2021, 8(5): 1079-1094.
doi: 10.1109/JAS.2021.1003982
Abstract:
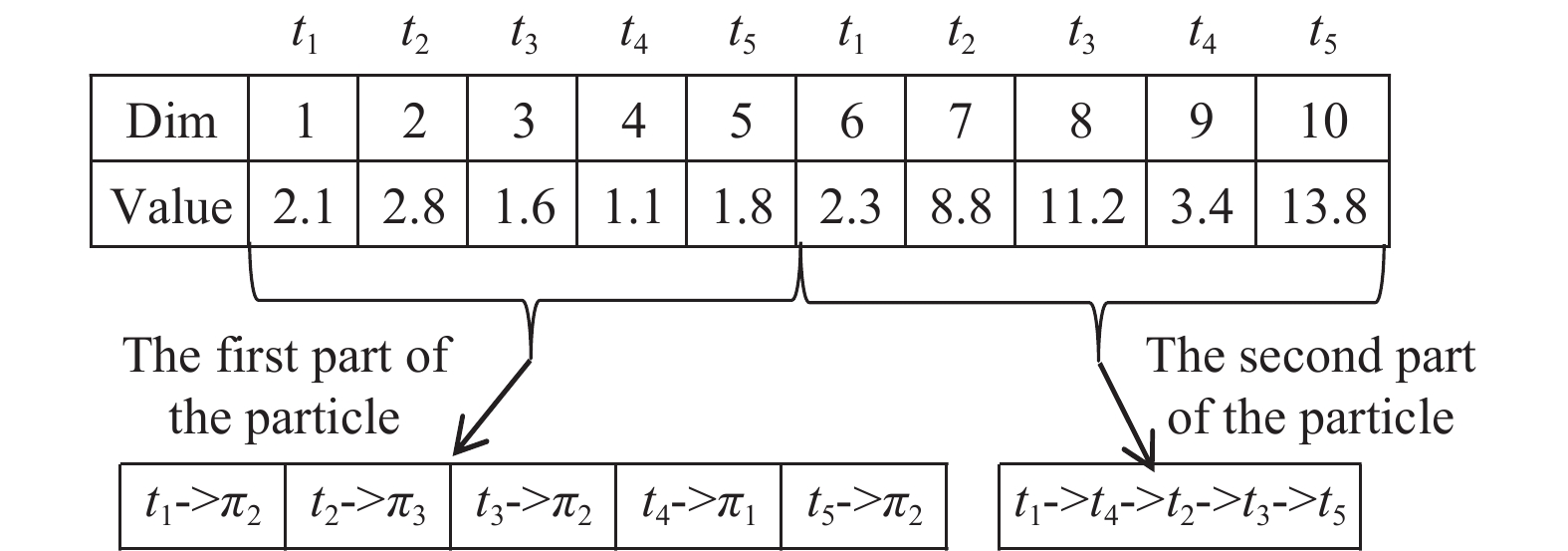
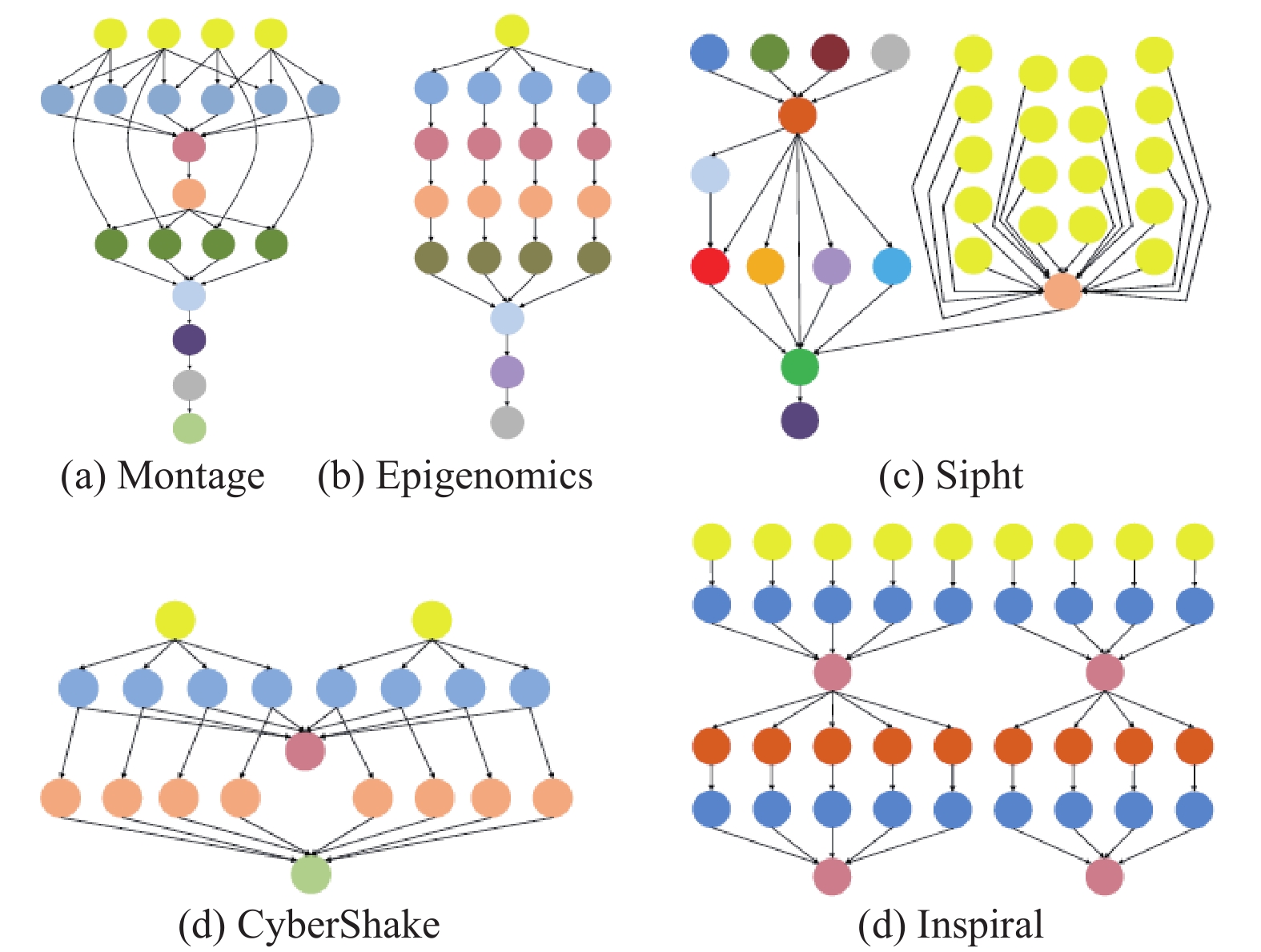
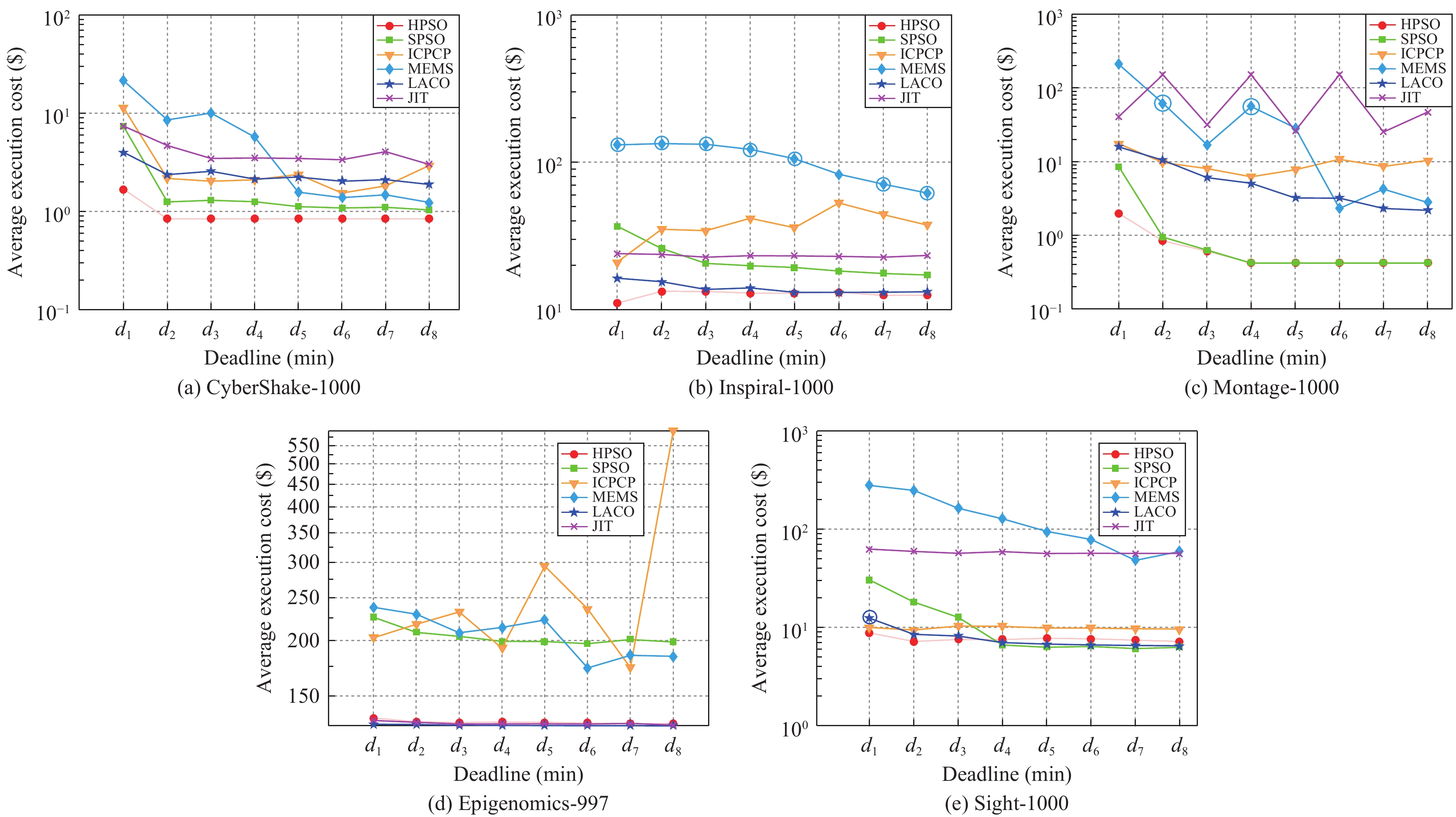
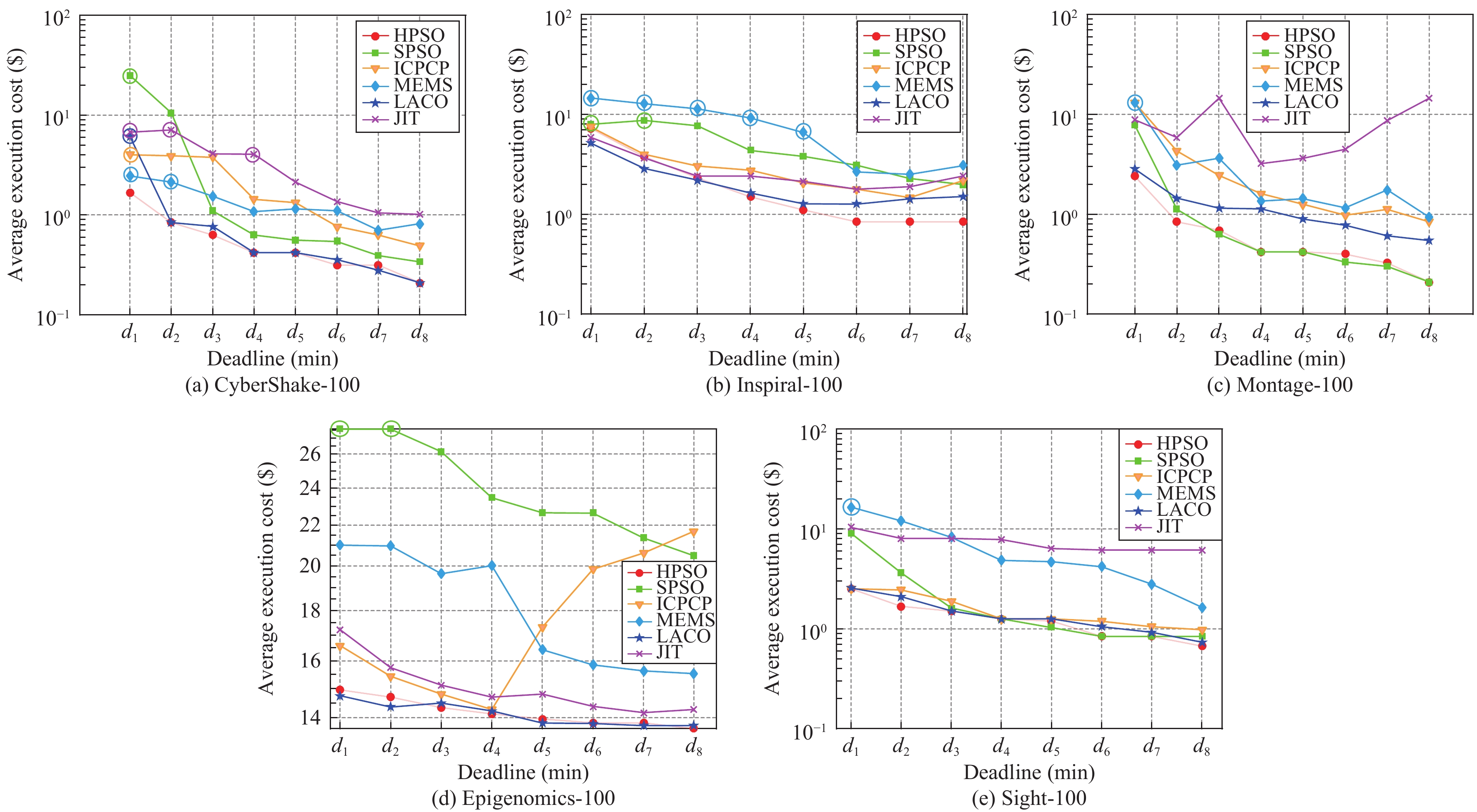
Workflow scheduling is a key issue and remains a challenging problem in cloud computing. Faced with the large number of virtual machine (VM) types offered by cloud providers, cloud users need to choose the most appropriate VM type for each task. Multiple task scheduling sequences exist in a workflow application. Different task scheduling sequences have a significant impact on the scheduling performance. It is not easy to determine the most appropriate set of VM types for tasks and the best task scheduling sequence. Besides, the idle time slots on VM instances should be used fully to increase resources’ utilization and save the execution cost of a workflow. This paper considers these three aspects simultaneously and proposes a cloud workflow scheduling approach which combines particle swarm optimization (PSO) and idle time slot-aware rules, to minimize the execution cost of a workflow application under a deadline constraint. A new particle encoding is devised to represent the VM type required by each task and the scheduling sequence of tasks. An idle time slot-aware decoding procedure is proposed to decode a particle into a scheduling solution. To handle tasks’ invalid priorities caused by the randomness of PSO, a repair method is used to repair those priorities to produce valid task scheduling sequences. The proposed approach is compared with state-of-the-art cloud workflow scheduling algorithms. Experiments show that the proposed approach outperforms the comparative algorithms in terms of both of the execution cost and the success rate in meeting the deadline.
Y. Wang and X. Q. Zuo, “An effective cloud workflow scheduling approach combining pso and idle time slot-aware rules,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 1079–1094, May 2021. doi: 10.1109/JAS.2021.1003982.









 E-mail Alert
E-mail Alert