A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 5
Volume 10
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | H. R. Ren, H. Ma, H. Y. Li, and Z. Y. Wang, “Adaptive fixed-time control of nonlinear MASs with actuator faults,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1252–1262, May 2023. doi: 10.1109/JAS.2023.123558

|
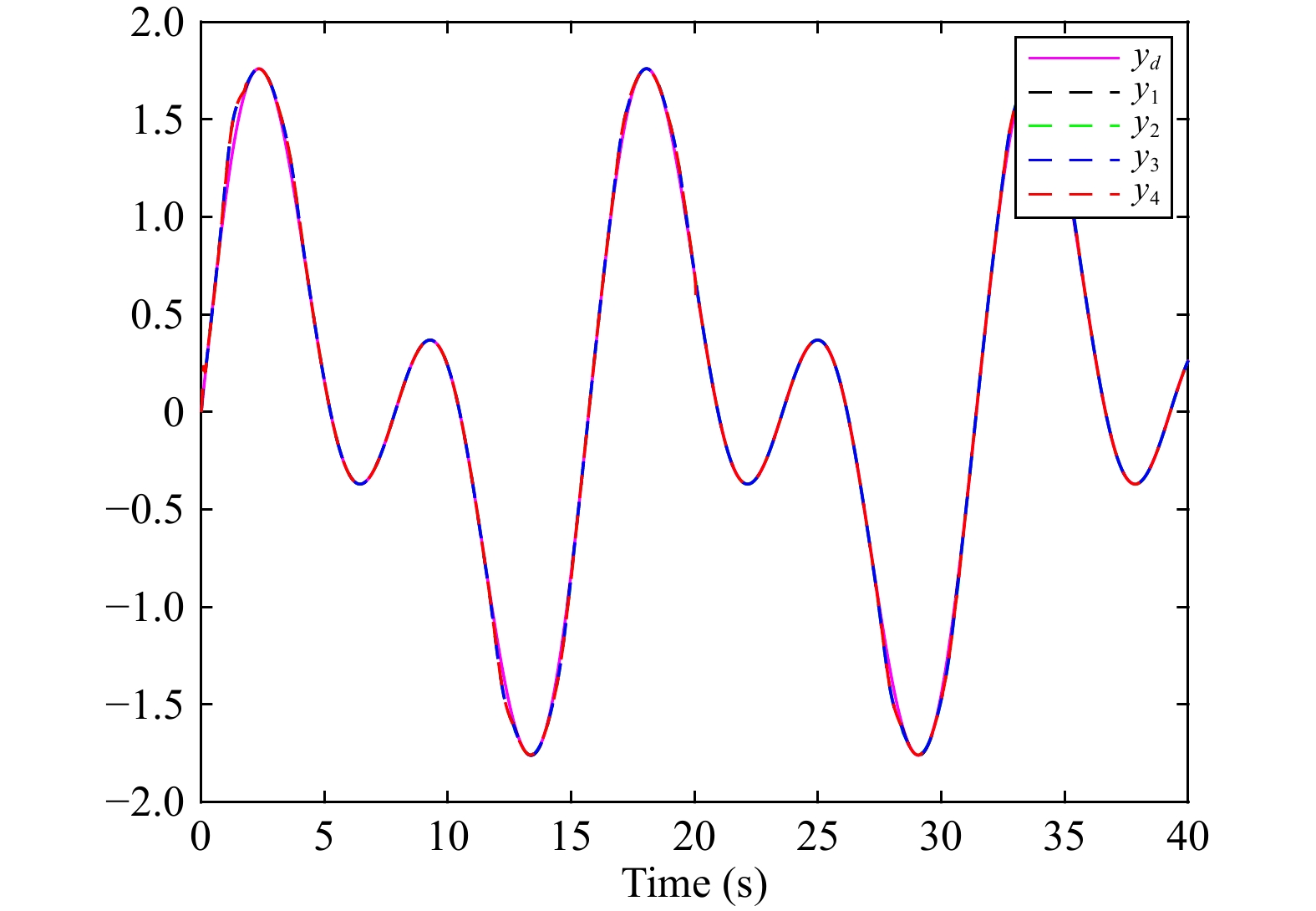
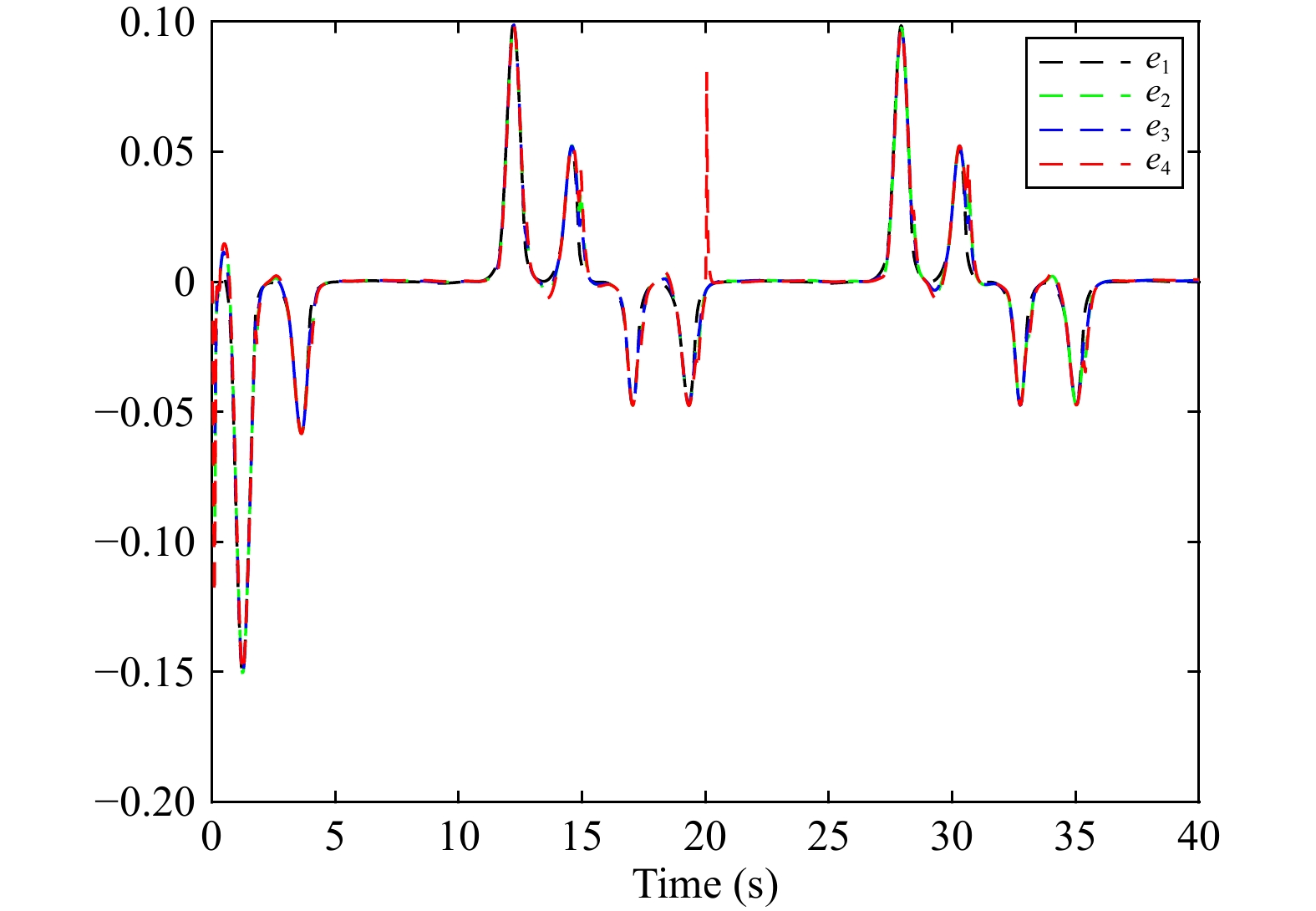
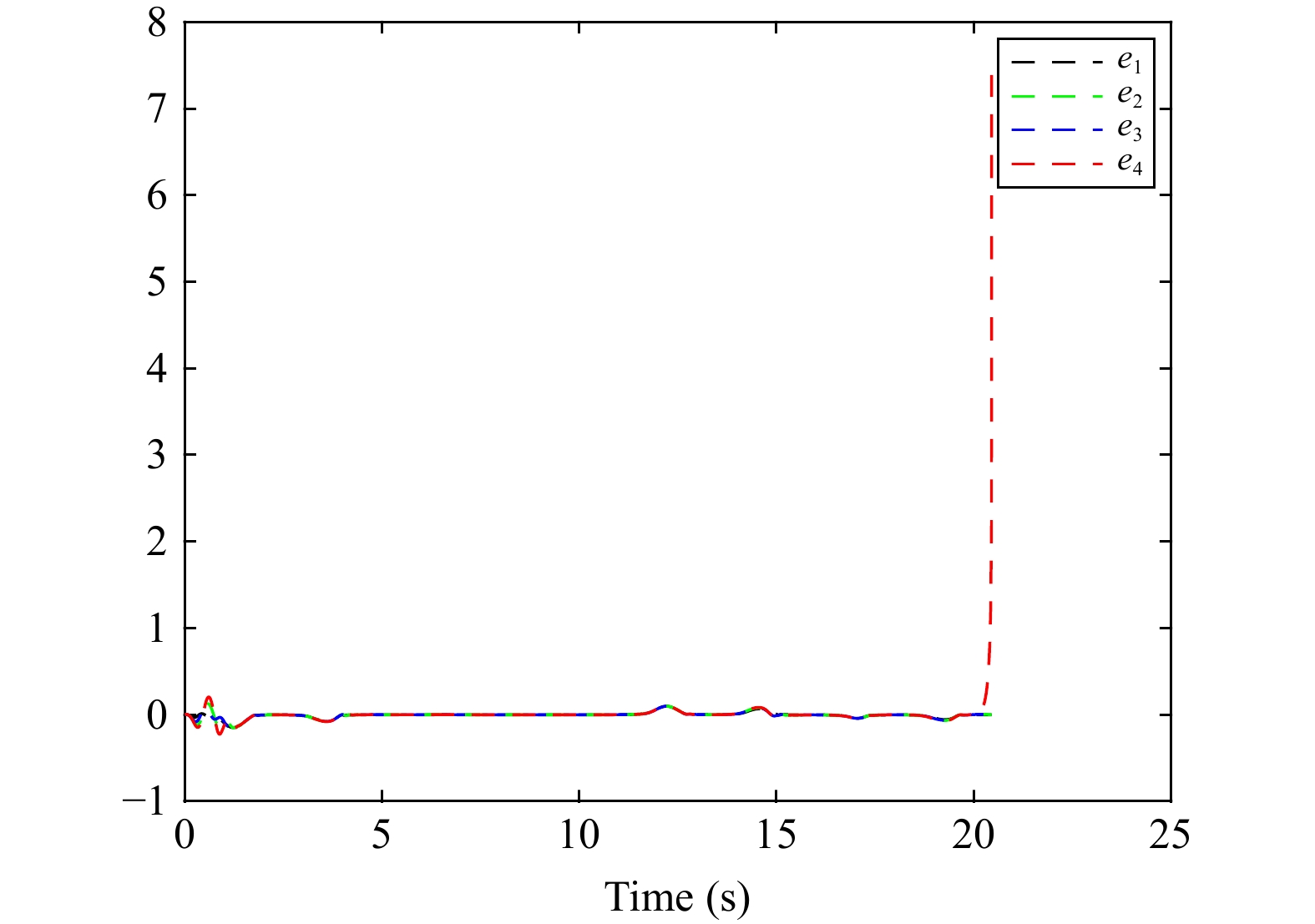
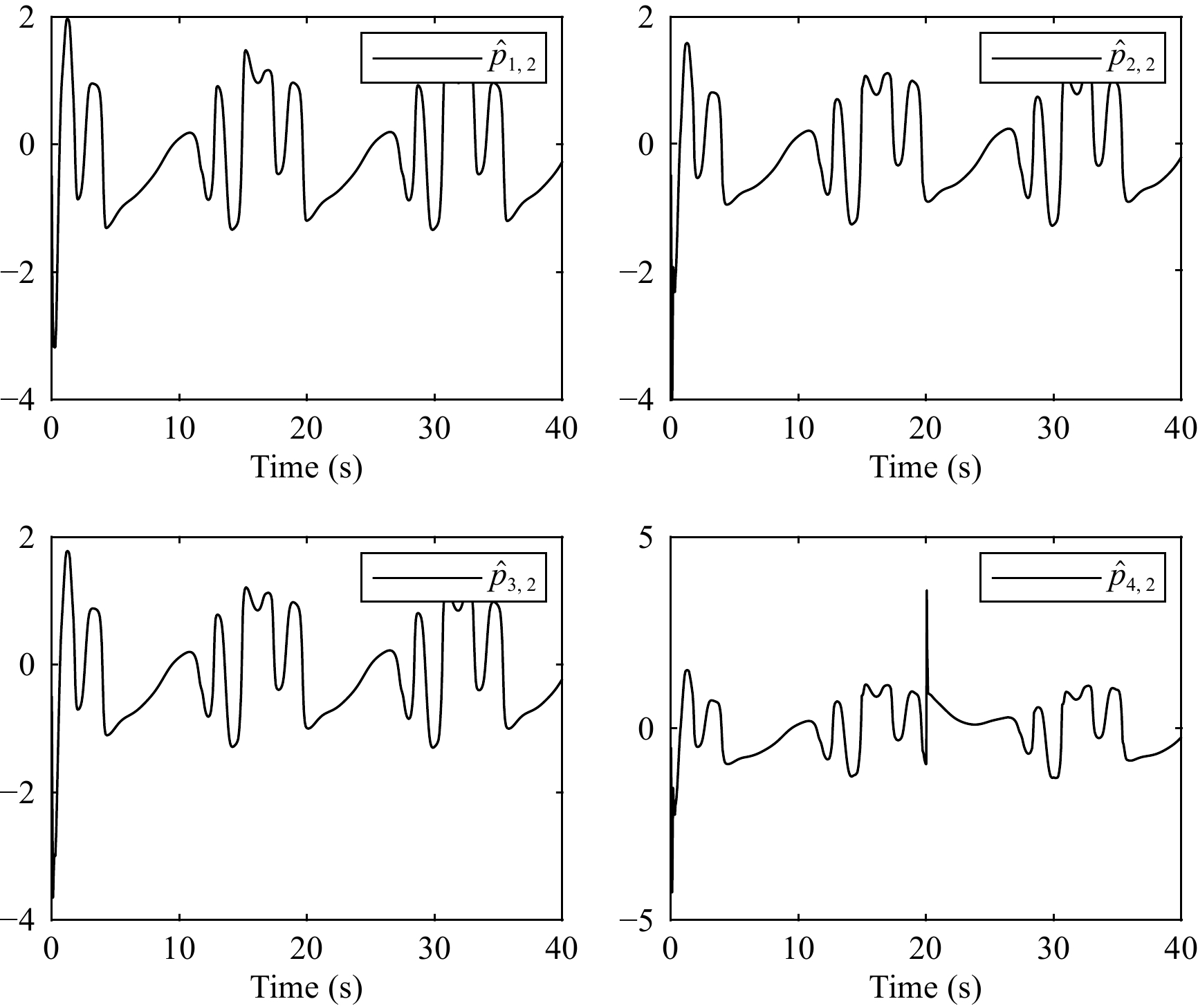
The adaptive fixed-time consensus problem for a class of nonlinear multi-agent systems (MASs) with actuator faults is considered in this paper. To approximate the unknown nonlinear functions in MASs, radial basis function neural networks are used. In addition, the first order sliding mode differentiator is utilized to solve the “explosion of complexity” problem, and a filter error compensation method is proposed to ensure the convergence of filter error in fixed time. With the help of the Nussbaum function, the actuator failure compensation mechanism is constructed. By designing the adaptive fixed-time controller, all signals in MASs are bounded, and the consensus errors between the leader and all followers converge to a small area of origin. Finally, the effectiveness of the proposed control method is verified by simulation examples.

| [1] |
Z. Li, L. Gao, W. Chen, and Y. Xu, “Distributed adaptive cooperative tracking of uncertain nonlinear fractional-order multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 292–300, 2020. doi: 10.1109/JAS.2019.1911858
|
| [2] |
C. Deng, W. Gao, and W. Che, “Distributed adaptive fault-tolerant output regulation of heterogeneous multi-agent systems with coupling uncertainties and actuator faults,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1098–1106, 2020. doi: 10.1109/JAS.2020.1003258
|
| [3] |
Q. Wei, X. Wang, X. Zhong, and N. Wu, “Consensus control of leader-following multi-agent systems in directed topology with heterogeneous disturbances,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 423–431, 2021. doi: 10.1109/JAS.2021.1003838
|
| [4] |
Z. Liu, W. Lin, X. Yu, J. J. Rodríguez-Andina, and H. Gao, “Approximation-free robust synchronization control for dual-linear-motors-driven systems with uncertainties and disturbances,” IEEE Trans. Industrial Electronics, vol. 69, no. 10, pp. 10500–10509, 2022. doi: 10.1109/TIE.2021.3137619
|
| [5] |
J.-X. Zhang and T. Chai, “Singularity-free continuous adaptive control of uncertain underactuated surface vessels with prescribed performance,” IEEE Trans. Syst.,Man,and Cyber.: Syst., vol. 52, no. 9, pp. 5646–5655, 2022. doi: 10.1109/TSMC.2021.3129798
|
| [6] |
G. Lin, H. Li, C. K. Ahn, and D. Yao, “Event-based finite-time neural control for human-in-the-loop UAV attitude systems,” IEEE Trans. Neural Networks and Learning Systems, 2022. DOI: 10.1109/TNNLS.2022.3166531
|
| [7] |
H. Ren, Y. Wang, M. Liu, and H. Li, “An optimal estimation framework of multi-agent systems with random transport protocol,” IEEE Trans. Signal Processing, vol. 70, pp. 2548–2559, 2022. doi: 10.1109/TSP.2022.3175020
|
| [8] |
T. Liu, Z. Qin, Y. Hong, and Z.-P. Jiang, “Distributed optimization of nonlinear multiagent systems: A small-gain approach,” IEEE Trans. Automatic Control, vol. 67, no. 2, pp. 676–691, 2022. doi: 10.1109/TAC.2021.3053549
|
| [9] |
Zhang, T. Liu, and Z.-P. Jiang, “Tracking control of unicycle mobile robots with event-triggered and self-triggered feedback,” IEEE Trans. Automatic Control, 2022. DOI: 10.1109/TAC.2022.3173932
|
| [10] |
H. Li, Y. Wu, M. Chen, and R. Lu, “Adaptive multigradient recursive reinforcement learning event-triggered tracking control for multiagent systems,” IEEE Trans. Neural Networks and Learning Systems, vol. 34, no. 1, pp. 144–156, 2023. doi: 10.1109/TNNLS.2021.3090570
|
| [11] |
Z. Jin, X. Sun, Z. Qin, and C. K. Ahn, “Fuzzy small-gain approach for the distributed optimization of T-S fuzzy cyber-physical systems,” IEEE Trans. Cybernetics, 2022. DOI: 10.1109/TCYB.2022.3202576
|
| [12] |
Z. Jin, C. K. Ahn, and J. Li, “Momentum-based distributed continuous-time nonconvex optimization of nonlinear multi-agent systems via timescale separation,” IEEE Trans. Network Science and Engineering, vol. 10, no. 2, pp. 980–989, 2023. doi: 10.1109/TNSE.2022.3225409
|
| [13] |
Z. Jin, Z. Qin, X. Zhang, and C. Guan, “A leader-following consensus problem via a distributed observer and fuzzy input-to-output small-gain theorem,” IEEE Trans. Control Network Syst., vol. 9, no. 1, pp. 62–74, 2022. doi: 10.1109/TCNS.2022.3141690
|
| [14] |
J. Ni, S hi, Y. Zhao, and Z. Wu, “Fixed-time output consensus tracking for high-order multi-agent systems with directed network topology and packet dropout,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 4, pp. 817–836, 2021. doi: 10.1109/JAS.2021.1003916
|
| [15] |
X. Zheng, H. Li, C. K. Ahn, and D. Yao, “NN-based fixed-time attitude tracking control for multiple unmanned aerial vehicles with nonlinear faults,” IEEE Trans. Aerospace Electronic Systems, 2022. DOI: 10.1109/TAES.2022.3205566
|
| [16] |
Y. Pan, Q. Li, H. Liang, and H.-K. Lam, “A novel mixed control approach for fuzzy systems via membership functions online learning policy,” IEEE Trans. Fuzzy Systems, vol. 30, no. 9, pp. 3812–3822, 2022. doi: 10.1109/TFUZZ.2021.3130201
|
| [17] |
H. Ma, H. Ren, Q. Zhou, H. Li, and Z. Wang, “Observer-based neural control of N-link flexible-joint robots,” IEEE Trans. Neural Networks Learning Syst., 2022. DOI: 10.1109/TNNLS.2022.3203074
|
| [18] |
L. Cao, D. Yao, H. Li, W. Meng, and R. Lu, “Fuzzy-based dynamic event triggering formation control for nonstrict-feedback nonlinear MASs,” Fuzzy Sets and Systems, vol. 452, pp. 1–22, 2023. doi: 10.1016/j.fss.2022.03.005
|
| [19] |
Y. Pan, Y. Wu, and H.-K. Lam, “Security-based fuzzy control for nonlinear networked control systems with DoS attacks via a resilient event-triggered scheme,” IEEE Trans. Fuzzy Systems, vol. 30, no. 10, pp. 4359–4368, 2022. doi: 10.1109/TFUZZ.2022.3148875
|
| [20] |
H. Ren, H. Ma, H. Li, and R. Lu, “A disturbance observer based intelligent control for nonstrict-feedback nonlinear systems,” SCIENCE CHINA—Technological Sciences, vol. 66, no. 2, pp. 456–467, 2023. doi: 10.1007/s11431-022-2126-7
|
| [21] |
H. Zhou, S. Sui, and S. Tong, “Fuzzy adaptive finite-time consensus control for high-order nonlinear multi-agent systems based on event-triggered,” IEEE Trans. Fuzzy Systems, vol. 30, no. 11, pp. 4891–4904, 2022. doi: 10.1109/TFUZZ.2022.3163907
|
| [22] |
Z. Liu, X. Dong, J. Xue, H. Li, and Y. Chen, “Adaptive neural control for a class of pure-feedback nonlinear systems via dynamic surface technique,” IEEE Trans. Neural Networks Learning Syst., vol. 27, no. 9, pp. 1969–1975, 2016. doi: 10.1109/TNNLS.2015.2462127
|
| [23] |
M. Chen and S. S. Ge, “Adaptive neural output feedback control of uncertain nonlinear systems with unknown hysteresis using disturbance observer,” IEEE Trans. Industrial Electronics, vol. 62, no. 12, pp. 7706–7716, 2015. doi: 10.1109/TIE.2015.2455053
|
| [24] |
L. Wang and C. L. Chen, “Adaptive fuzzy dynamic surface control of nonlinear constrained systems with unknown virtual control coefficients,” IEEE Trans. Fuzzy Systems, vol. 28, no. 8, pp. 1737–1747, 2020. doi: 10.1109/TFUZZ.2019.2921277
|
| [25] |
S.-L. Dai, K. Lu, and J. Fu, “Adaptive finite-time tracking control of nonholonomic multirobot formation systems with limited field-of-view sensors,” IEEE Trans. Cybernetics, vol. 52, no. 10, pp. 10695–10708, 2022. doi: 10.1109/TCYB.2021.3063481
|
| [26] |
K. Li, S. Tong, and Y. Li, “Finite-time adaptive fuzzy decentralized control for nonstrict-feedback nonlinear systems with output-constraint,” IEEE Trans. Syst.,Man,Cybernetics: Syst., vol. 50, no. 12, pp. 5271–5284, 2020. doi: 10.1109/TSMC.2018.2870698
|
| [27] |
F. Wang, B. Chen, Y. Sun, Y. Gao, and C. Lin, “Finite-time fuzzy control of stochastic nonlinear systems,” IEEE Trans. Cybernetics, vol. 50, no. 6, pp. 2617–2626, 2020. doi: 10.1109/TCYB.2019.2925573
|
| [28] |
S.-L. Dai, S. He, X. Chen, and X. Jin, “Adaptive leader-follower formation control of nonholonomic mobile robots with prescribed transient and steady-state performance,” IEEE Trans. Industrial Informatics, vol. 16, no. 6, pp. 3662–3671, 2020. doi: 10.1109/TII.2019.2939263
|
| [29] |
Y. Liu, H. Li, Z. Zuo, X. Li, and R. Lu, “An overview of finite/fixed-time control and its application in engineering systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 12, pp. 2106–2120, 2022. doi: 10.1109/JAS.2022.105413
|
| [30] |
Y. Li, F. Qu, and S. Tong, “Observer-based fuzzy adaptive finite-time containment control of nonlinear multiagent systems with input delay,” IEEE Trans. Cybernetics, vol. 51, no. 1, pp. 126–137, 2021. doi: 10.1109/TCYB.2020.2970454
|
| [31] |
L. Wang, H. Wang, X. Liu, S. Ling, and S. Liu, “Fuzzy finite-time command filtering output feedback control of nonlinear systems,” IEEE Trans. Fuzzy Systems, vol. 30, no. 1, pp. 97–107, 2022. doi: 10.1109/TFUZZ.2020.3032784
|
| [32] |
A. Polyakov, D. Efimov, and W. Perruquetti, “Finite-time and fixed-time stabilization: Implicit Lyapunov function approach,” Automatica, vol. 51, pp. 332–340, 2015. doi: 10.1016/j.automatica.2014.10.082
|
| [33] |
J. Liu, Y. Zhang, Y. Yu, and C. Sun, “Fixed-time event-triggered consensus for nonlinear multiagent systems without continuous communications,” IEEE Trans. Syst.,Man,Cybernetics: Syst., vol. 49, no. 11, pp. 2221–2229, 2019. doi: 10.1109/TSMC.2018.2876334
|
| [34] |
L. Zhang, B. Chen, C. Lin, and Y. Shang, “Fuzzy adaptive fixed-time consensus tracking control of high-order multi-agent systems,” IEEE Trans. Fuzzy Systems, vol. 30, no. 2, pp. 567–578, 2022. doi: 10.1109/TFUZZ.2020.3042239
|
| [35] |
Z. Liu, F. Wang, Y. Zhang, X. Chen, and C. L. Chen, “Adaptive tracking control for a class of nonlinear systems with a fuzzy dead-zone input,” IEEE Trans. Fuzzy Systems, vol. 23, no. 1, pp. 193–204, 2015. doi: 10.1109/TFUZZ.2014.2310491
|
| [36] |
Y.-J. Liu, J. Li, S. Tong, and C. L. Chen, “Neural network control-based adaptive learning design for nonlinear systems with full-state constraints,” IEEE Trans. Neural Networks Learning Syst., vol. 27, no. 7, pp. 1562–1571, 2016. doi: 10.1109/TNNLS.2015.2508926
|
| [37] |
B. Chen, H. Zhang, X. Liu, and C. Lin, “Neural observer and adaptive neural control design for a class of nonlinear systems,” IEEE Trans. Neural Networks Learning Syst., vol. 29, no. 9, pp. 4261–4271, 2018. doi: 10.1109/TNNLS.2017.2760903
|
| [38] |
J. Xia, J. Zhang, J. Feng, Z. Wang, and G. Zhuang, “Command filter-based adaptive fuzzy control for nonlinear systems with unknown control directions,” IEEE Trans. Syst.,Man,Cybernetics: Syst., vol. 51, no. 3, pp. 1945–1953, 2021.
|
| [39] |
Y. Li and S. Tong, “Adaptive neural networks decentralized FTC design for nonstrict-feedback nonlinear interconnected large-scale systems against actuator faults,” IEEE Trans. Neural Networks Learning Systems, vol. 28, no. 11, pp. 2541–2554, 2017. doi: 10.1109/TNNLS.2016.2598580
|
| [40] |
Y. Wang, Y. Song, M. Krstic, and C. Wen, “Adaptive finite time coordinated consensus for high-order multi-agent systems: Adjustable fraction power feedback approach,” Information Sciences, vol. 372, pp. 392–406, 2016. doi: 10.1016/j.ins.2016.08.054
|
| [41] |
J.-X. Zhang, Q.-G. Wang, and W. Ding, “Global output-feedback prescribed performance control of nonlinear systems with unknown virtual control coefficients,” IEEE Trans. Automatic Control, vol. 67, no. 12, pp. 6904–6911, 2022. doi: 10.1109/TAC.2021.3137103
|
| [42] |
X. Lin, Y. Yu, and C. Sun, “A decoupling control for quadrotor UAV using dynamic surface control and sliding mode disturbance observer,” Nonlinear Dynamics, vol. 97, no. 1, pp. 781–795, 2019. doi: 10.1007/s11071-019-05013-6
|
| [43] |
H.-B. Zeng, Y. He, and K. L. Teo, “Monotone-delay-interval-based lyapunov functionals for stability analysis of systems with a periodically varying delay,” Automatica, vol. 138, p. 110030, 2022. doi: 10.1016/j.automatica.2021.110030
|
| [44] |
X.-C. Shangguan, C.-K. Zhang, Y. He, L. Jin, L. Jiang, J. W. Spencer, and M. Wu, “Robust load frequency control for power system considering transmission delay and sampling period,” IEEE Trans. Industrial Informatics, vol. 17, no. 8, pp. 5292–5303, 2021. doi: 10.1109/TII.2020.3026336
|
| [45] |
Z. Li, X. Yu, J. Qiu, and H. Gao, “Cell division genetic algorithm for component allocation optimization in multifunctional placers,” IEEE Trans. Industrial Informatics, vol. 18, no. 1, pp. 559–570, 2022. doi: 10.1109/TII.2021.3069459
|
| [46] |
H. Gao, Z. Li, X. Yu, and J. Qiu, “Hierarchical multiobjective heuristic for PCB assembly optimization in a beam-head surface mounter,” IEEE Trans. Cybernetics, vol. 52, no. 7, pp. 6911–6924, 2022. doi: 10.1109/TCYB.2020.3040788
|
| [47] |
Z. Li, K. Zhao, L. Zhang, X. Wu, T. Zhang, Q. Li, X. Li, and C.-Y. Su, “Human-in-the-loop control of a wearable lower limb exoskeleton for stable dynamic walking,” IEEE/ASME Trans. Mechatronics, vol. 26, no. 5, pp. 2700–2711, 2021. doi: 10.1109/TMECH.2020.3044289
|
| [48] |
Z. Li, C. Deng, and K. Zhao, “Human-cooperative control of a wearable walking exoskeleton for enhancing climbing stair activities,” IEEE Trans. Industrial Electronics, vol. 67, no. 4, pp. 3086–3095, 2020. doi: 10.1109/TIE.2019.2914573
|
| [49] |
Z. Li, Z. Ren, K. Zhao, C. Deng, and Y. Feng, “Human-cooperative control design of a walking exoskeleton for body weight support,” IEEE Trans. Industrial Informatics, vol. 16, no. 5, pp. 2985–2996, 2020. doi: 10.1109/TII.2019.2900121
|
Figures(9) / Tables(2)






 DownLoad:
DownLoad: