2022, 9(8): 1384-1405.
doi: 10.1109/JAS.2022.105740
Abstract:
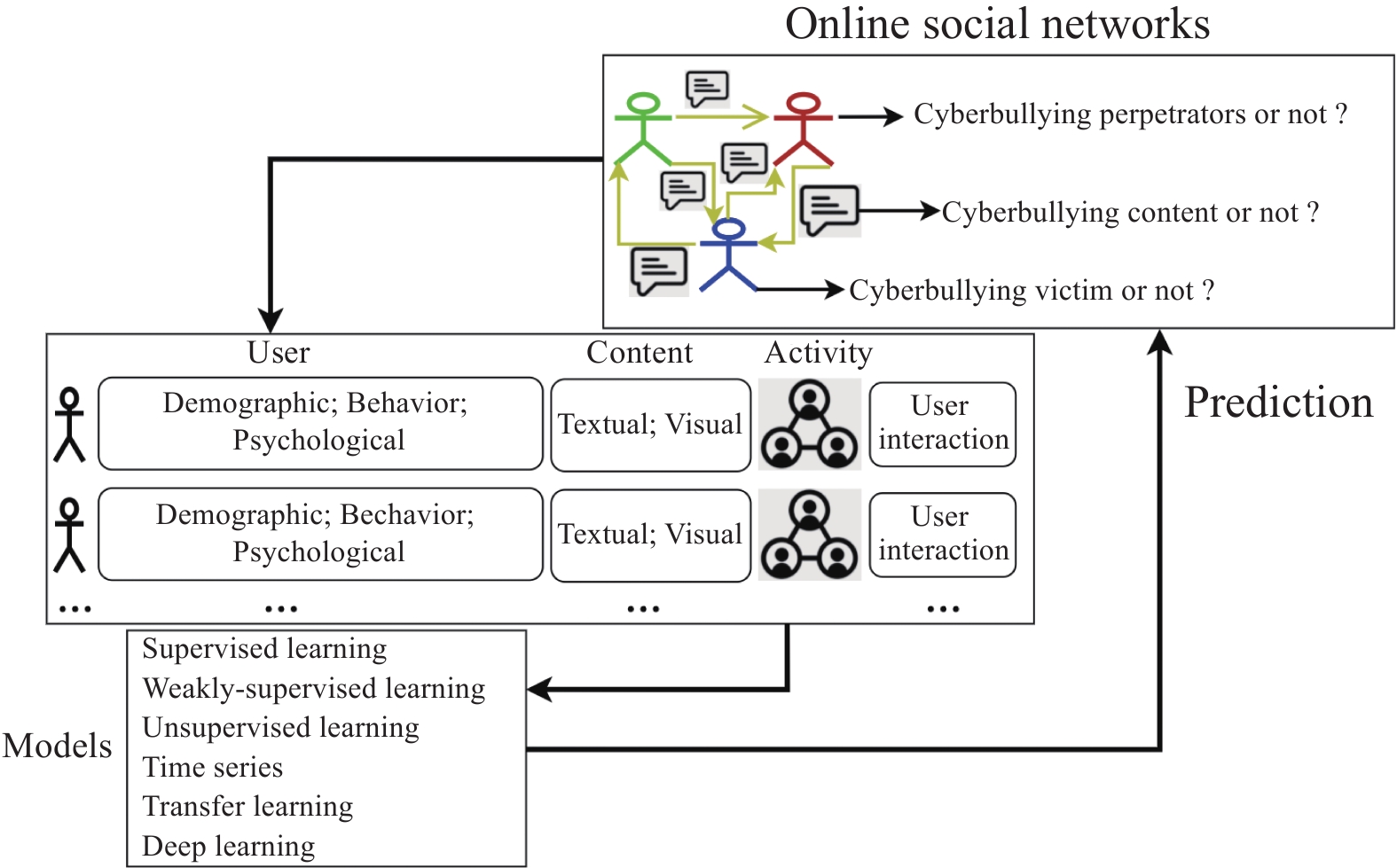
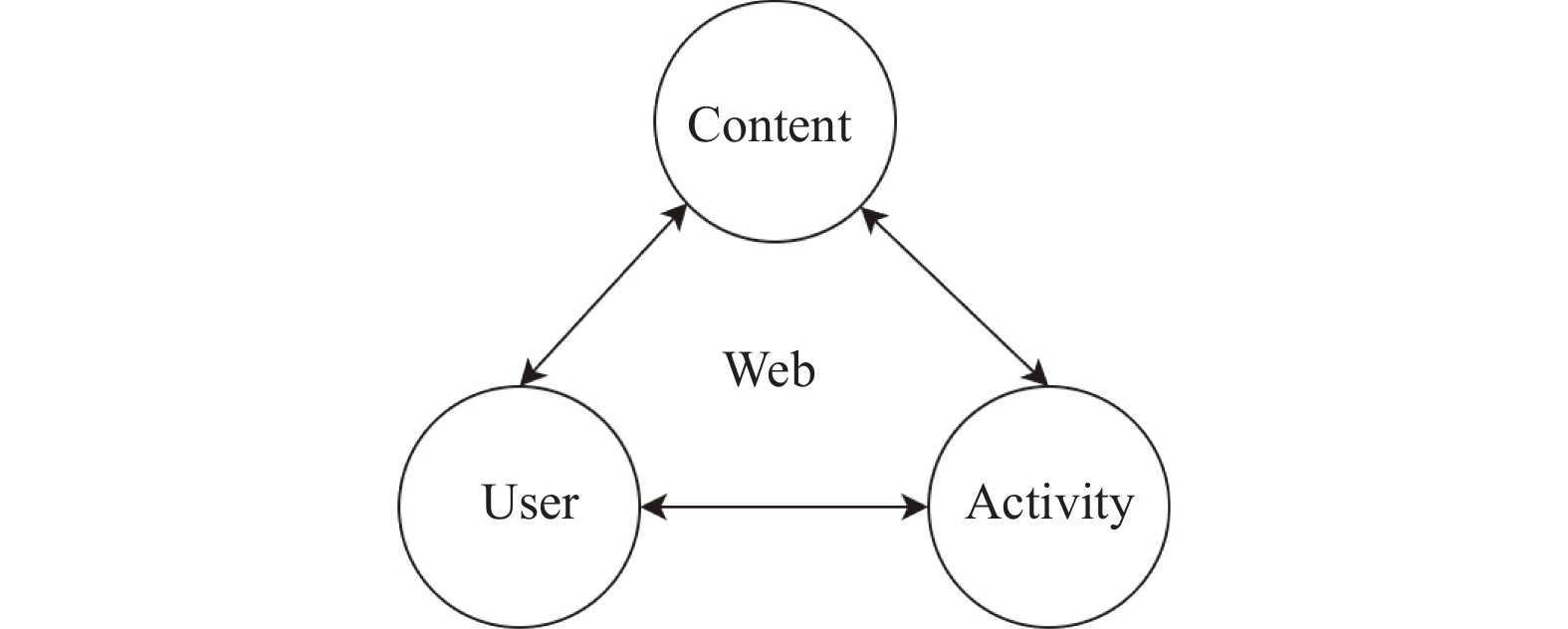
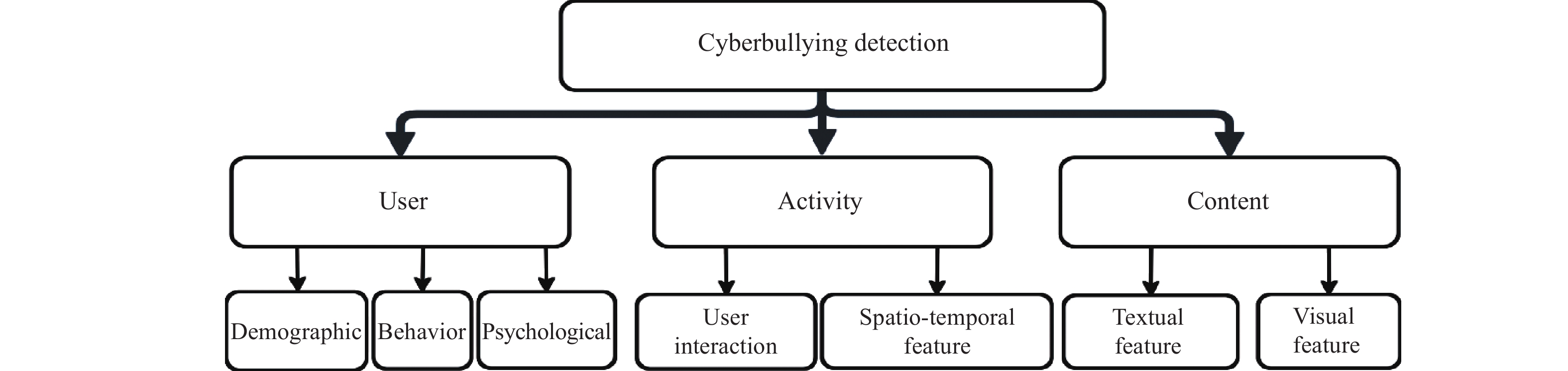
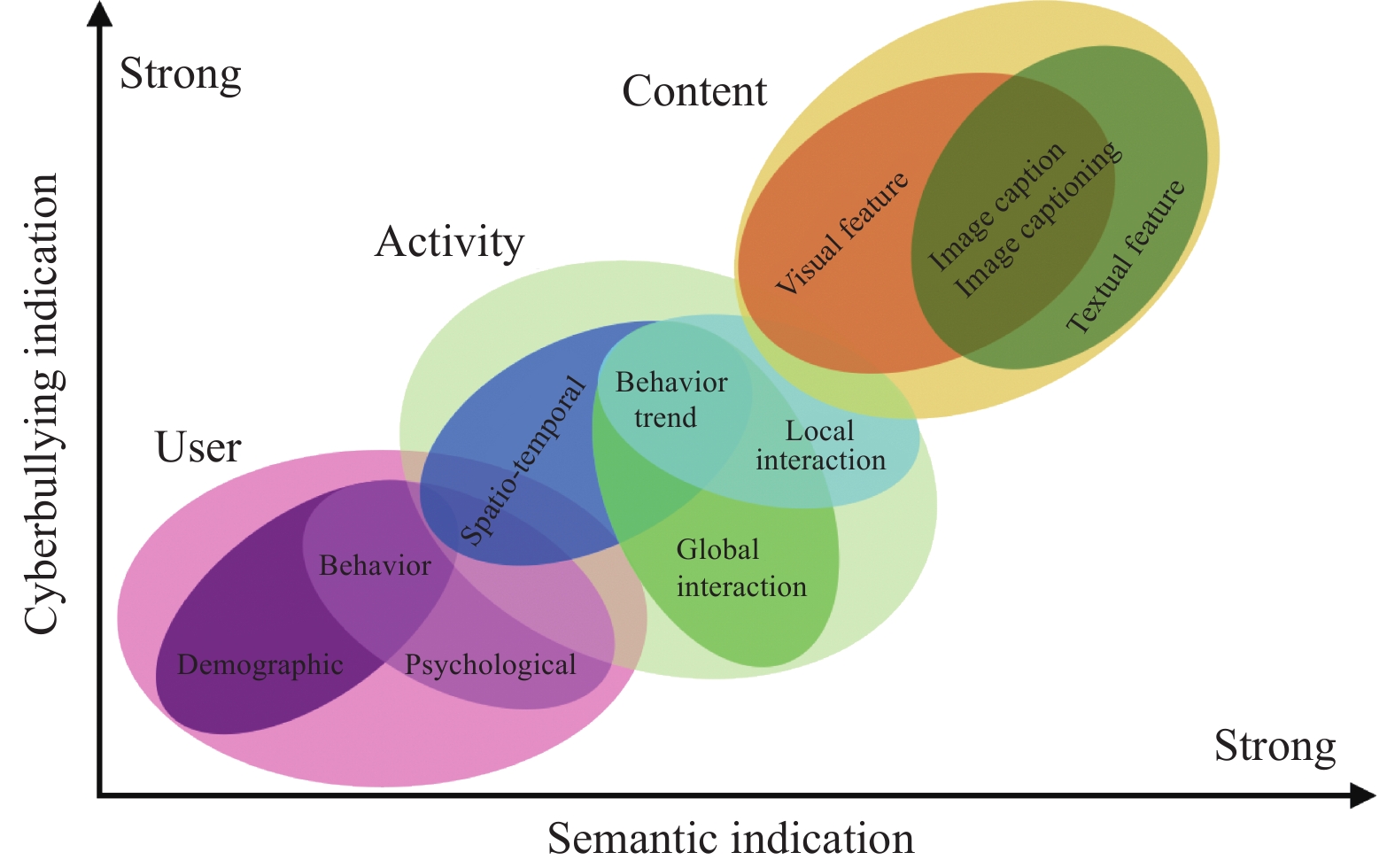
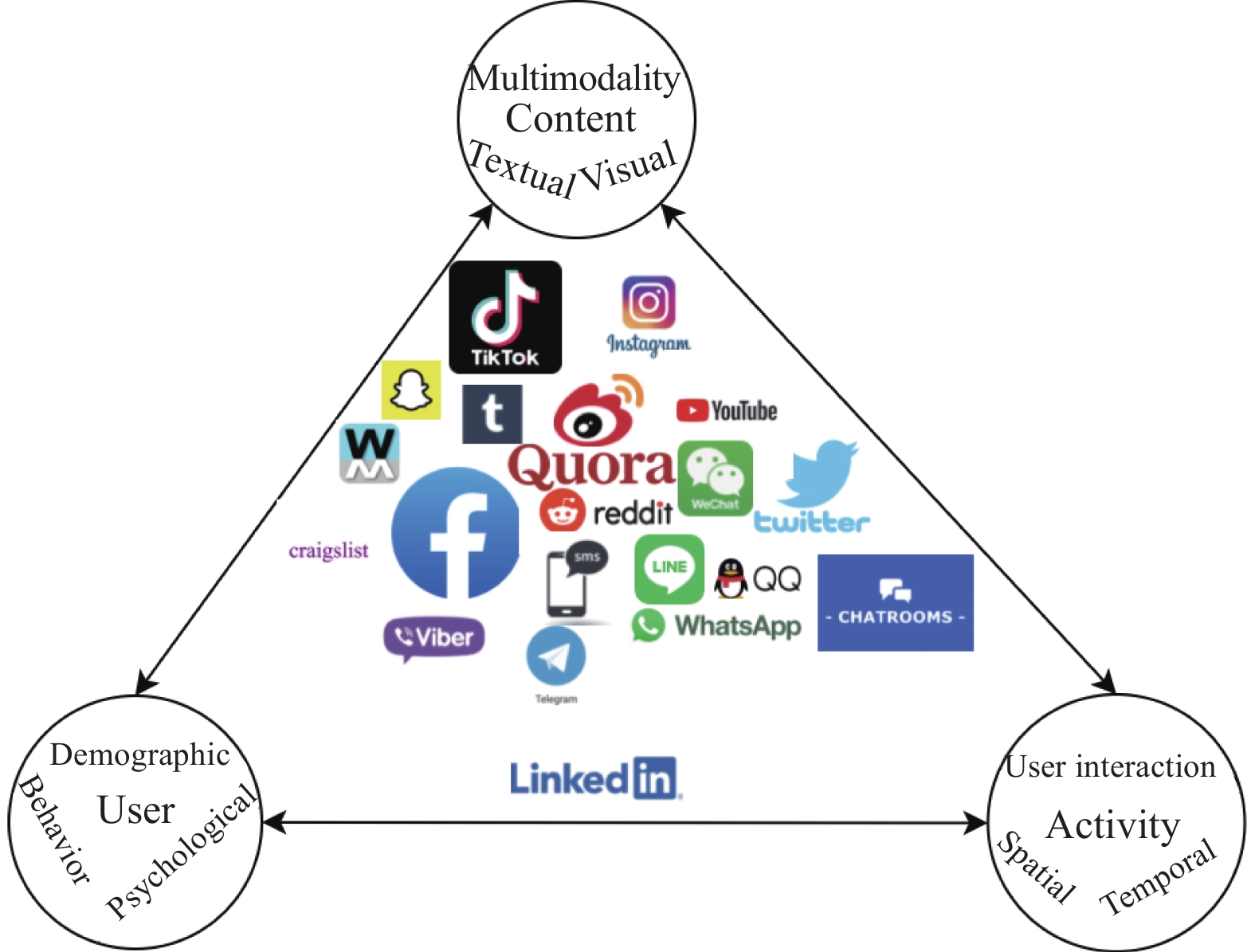
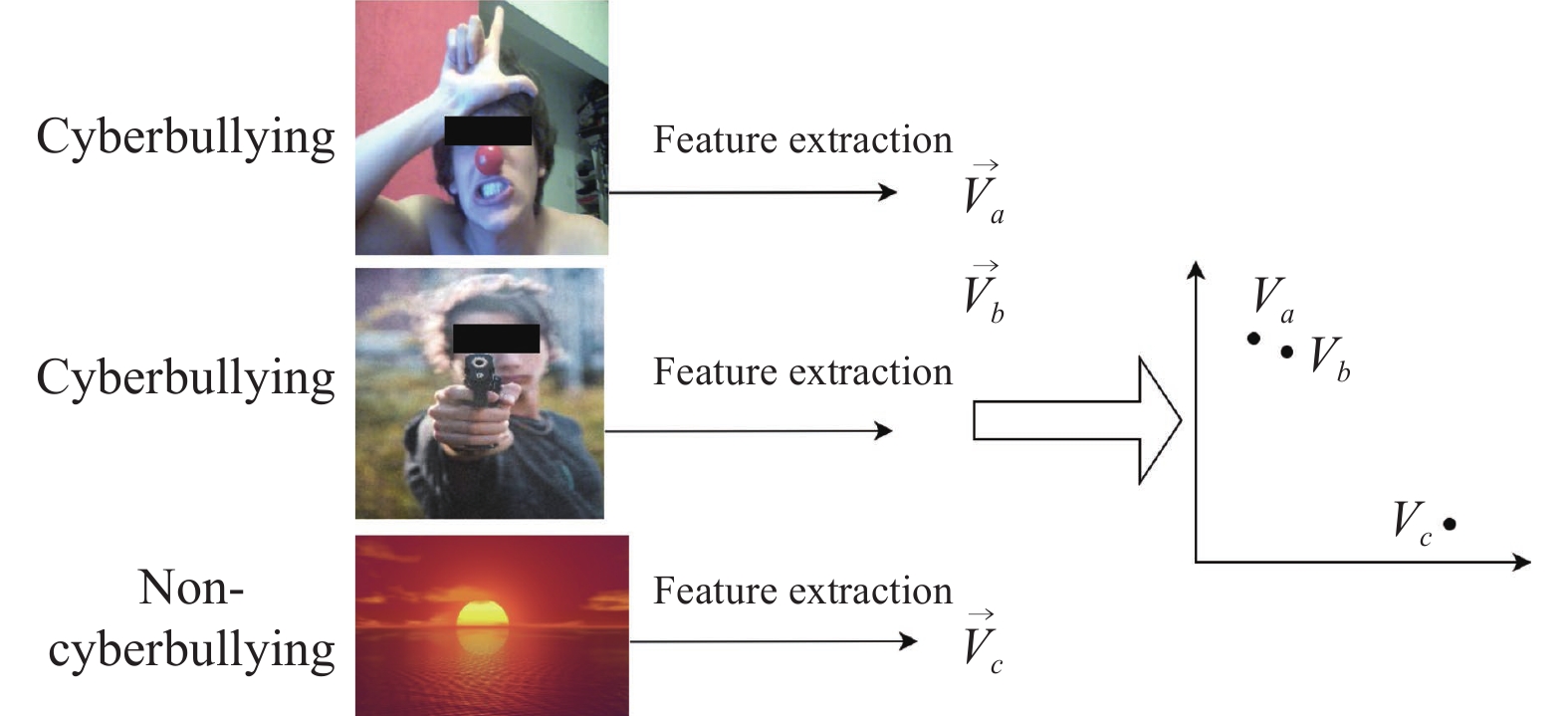
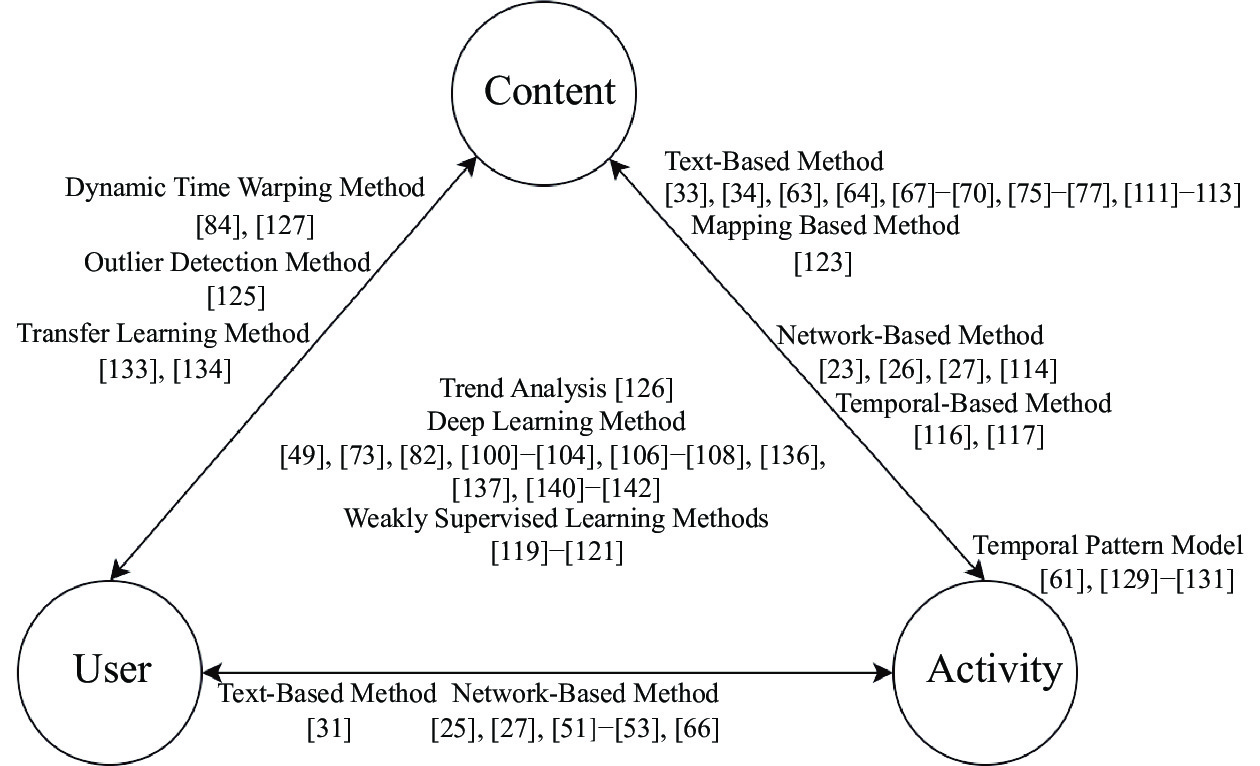
Recent years have witnessed the increasing popularity of mobile and networking devices, as well as social networking sites, where users engage in a variety of activities in the cyberspace on a daily and real-time basis. While such systems provide tremendous convenience and enjoyment for users, malicious usages, such as bullying, cruelty, extremism, and toxicity behaviors, also grow noticeably, and impose significant threats to individuals and communities. In this paper, we review computational approaches for cyberbullying and cyberviolence detection, in order to understand two major factors: 1) What are the defining features of online bullying users, and 2) How to detect cyberbullying and cyberviolence. To achieve the goal, we propose a user-activities-content (UAC) triangular view, which defines that users in the cyberspace are centered around the UAC triangle to carry out activities and generate content. Accordingly, we categorize cyberbully features into three main categories: 1) User centered features, 2) Content centered features, and 3) Activity centered features. After that, we review methods for cyberbully detection, by taking supervised, unsupervised, transfer learning, and deep learning, etc., into consideration. The UAC centered view provides a coherent and complete summary about features and characteristics of online users (their activities), approaches to detect bullying users (and malicious content), and helps defend cyberspace from bullying and toxicity.
S. W. Wang, X. Q. Zhu, W. P. Ding, and A. A. Yengejeh, “Cyberbullying and cyberviolence detection: A triangular user-activity-content view,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 8, pp. 1384–1405, Aug. 2022. doi: 10.1109/JAS.2022.105740.










 E-mail Alert
E-mail Alert


