A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 5
Volume 11
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | Y. Yuan, H. Duan, and Z. Zeng, “Prescribed performance evolution control for quadrotor autonomous shipboard landing,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 5, pp. 1151–1162, May 2024. doi: 10.1109/JAS.2024.124254

|
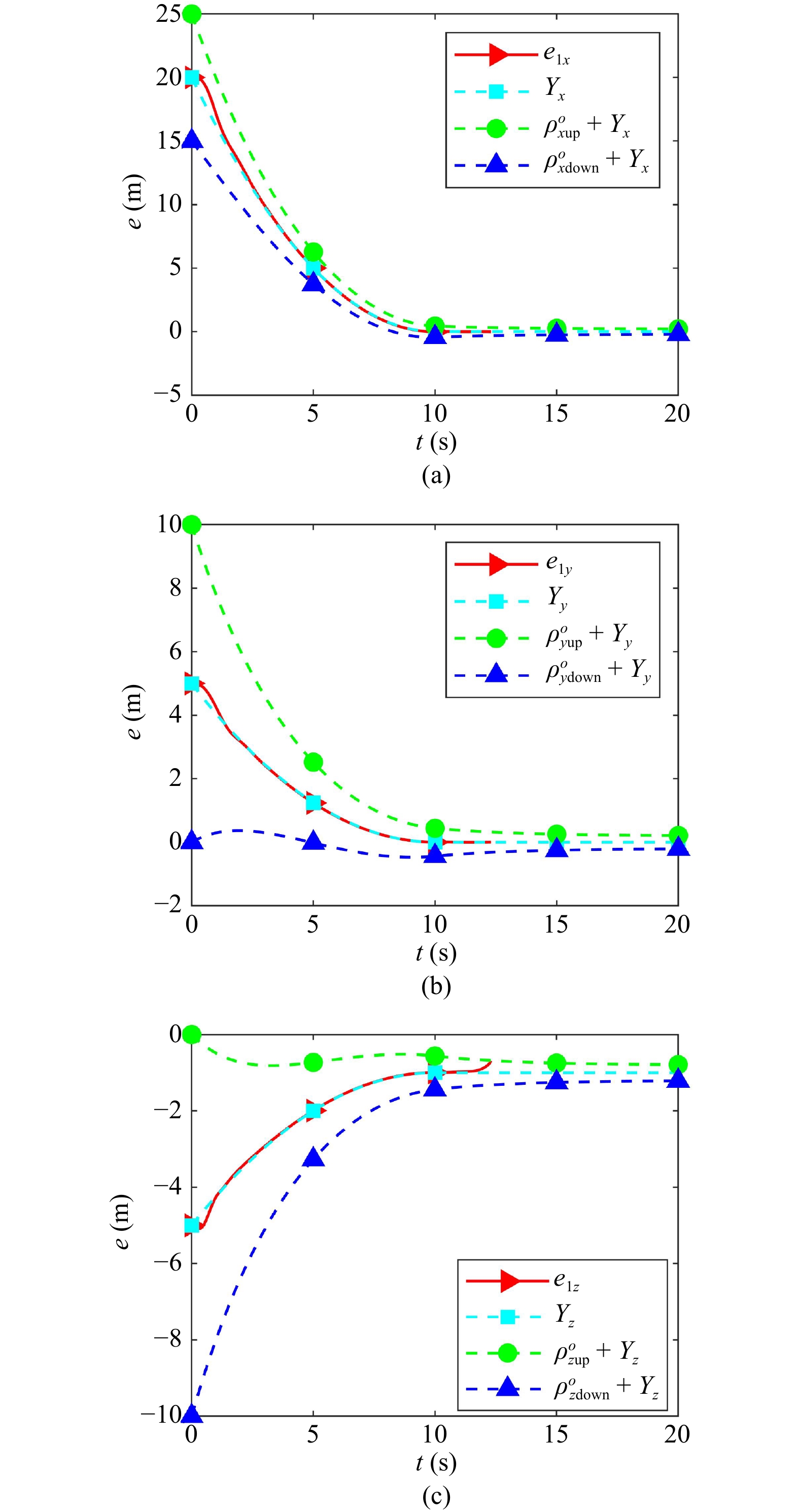
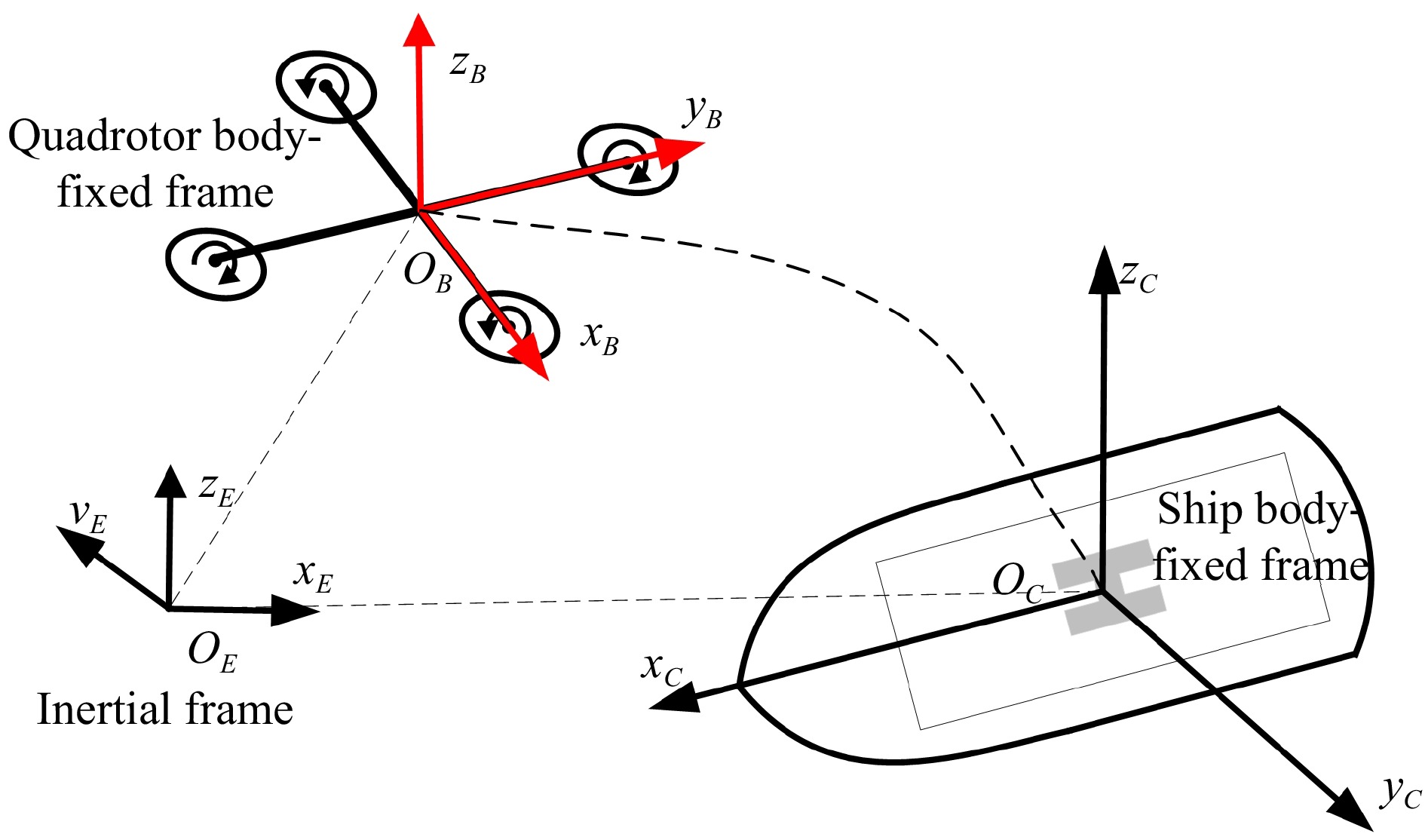
The shipboard landing problem for a quadrotor is addressed in this paper, where the ship trajectory tracking control issue is transformed into a stabilization control issue by building a relative position model. To guarantee both transient performance and steady-state landing error, a prescribed performance evolution control (PPEC) method is developed for the relative position control. In addition, a novel compensation system is proposed to expand the performance boundaries when the input saturation occurs and the error exceeds the predefined threshold. Considering the wind and wave on the relative position model, an adaptive sliding mode observer (ASMO) is designed for the disturbance with unknown upper bound. Based on the dynamic surface control framework, a shipboard landing controller integrating PPEC and ASMO is established for the quadrotor, and the relative position control error is guaranteed to be uniformly ultimately bounded. Simulation results have verified the feasibility and effectiveness of the proposed shipboard landing control scheme.

| [1] |
Y. Yuan, Y. Deng, S. Luo, H. Duan, and C. Wei, “Hybrid formation control framework for solar-powered quadrotors via adaptive fission pigeon-inspired optimization,” Aerospace Science and Technology, vol. 126, p. 107564, 2022. doi: 10.1016/j.ast.2022.107564
|
| [2] |
Y. Yuan and H. Duan, “Active disturbance rejection attitude control of unmanned quadrotor via paired coevolution pigeon-inspired optimization,” Aircraft Engineering and Aerospace Technology, vol. 94, no. 2, pp. 302–314, 2022. doi: 10.1108/AEAT-07-2020-0136
|
| [3] |
Y. Huang, M. Zhu, Z. Zheng, and M. Feroskhan, “Fixed-time autonomous shipboard landing control of a helicopter with external disturbances,” Aerospace Science and Technology, vol. 84, pp. 18–30, 2019. doi: 10.1016/j.ast.2018.07.032
|
| [4] |
B. Gao, Y.-J. Liu, and L. Liu, “Fixed-time neural control of a quadrotor UAV with input and attitude constraints,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 1, pp. 281–283, 2023. doi: 10.1109/JAS.2023.123045
|
| [5] |
H. Ren, H. Ma, H. Li, and Z. Wang, “Adaptive fixed-time control of nonlinear mass with actuator faults,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1252–1262, 2023. doi: 10.1109/JAS.2023.123558
|
| [6] |
H. Ren, Z. Cheng, J. Qin, and R. Lu, “Deception attacks on event-triggered distributed consensus estimation for nonlinear systems,” Autom., vol. 154, p. 111100, 2023. doi: 10.1016/j.automatica.2023.111100
|
| [7] |
J. Lin, Y. Wang, Z. Miao, H. Zhong, and R. Fierro, “Low-complexity control for vision-based landing of quadrotor UAV on unknown moving platform,” IEEE Trans. Industrial Informatics, vol. 18, no. 8, pp. 5348–5358, 2021.
|
| [8] |
K. Xia, S.-M. Lee, W. Chung, Y. Zou, and H. Son, “Moving target landing of a quadrotor using robust optimal guaranteed cost control,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 819–821, 2023. doi: 10.1109/JAS.2023.123108
|
| [9] |
Y. Meng, W. Wang, H. Han, and J. Ban, “A visual/inertial integrated landing guidance method for UAV landing on the ship,” Aerospace Science and Technology, vol. 85, pp. 474–480, 2019. doi: 10.1016/j.ast.2018.12.030
|
| [10] |
Y. Meng, W. Wang, H. Han, and M. Zhang, “A vision/radar/ins integrated guidance method for shipboard landing,” IEEE Trans. Industrial Electronics, vol. 66, no. 11, pp. 8803–8810, 2019. doi: 10.1109/TIE.2019.2891465
|
| [11] |
F. Pakro and A. A. Nikkhah, “A vision-aided fuzzy adaptive sliding mode controller for autonomous landing of a nonlinear model helicopter on a moving marine platform,” Aircraft Engineering and Aerospace Technology, vol. 94, no. 10, pp. 1792–1805, 2022. doi: 10.1108/AEAT-10-2021-0301
|
| [12] |
H.-T. Zhang, B.-B. Hu, Z. Xu, Z. Cai, B. Liu, X. Wang, T. Geng, S. Zhong, and J. Zhao, “Visual navigation and landing control of an unmanned aerial vehicle on a moving autonomous surface vehicle via adaptive learning,” IEEE Trans. Neural Networks and Learning Systems, vol. 32, no. 12, pp. 5345–5355, 2021. doi: 10.1109/TNNLS.2021.3080980
|
| [13] |
Y. Yuan, X. Xu, H. Duan, Z. Zeng, D. Xu, R. Chen, and T. Wu, “Eagle vision-based coordinate landing control framework of unmanned aerial vehicles on an unmanned surface vehicle,” Guidance,Navigation and Control, vol. 2, no. 4, p. 2250023, 2022. doi: 10.1142/S2737480722500236
|
| [14] |
E. Hermand, T. W. Nguyen, M. Hosseinzadeh, and E. Garone, “Constrained control of UAVs in geofencing applications,” in Proc. 26th IEEE Mediterranean Conf. Control and Automation, 2018, pp. 217–222.
|
| [15] |
T. Ma and S. Wong, “Trajectory tracking control of quadrotor UAV,” in Proc. IEEE Int. Conf. Robotics and Biomimetics, 2017, pp. 1751–1756.
|
| [16] |
M. Idres, O. Mustapha, and M. Okasha, “Quadrotor trajectory tracking using PID cascade control,” in Proc. IOP Conf. Series: Materials Science and Engineering, 2017, vol. 270, no. 1, p. 12010.
|
| [17] |
H. Shin, D. You, and D. H. Shim, “Autonomous shipboard landing algorithm for unmanned helicopters in crosswind,” J. Intelligent &Robotic Systems, vol. 74, pp. 347–361, 2014.
|
| [18] |
C. Tan, J. Wang, Y. Paw, and F. Liao, “Autonomous ship deck landing of a quadrotor using invariant ellipsoid method,” IEEE Trans. Aerospace and Electronic Systems, vol. 52, no. 2, pp. 891–903, 2016. doi: 10.1109/TAES.2015.140850
|
| [19] |
Y. Huang, Z. Zheng, L. Sun, and M. Zhu, “Saturated adaptive sliding mode control for autonomous vessel landing of a quadrotor,” IET Control Theory &Applications, vol. 12, no. 13, pp. 1830–1842, 2018.
|
| [20] |
Y. Huang, M. Zhu, L. Sun, Z. Zheng, and C. Jin, “Adaptive backstepping control for autonomous shipboard landing of a quadrotor with input saturation,” Asian J. Control, vol. 23, no. 4, pp. 1693–1706, 2021. doi: 10.1002/asjc.2326
|
| [21] |
L. Sun, Y. Huang, Z. Zheng, B. Zhu, and J. Jiang, “Adaptive nonlinear relative motion control of quadrotors in autonomous shipboard landings,” J. Franklin Institute, vol. 357, no. 18, pp. 13569–13592, 2020. doi: 10.1016/j.jfranklin.2020.10.014
|
| [22] |
Y. Huang, M. Zhu, and Z. Zheng, “Output-constrained fixed-time control for autonomous ship landing of helicopters,” ISA Transa., vol. 106, pp. 221–232, 2020. doi: 10.1016/j.isatra.2020.07.008
|
| [23] |
Y. Yuan and D. Haibin, “Adaptive learning control for a quadrotor unmanned aerial vehicle landing on a moving ship,” IEEE Trans. Industrial Informatics, vol. 20, no. 1, pp. 534–545, 2024. doi: 10.1109/TII.2023.3268439
|
| [24] |
C. P. Bechlioulis and G. A. Rovithakis, “Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance,” IEEE Trans. Autom. Control, vol. 53, no. 9, pp. 2090–2099, 2008. doi: 10.1109/TAC.2008.929402
|
| [25] |
Z. Guan, Y. Ma, and Z. Zheng, “Moving path following with prescribed performance and its application on automatic carrier landing,” IEEE Trans. Aerospace and Electronic Systems, vol. 56, no. 4, pp. 2576–2590, 2019.
|
| [26] |
S. Wang, J. Na, and Q. Chen, “Adaptive predefined performance sliding mode control of motor driving systems with disturbances,” IEEE Trans. Energy Conversion, vol. 36, no. 3, pp. 1931–1939, 2020.
|
| [27] |
Y. Sun, J. Liu, Y. Gao, Z. Liu, and Y. Zhao, “Adaptive neural tracking control for manipulators with prescribed performance under input saturation,” IEEE/ASME Trans. Mechatronics, vol. 28, no. 2, pp. 1037–1046, 2022.
|
| [28] |
Z. Kang, Q. Shen, S. Wu, and C. J. Damaren, “Prescribed performance-based fixed-time adaptive control allocation for overactuated spacecraft,” J. Guidance,Control,and Dynamics, vol. 46, no. 2, pp. 390–400, 2023. doi: 10.2514/1.G006915
|
| [29] |
H. Sun, G. Zong, J. Cui, and K. Shi, “Fixed-time sliding mode output feedback tracking control for autonomous underwater vehicle with prescribed performance constraint,” Ocean Engineering, vol. 247, p. 110673, 2022. doi: 10.1016/j.oceaneng.2022.110673
|
| [30] |
G. Chen, D. Yao, Q. Zhou, H. Li, and R. Lu, “Distributed event-triggered formation control of USVs with prescribed performance,” J. Systems Science and Complexity, vol. 35, pp. 820–838, 2022. doi: 10.1007/s11424-021-0150-0
|
| [31] |
X. Bu, B. Jiang, and H. Lei, “Nonfragile quantitative prescribed performance control of waverider vehicles with actuator saturation,” IEEE Trans. Aerospace and Electronic Systems, vol. 58, no. 4, pp. 3538–3548, 2022. doi: 10.1109/TAES.2022.3153429
|
| [32] |
R. Ji, B. Yang, J. Ma, and S. S. Ge, “Saturation-tolerant prescribed control for a class of MIMO nonlinear systems,” IEEE Trans. Cyber., vol. 52, no. 12, pp. 13012–13026, 2021.
|
| [33] |
P. R. Mohanty and A. K. Panda, “A nonlinear control scheme based on dynamic evolution path theory for improved dynamic performance of boost PFC converter working on nonlinear features,” ISA Trans., vol. 65, pp. 254–261, 2016. doi: 10.1016/j.isatra.2016.06.018
|
| [34] |
X. Bu, C. Hua, M. Lv, and Z. Wu, “Flight control of waverider vehicles with fragility-avoidance prescribed performance,” IEEE Trans. Aerospace and Electronic Systems, vol. 59, no. 5, pp. 5248–5261, 2023. doi: 10.1109/TAES.2023.3251314
|
| [35] |
Q. Lu, B. Ren, and S. Parameswaran, “Shipboard landing control enabled by an uncertainty and disturbance estimator,” J. Guidance,Control,and Dynamics, vol. 41, no. 7, pp. 1502–1520, 2018. doi: 10.2514/1.G003073
|
| [36] |
P. Yang and Y. Su, “Proximate fixed-time prescribed performance tracking control of uncertain robot manipulators,” IEEE/ASME Trans. Mechatronics, vol. 27, no. 5, pp. 3275–3285, 2021.
|
| [37] |
D. Swaroop, J. K. Hedrick, P. P. Yip, and J. C. Gerdes, “Dynamic surface control for a class of nonlinear systems,” IEEE Trans. Autom. Control, vol. 45, no. 10, pp. 1893–1899, 2000. doi: 10.1109/TAC.2000.880994
|
| [38] |
Z. Yu, Y. Qu, and Y. Zhang, “Distributed fault-tolerant cooperative control for multi-uavs under actuator fault and input saturation,” IEEE Trans. Control Systems Technology, vol. 27, no. 6, pp. 2417–2429, 2018.
|
Figures(10)






 DownLoad:
DownLoad: