A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 10
Volume 11
Issue 10
IEEE/CAA Journal of Automatica Sinica
| Citation: | Z. Li, Y. Wang, and Y. Song, “Achieving given precision within prescribed time yet with guaranteed transient behavior via output based event-triggered control,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 10, pp. 2059–2067, Oct. 2024. doi: 10.1109/JAS.2023.124134

|
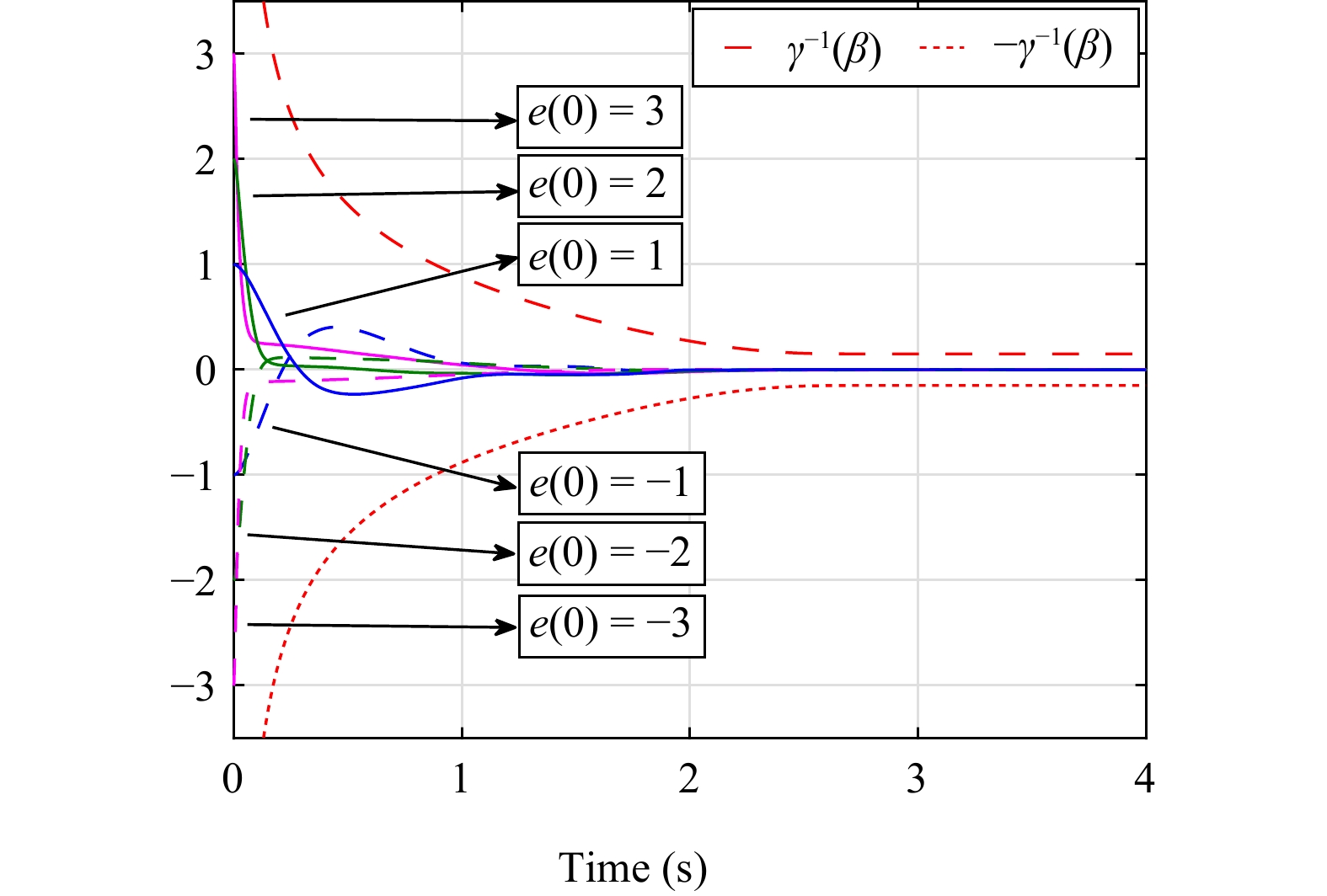
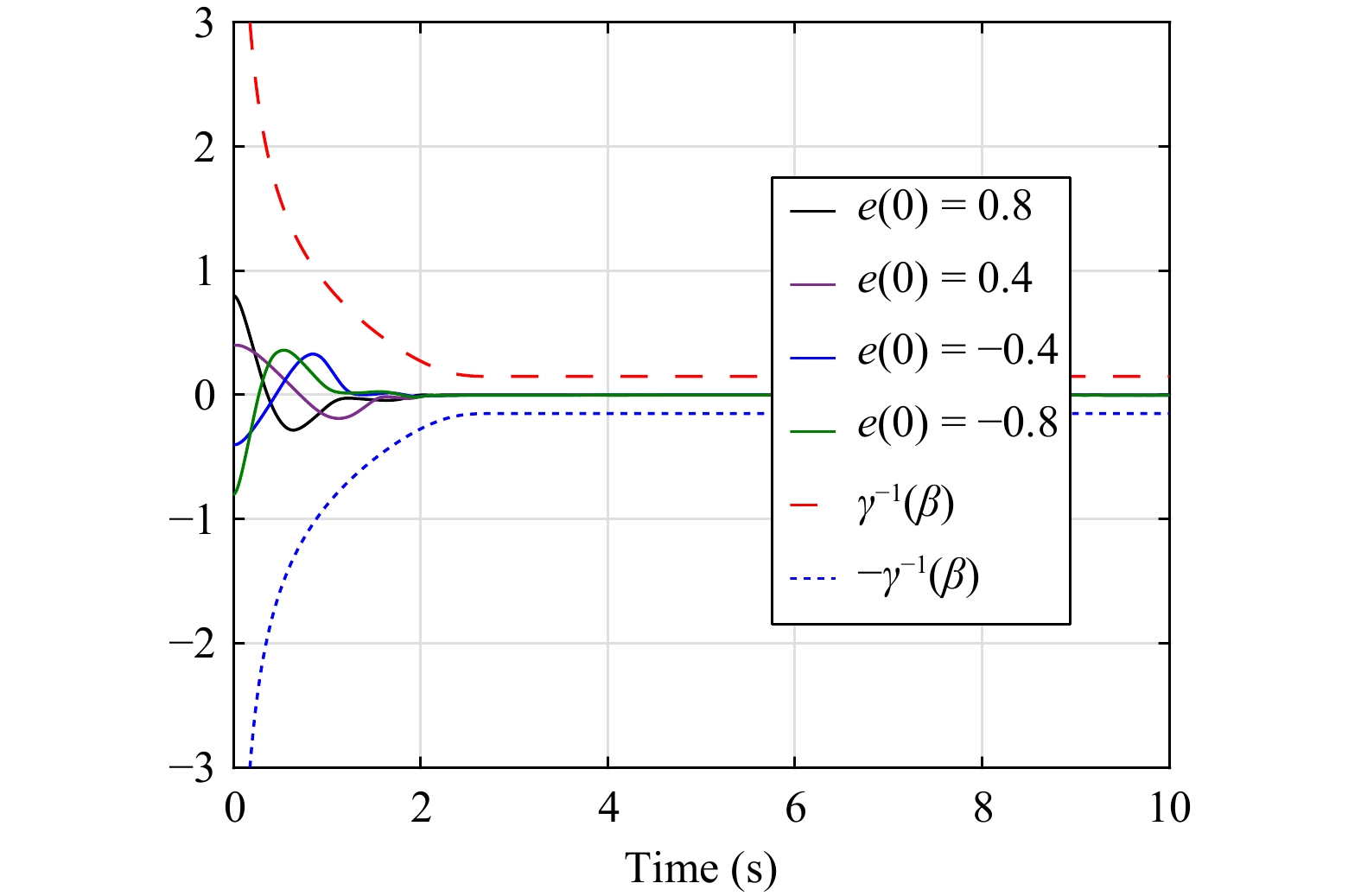
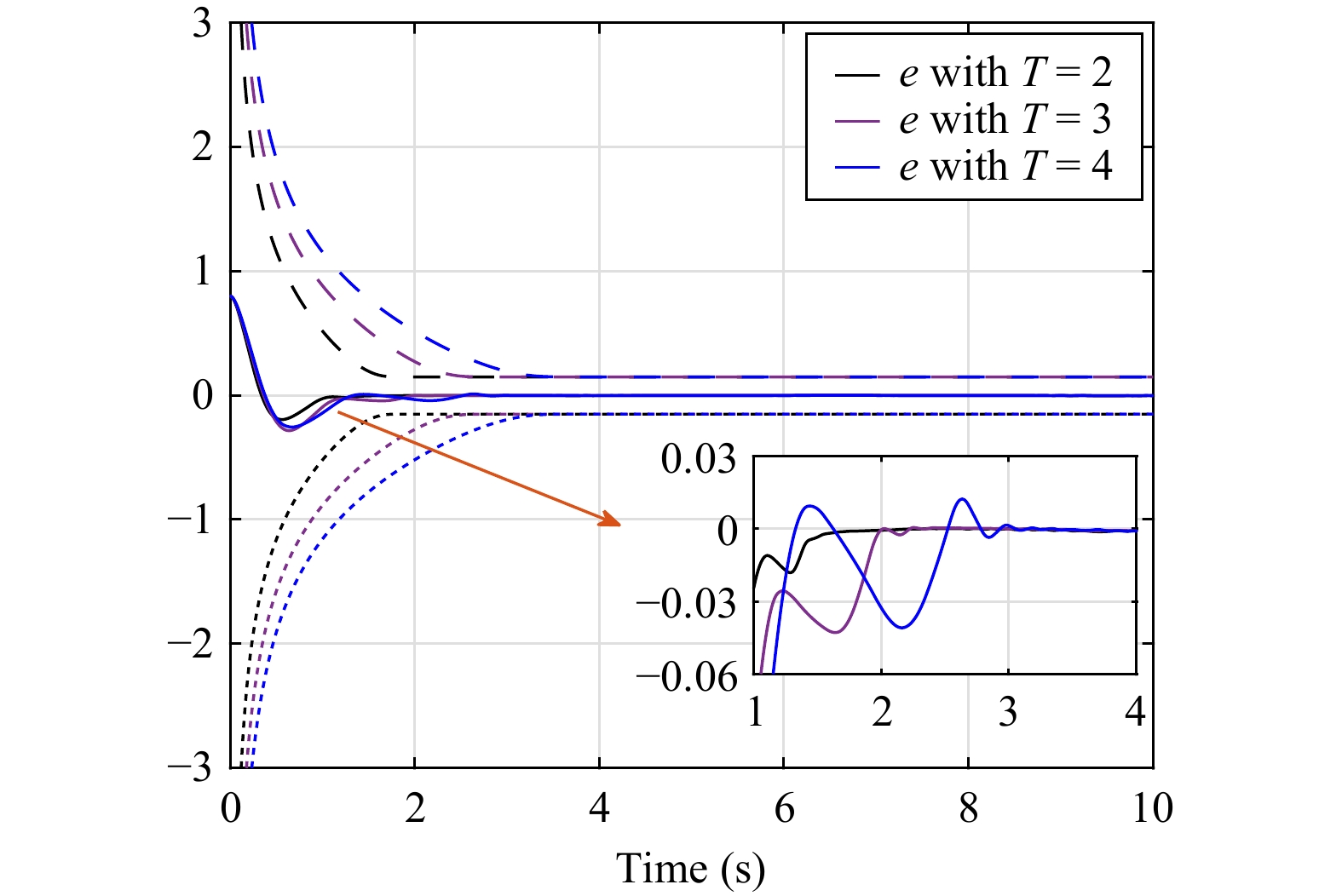
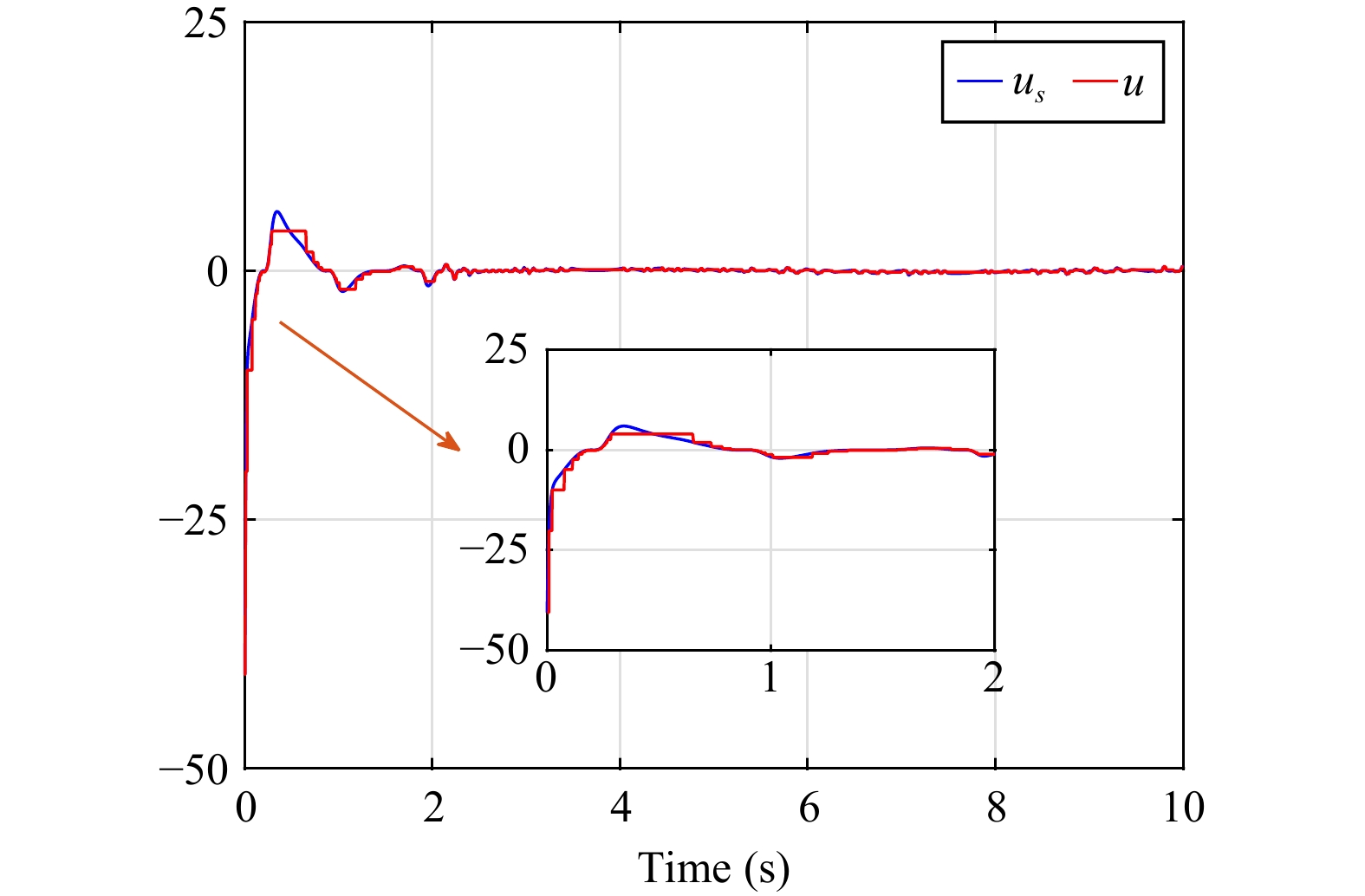
It is interesting yet nontrivial to achieve given control precision within user-assignable time for uncertain nonlinear systems. The underlying problem becomes even more challenging if the transient behavior also needs to be accommodated and only system output is available for feedback. Several key design innovations are proposed to circumvent the aforementioned technical difficulties, including the employment of state estimation filters with event-triggered mechanism, the construction of a novel performance scaling function and an error transformation. In contrast to most existing performance based works where the stability is contingent on initial conditions and the maximum allowable steady-state tracking precision can only be guaranteed at some unknown (theoretically infinite) time, in this work the output of the system is ensured to synchronize with the desired trajectory with arbitrarily pre-assignable convergence rate and arbitrarily pre-specified precision within prescribed time, using output only with lower cost of sensing and communication. In addition, all the closed-loop signals are ensured to be globally uniformly bounded under the proposed control method. The merits of the designed control scheme are confirmed by numerical simulation on a ship model.

| [1] |
C. P. Bechlioulis and G. A. Rovithakis, “Robust adaptive control of feedback linearizable mimo nonlinear systems with prescribed performance,” IEEE Trans. Autom. Control, vol. 53, no. 9, pp. 2090–2099, Oct. 2008. doi: 10.1109/TAC.2008.929402
|
| [2] |
C. P. Bechlioulis and G. A. Rovithakis, “Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems,” Automatica, vol. 45, no. 2, pp. 532–538, Feb. 2009. doi: 10.1016/j.automatica.2008.08.012
|
| [3] |
W. Wang and C. Wen, “Adaptive actuator failure compensation control of uncertain nonlinear systems with guaranteed transient performance,” Automatica, vol. 46, no. 12, pp. 2082–2091, Dec. 2010. doi: 10.1016/j.automatica.2010.09.006
|
| [4] |
C. P. Bechlioulis and G. A. Rovithakis, “A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems,” Automatica, vol. 50, no. 4, pp. 1217–1226, Apr. 2014. doi: 10.1016/j.automatica.2014.02.020
|
| [5] |
Y. Song, Y. Wang, and C. Wen, “Adaptive fault-tolerant PI tracking control with guaranteed transient and steady-state performance,” IEEE Trans. Autom. Control, vol. 62, no. 1, pp. 481–487, Jan. 2017. doi: 10.1109/TAC.2016.2554362
|
| [6] |
Y. Li, S. Tong, L. Liu, and G. Feng, “Adaptive output-feedback control design with prescribed performance for switched nonlinear systems,” Automatica, vol. 80, pp. 225–231, Jan. 2017. doi: 10.1016/j.automatica.2017.02.005
|
| [7] |
Y. Yang, J. Tan, and D. Yue, “Prescribed performance control of one-DOF link manipulator with uncertainties and input saturation,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 148–157, Jan. 2019. doi: 10.1109/JAS.2018.7511099
|
| [8] |
M. Lv, B. De Schutter, J. Cao, and S. Baldi, “Adaptive prescribed performance asymptotic tracking for high-order odd-rational-power nonlinear systems,” IEEE Trans. Autom. Control, vol. 68, no. 2, pp. 1047–1053, Feb. 2023. doi: 10.1109/TAC.2022.3147271
|
| [9] |
K. Zhao, Y. Song, C. P. Chen, and L. Chen, “Adaptive asymptotic tracking with global performance for nonlinear systems with unknown control directions,” IEEE Trans. Autom. Control, vol. 67, no. 3, pp. 1566–1573, Mar. 2022. doi: 10.1109/TAC.2021.3074899
|
| [10] |
K. Zhao, C. Wen, Y. Song, and F. L. Lewis, “Adaptive uniform performance control of strict-feedback nonlinear systems with time-varying control gain,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 451–461, Feb. 2023. doi: 10.1109/JAS.2022.106064
|
| [11] |
G. Liu, J. H. Park, H. Xu, and C. Hua, “Reduced-order observer-based output-feedback tracking control for nonlinear time-delay systems with global prescribed performance,” IEEE Trans. Cyber., vol. 53, no. 9, pp. 5560–5571, Sept. 2023. doi: 10.1109/TCYB.2022.3158932
|
| [12] |
B. Ning, Q.-L. Han, Z. Zuo, J. Jin, and J. Zheng, “Collective behaviors of mobile robots beyond the nearest neighbor rules with switching topology,” IEEE Trans. Cyber., vol. 48, no. 5, pp. 1577–1590, May 2018. doi: 10.1109/TCYB.2017.2708321
|
| [13] |
P. Ning, C. Hua, K. Li, and R. Meng, “A blow-up function approach to global event-triggered prescribed tracking output feedback control of nonlinear systems,” IEEE Trans. Circuits and Systems-I: Regular Papers, vol. 69, no. 10, pp. 4225–4236, Oct. 2022. doi: 10.1109/TCSI.2022.3184850
|
| [14] |
S. Zhou, X. Wang, and Y. Song, “Prescribed performance tracking control under uncertain initial conditions: A neuroadaptive output feedback approach,” IEEE Trans. Cyber., vol. 53, no. 11, pp. 7213–7223, 202. doi: 10.1109/TCYB.2022.3192356
|
| [15] |
M. Donkers and W. Heemels, “Output-based event-triggered control with guaranteed $ {\cal{L}}_\infty$-gain and improved and decentralized event-triggering,” IEEE Trans. Autom. Control, vol. 57, no. 6, pp. 1362–1376, Jan. 2012. doi: 10.1109/TAC.2011.2174696
|
| [16] |
L. Xing, C. Wen, Z. Liu, H. Su, and J. Cai, “Event-triggered adaptive control for a class of uncertain nonlinear systems,” IEEE Trans. Autom. Control, vol. 62, no. 4, pp. 2071–2076, Apr. 2017. doi: 10.1109/TAC.2016.2594204
|
| [17] |
L. Wu, Y. Gao, J. Liu, and H. Li, “Event-triggered sliding mode control of stochastic systems via output feedback,” Automatica, vol. 82, pp. 79–92, Aug. 2017. doi: 10.1016/j.automatica.2017.04.032
|
| [18] |
L. Xing, C. Wen, Z. Liu, H. Su, and J. Cai, “Event-triggered output feedback control for a class of uncertain nonlinear systems,” IEEE Trans. Autom. Control, vol. 64, no. 1, pp. 290–297, Jan. 2019. doi: 10.1109/TAC.2018.2823386
|
| [19] |
I. Ahmad, X. Ge, and Q.-L. Han, “Decentralized dynamic event-triggered communication and active suspension control of in-wheel motor driven electric vehicles with dynamic damping,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 971–986, May 2021. doi: 10.1109/JAS.2021.1003967
|
| [20] |
P. Zhang, T. Liu, and Z. Jiang, “Tracking control of unicycle mobile robots with event-triggered and self-triggered feedback,” IEEE Trans. Autom. Control, vol. 68, no. 4, pp. 2264–2276, Apr. 2023.
|
| [21] |
K. Sun, J. Qiu, H. R. Karimi, and Y. Fu, “Event-triggered robust fuzzy adaptive finite-time control of nonlinear systems with prescribed performance,” IEEE Trans. Fuzzy Systems, vol. 29, no. 6, pp. 1460–1471, Jan. 2021. doi: 10.1109/TFUZZ.2020.2979129
|
| [22] |
H. Ma, Q. Zhou, H. Li, and R. Lu, “Adaptive prescribed performance control of a flexible-joint robotic manipulator with dynamic uncertainties,” IEEE Trans. Cyber., vol. 52, no. 12, pp. 12905–12915, Dec. 2022. doi: 10.1109/TCYB.2021.3091531
|
| [23] |
X. Hu, Y.-X. Li, S. Tong, and Z. Hou, “Event-triggered adaptive fuzzy asymptotic tracking control of nonlinear pure-feedback systems with prescribed performance,” IEEE Trans. Cyber., vol. 53, no. 4, pp. 2380–2390, Apr. 2023. doi: 10.1109/TCYB.2021.3118835
|
| [24] |
J. Qiu, K. Sun, T. Wang, and H. Gao, “Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance,” IEEE Trans. Fuzzy Systems, vol. 27, no. 11, pp. 2152–2162, Nov. 2019. doi: 10.1109/TFUZZ.2019.2895560
|
| [25] |
M. Krstic, P. V. Kokotovic, and I. Kanellakopoulos, Nonlinear and Adaptive Control Design. John Wiley & Sons, Inc., 1995.
|
| [26] |
A. Ilchmann, E. P. Ryan, and P. Townsend, “Tracking control with prescribed transient behaviour for systems of known relative degree,” Systems &Control Letters, vol. 55, no. 5, pp. 396–406, 2006.
|
| [27] |
C. Wen, J. Zhou, Z. Liu, and H. Su, “Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance,” IEEE Trans. Autom. Control, vol. 56, no. 7, pp. 1672–1678, Jul. 2011. doi: 10.1109/TAC.2011.2122730
|
| [28] |
C. Wang, C. Wen, and Y. Lin, “Adaptive actuator failure compensation for a class of nonlinear systems with unknown control direction,” IEEE Trans. Autom. Control, vol. 62, no. 1, pp. 385–392, Jan. 2017. doi: 10.1109/TAC.2016.2524202
|
| [29] |
Z. Li and Y. Wang, “Finite-time tracking for state-constrained strict-feedback systems without feasibility conditions,” Int. J. Robust and Nonlinear Control, vol. 32, no. 10, pp. 6002–6016, Jul. 2022. doi: 10.1002/rnc.6118
|
| [30] |
Z. Li, Y. Wang, Y. Song, and W. Ao, “Global consensus tracking control for high-order nonlinear multiagent systems with prescribed performance,” IEEE Trans. Cyber., vol. 53, no. 10, pp. 6529–6537, Oct. 2023. doi: 10.1109/TCYB.2022.3211995
|
| [31] |
P. Ning, C. Hua, K. Li, and R. Meng, “Event-triggered control for nonlinear uncertain systems via a prescribed-time approach,” IEEE Trans. Autom. Control, vol. 68, no. 11, pp. 6975–6981, Nov. 2023. doi: 10.1109/TAC.2023.3243863
|
| [32] |
B. Ren, P. P. San, S. S. Ge, and T. H. Lee, “Adaptive dynamic surface control for a class of strict-feedback nonlinear systems with unknown backlash-like hysteresis,” in Proc. IEEE American Control Conf., 2009, pp. 4482–4487.
|
| [33] |
C. Zhang and G. Yang, “Event-triggered adaptive output feedback control for a class of uncertain nonlinear systems with actuator failures,” IEEE Trans. Cyber., vol. 50, no. 1, pp. 201–210, Jan. 2020. doi: 10.1109/TCYB.2018.2868169
|
| [34] |
L. Xing and C. Wen, “Dynamic event-triggered adaptive control for a class of uncertain nonlinear systems,” Automatica, vol. 158, p. 111286, Dec. 2023. doi: 10.1016/j.automatica.2023.111286
|
| [35] |
H. Kaufman, I. Barkana, and K. Sobel, Direct Adaptive Control Algorithms: Theory and Applications. Springer Science & Business Media, 2012.
|
| [36] |
G. Wang, Z. Zuo, and C. Wang, “Robust consensus control of second-order uncertain multiagent systems with velocity and input constraints,” Automatica, vol. 157, p. 111226, Nov. 2023. doi: 10.1016/j.automatica.2023.111226
|
| [37] |
B. Ning, Q.-L. Han, Z. Zuo, L. Ding, Q. Lu, and X. Ge, “Fixed-time and prescribed-time consensus control of multiagent systems and its applications: A survey of recent trends and methodologies,” IEEE Trans. Industrial Informatics, vol. 19, no. 2, pp. 1121–1135, Feb. 2023. doi: 10.1109/TII.2022.3201589
|
Figures(8)






 DownLoad:
DownLoad: