A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 5
Volume 11
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | Z. Chen, S. Zhou, C. Shen, L. Lyu, J. Zhang, and B. Yao, “Observer-based adaptive robust precision motion control of a multi-joint hydraulic manipulator,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 5, pp. 1213–1226, May 2024. doi: 10.1109/JAS.2024.124209

|
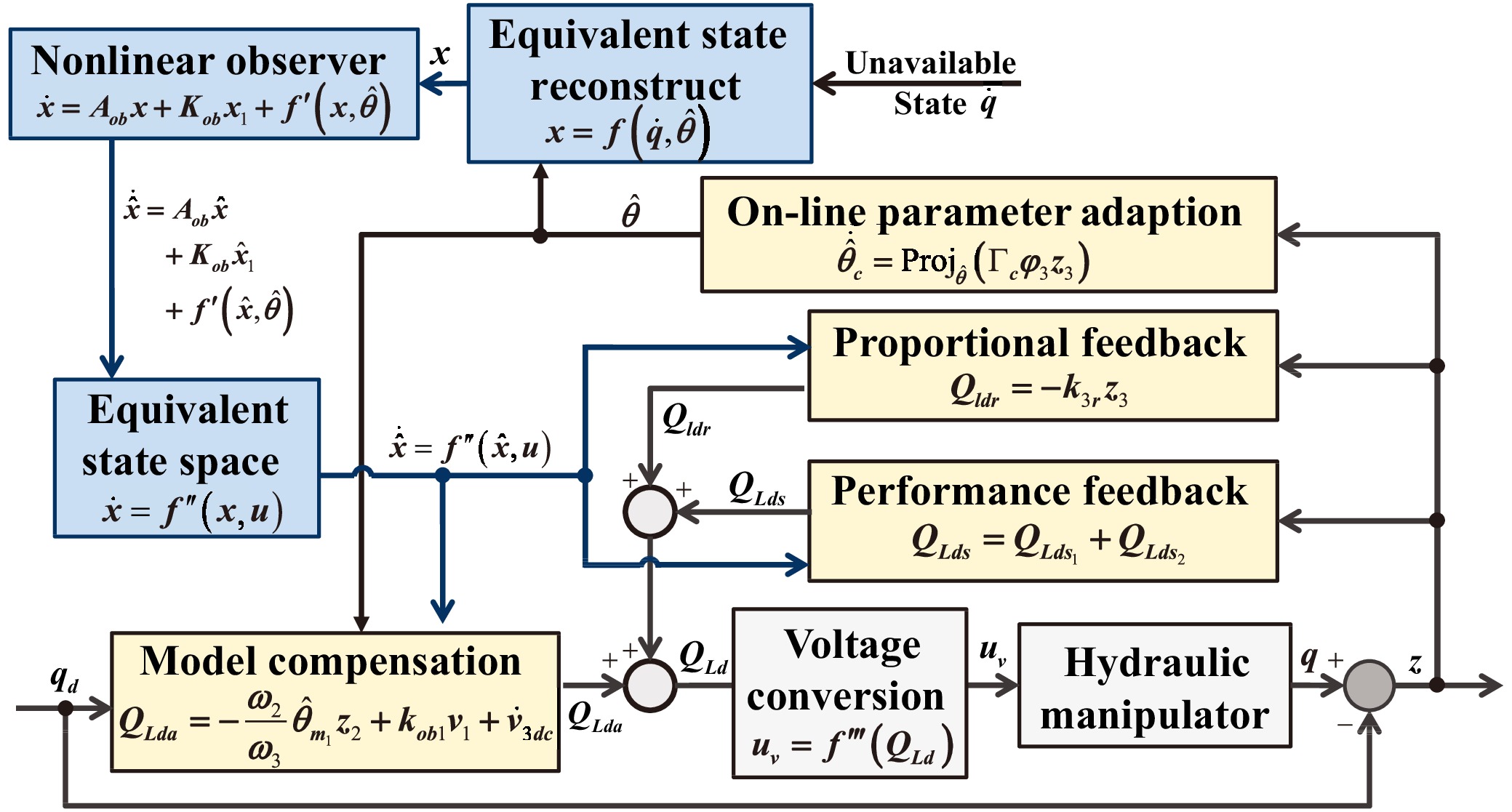
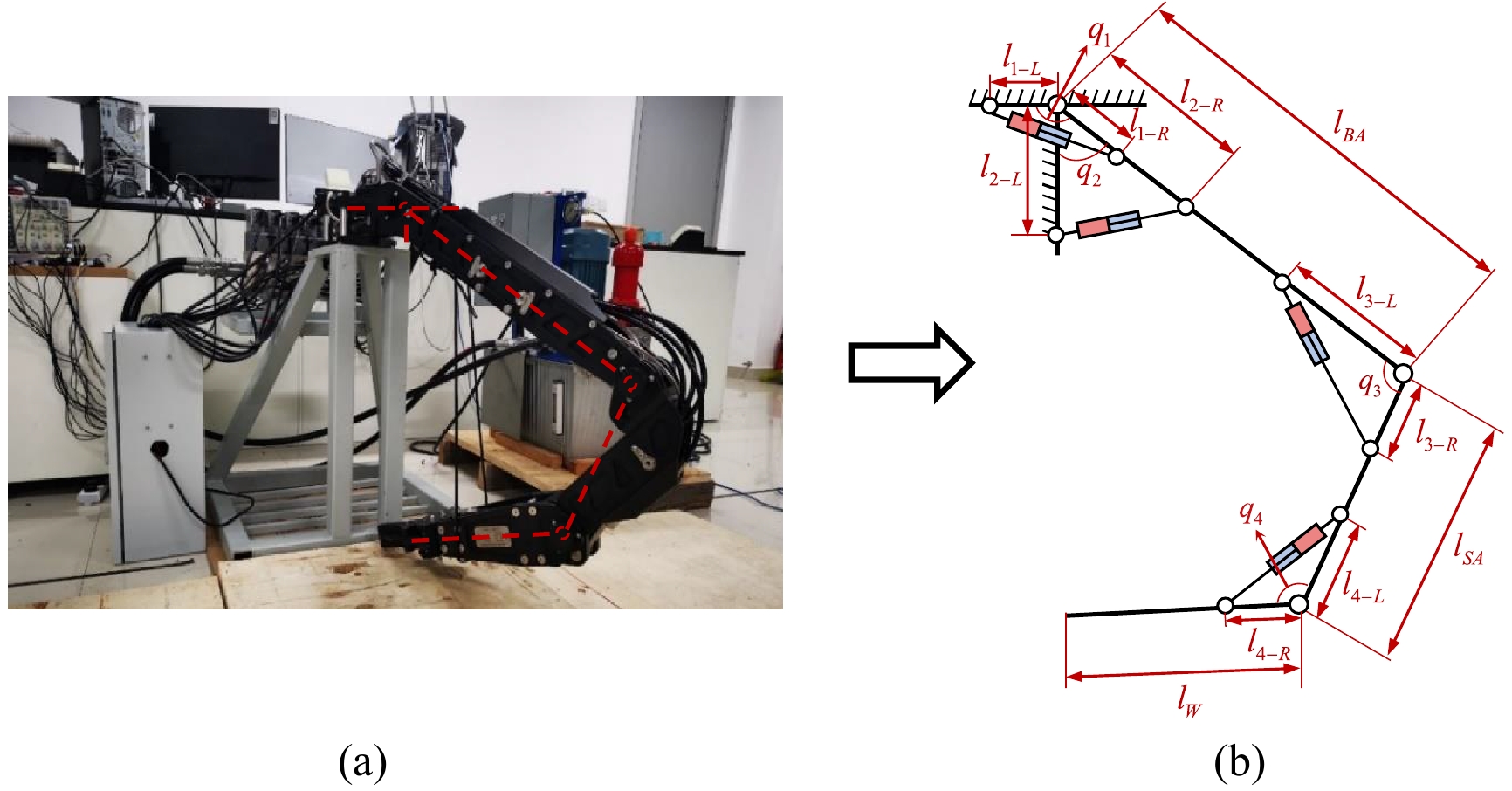
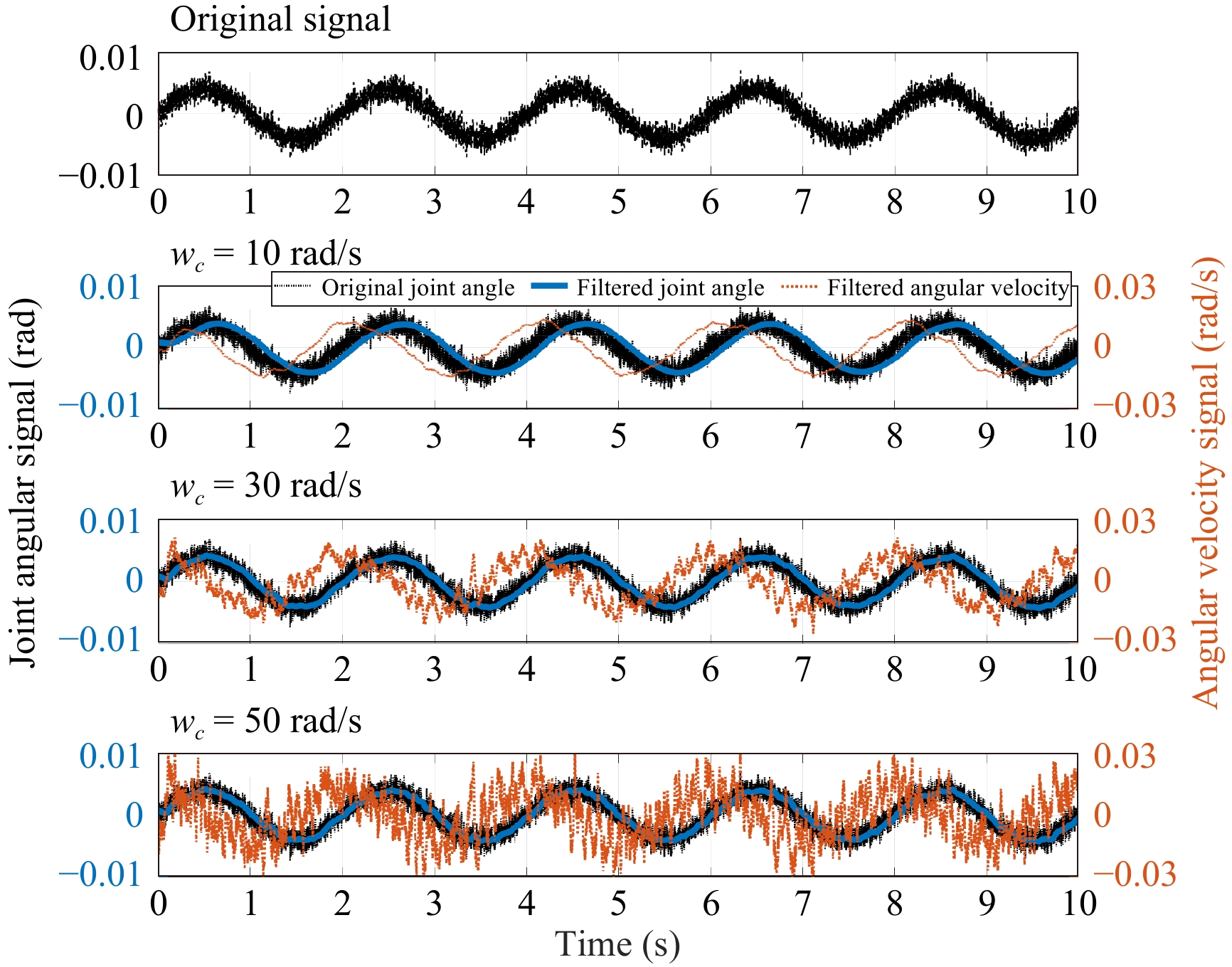
Hydraulic manipulators are usually applied in heavy-load and harsh operation tasks. However, when faced with a complex operation, the traditional proportional-integral-derivative (PID) control may not meet requirements for high control performance. Model-based full-state-feedback control is an effective alternative, but the states of a hydraulic manipulator are not always available and reliable in practical applications, particularly the joint angular velocity measurement. Considering that it is not suitable to obtain the velocity signal directly from differentiating of position measurement, the low-pass filtering is commonly used, but it will definitely restrict the closed-loop bandwidth of the whole system. To avoid this problem and realize better control performance, this paper proposes a novel observer-based adaptive robust controller (obARC) for a multi-joint hydraulic manipulator subjected to both parametric uncertainties and the lack of accurate velocity measurement. Specifically, a nonlinear adaptive observer is first designed to handle the lack of velocity measurement with the consideration of parametric uncertainties. Then, the adaptive robust control is developed to compensate for the dynamic uncertainties, and the close-loop system robust stability is theoretically proved under the observation and control errors. Finally, comparative experiments are carried out to show that the designed controller can achieve a performance improvement over the traditional methods, specifically yielding better control accuracy owing to the closed-loop bandwidth breakthrough, which is limited by low-pass filtering in full-state-feedback control.

| [1] |
Y. Yang, J. Tan, and D. Yue, “Prescribed performance control of one-dof link manipulator with uncertainties and input saturation constraint,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 148–157, 2018.
|
| [2] |
W. Chang, Y. Li, and S. Tong, “Adaptive fuzzy backstepping tracking control for flexible robotic manipulator,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 12, pp. 1923–1930, 2021. doi: 10.1109/JAS.2017.7510886
|
| [3] |
S. K. Pradhan and B. Subudhi, “Position control of a flexible manipulator using a new nonlinear self-tuning PID controller,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 136–149, 2018.
|
| [4] |
M. Bolignari, G. Rizzello, L. Zaccarian, and M. Fontana, “Lightweight human-friendly robotic arm based on transparent hydrostatic transmissions,” IEEE Trans. Robotics, vol. 39, no. 5, pp. 4051–4064, 2023. doi: 10.1109/TRO.2023.3290310
|
| [5] |
B. Helian, Z. Chen, and B. Yao, “Constrained motion control of an electro-hydraulic actuator under multiple time-varying constraints,” IEEE Trans. Industrial Informatics, pp. 1–11, 2023.
|
| [6] |
S. Sivčev, J. Coleman, E. Omerdić, and D. Toal, “Underwater manipulators: A review,” Ocean Engineering, vol. 163, pp. 431–450, 2018. doi: 10.1016/j.oceaneng.2018.06.018
|
| [7] |
Y. Sun, Y. Wan, H. Ma, and X. Liang, “Real-time force control of hydraulic manipulator arms without force or pressure feedback using a nonlinear algorithm,” IEEE Robotics and Autom. Letters, vol. 8, no. 11, pp. 7146–7153, 2023. doi: 10.1109/LRA.2023.3293748
|
| [8] |
J. Mattila, J. Koivumki, D. G. Caldwell, and C. Semini, “A survey on control of hydraulic robotic manipulators with projection to future trends,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 2, pp. 669–680, 2017. doi: 10.1109/TMECH.2017.2668604
|
| [9] |
T. Lin, Y. Lin, H. Ren, H. Chen, Z. Li, and Q. Chen, “A double variable control load sensing system for electric hydraulic excavator,” Energy, vol. 223, p. 119999, 2021. doi: 10.1016/j.energy.2021.119999
|
| [10] |
K.-X. Ba, Y.-H. Song, C.-Y. Wang, Y.-P. Shi, B. Yu, X. Chen, G.-L. Ma, and X.-D. Kong, “A novel kinematics and statics correction algorithm of semi-cylindrical foot end structure for 3-DOF LHDS of legged robots,” Complex and Intelligent Systems, pp. 1–21, 2022.
|
| [11] |
L. Lyu, Z. Chen, and B. Yao, “Advanced valves and pump coordinated hydraulic control design to simultaneously achieve high accuracy and high efficiency,” IEEE Trans. Control Systems Technology, pp. 1–13, 2020.
|
| [12] |
W. Shen and J. Wang, “An integral terminal sliding mode control scheme for speed control system using a double-variable hydraulic transformer,” ISA Trans., vol. 124, pp. 386–394, 2022. doi: 10.1016/j.isatra.2019.08.068
|
| [13] |
S. Mohan and J. Kim, “Robust PID control for position tracking of an underwater manipulator,” in Proc. IEEE Int. Conf. Advanced Intelligent Mechatronics, 2015, pp. 1707–1712.
|
| [14] |
S. Zhou, C. Shen, Y. Xia, Z. Chen, and S. Zhu, “Adaptive robust control design for underwater multi-DOF hydraulic manipulator,” Ocean Engineering, vol. 248, p. 110822, 2022. doi: 10.1016/j.oceaneng.2022.110822
|
| [15] |
J. Yao, W. Deng, and Z. Jiao, “Rise-based adaptive control of hydraulic systems with asymptotic tracking,” IEEE Trans. Autom. Science and Engineering, pp. 1–8, 2015.
|
| [16] |
W. Deng and J. Yao, “Asymptotic tracking control of mechanical servosystems with mismatched uncertainties,” IEEE/ASME Trans. Mechatronics, vol. 26, no. 4, pp. 2204–2214, 2020.
|
| [17] |
J. Yao and W. Deng, “Active disturbance rejection adaptive control of hydraulic servo systems,” IEEE Trans. Industrial Electronics, vol. 64, no. 10, pp. 8023–8032, 2017. doi: 10.1109/TIE.2017.2694382
|
| [18] |
Z. Yao, J. Yao, and W. Sun, “Adaptive rise control of hydraulic systems with multilayer neural-networks,” IEEE Trans. Industrial Electronics, vol. 66, no. 11, pp. 8638–8647, 2018.
|
| [19] |
X. Yang, W. Deng, and J. Yao, “Neural adaptive dynamic surface asymptotic tracking control of hydraulic manipulators with guaranteed transient performance,” IEEE Trans. Neural Networks and Learning Systems, 2022.
|
| [20] |
L. Lyu, Z. Chen, and B. Yao, “Development of pump and valves combined hydraulic system for both high tracking precision and high energy efficiency,” IEEE Trans. Industrial Electronics, vol. 66, no. 9, pp. 7189–7198, 2018.
|
| [21] |
X. Liu, Z. Chen, Y. Liu, F. Duan, C. Yang, and B. Yao, “Direct optimization based compensation adaptive robust control of nonlinear systems with state and input constraints,” IEEE Trans. Industrial Informatics, vol. 17, no. 8, pp. 5441–5449, 2021. doi: 10.1109/TII.2020.3032424
|
| [22] |
J. Hu, Z. Chen, X. Ma, H. Lai, and B. Yao, “A telepresence-guaranteed control scheme for teleoperation applications of transferring weight-unknown objects,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 1015–1025, 2022. doi: 10.1109/JAS.2022.105626
|
| [23] |
G. R. Petrović and J. Mattila, “Mathematical modelling and virtual decomposition control of heavy-duty parallel-serial hydraulic manipulators,” Mechanism and Machine Theory, vol. 170, p. 104680, 2022. doi: 10.1016/j.mechmachtheory.2021.104680
|
| [24] |
J. Koivumki and J. Mattila, “Stability-guaranteed force-sensorless contact force/motion control of heavy-duty hydraulic manipulators,” IEEE Trans. Robotics, vol. 31, no. 4, pp. 918–935, 2015. doi: 10.1109/TRO.2015.2441492
|
| [25] |
W. Deng and J. Yao, “Extended-state-observer-based adaptive control of electrohydraulic servomechanisms without velocity measurement,” IEEE/ASME Trans. Mechatronics, vol. 25, no. 3, pp. 1151–1161, 2019.
|
| [26] |
S.-K. Kim and C. K. Ahn, “Angular velocity observer-based quadcopter attitude stabilization via pole-zero cancellation technique,” IEEE Trans. Circuits and Systems II: Express Briefs, vol. 68, no. 7, pp. 2458–2462, 2021.
|
| [27] |
Y. Xia, Y. Nie, Z. Chen, L. Lyu, and P. Hu, “Motion control of a hydraulic manipulator with adaptive nonlinear model compensation and comparative experiments,” Machines, vol. 10, no. 3, 2022.
|
| [28] |
S. Zhou, C. Shen, F. Pang, Z. Chen, J. Gu, and S. Zhu, “Position-based visual servoing control for multi-joint hydraulic manipulator,” J. Intelligent and Robotic Systems, vol. 105, no. 2, pp. 1–22, 2022.
|
| [29] |
J. C. Santos, L. Cuau, P. Poignet, and N. Zemiti, “Decoupled model predictive control for path following on complex surfaces,” IEEE Robotics and Autom. Letters, vol. 8, no. 4, pp. 2046–2053, 2023. doi: 10.1109/LRA.2023.3246393
|
| [30] |
S. Zhou, C. Shen, S. Zhu, W. Li, Y. Nie, and Z. Chen, “A teleoperation framework based on heterogeneous matching for hydraulic manipulator,” Machines, vol. 10, no. 7, 2022.
|
| [31] |
Q. Zhang and D. He, “Disturbance-observer-based adaptive fuzzy control for strict-feedback switched nonlinear systems with input delay,” IEEE Trans. Fuzzy Systems, vol. 29, no. 7, pp. 1942–1952, 2021. doi: 10.1109/TFUZZ.2020.2989265
|
| [32] |
T. Gao, T. Li, Y.-J. Liu, S. Tong, and F. Sun, “Observer-based adaptive fuzzy control of nonstrict feedback nonlinear systems with function constraints,” IEEE Trans. Fuzzy Systems, vol. 31, no. 8, pp. 2556–2567, 2023. doi: 10.1109/TFUZZ.2022.3228319
|
| [33] |
Y. Li, Y. Liu, and S. Tong, “Observer-based neuro-adaptive optimized control of strict-feedback nonlinear systems with state constraints,” IEEE Trans. Neural Networks and Learning Systems, vol. 33, no. 7, pp. 3131–3145, 2022. doi: 10.1109/TNNLS.2021.3051030
|
| [34] |
W. Deng and J. Yao, “Extended-state-observer-based adaptive control of electrohydraulic servomechanisms without velocity measurement,” IEEE/ASME Trans. Mechatronics, vol. 25, no. 3, pp. 1151–1161, 2020. doi: 10.1109/TMECH.2019.2959297
|
| [35] |
D. Won, W. Kim, and M. Tomizuka, “High-gain-observer-based integral sliding mode control for position tracking of electrohydraulic servo systems,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 6, pp. 2695–2704, 2017. doi: 10.1109/TMECH.2017.2764110
|
| [36] |
W. Jie, H.-H. Kim, K. Dad, and M.-C. Lee, “Terminal sliding mode control with sliding perturbation observer for a hydraulic robot manipulator,” IFAC-PapersOnLine, vol. 51, no. 22, pp. 7–12, 2018. doi: 10.1016/j.ifacol.2018.11.510
|
| [37] |
Q. Guo, Y. Zhang, B. G. Celler, and S. W. Su, “Backstepping control of electro-hydraulic system based on extended-state-observer with plant dynamics largely unknown,” IEEE Trans. Industrial Electronics, vol. 63, no. 11, pp. 6909–6920, 2016. doi: 10.1109/TIE.2016.2585080
|
| [38] |
F. Zhang, J. Zhang, M. Cheng, and B. Xu, “A flow-limited rate control scheme for the master-slave hydraulic manipulator,” IEEE Trans. Industrial Electronics, vol. 69, no. 5, pp. 4988–4998, 2022. doi: 10.1109/TIE.2021.3084175
|
| [39] |
L. Xu and B. Yao, “Output feedback adaptive robust precision motion control of linear motors,” Automatica, vol. 37, no. 7, pp. 1029–1039, 2001. doi: 10.1016/S0005-1098(01)00052-8
|
Figures(12) / Tables(3)






 DownLoad:
DownLoad: