2022, 9(10): 1861-1878.
doi: 10.1109/JAS.2022.105500
Abstract:
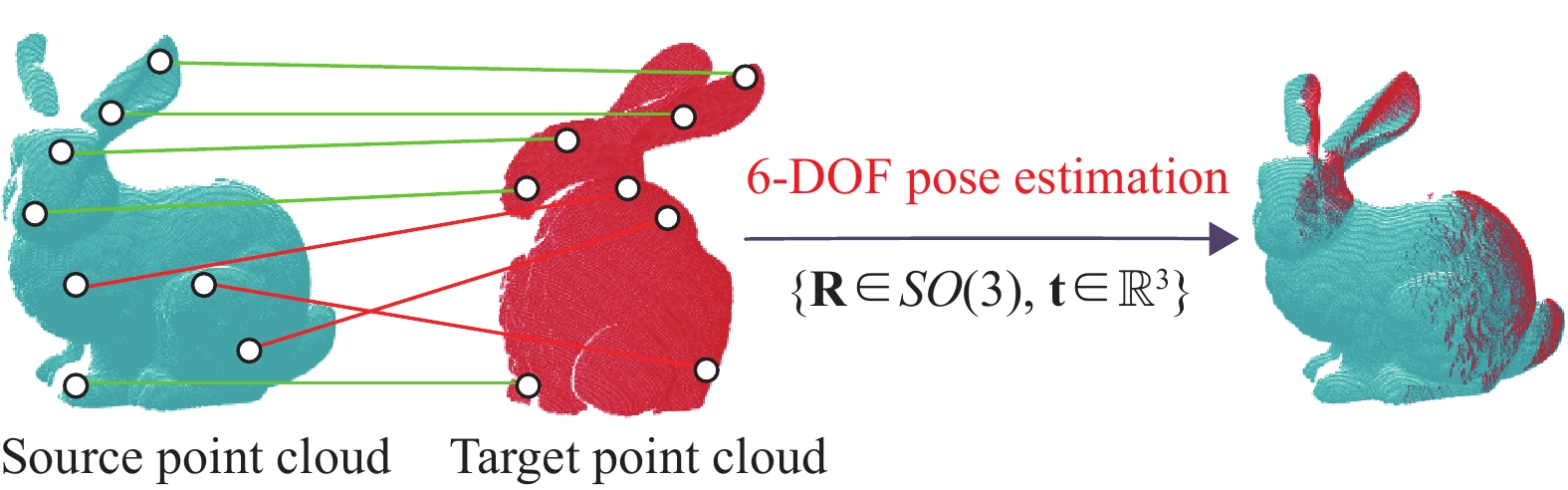
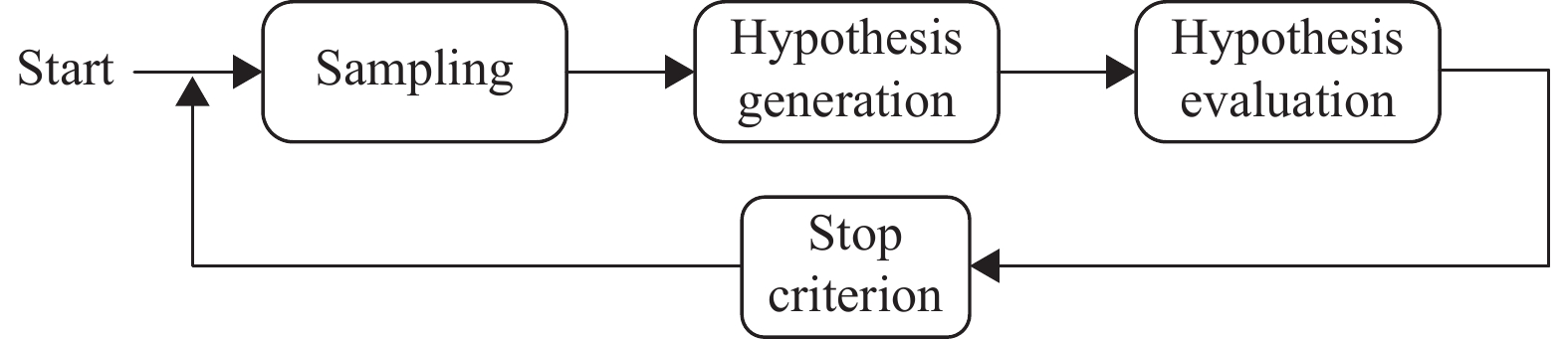
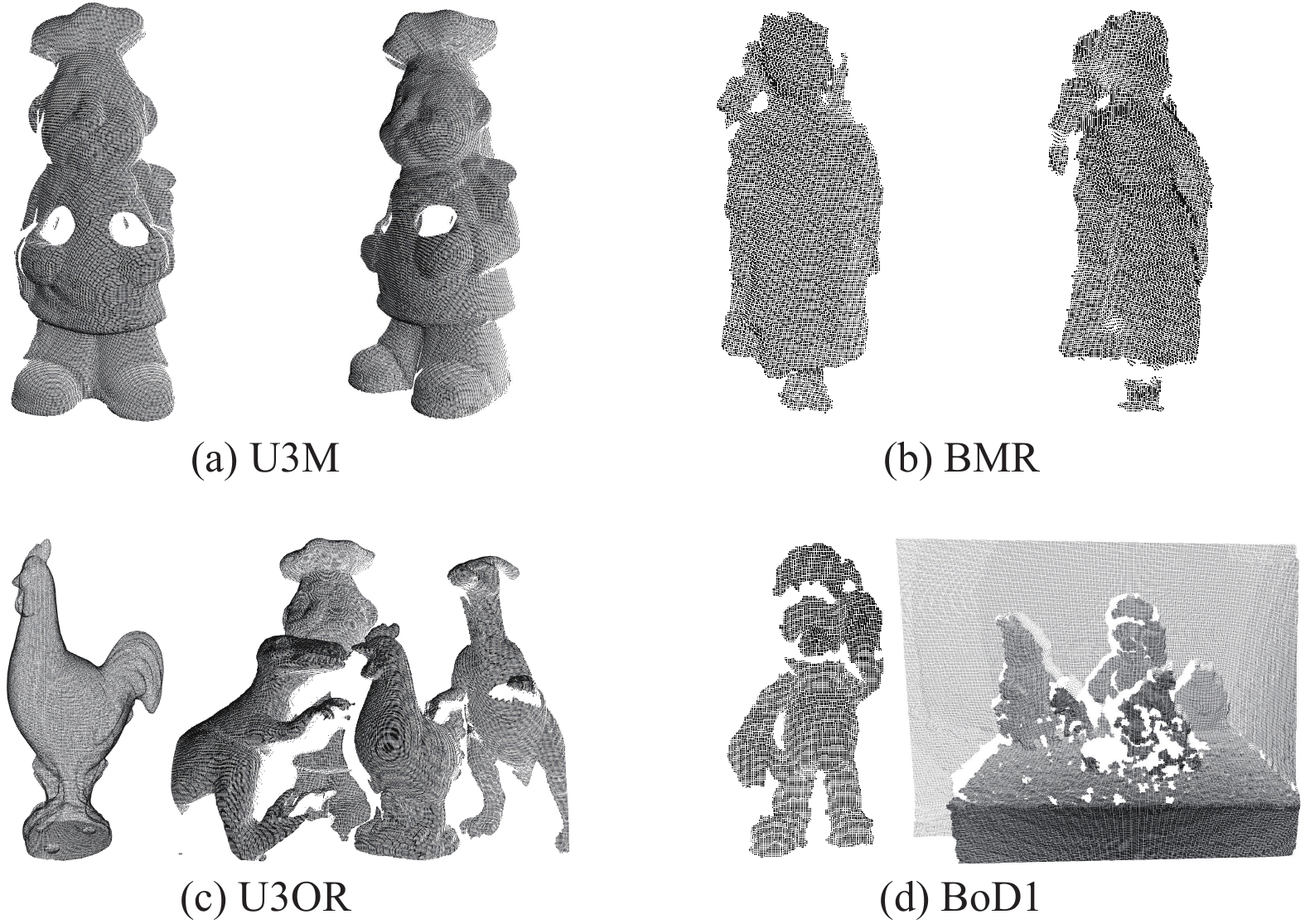
Estimating an accurate six-degree-of-freedom (6-DoF) pose from correspondences with outliers remains a critical issue to 3D rigid registration. Random sample consensus (RANSAC) and its variants are popular solutions to this problem. Although there have been a number of RANSAC-fashion estimators, two issues remain unsolved. First, it is unclear which estimator is more appropriate to a particular application. Second, the impacts of different sampling strategies, hypothesis generation methods, hypothesis evaluation metrics, and stop criteria on the overall estimators remain ambiguous. This work fills these gaps by first considering six existing RANSAC-fashion methods and then proposing eight variants for a comprehensive evaluation. The objective is to thoroughly compare estimators in the RANSAC family, and evaluate the effects of each key stage on the eventual 6-DoF pose estimation performance. Experiments have been carried out on four standard datasets with different application scenarios, data modalities, and nuisances. They provide us with input correspondence sets with a variety of inlier ratios, spatial distributions, and scales. Based on the experimental results, we summarize remarkable outcomes and valuable findings, so as to give practical instructions to real-world applications, and highlight current bottlenecks and potential solutions in this research realm.
J. Q. Yang, Z. Q. Huang, S. W. Quan, Z. G. Cao, and Y. N. Zhang, “RANSACs for 3D rigid registration: A comparative evaluation,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 10, pp. 1861–1878, Oct. 2022. doi: 10.1109/JAS.2022.105500.











 E-mail Alert
E-mail Alert