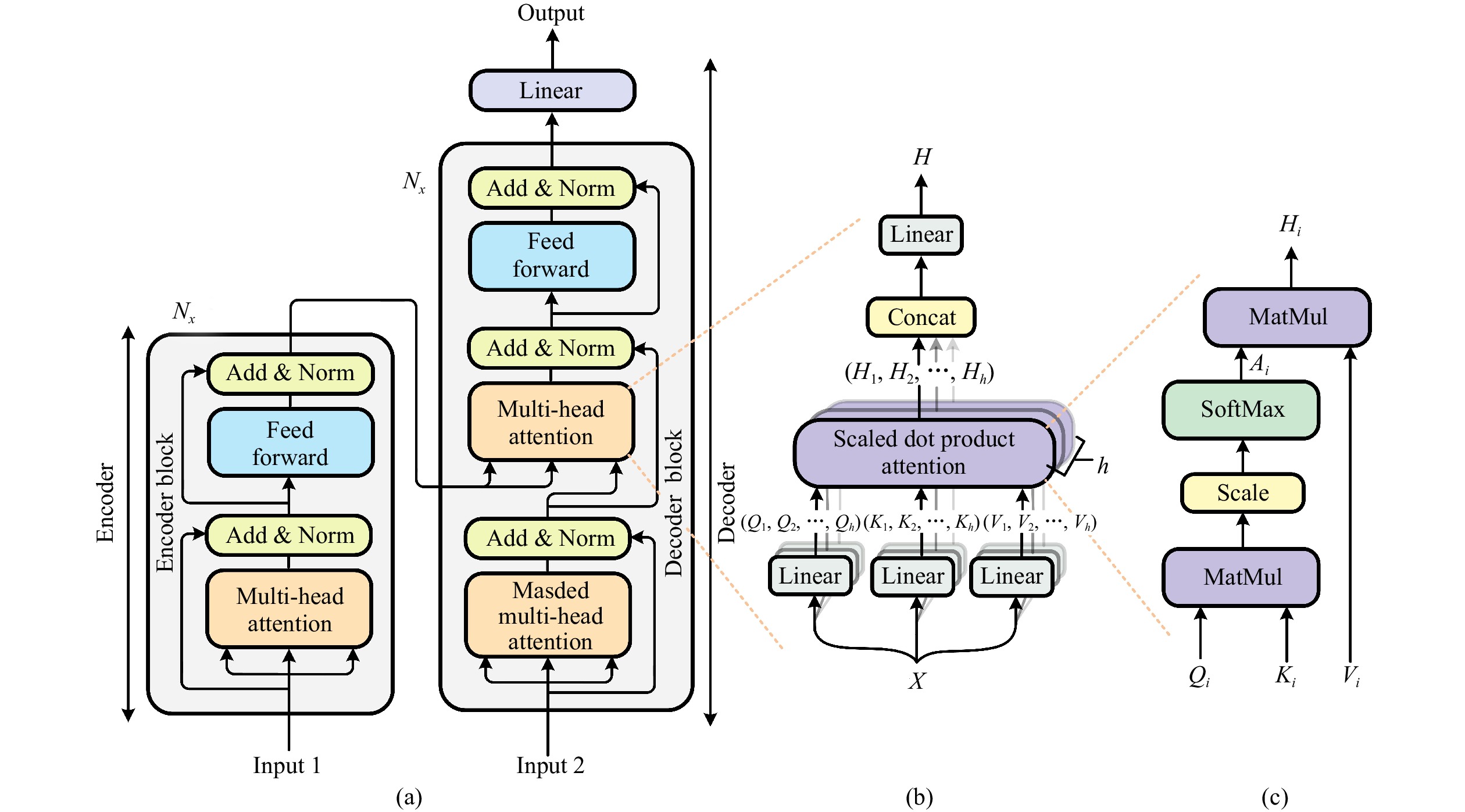
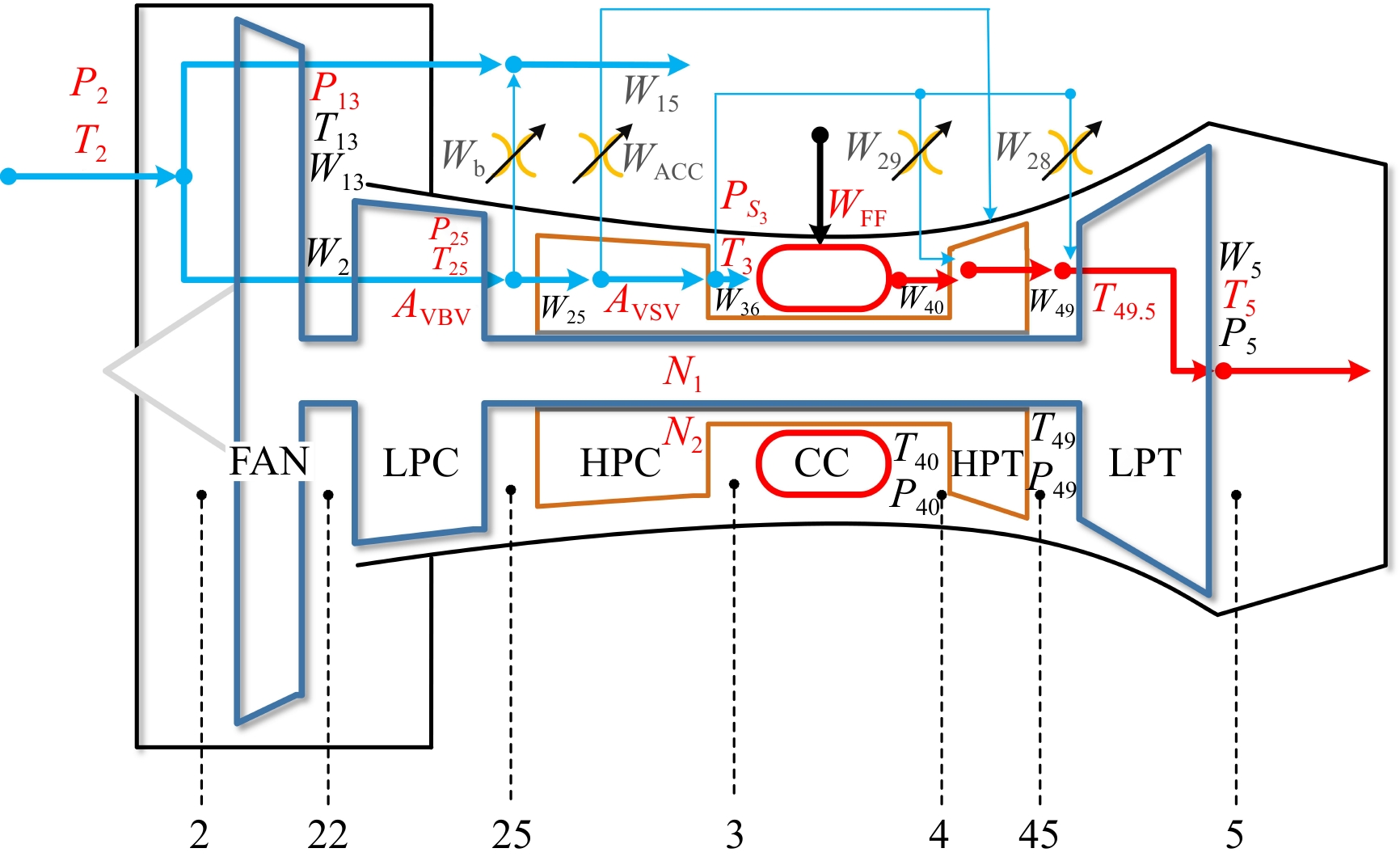
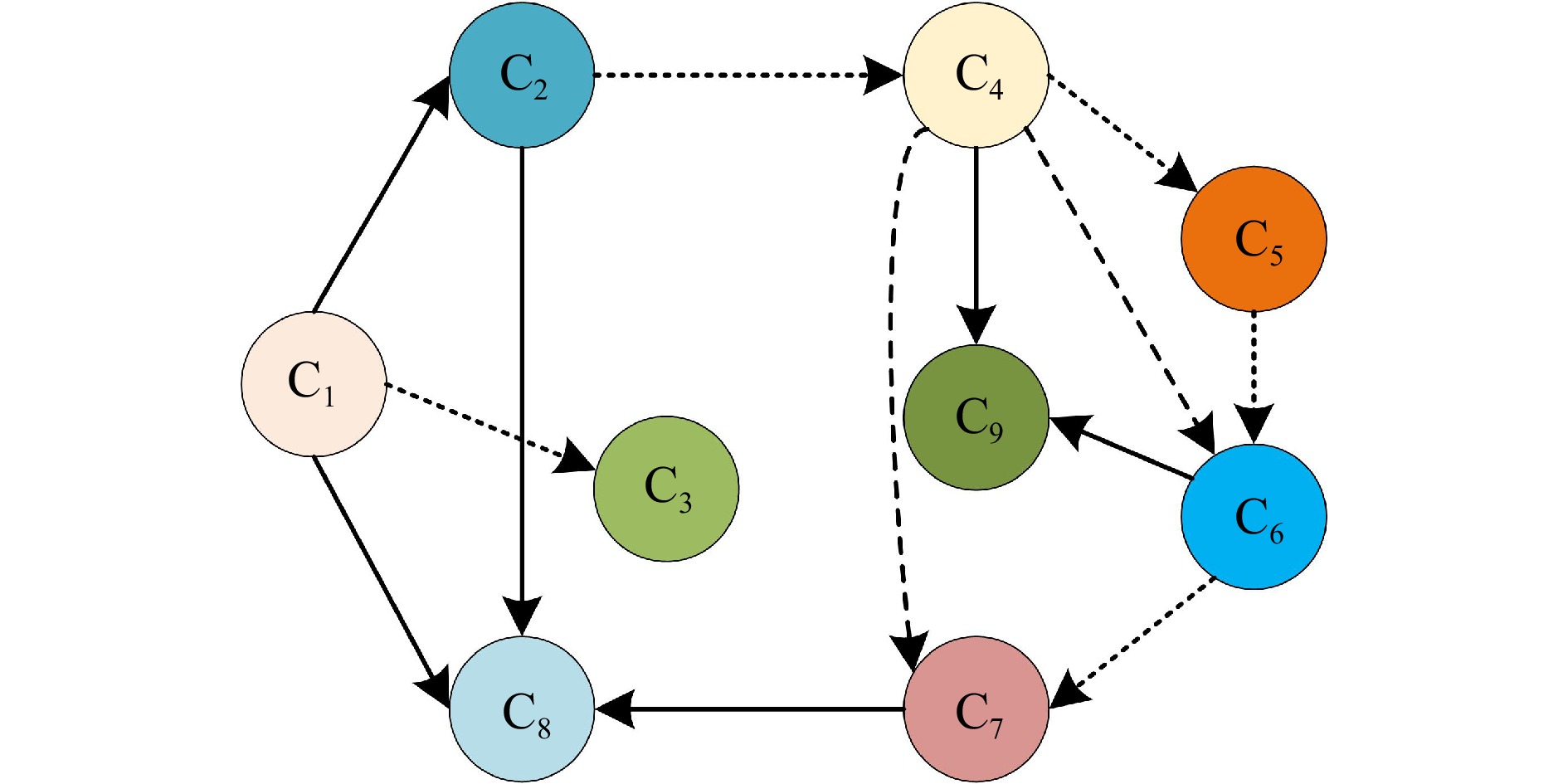
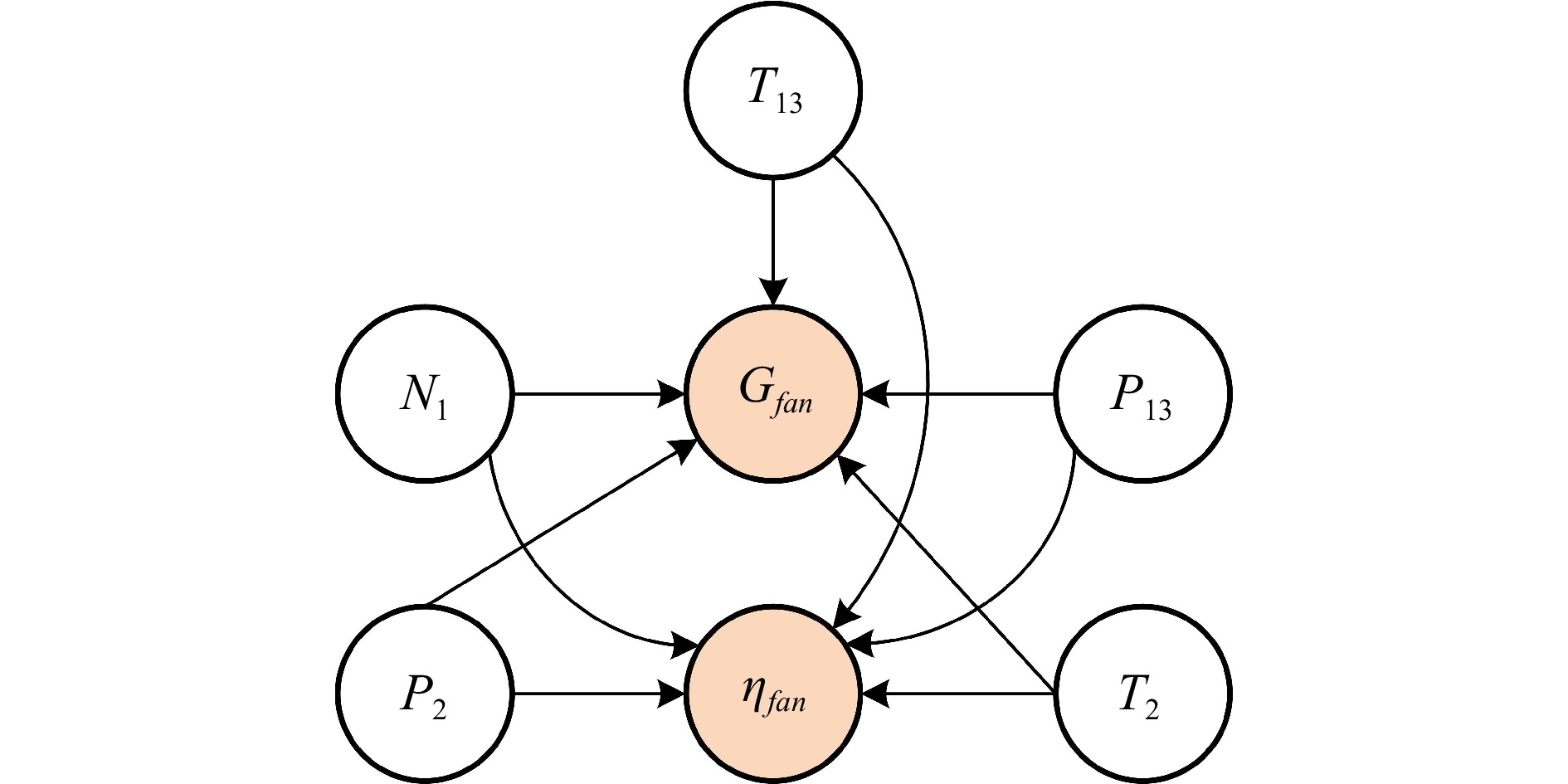
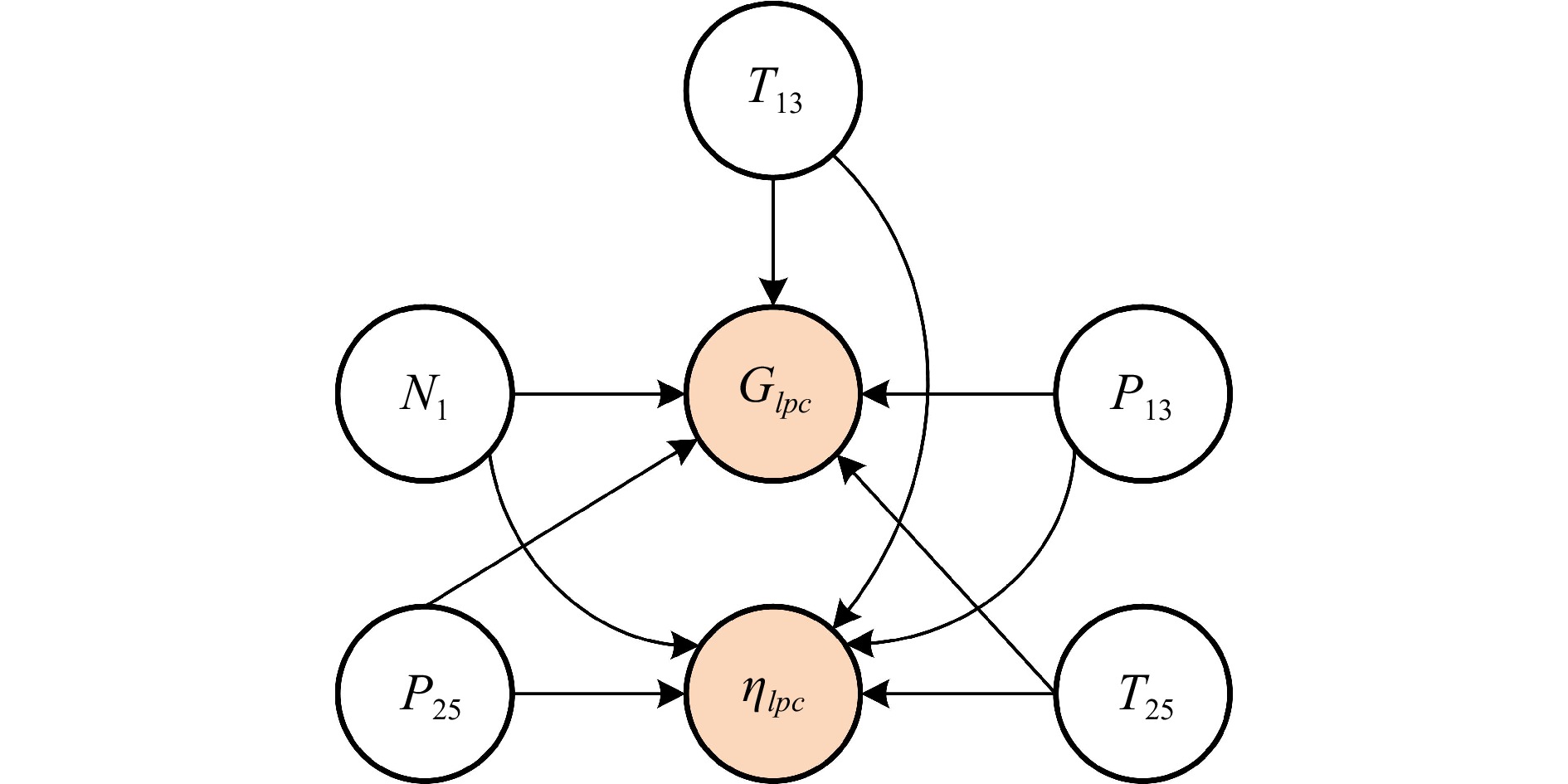
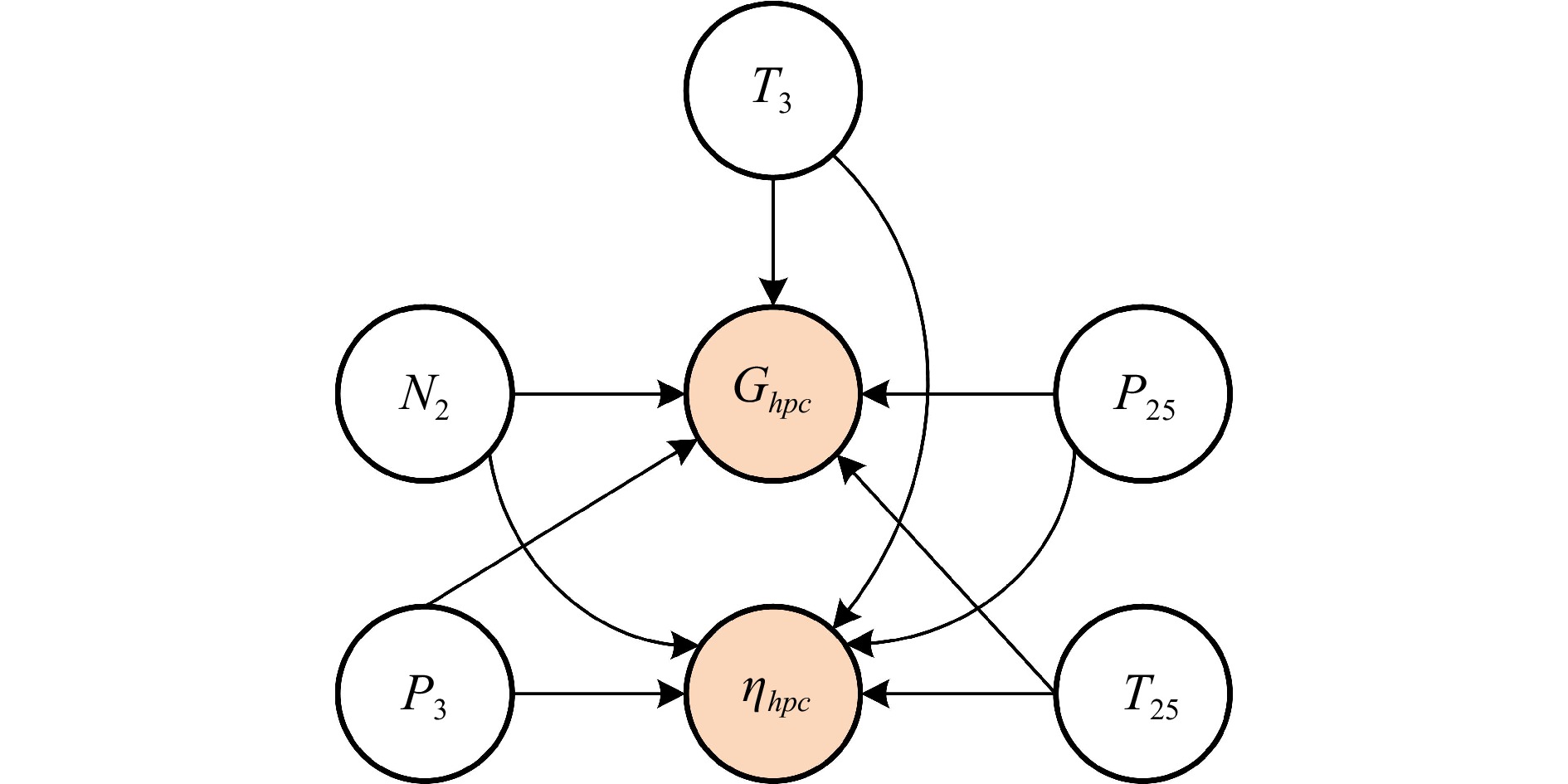
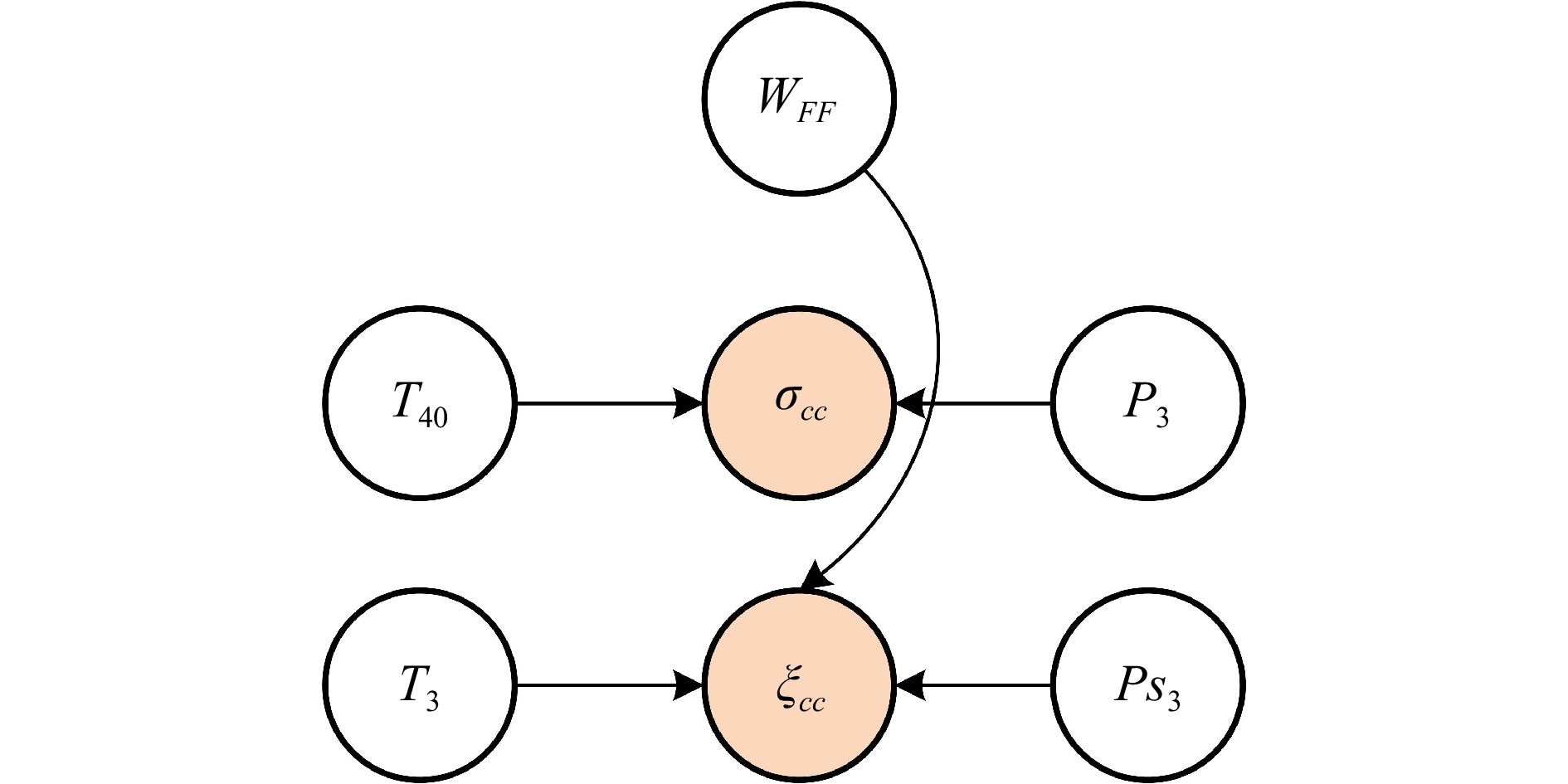
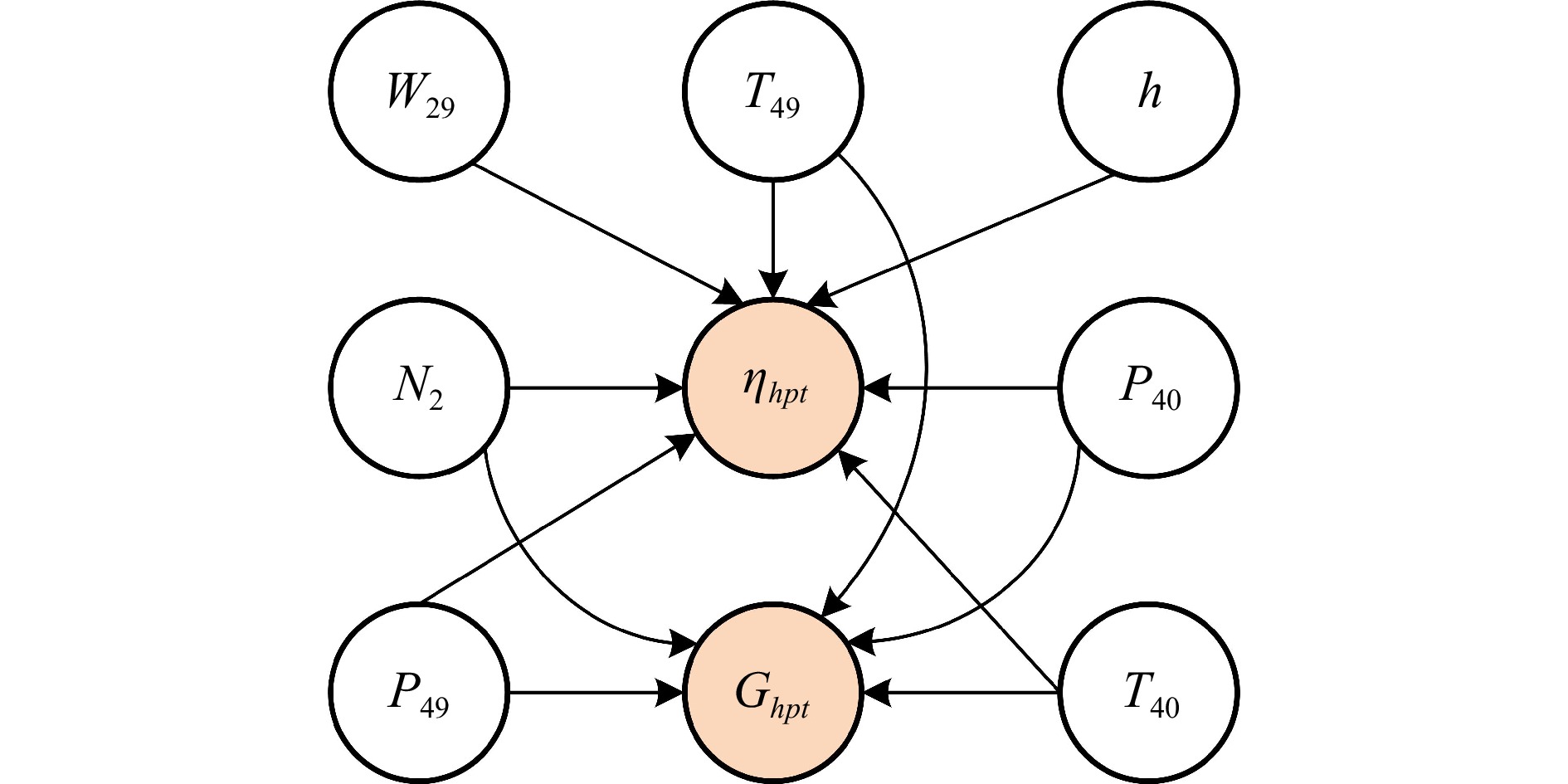
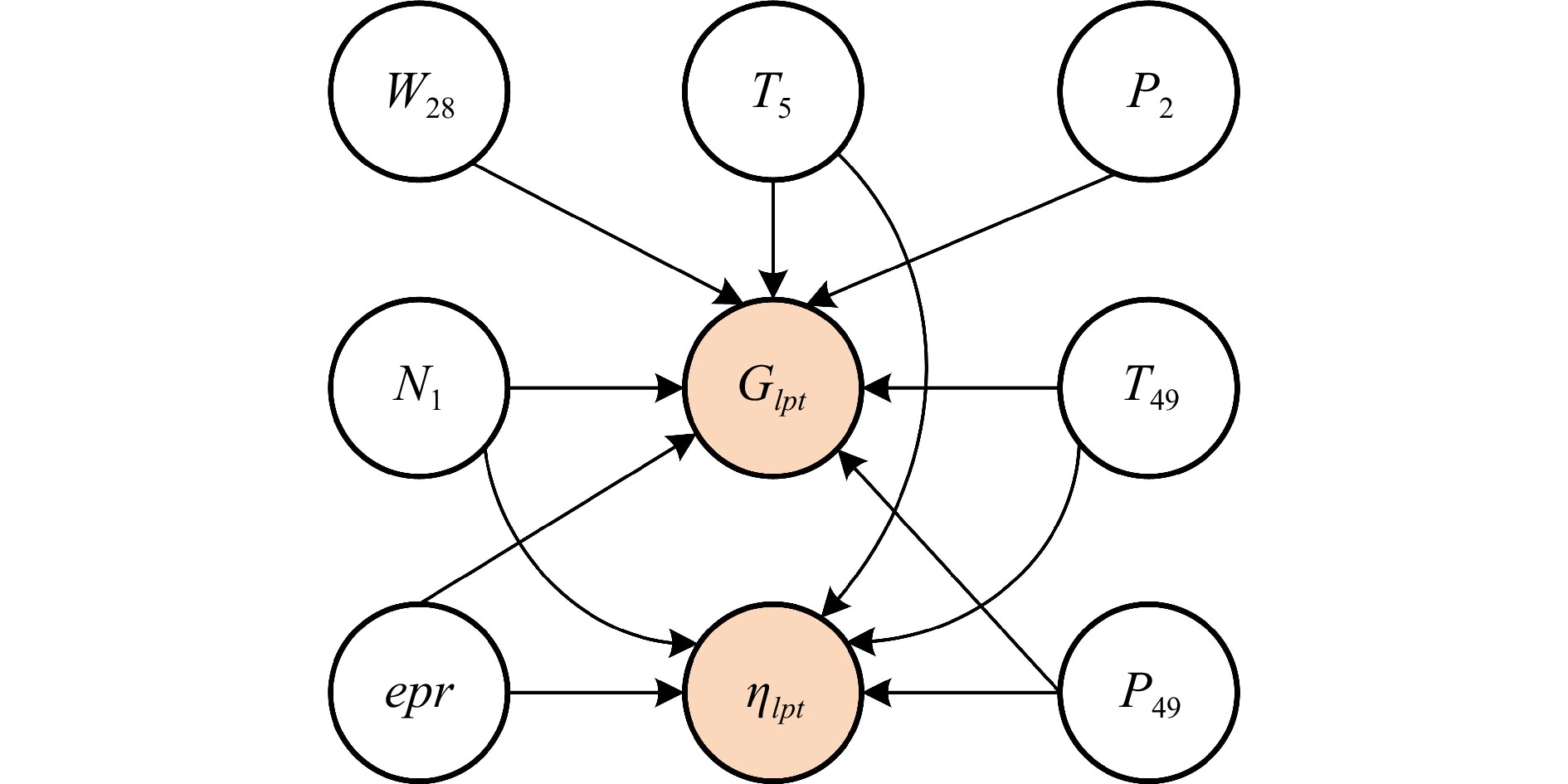
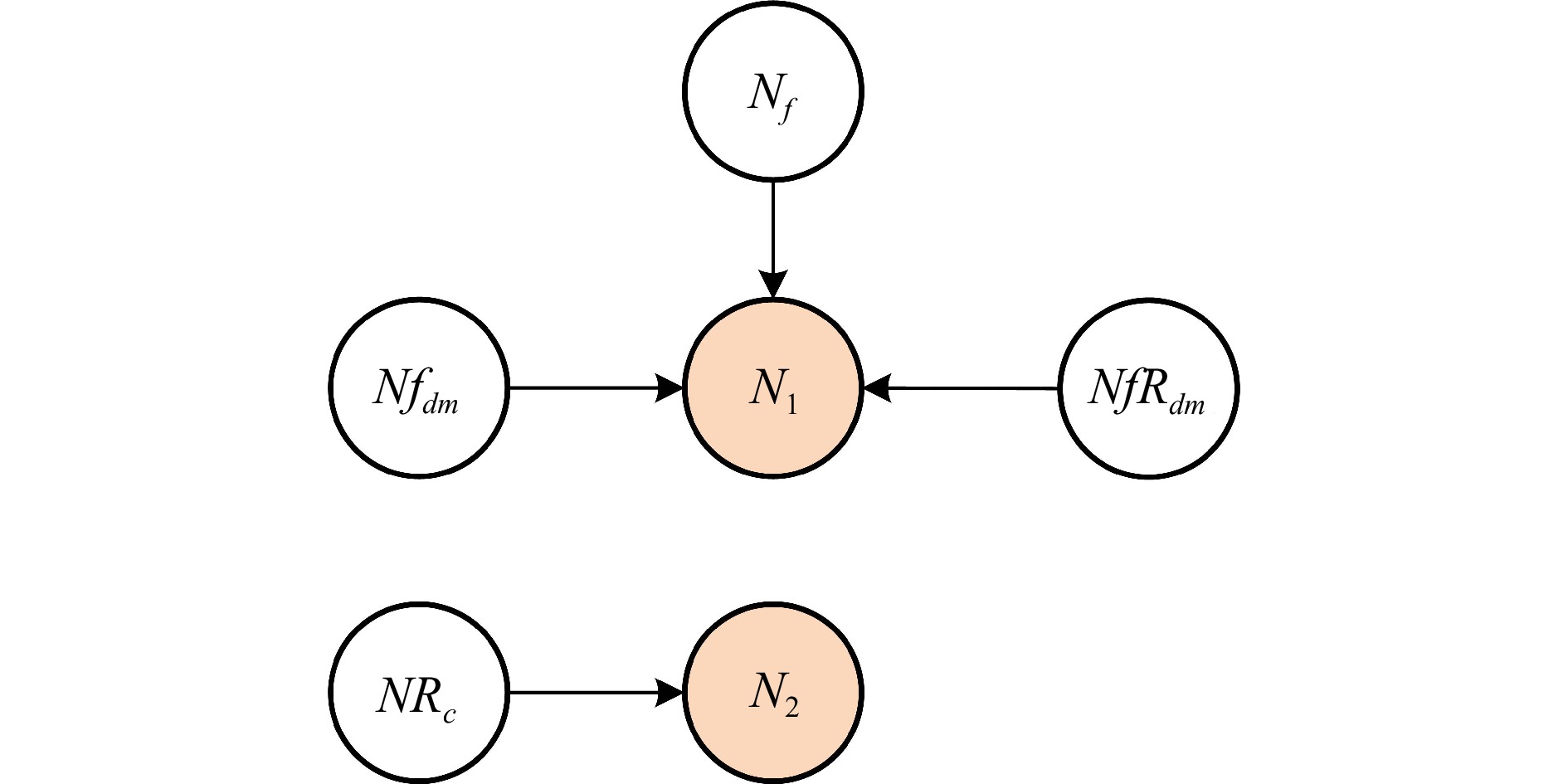
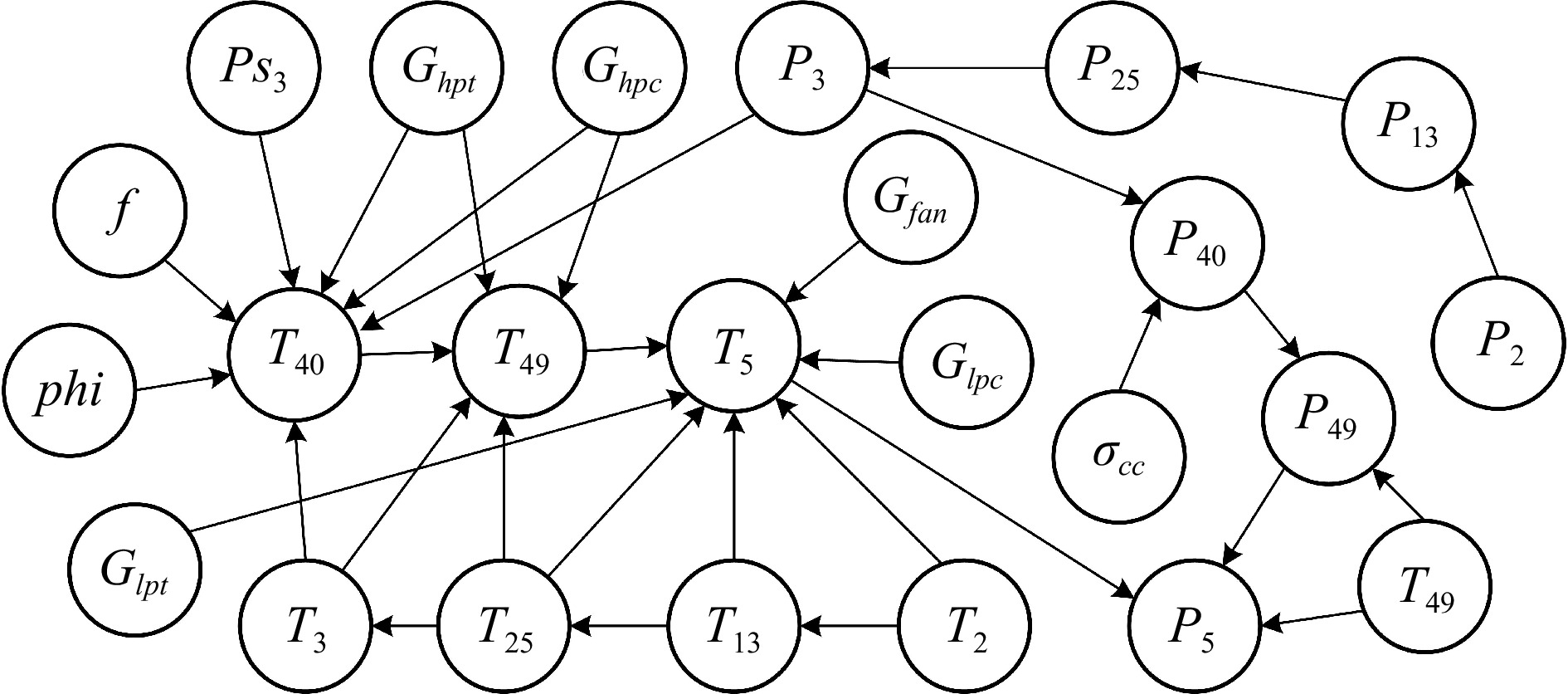
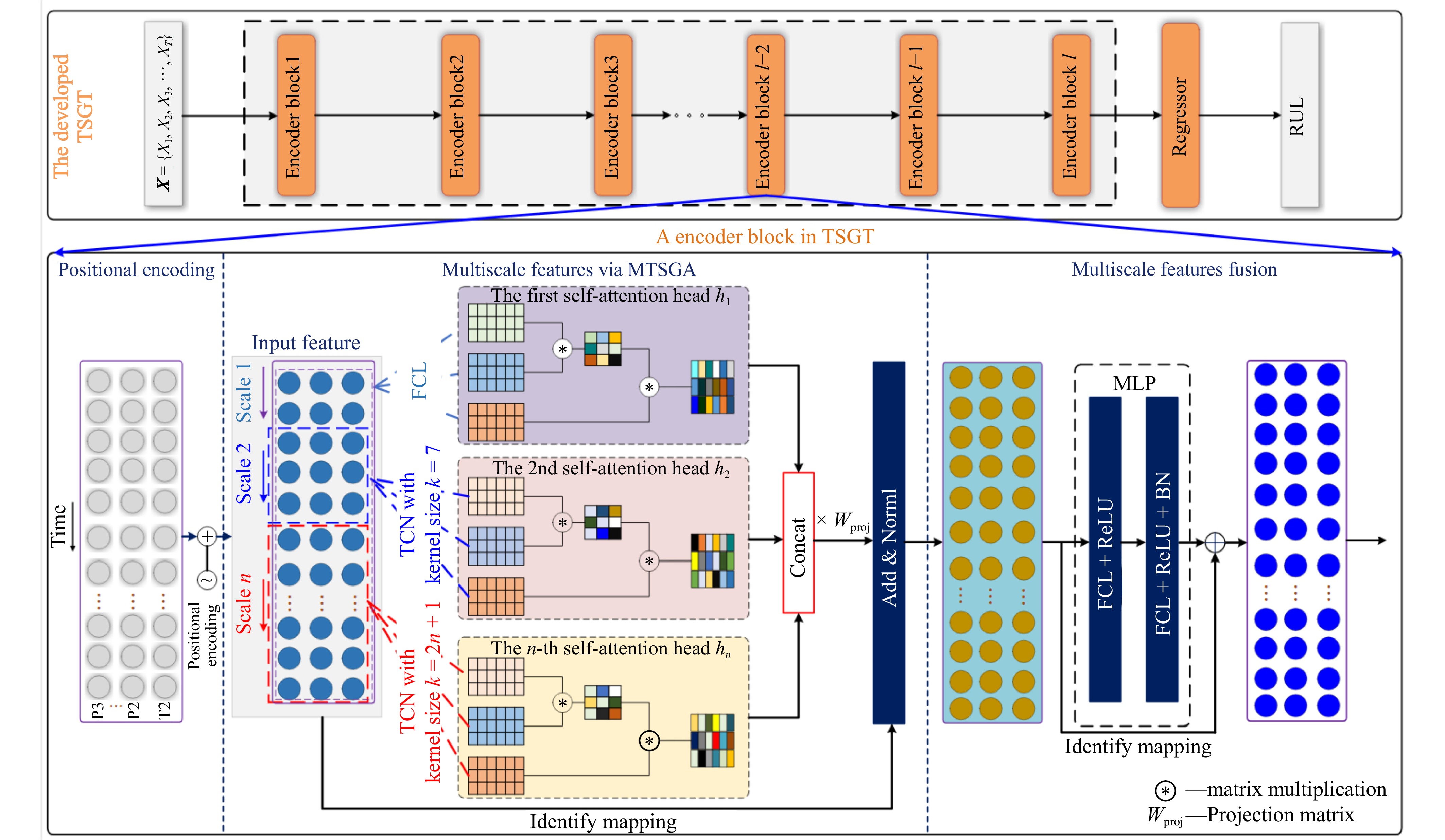
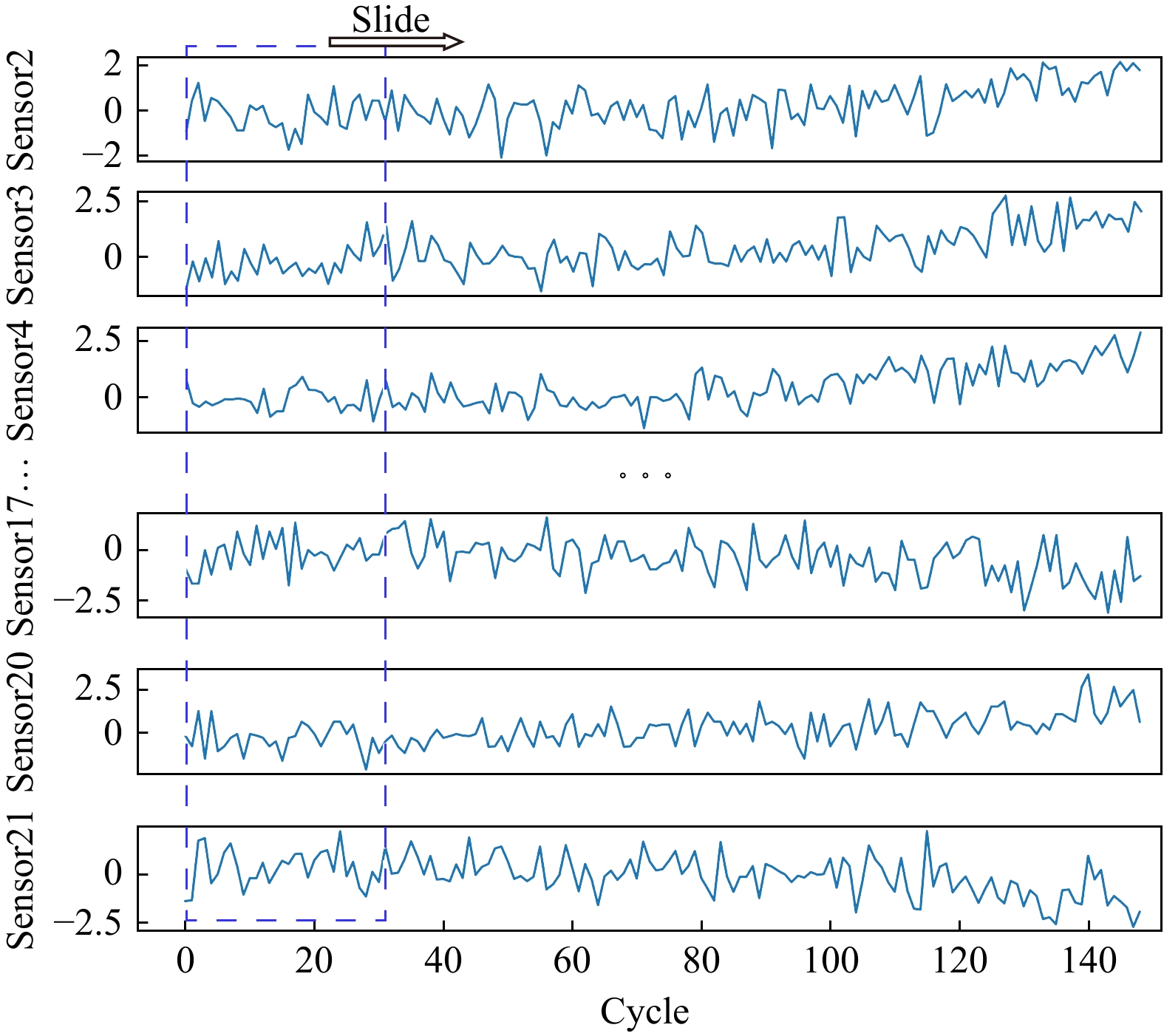
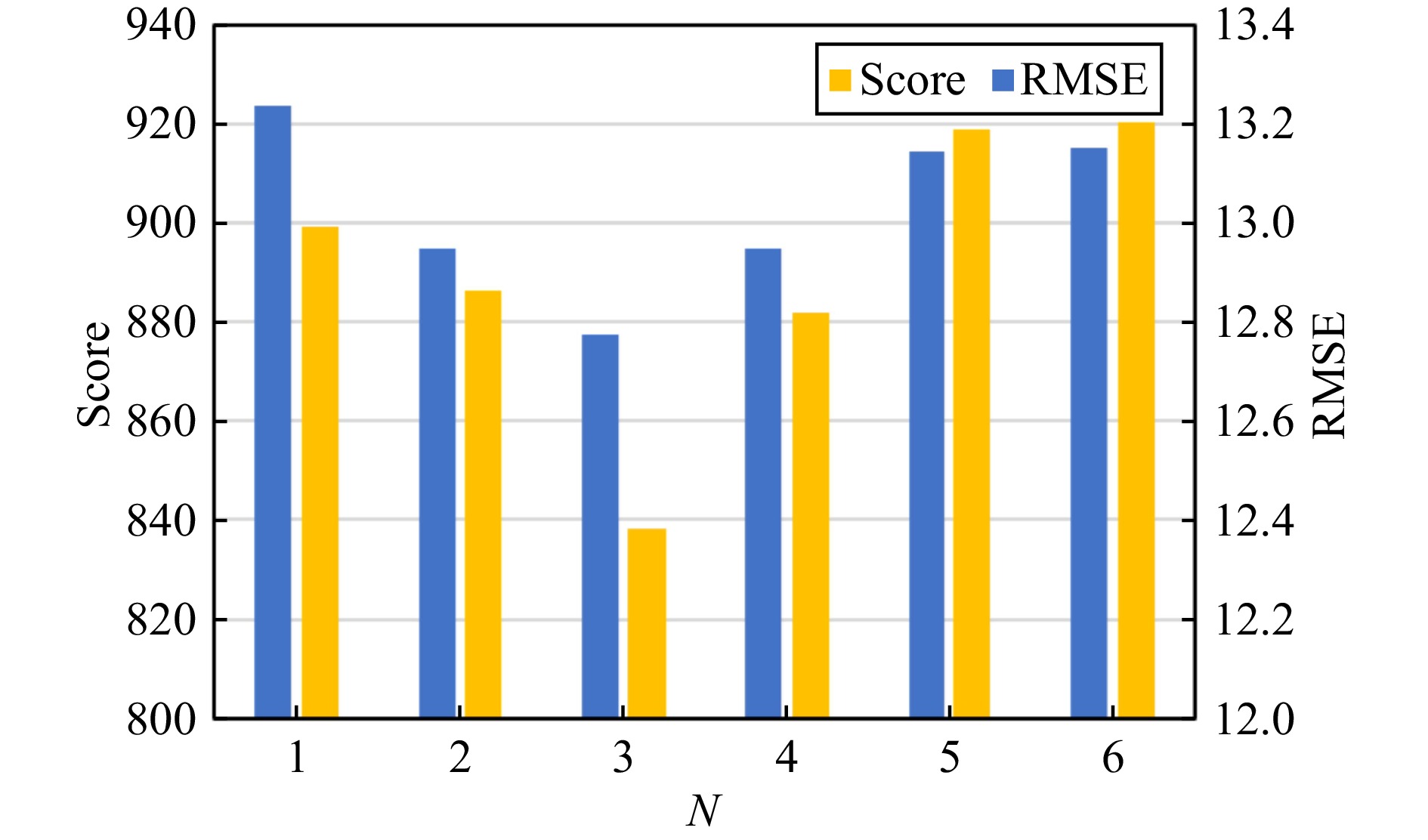
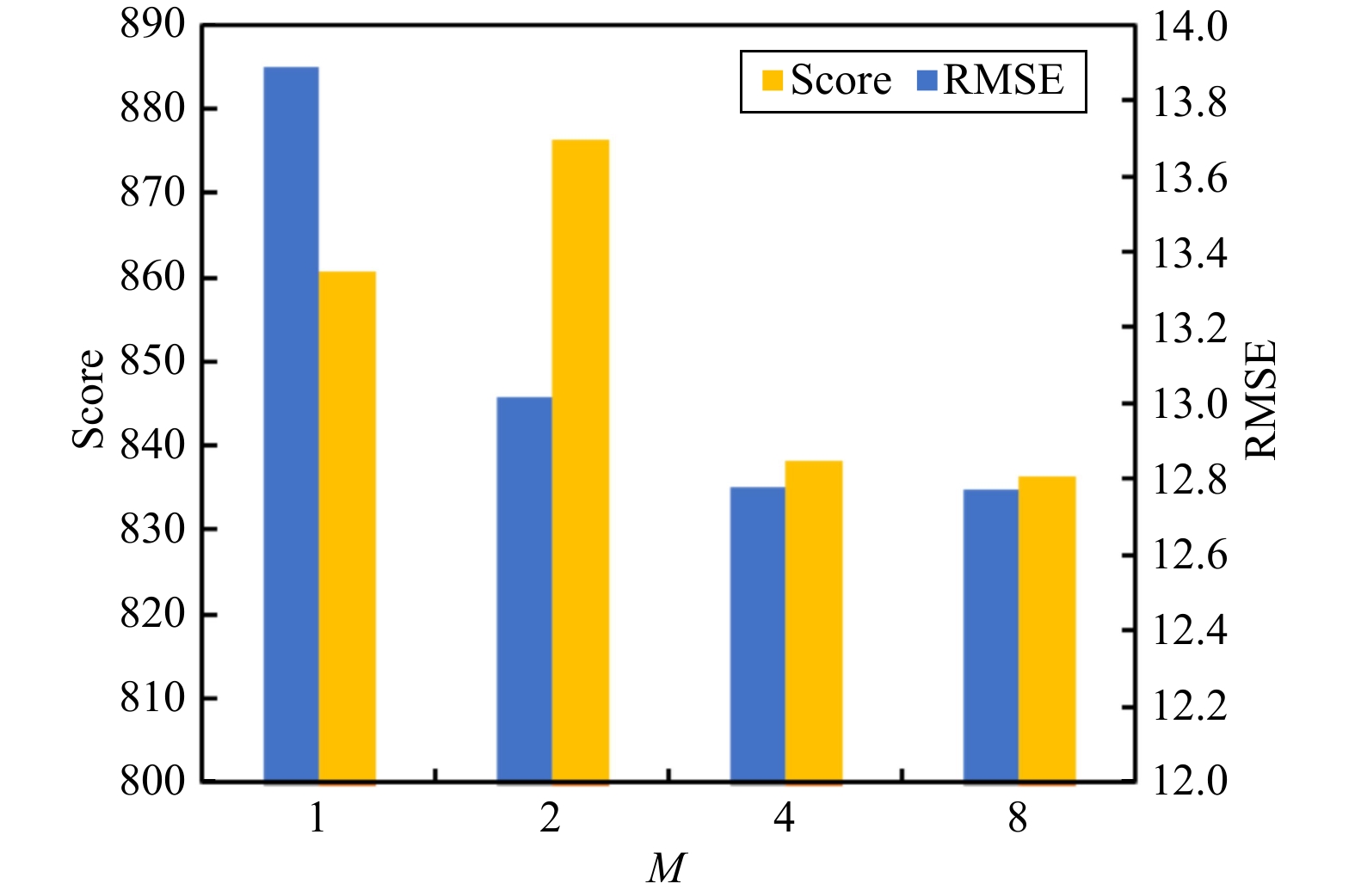
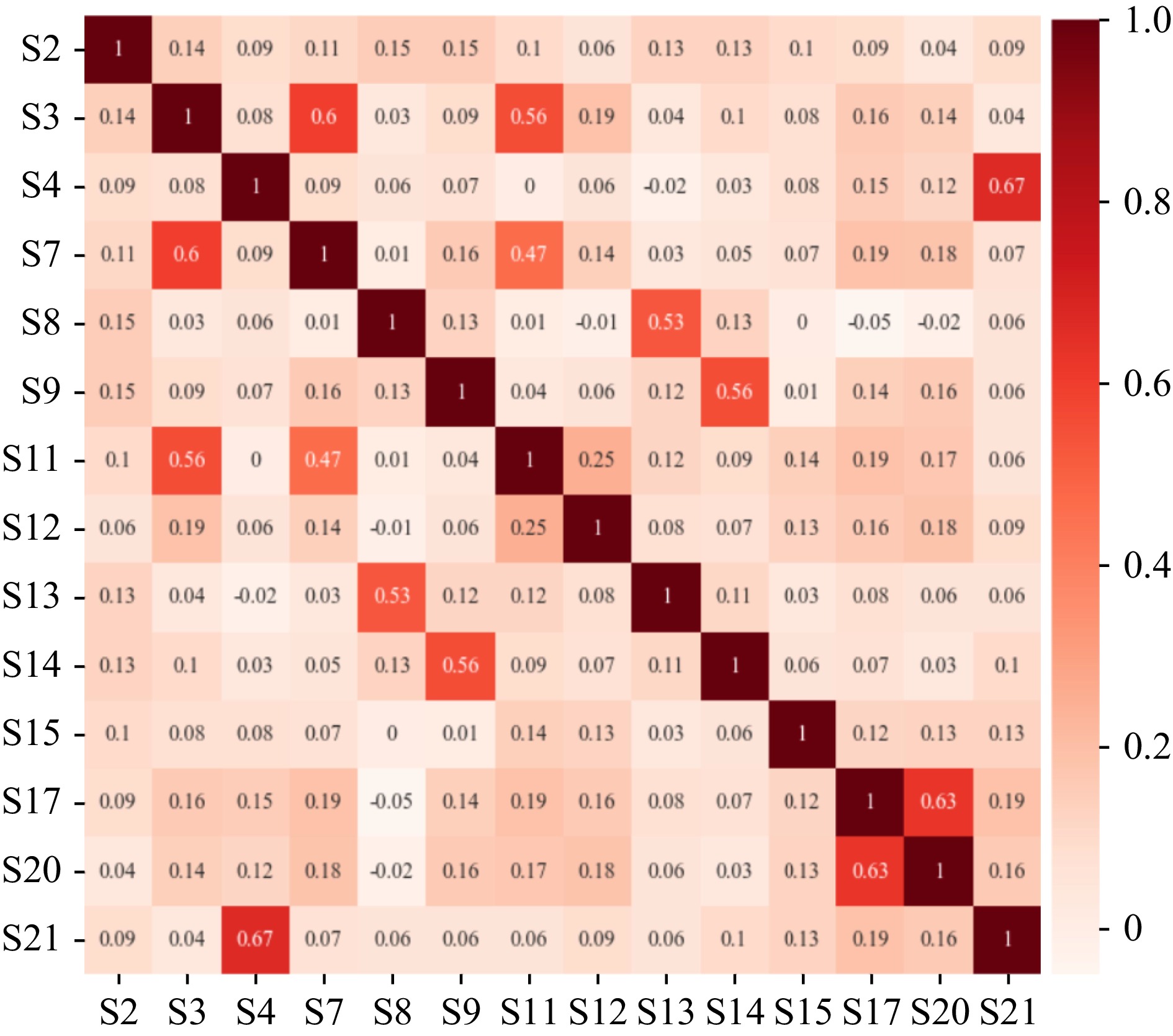
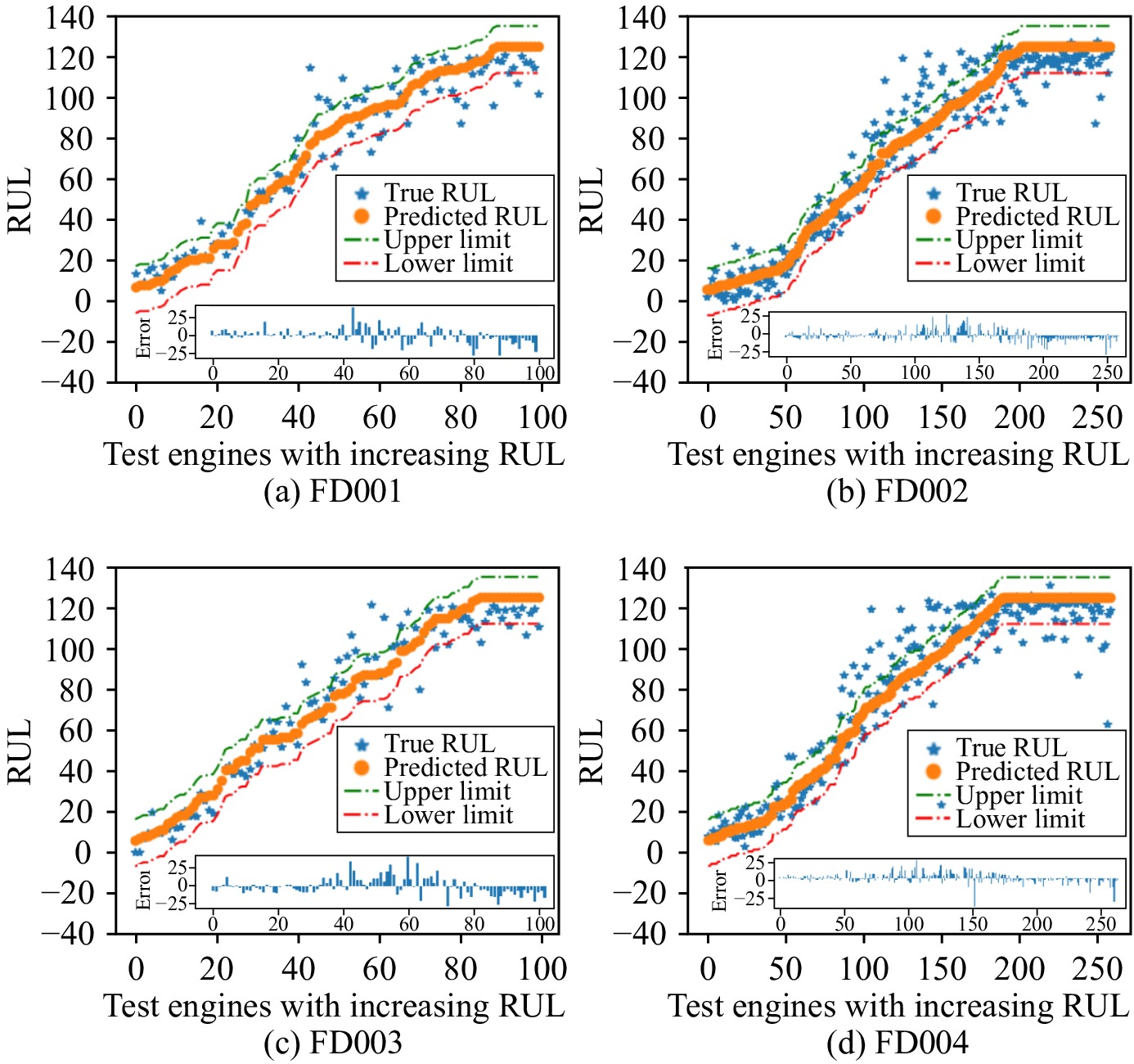
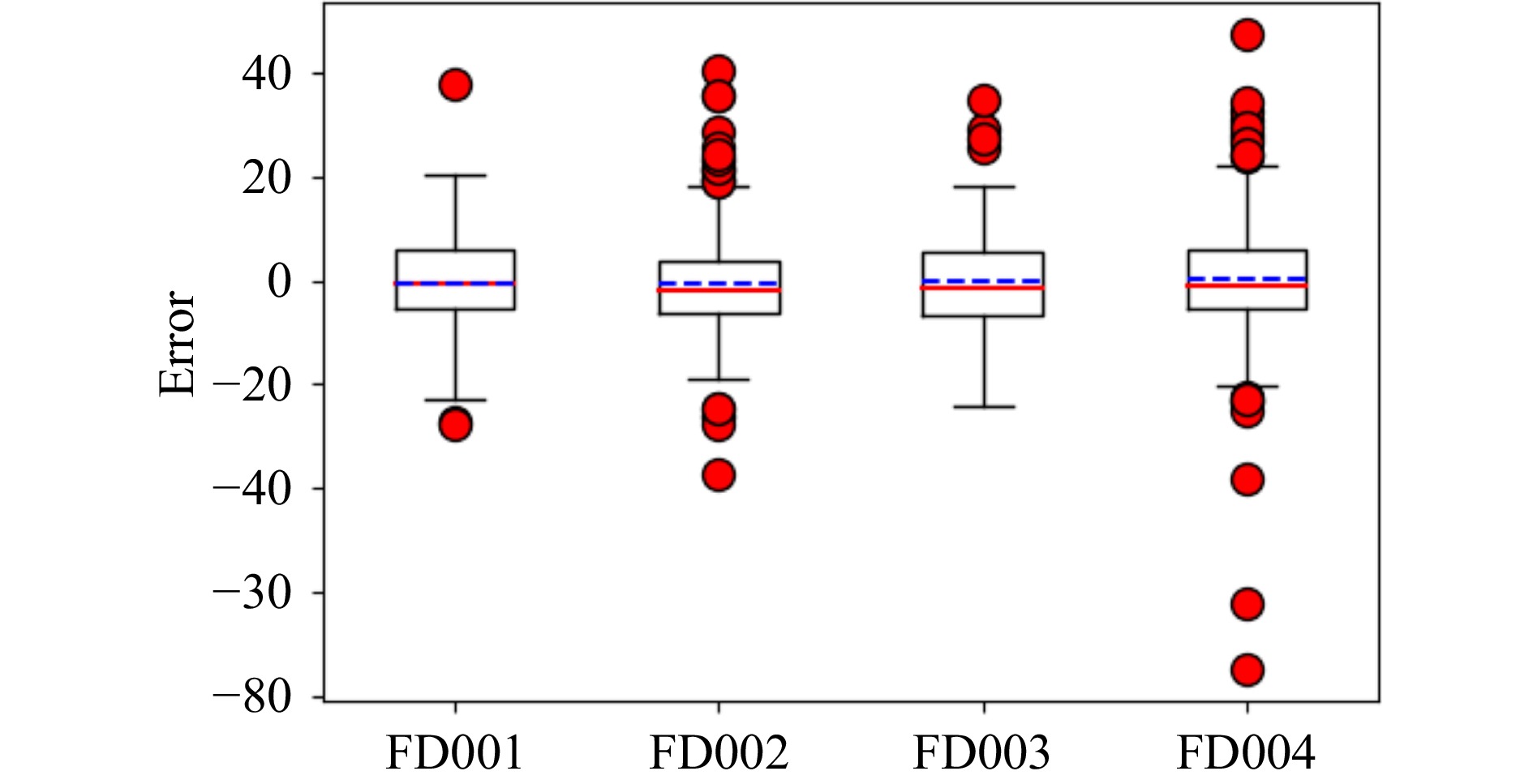
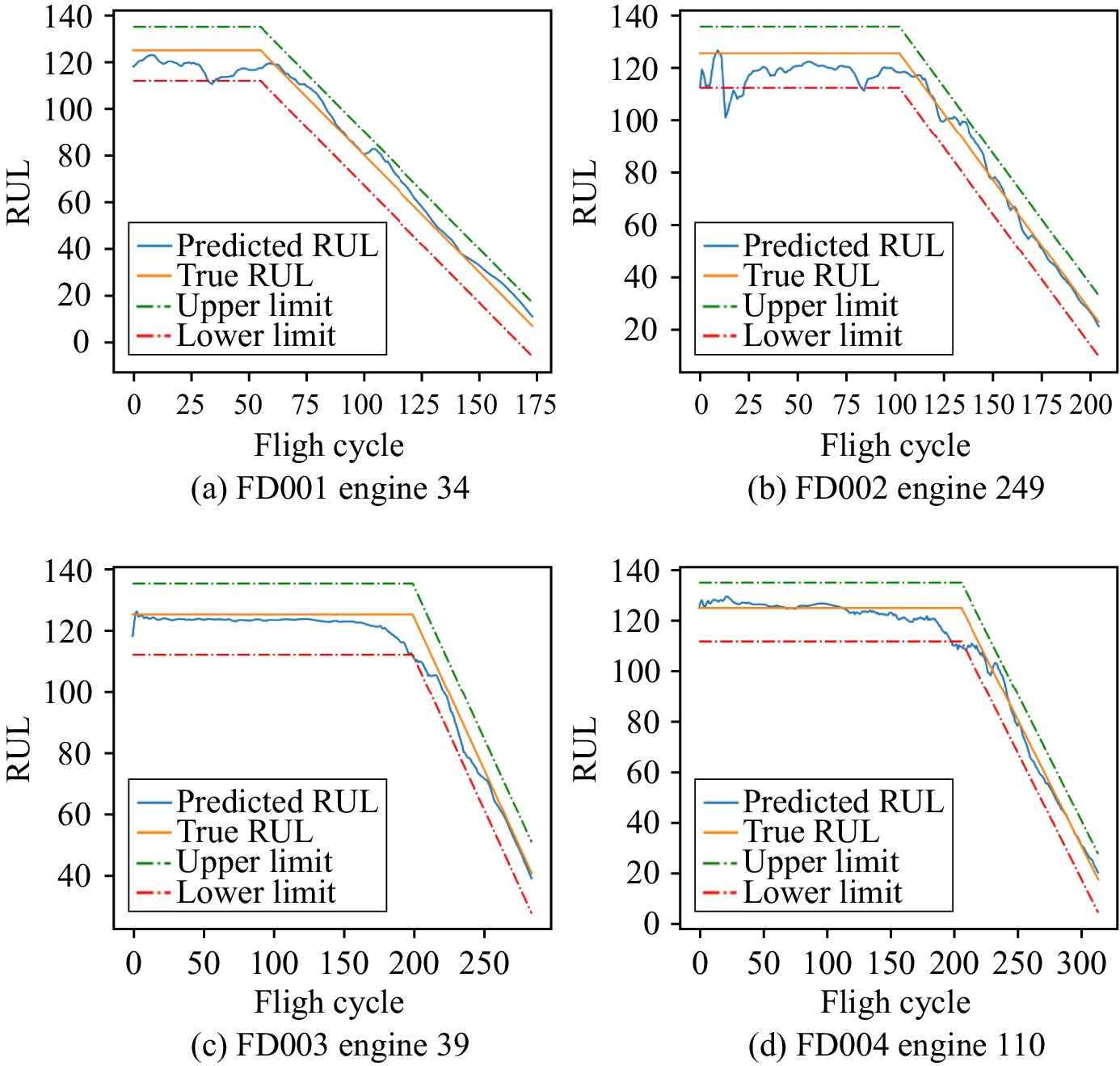
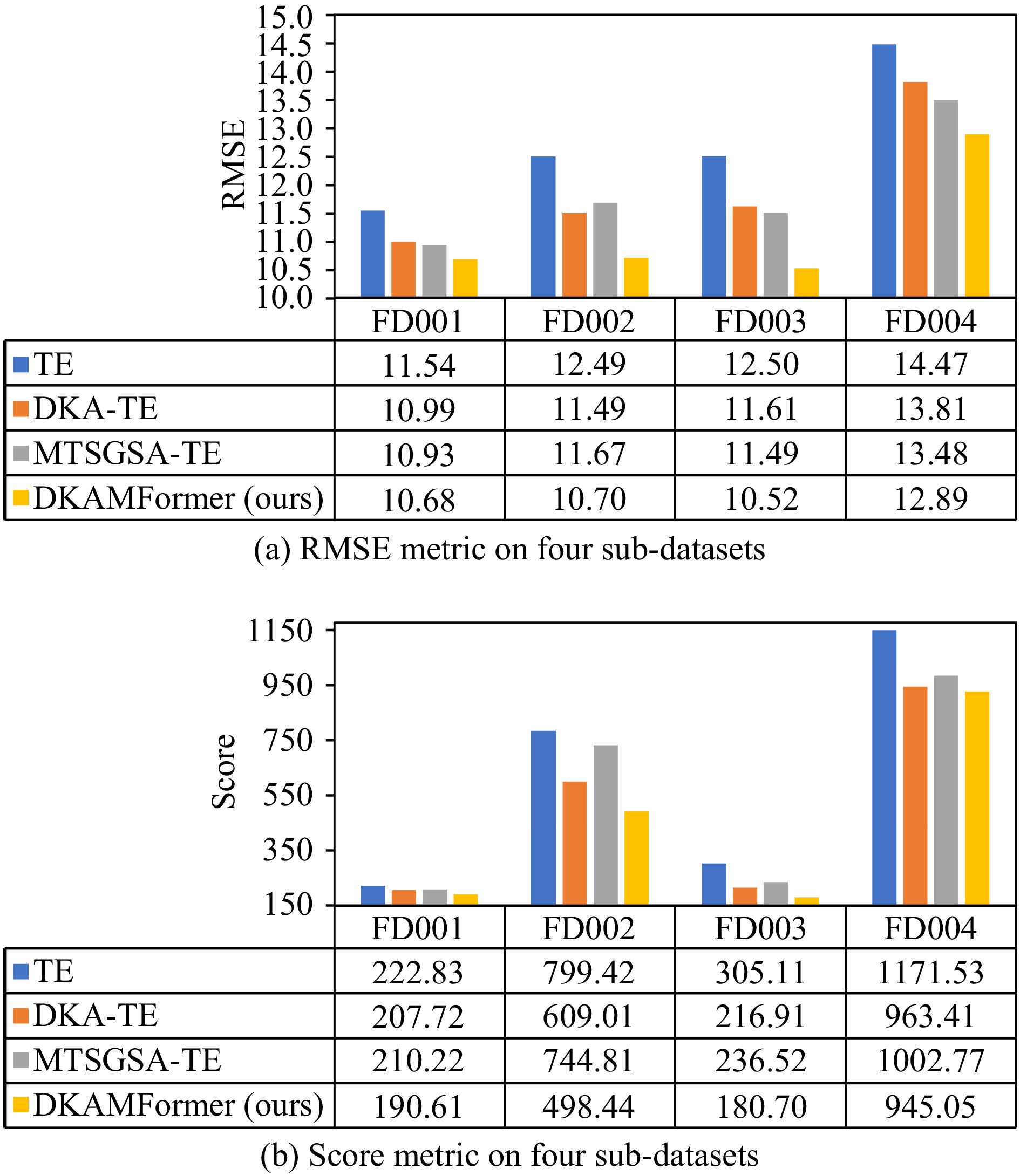
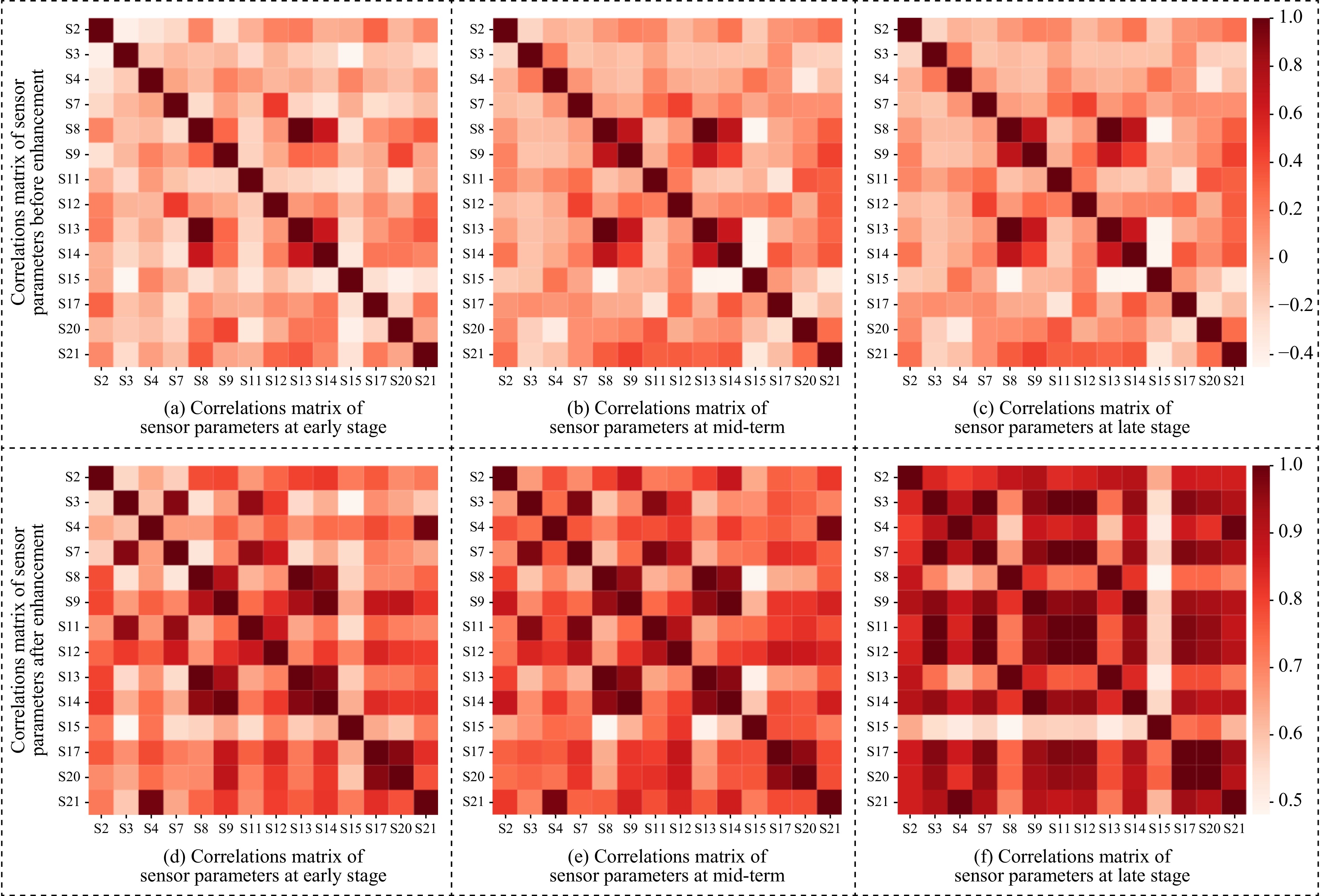
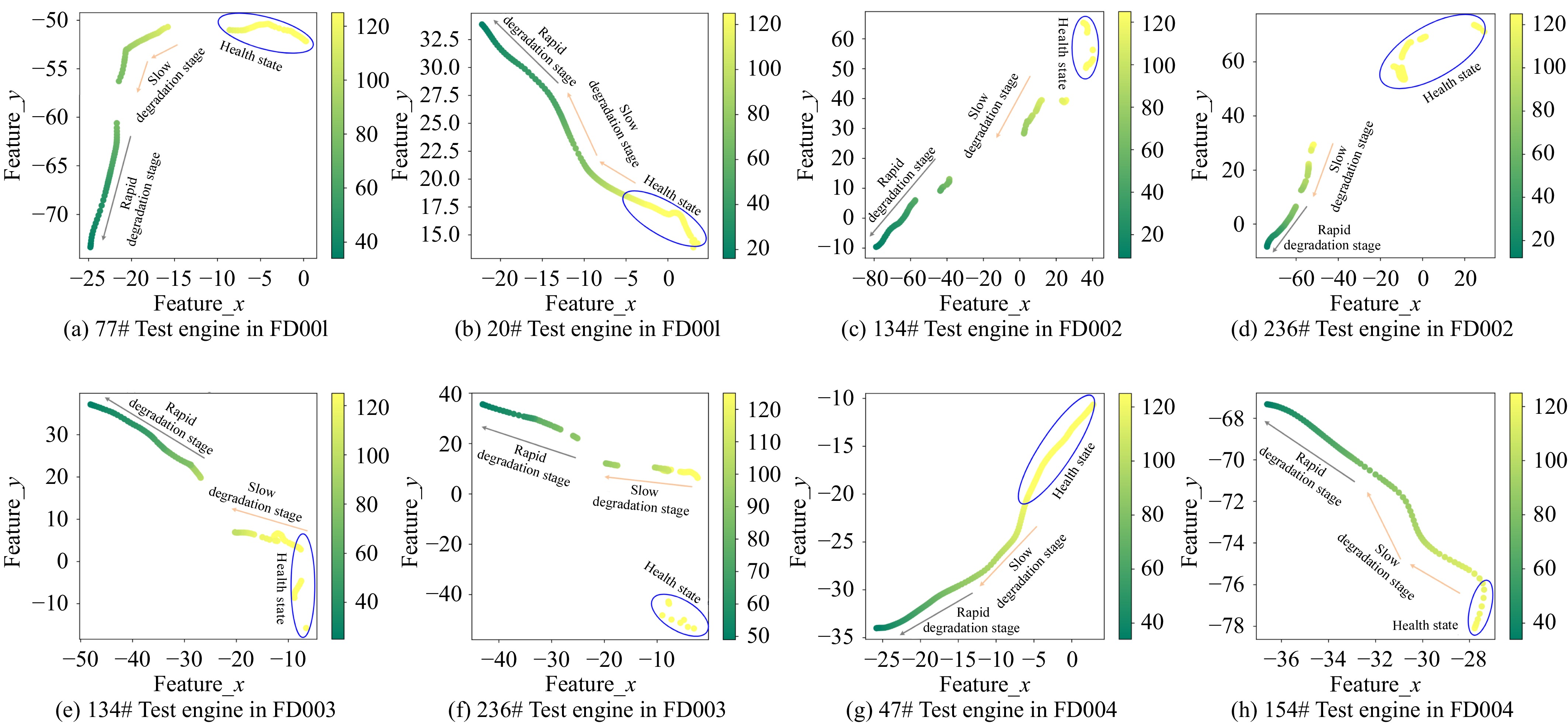
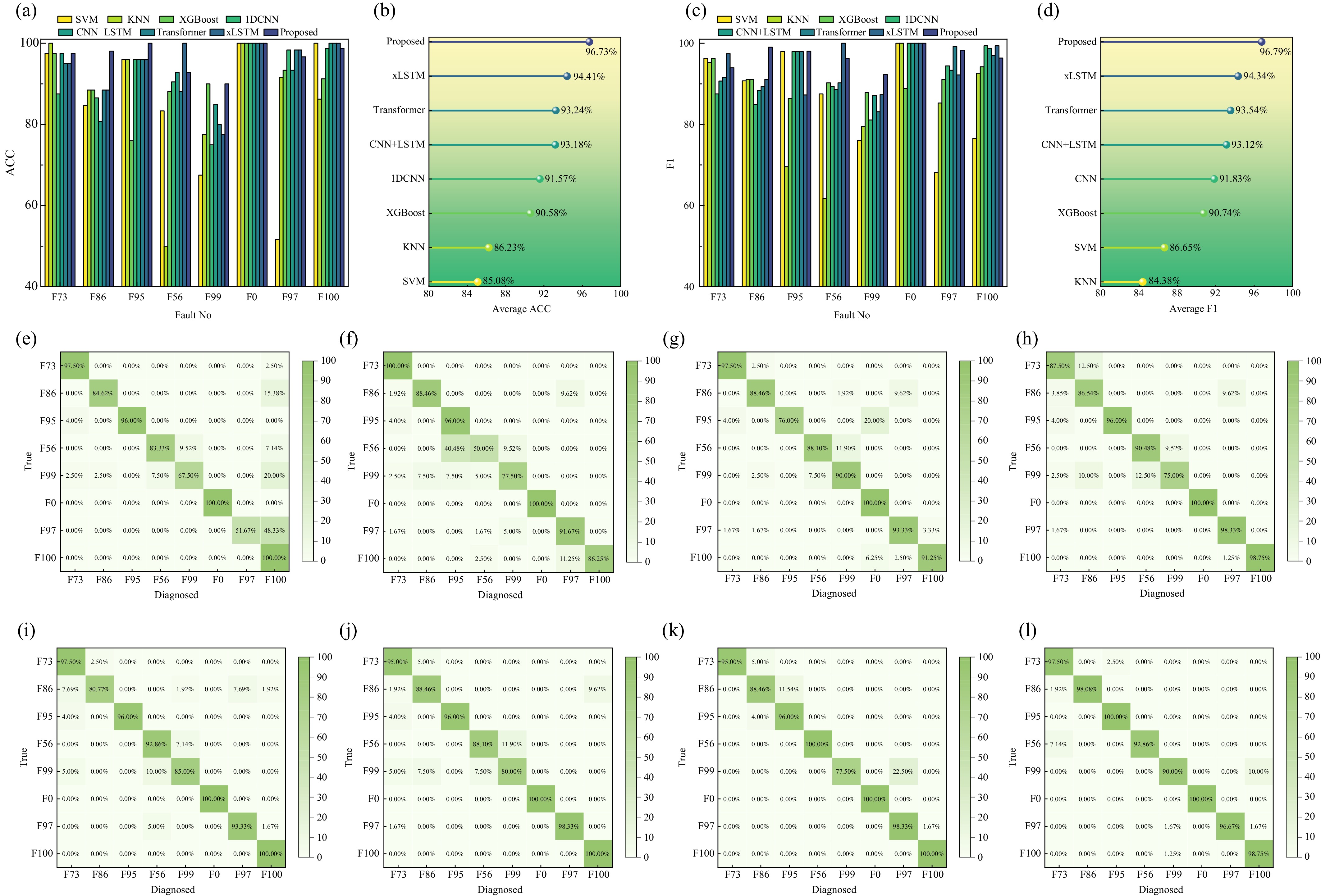
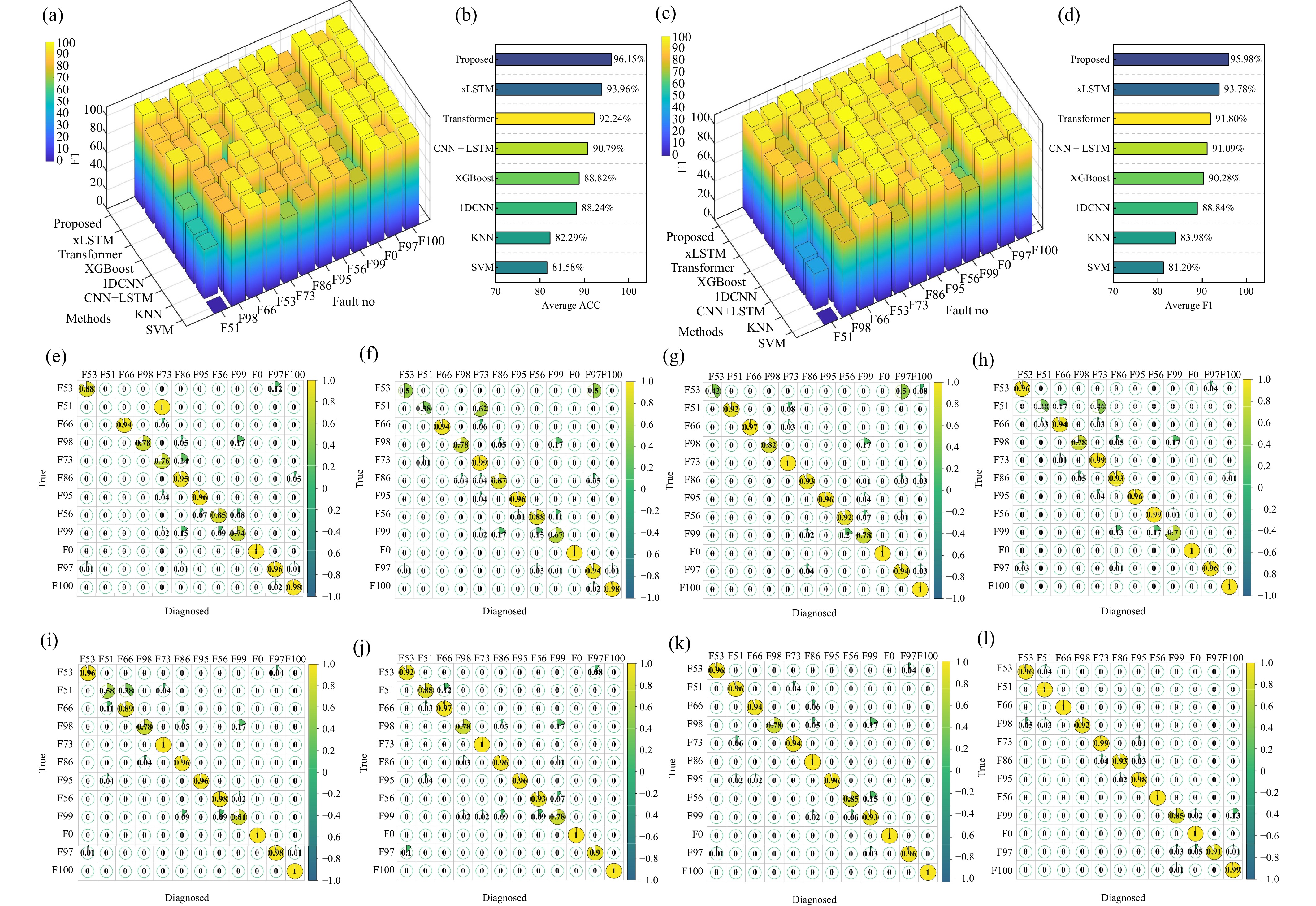
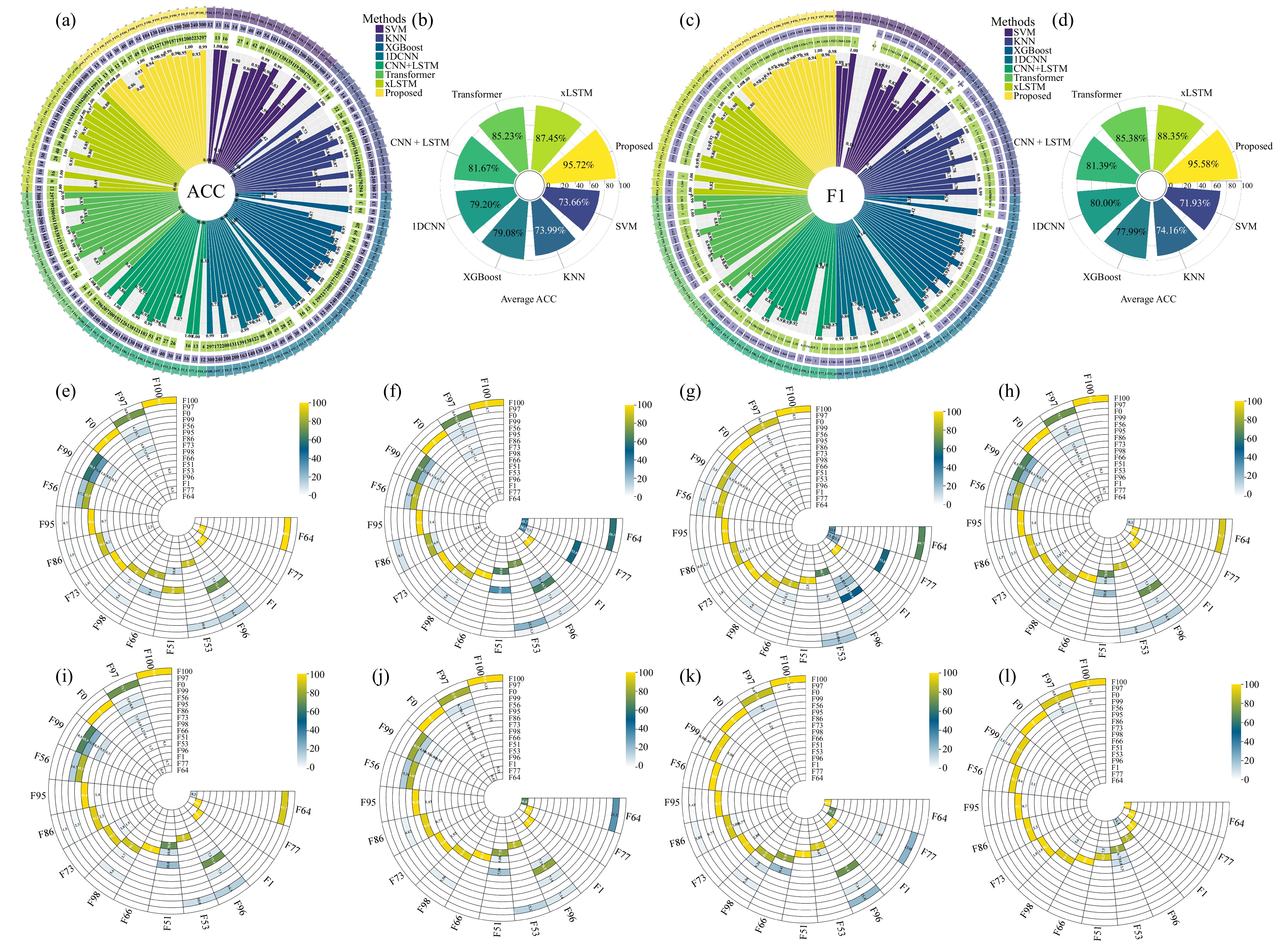
Transformers have achieved promising results on aeroengine remaining useful life (RUL) prediction, but they still have several limitations: 1) Aeroengine domain knowledge, which contains rich information that can reflect the aeroengine’s health statue, is largely ignored in modeling process; 2) Traditional transformer ignores the valuable degradation information from other time scales. To address these issues, a novel domain knowledge-augmented multiscale transformer (DKAMFormer) is developed by integrating domain knowledge and multiscale learning to improve the prognostic performance and reliability. First, to obtain rich and professional aeroengine domain knowledge, multiple detail and complete knowledge graphs (KGs) are established based on the working principle of aeroengine, including aeroengine structure, components working characteristics and sensor parameters. Second, the domain knowledge contained in KGs is convert to embedded vector by KG representative learning, which are then utilized to strengthen and enrich the original multidimensional time-series (MTS) monitoring data, aiming to intergrade domain knowledge and monitoring data to train DKAMFormer. Third, to learn rich and complementary degradation features, a novel multiscale time scale-guided self-attention (MTSGSA) mechanism is designed, which maps original MTS into different time-scale feature spaces, and then employs multiple independent self-attention head to extract the degradation features from different time-scale spaces. Finally, through a series of comparative experiments on the public CMAPSS and N-CMAPSS datasets and compared with 17 SOTA methods, the developed DKAMFormer significantly improves the RUL prediction performance under multiple operation conditions and degradation modes.
S. Fu, Y. Wang, L. Lin, M. Zhao, L. Zu, Y. Lu, F. Guo, S. Suo, Y. Liu, S. Zhang, and S. Zhong, “DKAMFormer: Domain knowledge-augmented multiscale transformer for remaining useful life prediction of aeroengine,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 8, pp. 1610–1635, Aug. 2025. doi: 10.1109/JAS.2025.125126.









 E-mail Alert
E-mail Alert