2024, 11(10): 2099-2110.
doi: 10.1109/JAS.2024.124452
Abstract:
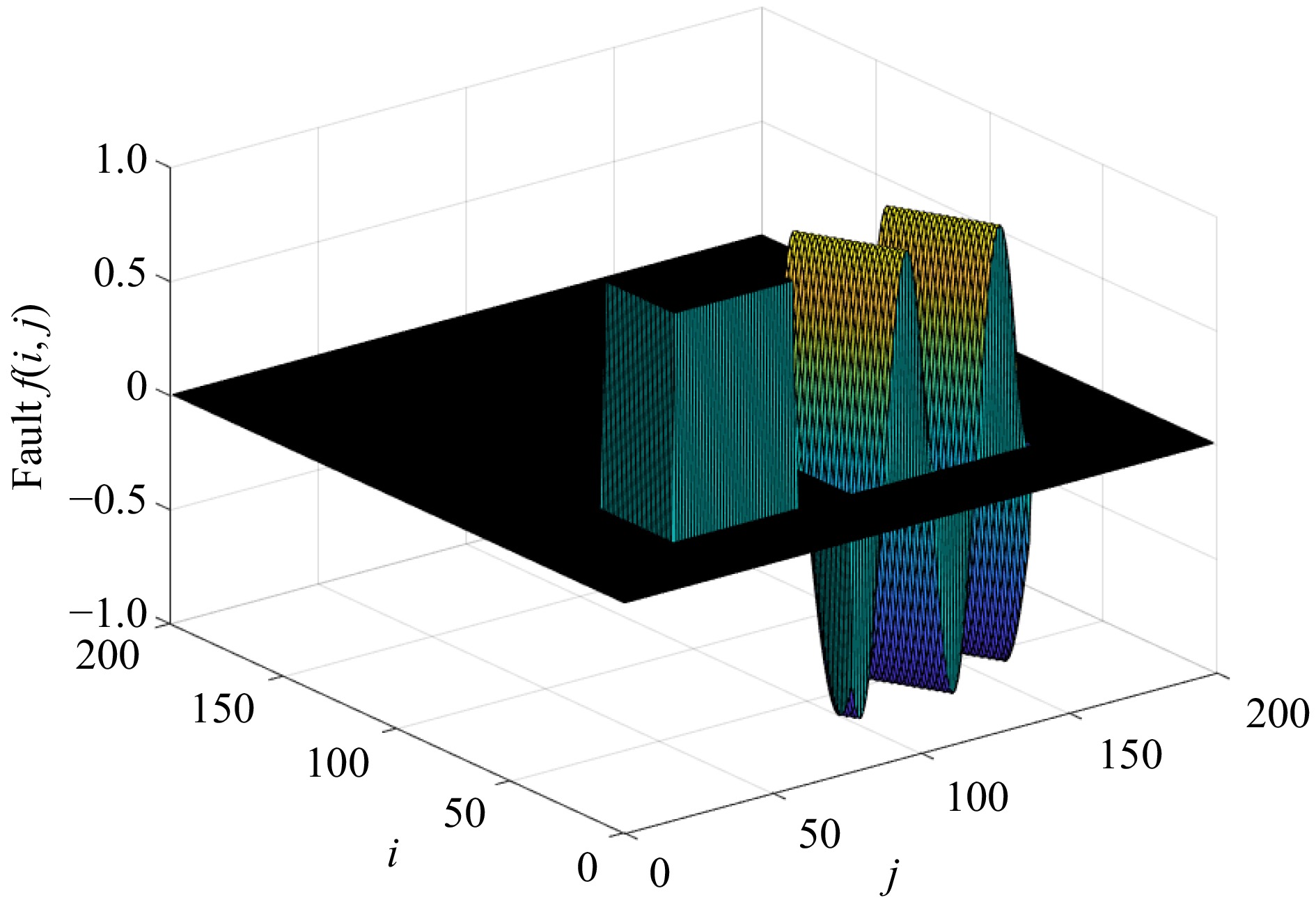
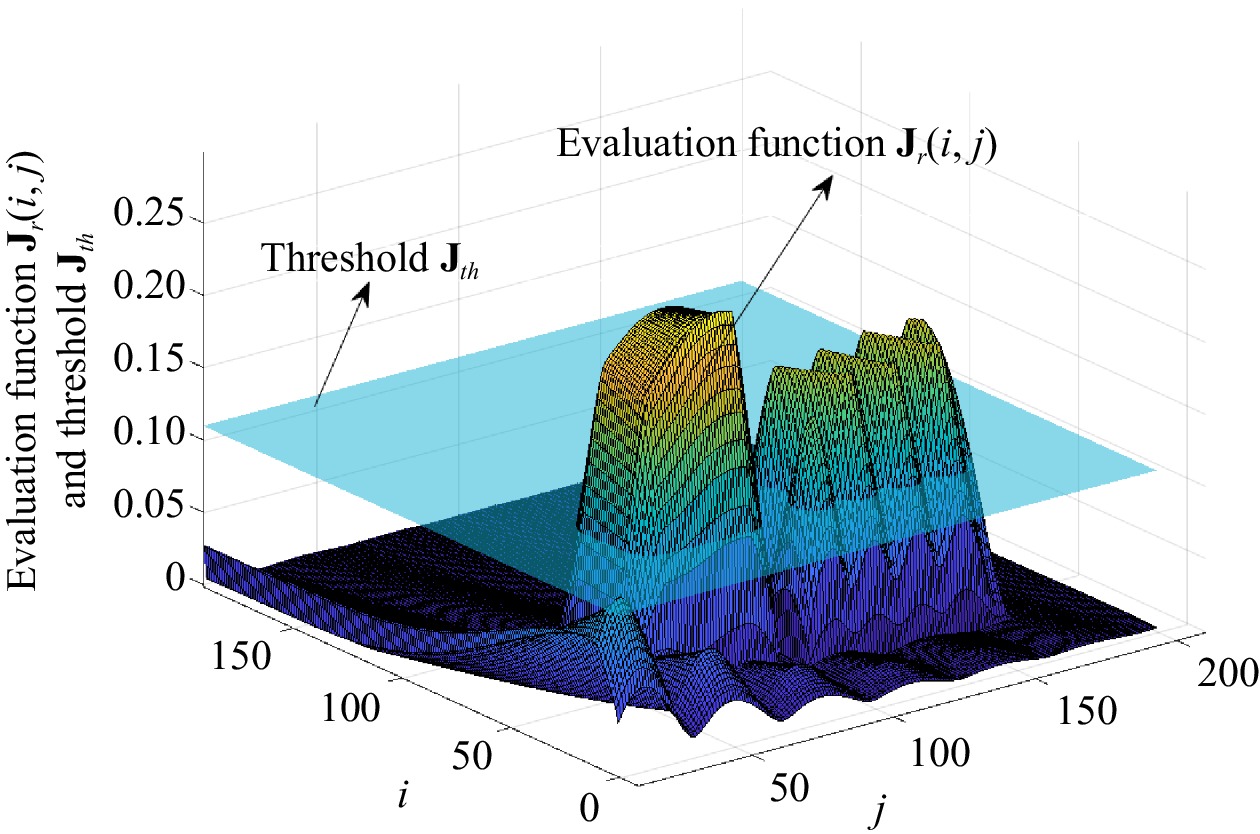
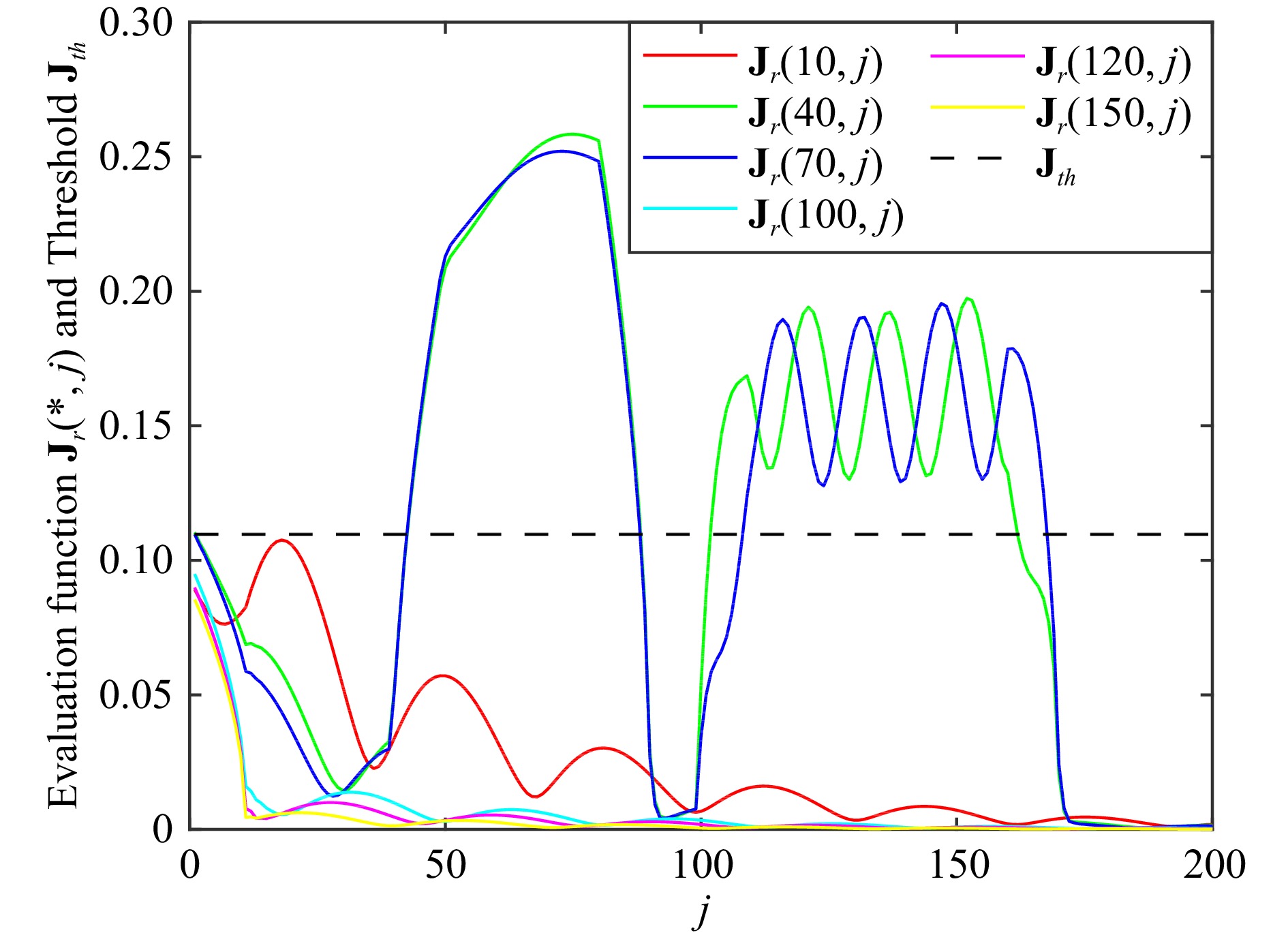
This article studies the fault detection filtering design problem for Roesser type two-dimensional (2-D) nonlinear systems described by uncertain 2-D Takagi-Sugeno (T-S) fuzzy models. Firstly, fuzzy Lyapunov functions are constructed and the 2-D Fourier transform is exploited, based on which a finite frequency fault detection filtering design method is proposed such that a residual signal is generated with robustness to external disturbances and sensitivity to faults. It has been shown that the utilization of available frequency spectrum information of faults and disturbances makes the proposed filtering design method more general and less conservative compared with a conventional non-frequency based filtering design approach. Then, with the proposed evaluation function and its threshold, a novel mixed finite frequency $ {\cal{H}}_{\infty}/{\cal{H}}_{-}$ fault detection algorithm is developed, based on which the fault can be immediately detected once the evaluation function exceeds the threshold. Finally, it is verified with simulation studies that the proposed method is effective and less conservative than conventional non-frequency and/or common Lyapunov function based filtering design methods.
M. Wang, H. Yan, J. Qiu, and W. Ji, “Fuzzy-model-based finite frequency fault detection filtering design for two-dimensional nonlinear systems,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 10, pp. 2099–2110, Oct. 2024. doi: 10.1109/JAS.2024.124452.










 E-mail Alert
E-mail Alert