2018, 5(6): 1062-1073.
doi: 10.1109/JAS.2018.7511225
Abstract:
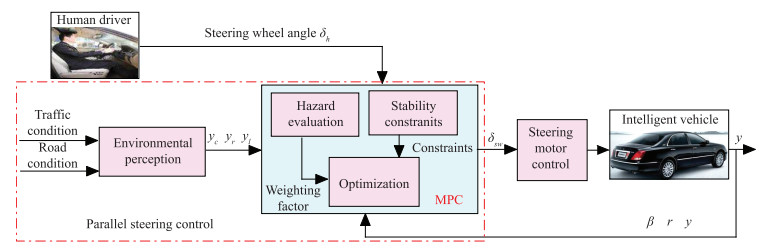
Prompted by emerging developments in connected and automated vehicles, parallel steering control, one aspect of parallel driving, has become highly important for intelligent vehicles for easing the burden and ensuring the safety of human drivers. This paper presents a parallel steering control framework for an intelligent vehicle using moving horizon optimization. The framework considers lateral stability, collision avoidance and actuator saturation and describes them as constraints, which can blend the operation of a human driver and a parallel steering controller effectively. Moreover, the road hazard and the steering operation error are employed to evaluate the operational hazardous of an intelligent vehicle. Under the hazard evaluation, the intelligent vehicle will be mainly operated by the human driver when the vehicle operates in a safe and stable manner. The automated steering driving objective will play an active role and regulate the steering operations of the intelligent vehicle based on the hazard evaluation. To verify the effectiveness of the proposed hazard-evaluation-oriented moving horizon parallel steering control approach, various validations are conducted, and the results are compared with a parallel steering scheme that does not consider automated driving situations. The results illustrate that the proposed parallel steering controller achieves acceptable performance under both conventional conditions and hazardous conditions.
Hongyan Guo, Linhuan Song, Jun Liu, Fei-Yue Wang, Dongpu Cao, Hong Chen, Chen Lv and Partick Chi-Kwong Luk, "Hazard-evaluation-oriented Moving Horizon Parallel Steering Control for Driver-Automation Collaboration During Automated Driving," IEEE/CAA J. Autom. Sinica, vol. 5, no. 6, pp. 1062-1073, Nov. 2018. doi: 10.1109/JAS.2018.7511225.









 E-mail Alert
E-mail Alert