2018, 5(3): 645-661.
doi: 10.1109/JAS.2018.7511063
Abstract:
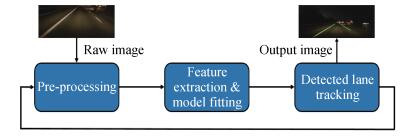
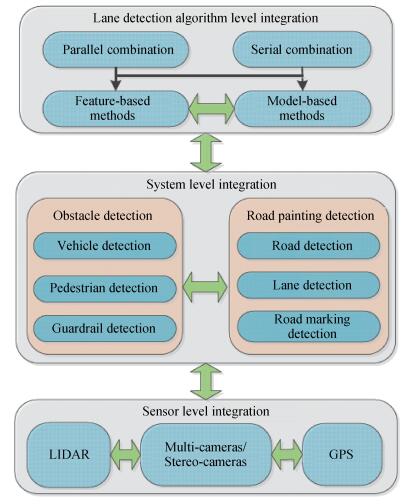
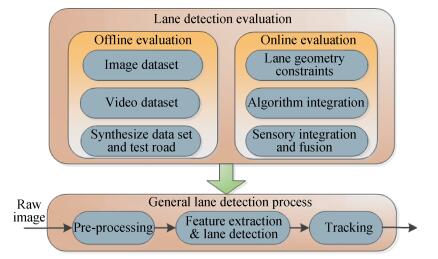
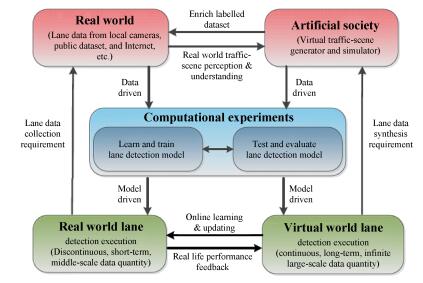
Lane detection is a fundamental aspect of most current advanced driver assistance systems (ADASs). A large number of existing results focus on the study of vision-based lane detection methods due to the extensive knowledge background and the low-cost of camera devices. In this paper, previous visionbased lane detection studies are reviewed in terms of three aspects, which are lane detection algorithms, integration, and evaluation methods. Next, considering the inevitable limitations that exist in the camera-based lane detection system, the system integration methodologies for constructing more robust detection systems are reviewed and analyzed. The integration methods are further divided into three levels, namely, algorithm, system, and sensor. Algorithm level combines different lane detection algorithms while system level integrates other object detection systems to comprehensively detect lane positions. Sensor level uses multi-modal sensors to build a robust lane recognition system. In view of the complexity of evaluating the detection system, and the lack of common evaluation procedure and uniform metrics in past studies, the existing evaluation methods and metrics are analyzed and classified to propose a better evaluation of the lane detection system. Next, a comparison of representative studies is performed. Finally, a discussion on the limitations of current lane detection systems and the future developing trends toward an Artificial Society, Computational experiment-based parallel lane detection framework is proposed.
Yang Xing, Chen Lv, Long Chen, Huaji Wang, Hong Wang, Dongpu Cao, Efstathios Velenis and Fei-Yue Wang, "Advances in Vision-Based Lane Detection: Algorithms, Integration, Assessment, and Perspectives on ACP-Based Parallel Vision," IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 645-661, Mar. 2018. doi: 10.1109/JAS.2018.7511063.
















 E-mail Alert
E-mail Alert