A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 6
Volume 11
Issue 6
IEEE/CAA Journal of Automatica Sinica
| Citation: | Z. Wu, Y. Zhao, F. Li, T. Yang, Y. Shi, and W. Gui, “Asynchronous learning-based output feedback sliding mode control for semi-Markov jump systems: A descriptor approach,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 6, pp. 1358–1369, Jun. 2024. doi: 10.1109/JAS.2024.124416

|
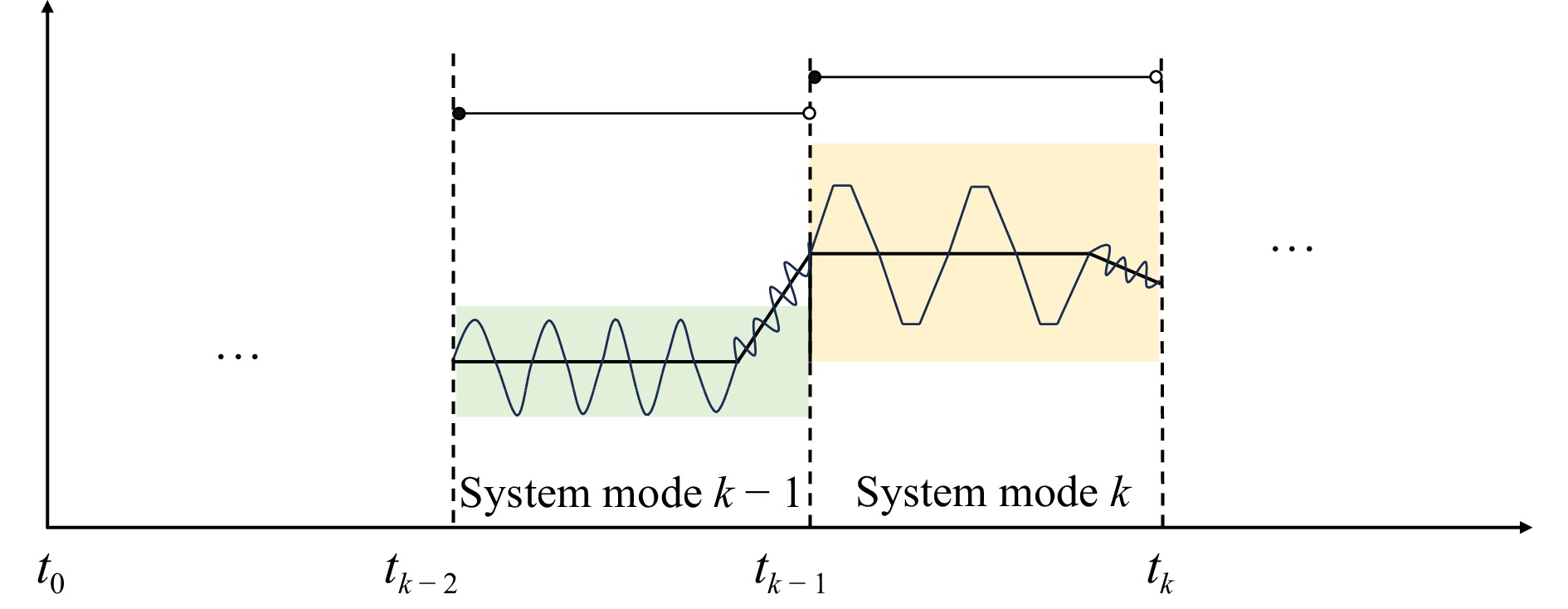
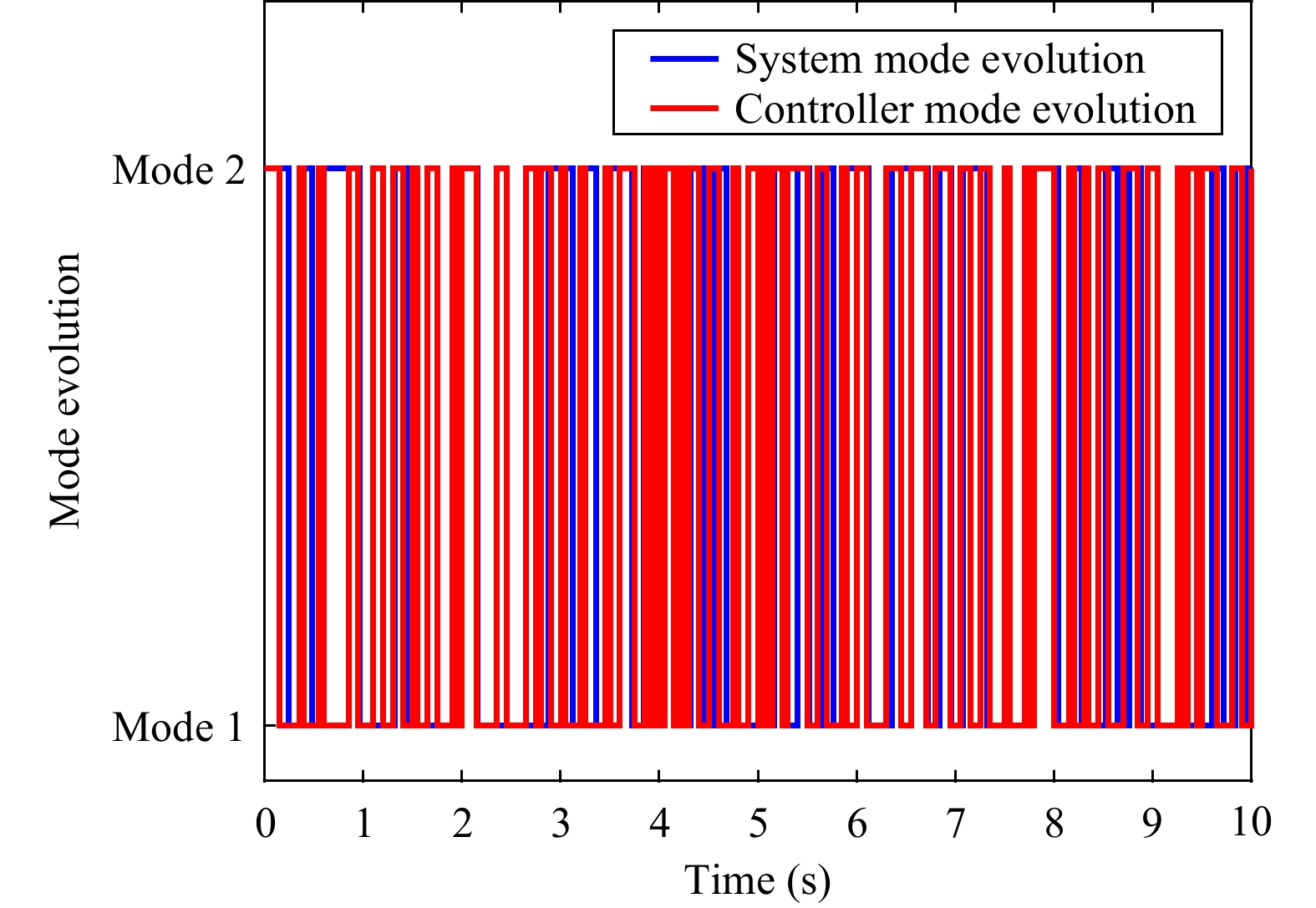
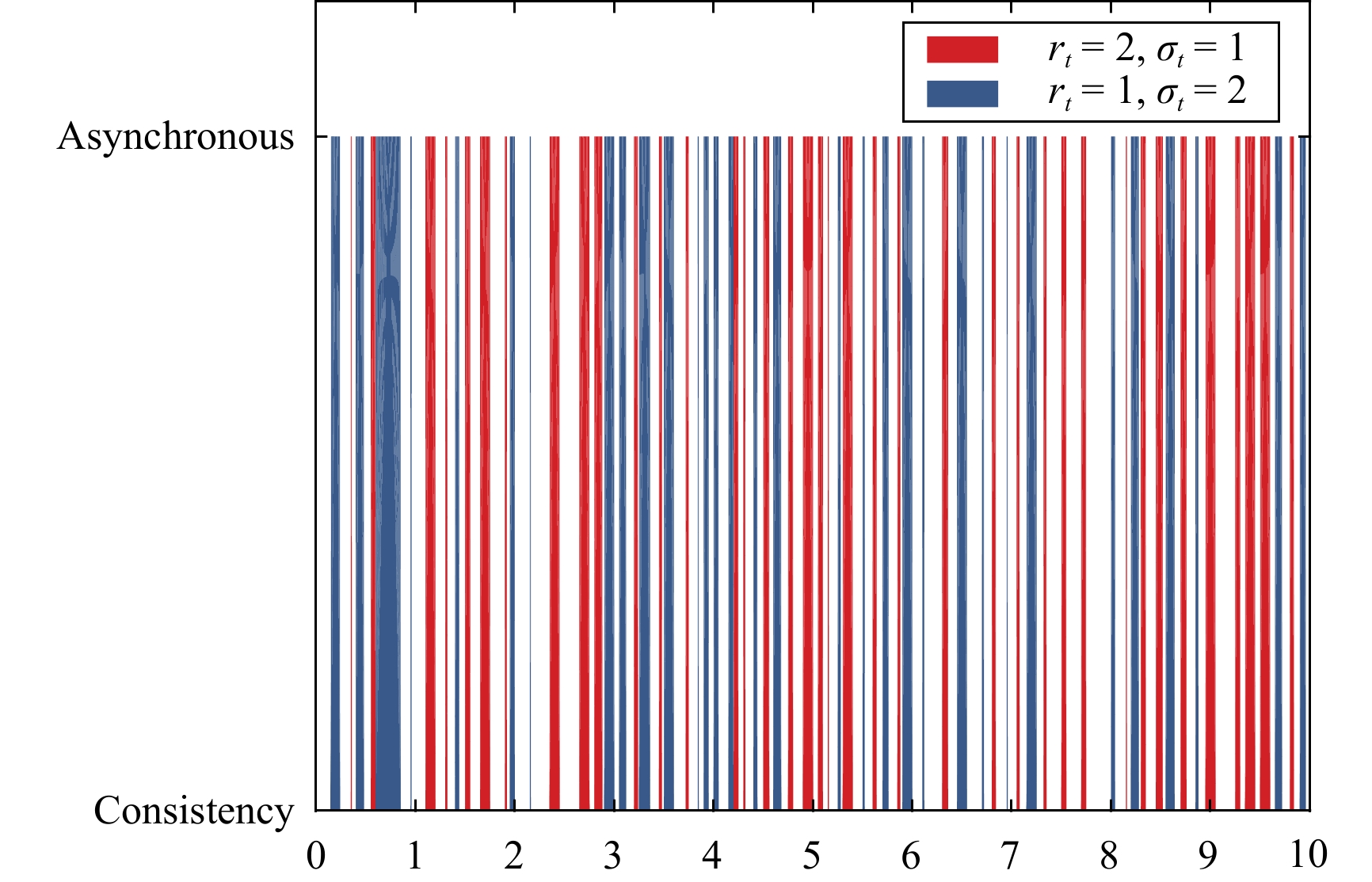
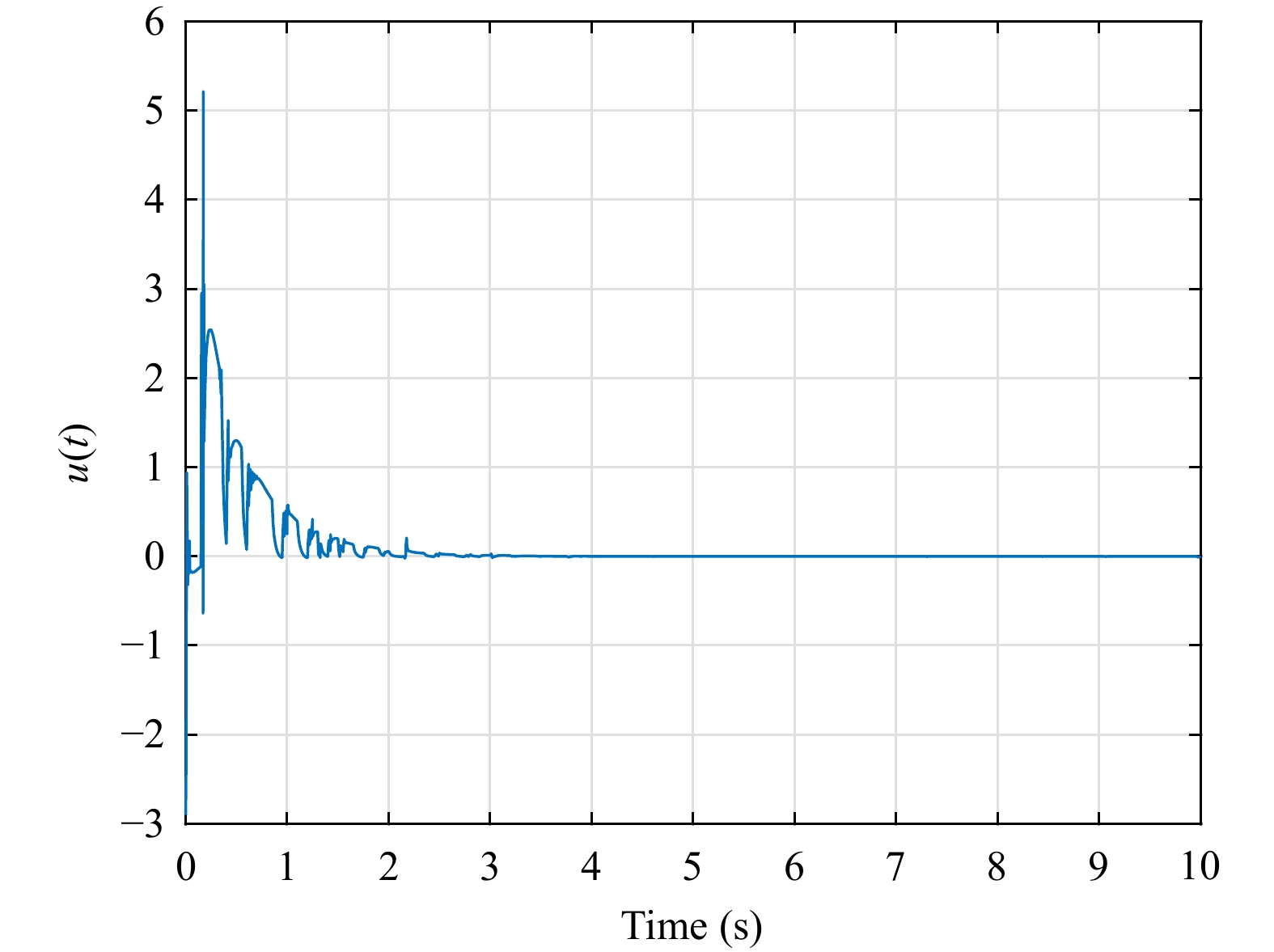
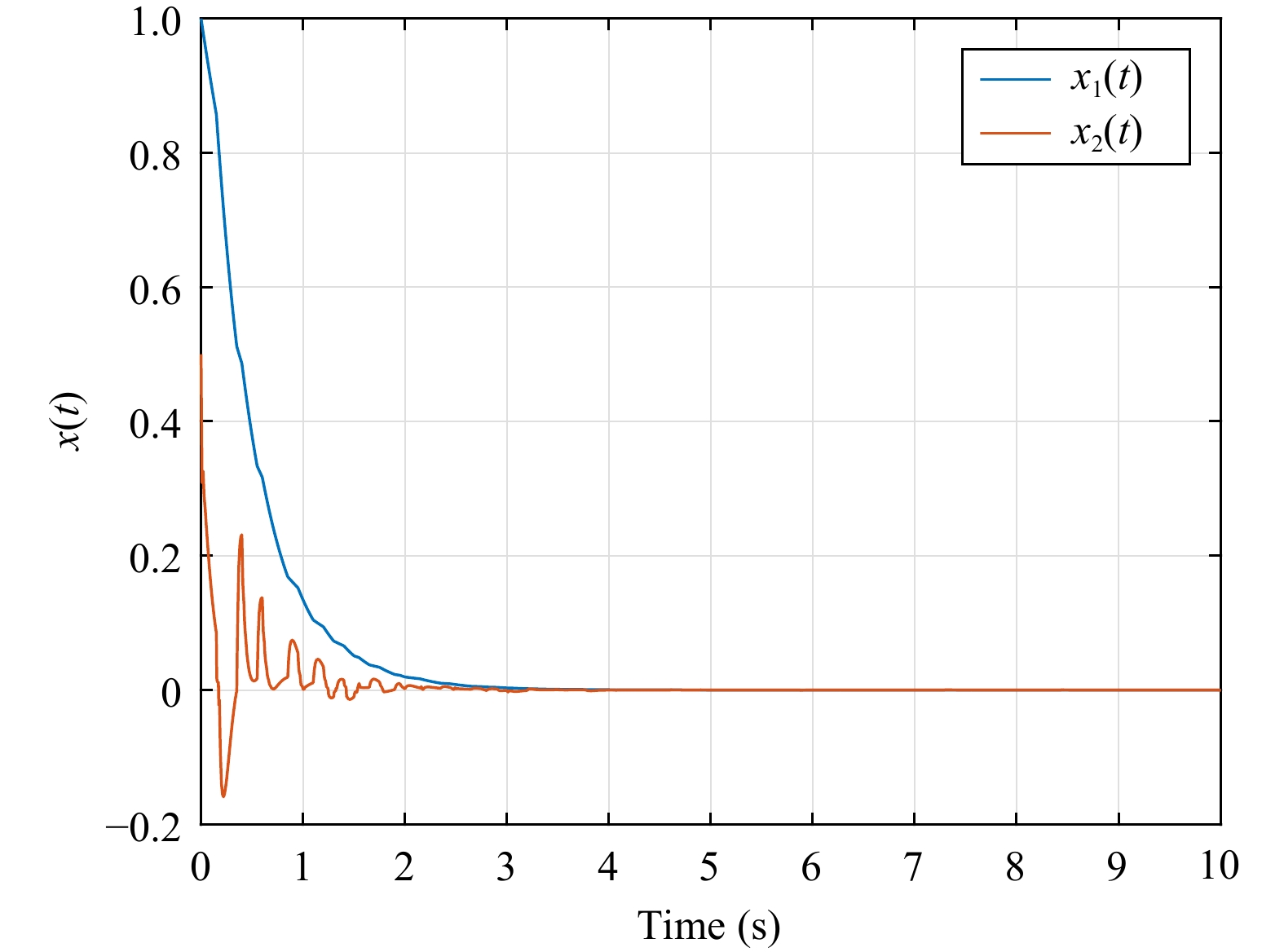
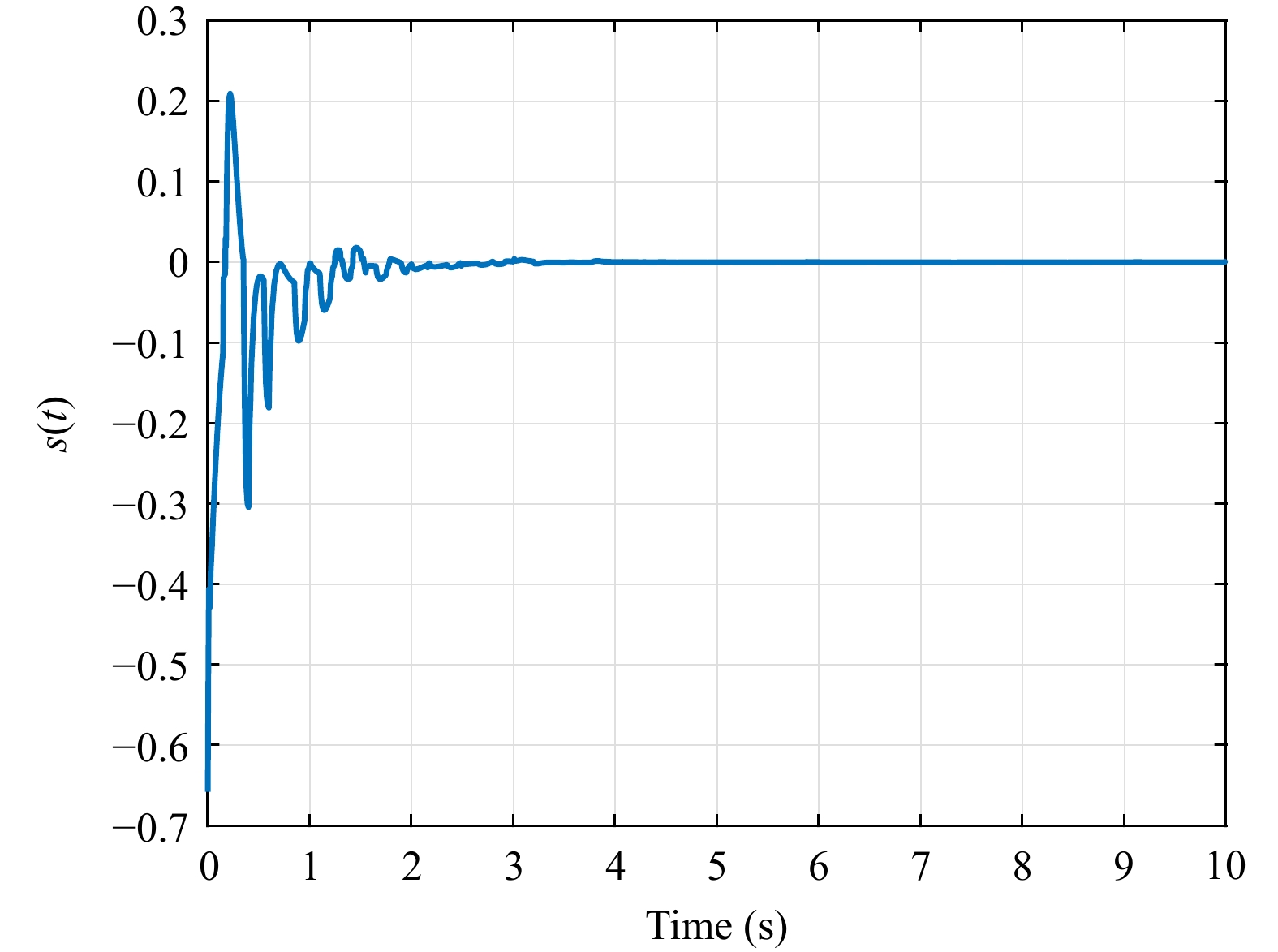
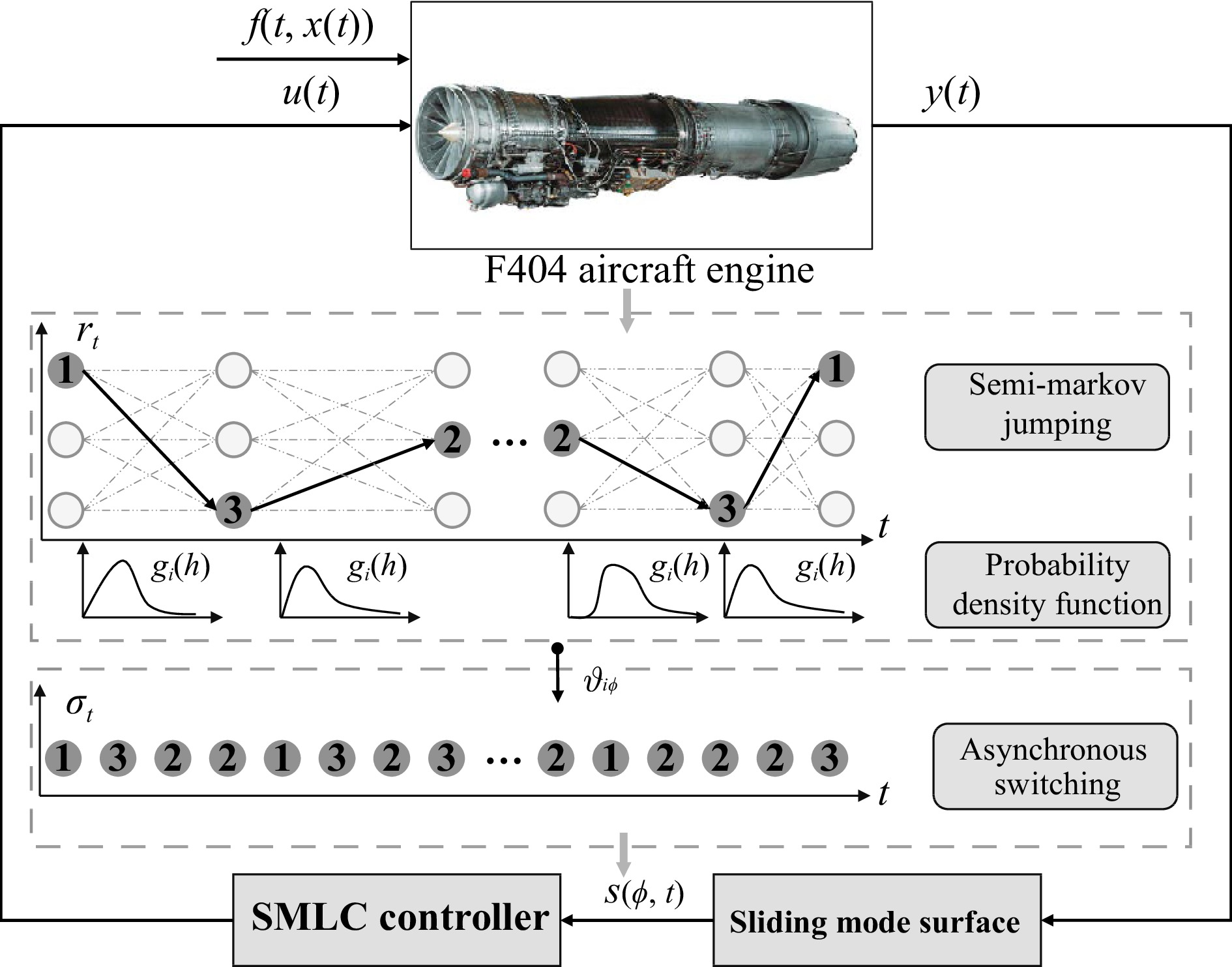
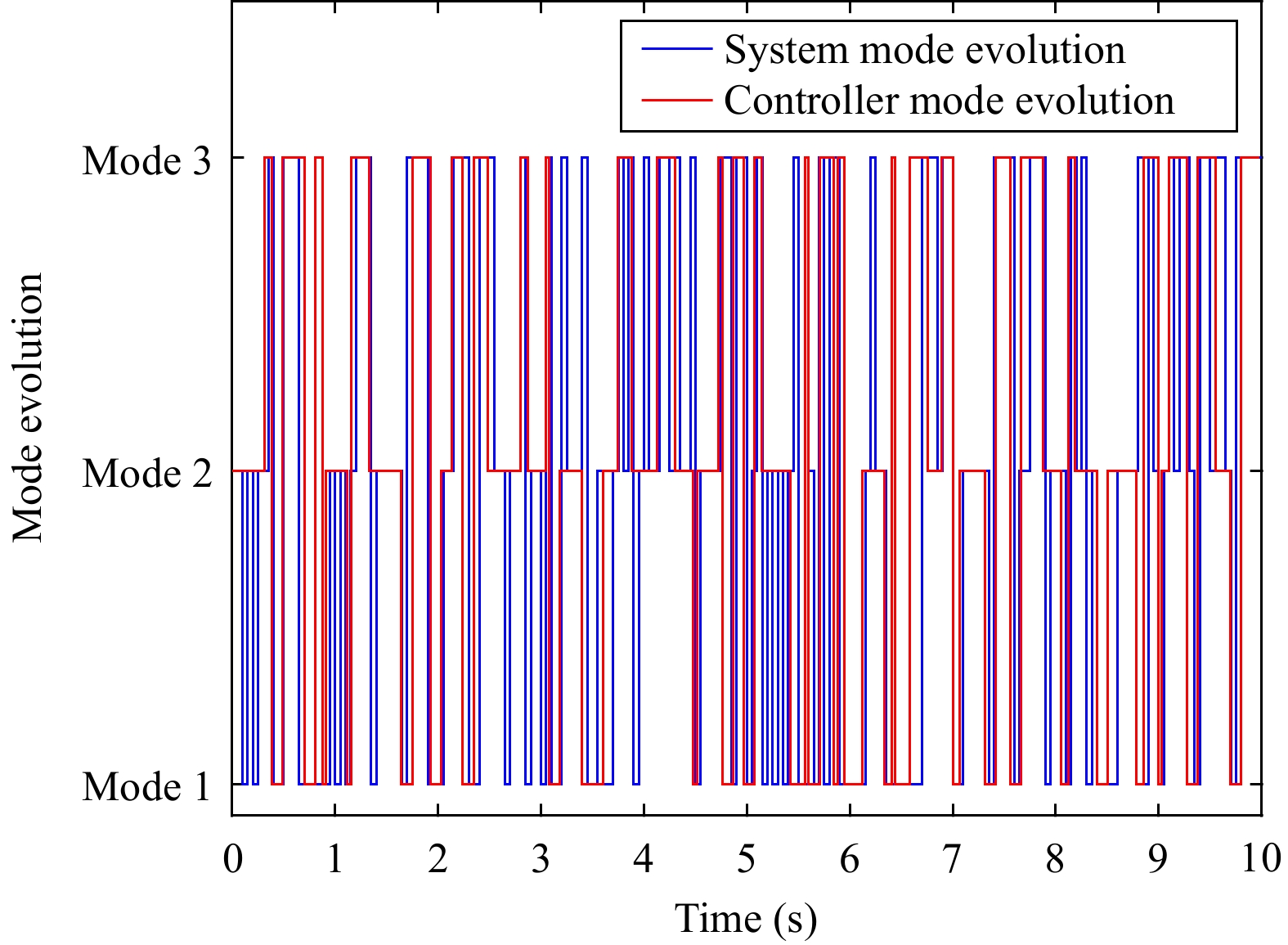
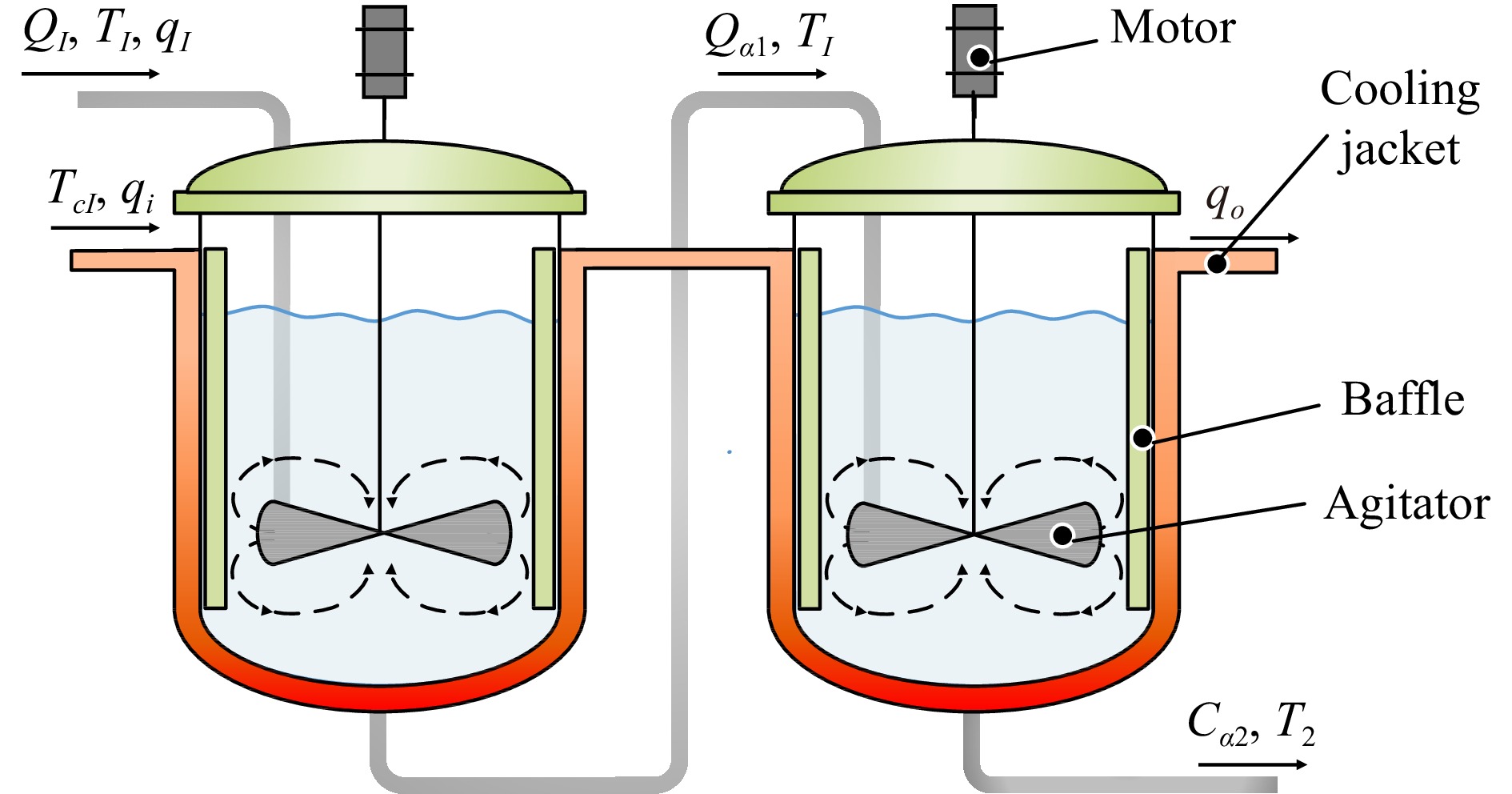
This paper presents an asynchronous output-feedback control strategy of semi-Markovian systems via sliding mode-based learning technique. Compared with most literature results that require exact prior knowledge of system state and mode information, an asynchronous output-feedback sliding surface is adopted in the case of incompletely available state and non-synchronization phenomenon. The holonomic dynamics of the sliding mode are characterized by a descriptor system in which the switching surface is regarded as the fast subsystem and the system dynamics are viewed as the slow subsystem. Based upon the co-occurrence of two subsystems, the sufficient stochastic admissibility criterion of the holonomic dynamics is derived by utilizing the characteristics of cumulative distribution functions. Furthermore, a recursive learning controller is formulated to guarantee the reachability of the sliding manifold and realize the chattering reduction of the asynchronous switching and sliding motion. Finally, the proposed theoretical method is substantiated through two numerical simulations with the practical continuous stirred tank reactor and F-404 aircraft engine model, respectively.

| [1] |
M. V. Basin, P. Yu, and Y. B. Shtessel, “Hypersonic missile adaptive sliding mode control using finite-time and fixed-time observers,” IEEE Trans. Ind. Electrons., vol. 23, no. 1, pp. 57–67, 2018.
|
| [2] |
M. V. Basin, P. C. R. Ramirez, and F. Guerra-Avellaneda, “Continuous fixed-time controller design for mechatronic systems with incomplete measurements,” IEEE/ASME Trans. Mechatronics, vol. 23, no. 1, pp. 57–67, 2018. doi: 10.1109/TMECH.2017.2700459
|
| [3] |
X. Su, Y. Wen, P. Shi, S. Wang, and W. Assawinchaichote, “Event-triggered fuzzy control for nonlinear systems via sliding mode approach,” IEEE Trans. Fuzzy Syst., vol. 29, no. 2, pp. 336–344, 2021. doi: 10.1109/TFUZZ.2019.2952798
|
| [4] |
J. Liu, L. Wu, C. Wu, W. Luo, and L. G. Franquelo, “Event-triggering dissipative control of switched stochastic systems via sliding mode,” Automatica, vol. 103, pp. 261–273, 2019. doi: 10.1016/j.automatica.2019.01.029
|
| [5] |
Y. Wei, J. H. Park, J. Qiu, L. Wu, and H. Jung, “Sliding mode control for semi-Markovian jump systems via output feedback,” Automatica, vol. 21, pp. 133–141, 2017.
|
| [6] |
L. Wu, J. Liu, S. Vazquez, and S. K. Mazumder, “Sliding mode control in power converters and drives: A review,” IEEE/CAA J. Autom. Sinica., vol. 9, no. 3, pp. 392–406, 2022. doi: 10.1109/JAS.2021.1004380
|
| [7] |
J. Li, Y. Niu, and J. Song, “Sliding mode control design under multiple nodes round-robin-like protocol and packet length-dependent lossy network,” Automatica, vol. 134, p. 109942, 2021. doi: 10.1016/j.automatica.2021.109942
|
| [8] |
L. Ovalle, H. Ríos, M. Llama, and L. Fridman, “Continuous sliding-mode output-feedback control for stabilization of a class of underactuated systems,” IEEE Trans. Autom. Control, vol. 67, no. 2, pp. 986–992, 2022. doi: 10.1109/TAC.2021.3075179
|
| [9] |
V. Utkin, “Discussion aspects of high-order sliding mode control,” IEEE Trans. Autom. Control, vol. 61, no. 3, pp. 829–833, 2016. doi: 10.1109/TAC.2015.2450571
|
| [10] |
Y. Liu, H. Li, R. Lu, Z. Zuo, and X. Li, “An overview of finite/fixed-time control and its application in engineering systems,” IEEE/CAA J. Autom. Sinica., vol. 9, no. 12, pp. 2106–2120, 2022. doi: 10.1109/JAS.2022.105413
|
| [11] |
A. Mustafa, N. K. Dhar, and N. K. Verma, “Event-triggered sliding mode control for trajectory tracking of nonlinear systems,” IEEE/CAA J. Autom. Sinica., vol. 7, no. 1, pp. 307–314, 2020. doi: 10.1109/JAS.2019.1911654
|
| [12] |
Z. Cao, Y. Niu, and C. Peng, “Finite-time stabilization of uncertain Markovian jump systems: An adaptive gain-scheduling control method,” IEEE Trans. Autom. Control, 2023. doi: 10.1109/TAC.2023.3307951,2023
|
| [13] |
Z. Zhong, X. Wang, and H. K. Lam, “Finite-time fuzzy sliding mode control for nonlinear descriptor systems,” IEEE/CAA J. Autom. Sinica., vol. 8, no. 6, pp. 1141–1152, 2021. doi: 10.1109/JAS.2021.1004024
|
| [14] |
A. Rosales, Y. Shtessel, L. Fridman, and C. B. Panathula, “Chattering analysis of HOSM controlled systems: Frequency domain approach,” IEEE Trans. Autom. Control, vol. 62, no. 8, pp. 4109–4115, 2017. doi: 10.1109/TAC.2016.2619559
|
| [15] |
M. Liu, L. Zhang, P. Shi, and Y. Zhao, “Fault estimation sliding mode observer with digital communication constraints,” IEEE Trans. Autom. Control, vol. 63, no. 10, pp. 3434–3441, 2018. doi: 10.1109/TAC.2018.2794826
|
| [16] |
G. P. Incremona, M. Rubagotti, M. Tanelli, and A. Ferrara, “A general framework for switched and variable gain higher order sliding mode control,” IEEE Trans. Autom. Control, vol. 66, no. 4, pp. 1718–1724, 2021. doi: 10.1109/TAC.2020.2996423
|
| [17] |
F. Li, Z. Wu, C. Yang, Y. Shi, T. Huang, and W. Gui, “A novel learning-based asynchronous sliding mode control for discrete-time semi-Markov jump systems,” Automatica, vol. 143, p. 110428, 2022. doi: 10.1016/j.automatica.2022.110428
|
| [18] |
Z. Man, S. Khoo, X. Yu, and J. Jin, “A new sliding mode-based learning control scheme,” in Proc. 6th IEEE Conf. Industrial Electronics and Applications, 2011, pp. 1906–1911.
|
| [19] |
D. M. Tuan, Z. Man, C. Zhang, and J. Jin, “A new sliding mode-based learning control for uncertain discrete-time systems,” in Proc. 12th Int. Conf. Control Automation Robotics & Vision, 2012, pp. 741–746.
|
| [20] |
X. Hu, C. Hu, X. Si, and Y. Zhao, “Robust sliding mode-based learning control for MIMO nonlinear nonminimum phase system in general form,” IEEE Trans. Cybern., vol. 49, no. 10, pp. 3793–3805, 2019. doi: 10.1109/TCYB.2018.2874682
|
| [21] |
L. Liu, L. Ma, J. Zhang, and Y. Bo, “Sliding mode control for nonlinear Markovian jump systems under denial-of-service attacks,” IEEE/CAA J. Autom. Sinica., vol. 7, no. 6, pp. 1638–1648, 2020. doi: 10.1109/JAS.2019.1911531
|
| [22] |
O. L. V. Costa, M. D. Fragoso, and M. G. Todorov, “A detector-based approach for the H2 control of Markov jump linear systems with partial information,” IEEE Trans. Autom. Control, vol. 60, no. 5, pp. 1219–1234, 2015. doi: 10.1109/TAC.2014.2366253
|
| [23] |
J. Song, Y. Niu, and Y. Zou, “Asynchronous sliding mode control of Markovian jump systems with time-varying delays and partly accessible mode detection probabilities,” Automatica, vol. 93, pp. 33–41, 2018. doi: 10.1016/j.automatica.2018.03.037
|
| [24] |
X. Su, C. Wang, H. Chang, Y. Yang, and W. Assawinchaichote, “Event-triggered sliding mode control of networked control systems with Markovian jump parameters,” Automatica, vol. 125, p. 109405, 2021. doi: 10.1016/j.automatica.2020.109405
|
| [25] |
F. Li, C. Du, C. Yang, and W. Gui, “Passivity-based asynchronous sliding mode control for delayed singular Markovian jump systems,” IEEE Trans. Autom. Control, vol. 63, no. 8, pp. 2715–2721, 2018. doi: 10.1109/TAC.2017.2776747
|
| [26] |
F. Li, C. Du, C. Yang, L. Wu, and W. Gui, “Finite-time asynchronous sliding mode control for Markovian jump systems,” Automatica, vol. 109, p. 108503, 2019. doi: 10.1016/j.automatica.2019.108503
|
| [27] |
V. Dragan and E. F. Costa, “Optimal stationary dynamic output-feedback controllers for discrete-time linear systems with Markovian jumping parameters and additive white noise perturbations,” IEEE Trans. Autom. Control, vol. 61, no. 12, pp. 3912–3924, 2016. doi: 10.1109/TAC.2016.2529505
|
| [28] |
G. Ciardo, R. A. Marie, B. Sericola, and K. S. Trivedi, “Performability analysis using semi-Markov reward processes,” IEEE Trans. Comput., vol. 39, no. 10, pp. 1251–1264, 2017.
|
| [29] |
S. Al-Dahidi, F. D. Maio, P. Baraldi, and E. Zio, “Remaining useful life estimation in heterogeneous fleets working under variable operating conditions,” Reliab. Eng. Syst. Saf., vol. 156, pp. 109–124, 2016. doi: 10.1016/j.ress.2016.07.019
|
| [30] |
L. Zhang, T. Yang, and P. Colaneri, “Stability and stabilization of semi-Markov jump linear systems with exponentially modulated periodic distributions of sojourn time,” IEEE Trans. Autom. Control, vol. 62, no. 6, pp. 2870–2885, 2017. doi: 10.1109/TAC.2016.2618844
|
| [31] |
Z. Cao, Y. Niu, and Y. Zou, “Adaptive neural sliding mode control for singular semi-Markovian jump systems against actuator attacks,” IEEE Trans. Sys. Man. Cybern. Syst., vol. 51, no. 3, pp. 1523–1533, 2021.
|
| [32] |
J. Huang and Y. Shi, “Stochastic stability and robust stabilization of semi-Markov jump linear systems,” Int. J. Robust. Nonlinear Control, vol. 23, no. 18, pp. 2028–2043, 2013. doi: 10.1002/rnc.2862
|
| [33] |
L. Zhang, Y. Leng, and P. Colaneri, “Stability and stabilization of discrete-time semi-Markov jump linear systems via semi-Markov kernel approach,” IEEE Trans. Autom. Control, vol. 61, no. 2, pp. 503–508, 2016.
|
| [34] |
M. Souza, M. De Almeida, A. R. Fioravanti, and O. L. V. Costa, “ $ {{H}}_2$ output-feedback cluster control forcontinuous semi-Markov jump linear systems with Erlang Dwell times,” IEEE Control Syst. Lett., vol. 7, pp. 109–114, 2023. doi: 10.1109/LCSYS.2022.3185976
|
| [35] |
Z. Wu, P. Shi, Z. Shu, H. Su, and R. Lu, “Passivity-based asynchronous control for Markov jump systems,” IEEE Trans. Autom. Control, vol. 62, no. 4, pp. 2020–2025, 2017. doi: 10.1109/TAC.2016.2593742
|
| [36] |
B. Saporta, and E. F. Costa, “Approximate Kalman-Bucy filter for continuous-time semi-Markov jump linear systems,” IEEE Trans. Autom. Control, vol. 61, no. 8, pp. 2035–2048, 2016. doi: 10.1109/TAC.2015.2495578
|
| [37] |
S. Xu and J. Lam, < italic>Robust Control and Filtering of Singular Systems. Berlin, Germany: Springer, 2006.
|
| [38] |
J. Zhou, J. H. Park, and Q. Kong, “Robust resilient L2 – L∞ control for uncertain stochastic systems with multiple time delays via dynamic output feedback,” J. Franklin Inst., vol. 353, no. 13, pp. 3078–3103, 2016. doi: 10.1016/j.jfranklin.2016.06.004
|
| [39] |
Z. Li, D. Shen, and X. Yu, “Enhancing iterative learning control with fractional power update law,” IEEE/CAA J. Autom. Sinica., vol. 10, no. 5, pp. 1137–1149, 2023. doi: 10.1109/JAS.2023.123525
|
| [40] |
F. Li, X. Cao, C. Zhou, and C. Yang, “Event-triggered asynchronous sliding mode control of CSTR based on Markov model,” J. Franklin Inst., vol. 358, pp. 4687–4704, 2021. doi: 10.1016/j.jfranklin.2021.04.007
|
| [41] |
M. Fang, H. Kodamana, and B. Huang, “Real-time mode diagnosis for processes with multiple operating conditions using switching conditional random fields,” IEEE Trans. Ind. Electron., vol. 67, no. 6, pp. 5060–5070, 2020. doi: 10.1109/TIE.2019.2924876
|
Figures(13)






 DownLoad:
DownLoad: