A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 5
Volume 10
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | A. D. Carnerero, D. R. Ramirez, D. Limon, and T. Alamo, “Kernel-based state-space kriging for predictive control,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1263–1275, May 2023. doi: 10.1109/JAS.2023.123459

|
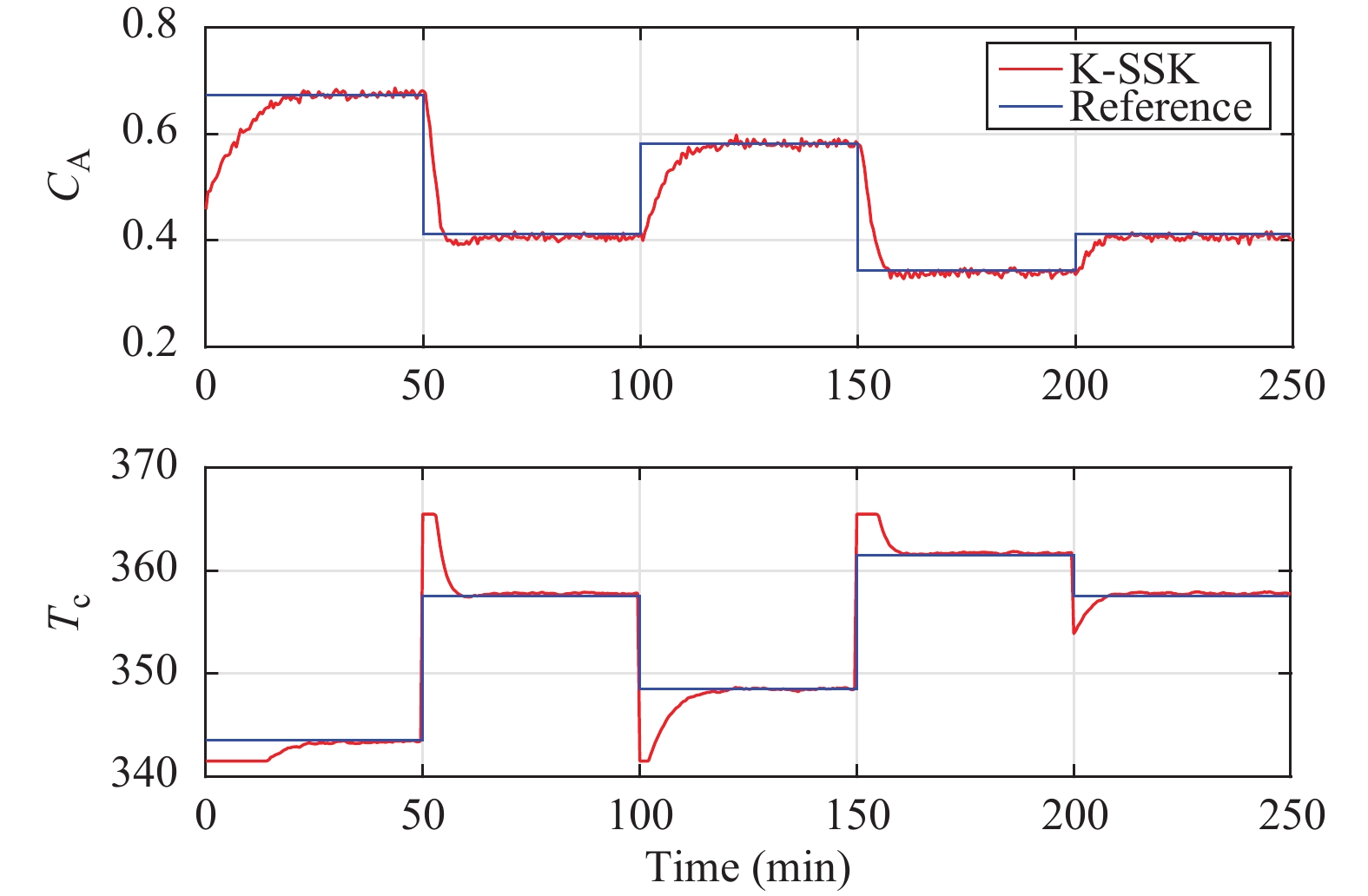
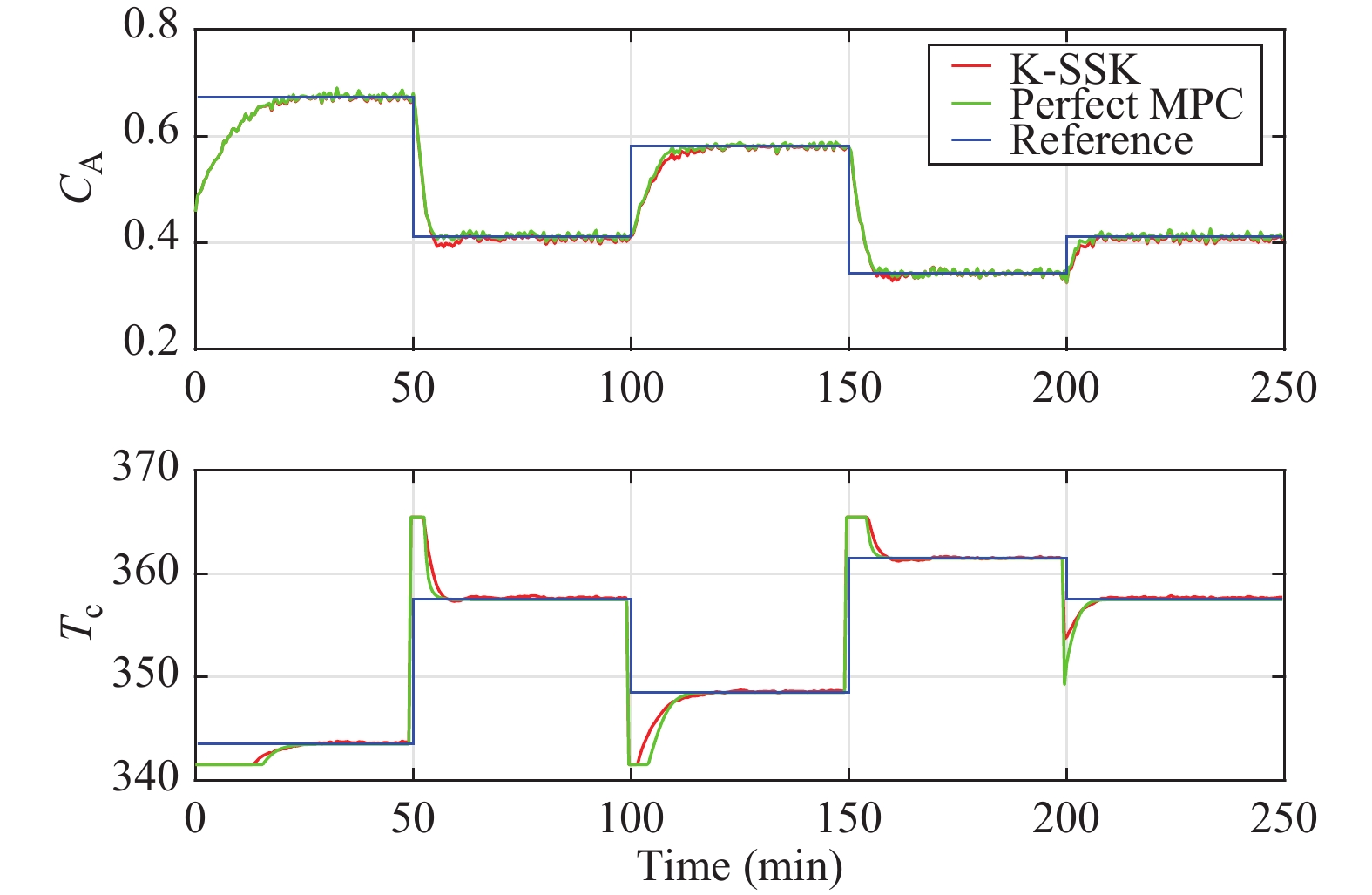
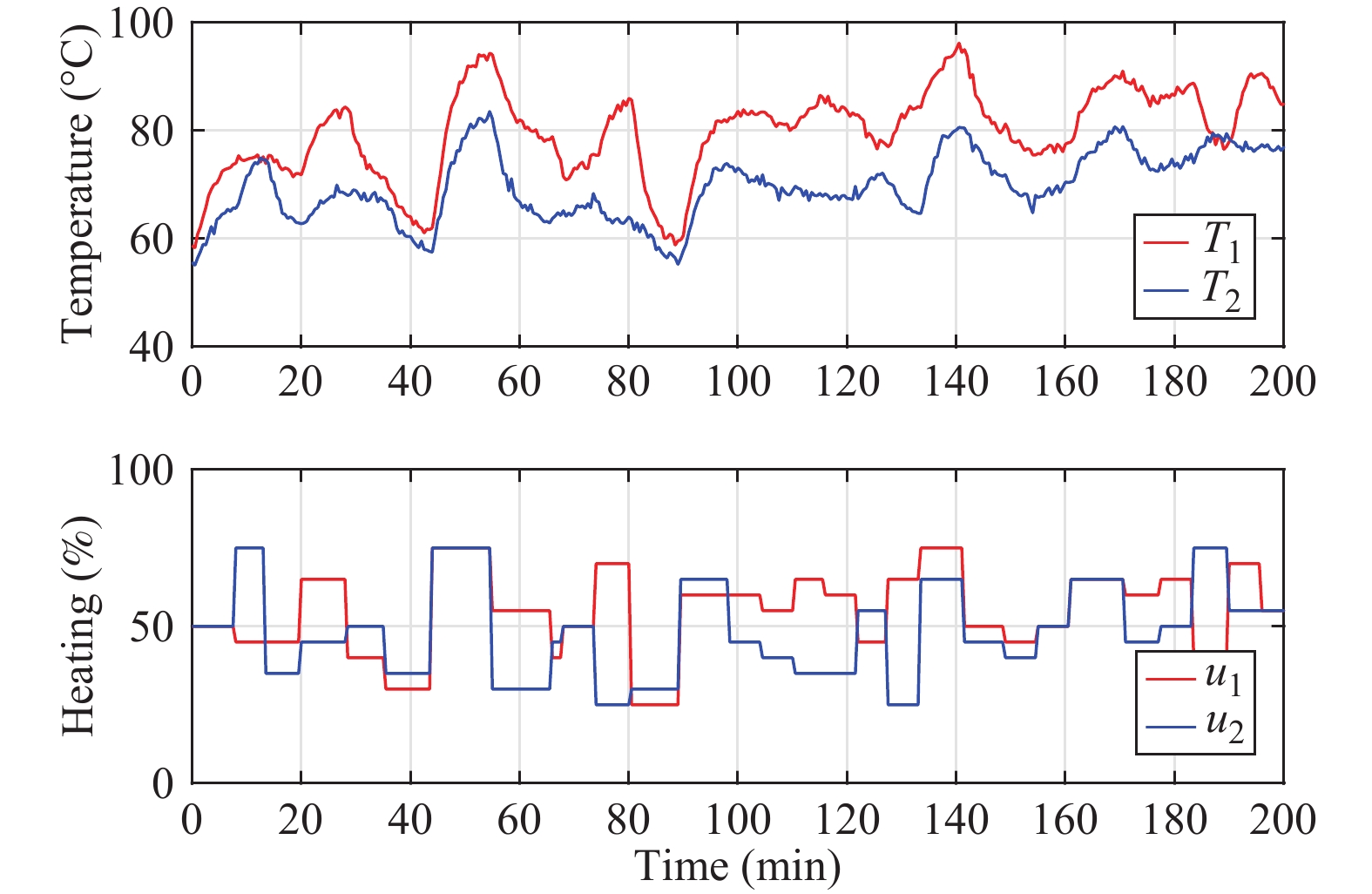
In this paper, we extend the state-space kriging (SSK) modeling technique presented in a previous work by the authors in order to consider non-autonomous systems. SSK is a data-driven method that computes predictions as linear combinations of past outputs. To model the nonlinear dynamics of the system, we propose the kernel-based state-space kriging (K-SSK), a new version of the SSK where kernel functions are used instead of resorting to considerations about the locality of the data. Also, a Kalman filter can be used to improve the predictions at each time step in the case of noisy measurements. A constrained tracking nonlinear model predictive control (NMPC) scheme using the black-box input-output model obtained by means of the K-SSK prediction method is proposed. Finally, a simulation example and a real experiment are provided in order to assess the performance of the proposed controller.

| [1] |
L. Ljung, System Identification (2nd Ed.): Theory for the User. Prentice Hall PTR, Upper Saddle River, NJ, USA, 1999.
|
| [2] |
B. Lim and S. Zohren, “Time-series forecasting with deep learning: A survey,” Philosophical Transactions of the Royal Society A, vol. 379, no. 2194, p. 20200209, 2021. doi: 10.1098/rsta.2020.0209
|
| [3] |
S. H. Rudy, J. N. Kutz, and S. L. Brunton, “Deep learning of dynamics and signal-noise decomposition with time-stepping constraints,” Journal of Computational Physics, vol. 396, pp. 483–506, 2019. doi: 10.1016/j.jcp.2019.06.056
|
| [4] |
C. E. Rasmussen and C. K. I. Williams, Gaussian Processes for Machine Learning. MIT Press, 2006.
|
| [5] |
D. F. Gomez, F. D. Lagor, P. B. Kirk, A. H. Lind, A. R. Jones, and D. A. Paley, “Data-driven estimation of the unsteady flowfield near an actuated airfoil,” Journal of Guidance,Control,and Dynamics, vol. 42, no. 10, pp. 2279–2287, 2019. doi: 10.2514/1.G004339
|
| [6] |
J. R. Salvador, D. R. Ramirez, T. Alamo, and D. Muñoz de la Peña, “Offset free data driven control: Application to a process control trainer,” IET Control Theory &Applications, vol. 13, no. 18, pp. 3096–3106, 2019.
|
| [7] |
J. Roll, A. Nazin, and L. Ljung, “Nonlinear system identification via direct weight optimization,” Automatica, vol. 41, no. 3, pp. 475–490, 2005. doi: 10.1016/j.automatica.2004.11.010
|
| [8] |
J. M. Manzano, D. Muñoz de la Peña, J. P. Calliess, and D. Limon, “Componentwise hölder inference for robust learning-based MPC,” IEEE Trans. Automatic Control, vol. 66, no. 11, pp. 5577–5583, 2021. doi: 10.1109/TAC.2021.3056356
|
| [9] |
A. D. Carnerero, D. R. Ramirez, and T. Alamo, “State-space kriging: A data-driven method to forecast nonlinear dynamical systems,” IEEE Control Systems Letters, vol. 6, pp. 2258–2263, 2022. doi: 10.1109/LCSYS.2021.3140167
|
| [10] |
N. Cressie, “Kriging nonstationary data,” Journal of the American Statistical Association, vol. 81, no. 395, pp. 625–634, 1986. doi: 10.1080/01621459.1986.10478315
|
| [11] |
J. Marzat and H. Piet-Lahanier, “Design of nonlinear MPC by Kriging-based optimization,” IFAC Proceedings Volumes, vol. 45, no. 16, pp. 1490–1495, 2012. doi: 10.3182/20120711-3-BE-2027.00136
|
| [12] |
E. F. Camacho and C. Bordons, Model Predictive Control. Springer Science & Business Media, 2013.
|
| [13] |
J. Salvador, T. Alamo, D. Ramirez, and D. Muñoz de la Peña, “Model predictive control of partially fading memory systems with binary inputs,” Journal of Process Control, vol. 64, pp. 141–151, 2018. doi: 10.1016/j.jprocont.2018.02.006
|
| [14] |
H. Wei and Y. Shi, “MPC-based motion planning and control enables smarter and safer autonomous marine vehicles: Perspectives and a tutorial survey,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 1, pp. 8–24, 2023.
|
| [15] |
J. Berberich, J. Köhler, M. A. Müller, and F. Allgöwer, “Data-driven model predictive control with stability and robustness guarantees,” IEEE Trans. Automatic Control, vol. 66, no. 4, pp. 1702–1717, 2020.
|
| [16] |
X. Wang, J. Sun, G. Wang, F. Allgöwer, and J. Chen, “Data-driven control of distributed event-triggered network systems,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 351–364, 2023. doi: 10.1109/JAS.2023.123225
|
| [17] |
K. Arulkumaran, M. P. Deisenroth, M. Brundage, and A. A. Bharath, “Deep reinforcement learning: A brief survey,” IEEE Signal Processing Magazine, vol. 34, no. 6, pp. 26–38, 2017. doi: 10.1109/MSP.2017.2743240
|
| [18] |
D. Limon, I. Alvarado, T. Alamo, and E. F. Camacho, “MPC for tracking piecewise constant references for constrained linear systems,” Automatica, vol. 44, no. 9, pp. 2382–2387, 2008. doi: 10.1016/j.automatica.2008.01.023
|
| [19] |
D. Limon, A. Ferramosca, I. Alvarado, and T. Alamo, “Nonlinear MPC for tracking piece-wise constant reference signals,” IEEE Trans. Automatic Control, vol. 63, no. 11, pp. 3735–3750, 2018. doi: 10.1109/TAC.2018.2798803
|
| [20] |
N. Cristianini and J. Shawe-Taylor, An Introduction to Support Vector Machines and Other Kernel-Based Learning Methods. Cambridge University Press, 2000.
|
| [21] |
J. Shawe-Taylor and N. Cristianini, Kernel Methods for Pattern Analysis. Cambridge University Press, 2004.
|
| [22] |
J. P. Kleijnen, “Kriging metamodeling in simulation: A review,” European Journal of Operational Research, vol. 192, no. 3, pp. 707–716, 2009. doi: 10.1016/j.ejor.2007.10.013
|
| [23] |
G. Alfonso, A. D. Carnerero, D. R. Ramirez, and T. Alamo, “Receding horizon optimization of large trade orders,” IEEE Access, vol. 9, pp. 63865–63875, 2021. doi: 10.1109/ACCESS.2021.3075700
|
| [24] |
S. Boyd and L. Vandenberghe, Convex Optimization. Cambridge University Press, 2004.
|
| [25] |
G. Grimm, M. J. Messina, S. E. Tuna, and A. R. Teel, “Examples when nonlinear model predictive control is nonrobust,” Automatica, vol. 40, no. 10, pp. 1729–1738, 2004. doi: 10.1016/j.automatica.2004.04.014
|
| [26] |
H. K. Khalil, Nonlinear Control. Pearson New York, 2015, vol. 406.
|
| [27] |
D. E. Seborg, T. F. Edgar, D. A. Mellichamp, and F. J. Doyle III, Process Dynamics and Control. John Wiley & Sons, 2016.
|
| [28] |
G. Pannocchia and J. B. Rawlings, “Disturbance models for offset-free model-predictive control,” AIChE Journal, vol. 49, no. 2, pp. 426–437, 2003. doi: 10.1002/aic.690490213
|
| [29] |
U. Maeder, F. Borrelli, and M. Morari, “Linear offset-free model predictive control,” Automatica, vol. 45, no. 10, pp. 2214–2222, 2009. doi: 10.1016/j.automatica.2009.06.005
|
| [30] |
G. Pannocchia, “Offset-free tracking MPC: A tutorial review and comparison of different formulations,” in Proc. European Control Conf., 2015, pp. 527–532.
|
| [31] |
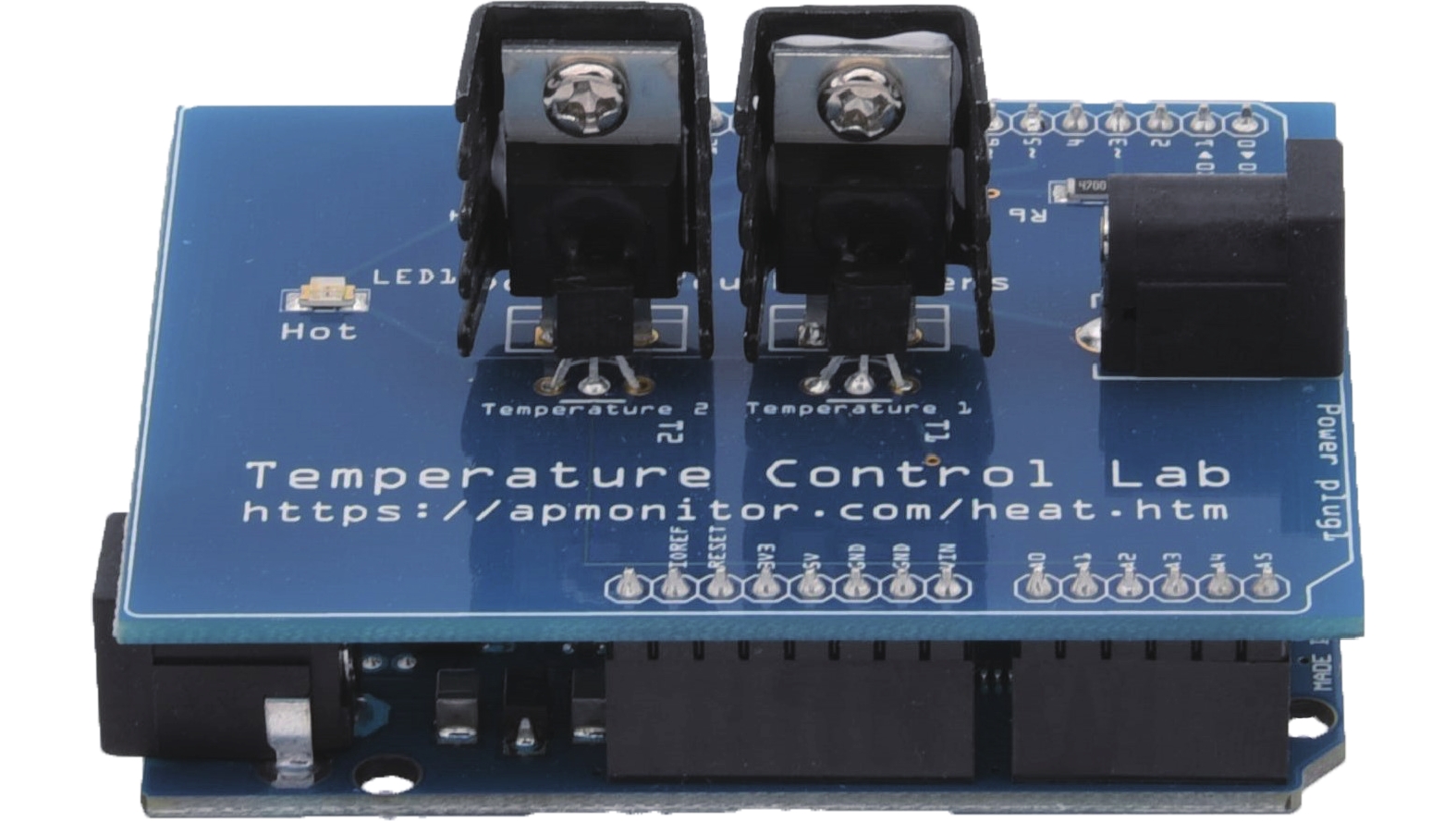
P. M. Oliveira and J. D. Hedengren, “An APMonitor temperature lab PID control experiment for undergraduate students,” in Proc. 24th IEEE Int. Conf. Emerging Technologies and Factory Automation, 2019, pp. 790–797.
|

Figures(6) / Tables(3)






 DownLoad:
DownLoad: