A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 5
Volume 10
Issue 5
IEEE/CAA Journal of Automatica Sinica
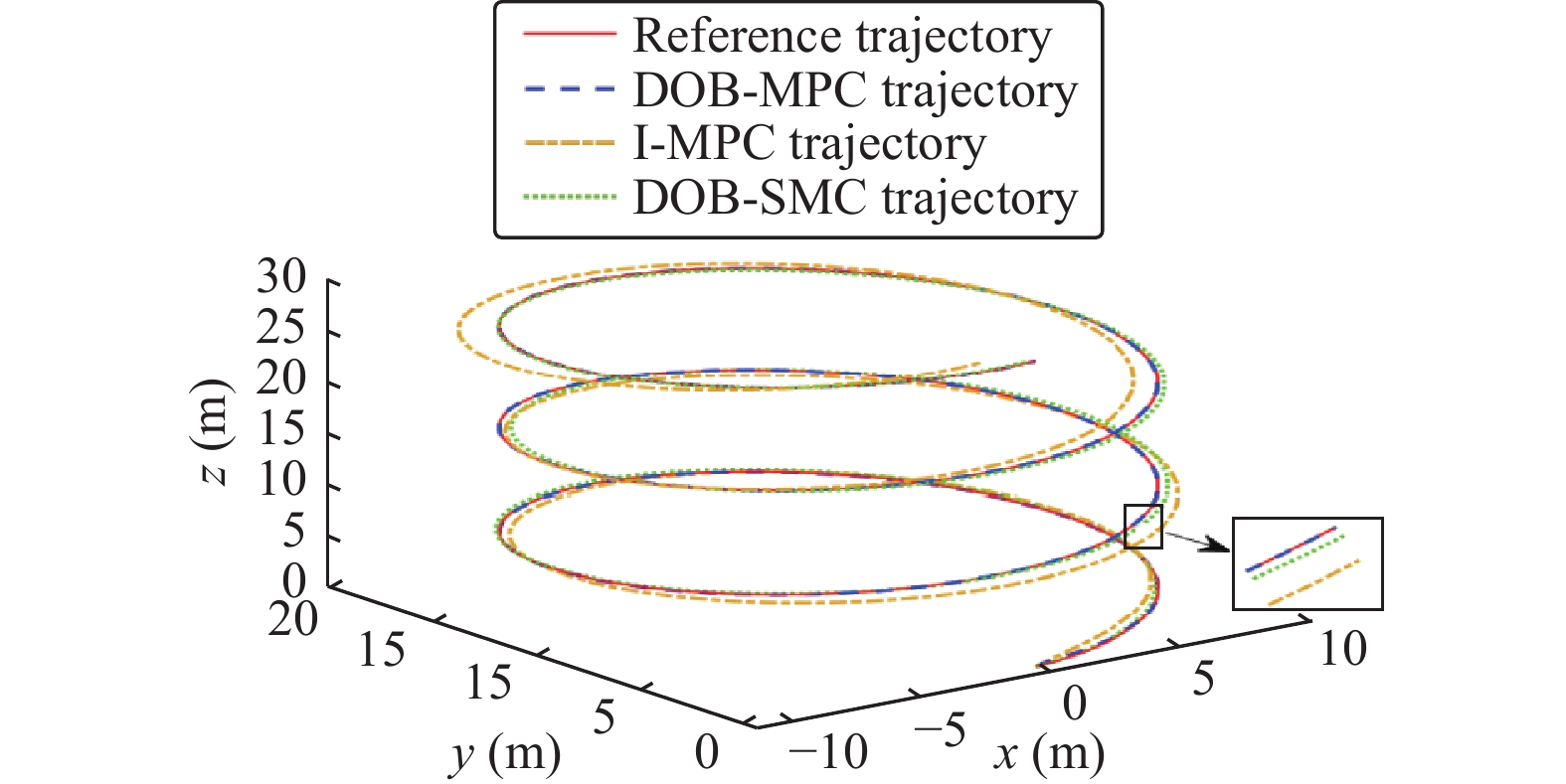
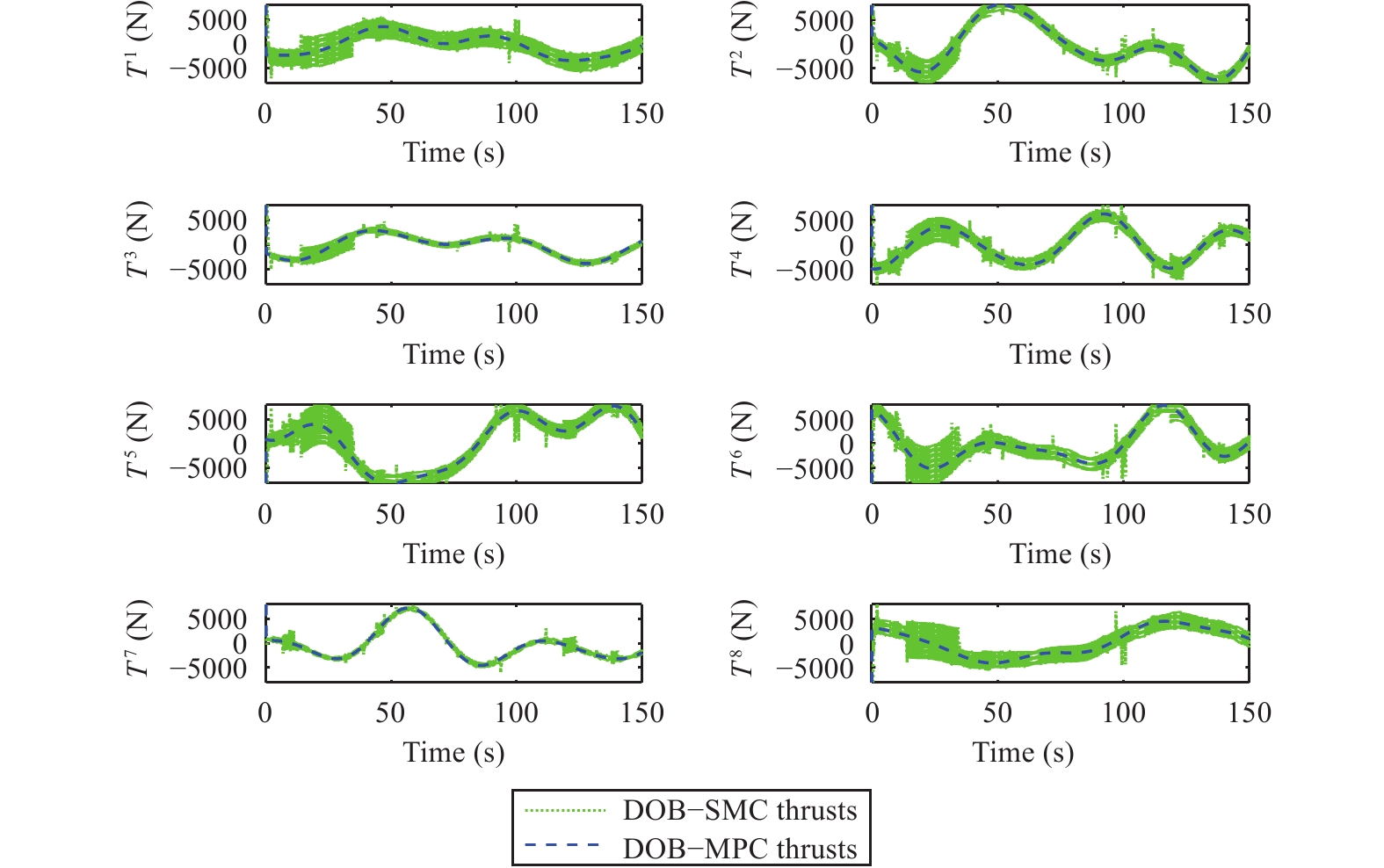
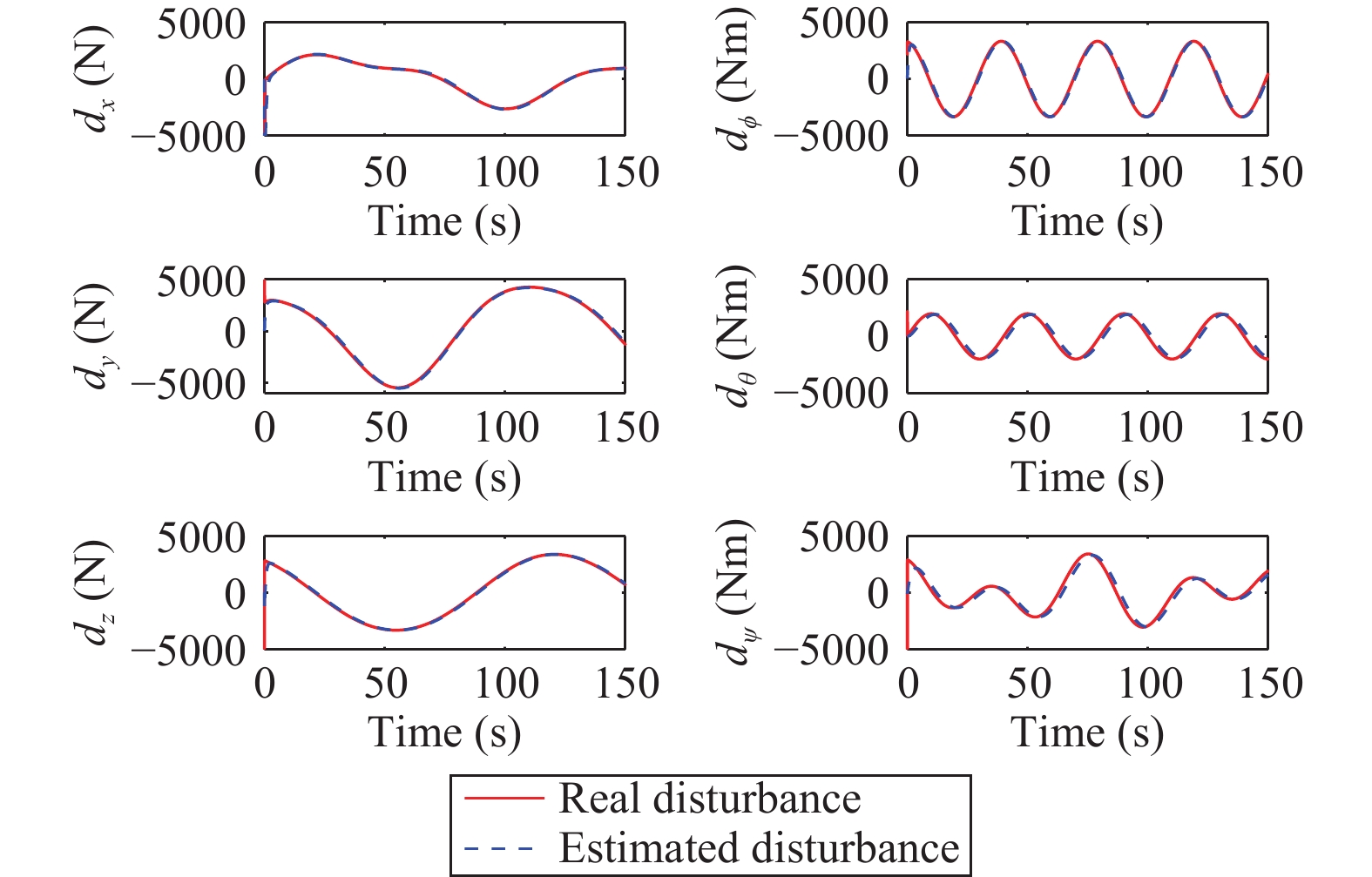
| Citation: | Q. X. Zhong, X. Fang, Z. T. Ding, and F. Liu, “Robust control of manned submersible vehicle with nonlinear MPC and disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1349–1351, May 2023. doi: 10.1109/JAS.2023.123429

|

| [1] |
F. Liu, W. Cui, and X. Li, “China’s first deep manned submersible, JIAOLONG,” Sci. China. Earth. Sci., vol. 53, no. 10, pp. 1407–1410, Oct. 2010. doi: 10.1007/s11430-010-4100-2
|
| [2] |
X. Gao, K. Ding, Y. Ren, et al., “Target deployment and retrieval using JIAOLONG manned submersible in the depth of 6600 m in Mariana Trench,” China Ocean Eng., vol. 31, no. 5, pp. 618–623, Oct. 2017. doi: 10.1007/s13344-017-0071-9
|
| [3] |
T. I. Fossen, Guidance and Control of Ocean Vehicles. New York, USA: Wiley, 1994.
|
| [4] |
W. Cui, “Development of the JIAOLONG deep manned submersible,” Marine Technol. Soc. J., vol. 47, no. 3, pp. 37–54, 2013. doi: 10.4031/MTSJ.47.3.2
|
| [5] |
X. Fang, F. Liu, and X. Gao, “Composite learning control of overactuated manned submersible vehicle with disturbance uncertainty and measurement noise,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 12, pp. 5575–5583, Dec. 2021. doi: 10.1109/TNNLS.2021.3053292
|
| [6] |
Y. Liao, M. Zhang, L. Wan, and Y. Li, “Trajectory tracking control for underactuated unmanned surface vehicles with dynamic uncertainties,” J. Central South Univ. Technol., vol. 23, no. 2, pp. 370–378, Feb. 2016. doi: 10.1007/s11771-016-3082-4
|
| [7] |
D. Mu, G. Wang, and Y. Fan, “Trajectory tracking control for underactuated unmanned surface vehicle subject to uncertain dynamics and input saturation,” Neural Comput. Appl., vol. 33, no. 19, pp. 12777–12789, Oct. 2021. doi: 10.1007/s00521-021-05922-x
|
| [8] |
X. Fang, F. Liu, and S. Zhao, “Trajectory tracking control for manned submersible system with disturbances via disturbance characterization index approach,” Int. J. Robust Nonlinear Control, vol. 29, no. 16, pp. 5641–5653, Nov. 2019. doi: 10.1002/rnc.4696
|
| [9] |
J. B. Rawlings and D. Q. Mayne, Model Predictive Control: Theory and Design. Madison, USA: Nob Hill Publishing, 2009.
|
| [10] |
D. Q. Mayne, J. B. Rawlings, C. V. Rao, and P. O. M. Scokaert, “Constrained model predictive control: Stability and optimality,” Automatica, vol. 36, no. 6, pp. 789–814, Jun. 2000. doi: 10.1016/S0005-1098(99)00214-9
|
| [11] |
W.-H. Chen, D. J. Ballance, and P. J. Gawthrop, “Optimal control of nonlinear systems: A predictive control approach,” Automatica, vol. 39, no. 44, pp. 633–641, Apr. 2003.
|
| [12] |
W.-H. Chen, D. J. Ballance, P. J. Gawthrop, and J. O’Reilly, “A nonlinear disturbance observer for robotic manipulators,” IEEE Trans. Ind. Electron., vol. 47, no. 4, pp. 932–938, Aug. 2000. doi: 10.1109/41.857974
|
| [13] |
S. Li, J. Yang, W.-H. Chen, et al., Disturbance Observer Based Control: Methods and Applications. Boca Raton, USA: CRC Press, 2014.
|
| [14] |
M. Chen, “Robust tracking control for self-balancing mobile robots using disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 3, pp. 458–465, Jul. 2017. doi: 10.1109/JAS.2017.7510544
|
| [15] |
C. Wang, Z. Zuo, Z. Qi, et al., “Predictor-based extended-state-observer design for consensus of MASs with delays and disturbances,” IEEE Trans. Cybern., vol. 49, no. 4, pp. 1259–1269, Apr. 2019. doi: 10.1109/TCYB.2018.2799798
|
| [16] |
Z. Ding, “Consensus disturbance rejection with disturbance observers,” IEEE Trans. Ind. Electron., vol. 62, no. 9, pp. 5829–5837, Sept. 2015. doi: 10.1109/TIE.2015.2442218
|
| [17] |
B. Sun, D. Zhu, and S. Yang, “A bioinspired filtered backstepping tracking control of 7000-m manned submarine vehicle,” IEEE Trans. Ind. Electron., vol. 61, no. 7, pp. 3682–3693, Jul. 2014. doi: 10.1109/TIE.2013.2267698
|
| [18] |
H. K. Khalil, Nonlinear Systems, 2nd ed. Upper Saddle River, USA: Prentice-Hall, 1996.
|
| [19] |
Z. Liu, “Ship adaptive course keeping control with nonlinear disturbance observer,” Special Section on Advanced Modeling and Control of Complex Mechatronic Systems With Nonlinearity and Uncertainty, vol. 5, no. 1, pp. 17567–17575, 2017.
|
Figures(3) / Tables(1)






 DownLoad:
DownLoad: