A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 7
Volume 11
Issue 7
IEEE/CAA Journal of Automatica Sinica
| Citation: | W. Song, Z. Wang, Z. Li, J. Wang, and Q.-L. Han, “Nonlinear filtering with sample-based approximation under constrained communication: Progress, insights and trends,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 7, pp. 1539–1556, Jul. 2024. doi: 10.1109/JAS.2023.123588

|
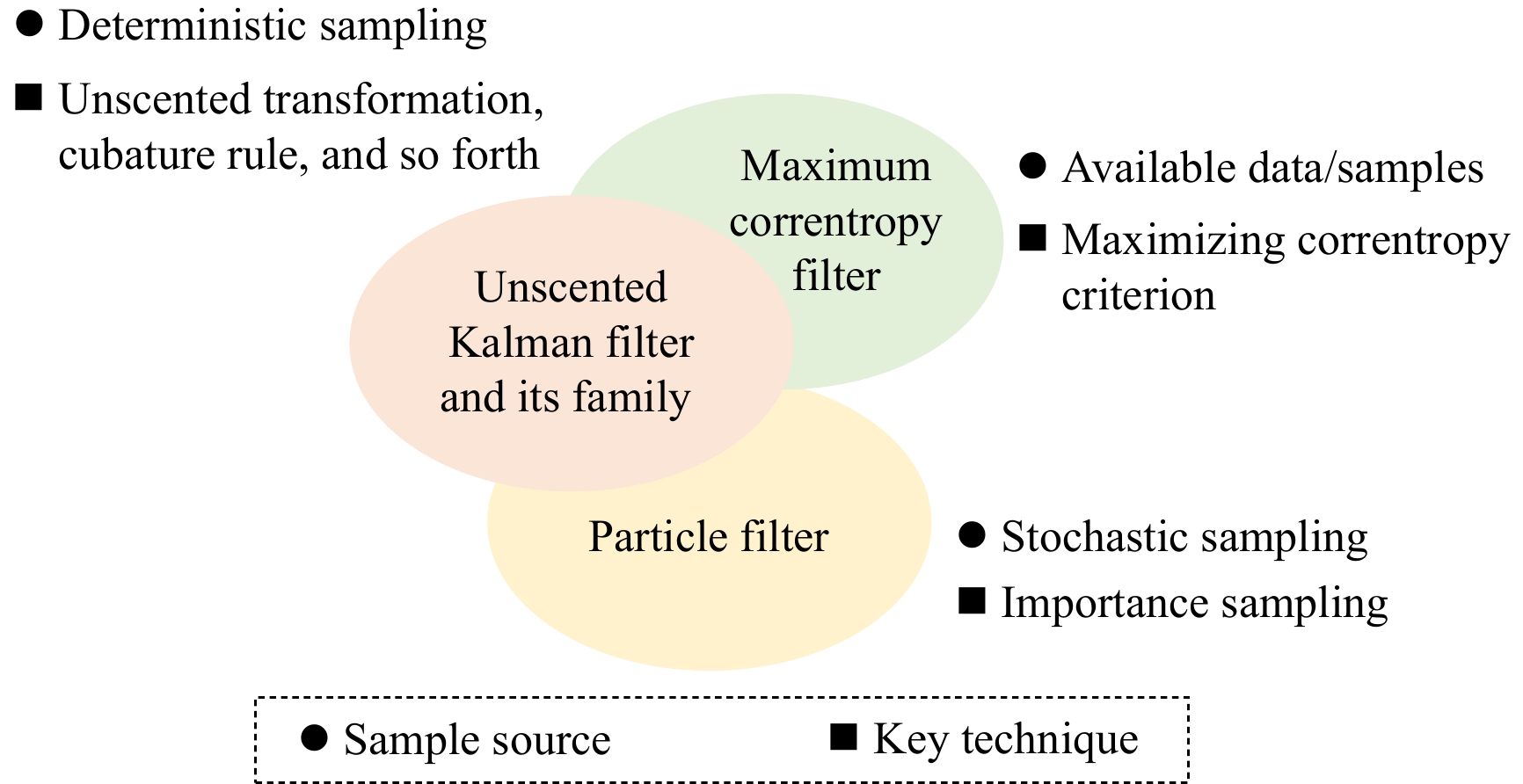
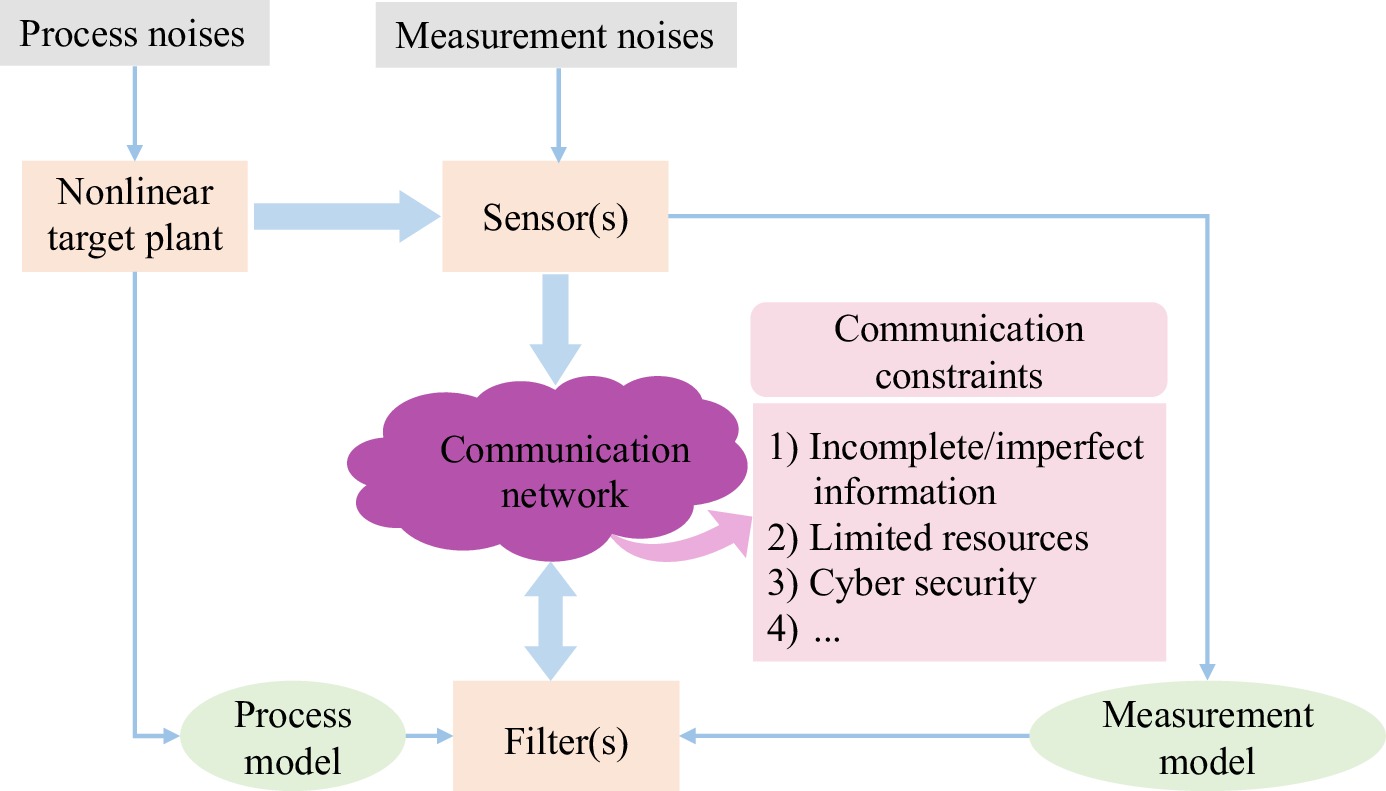
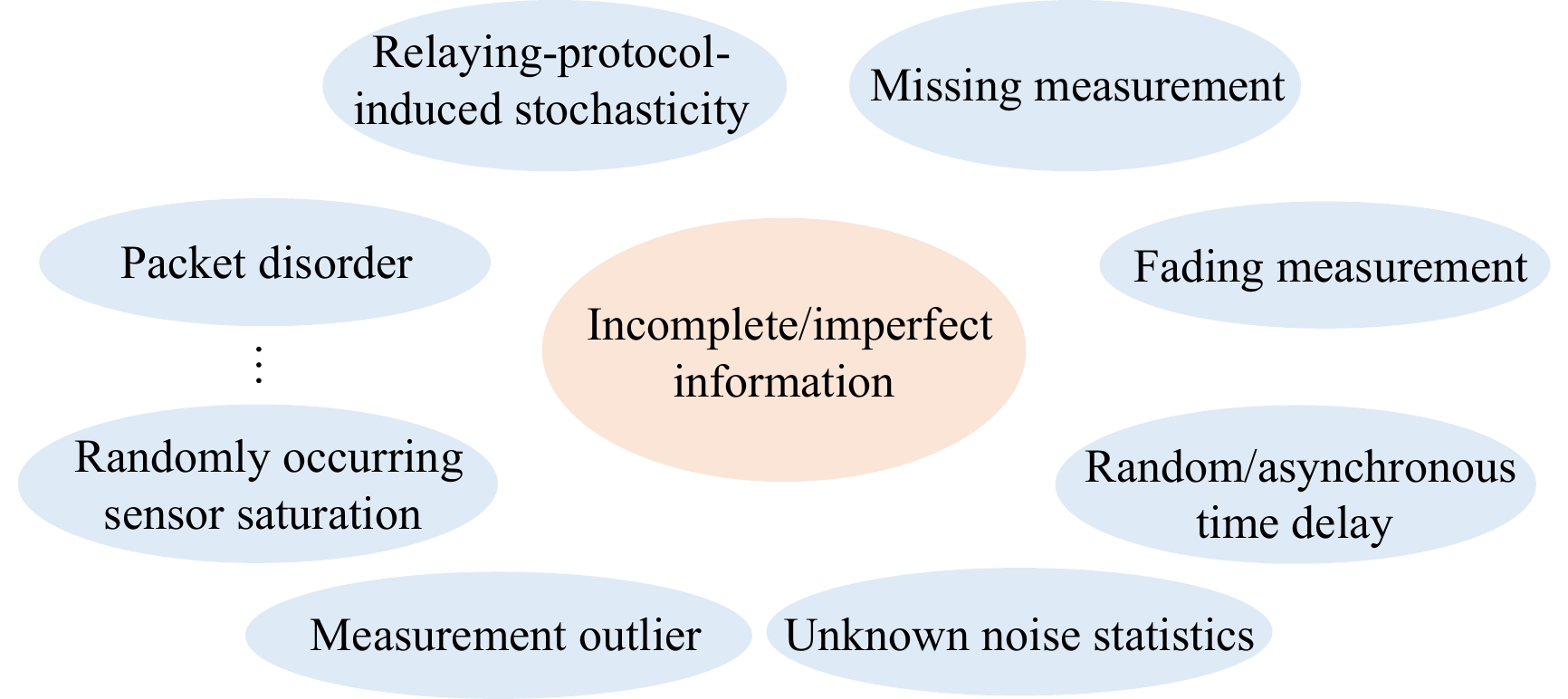
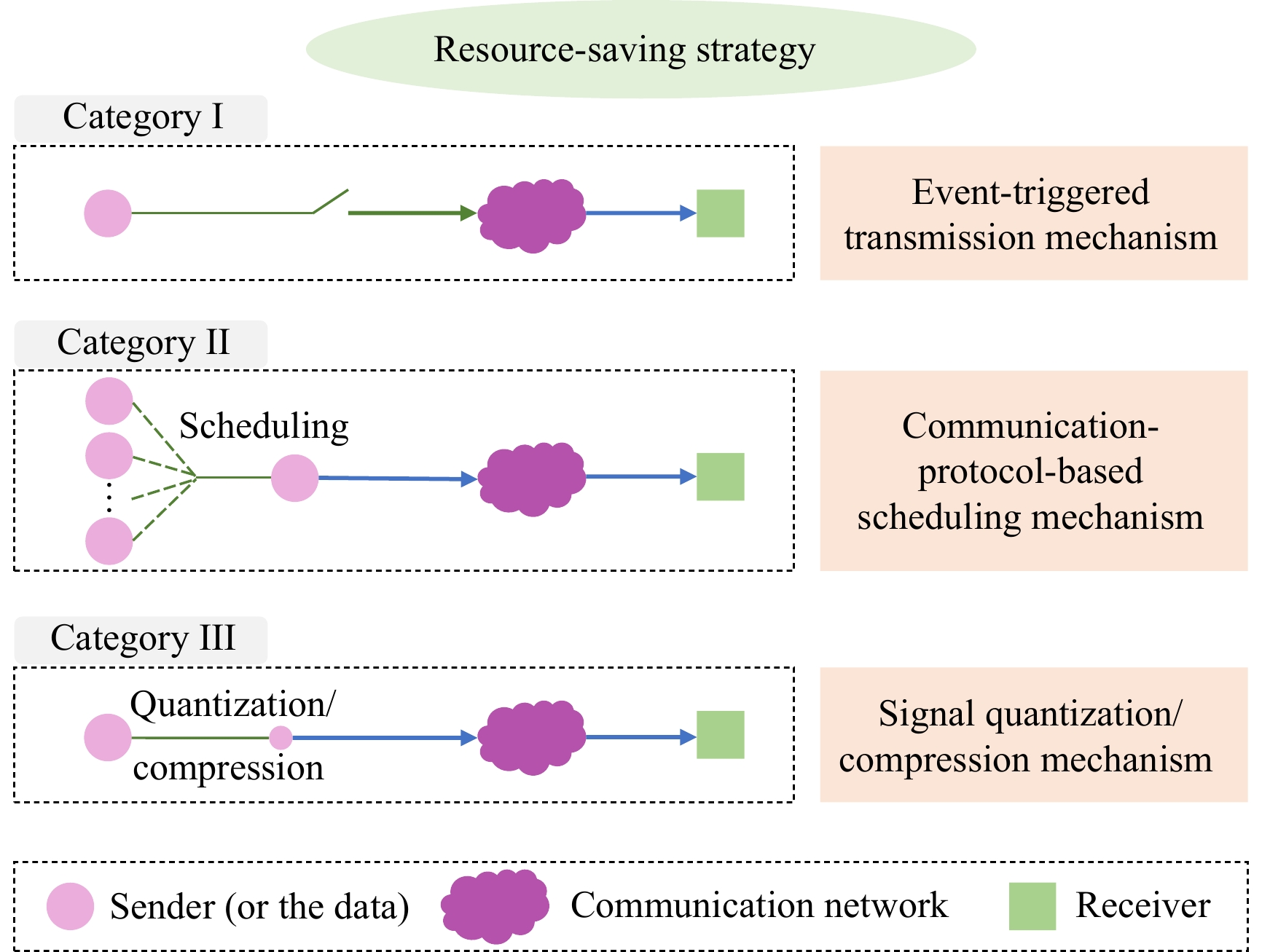
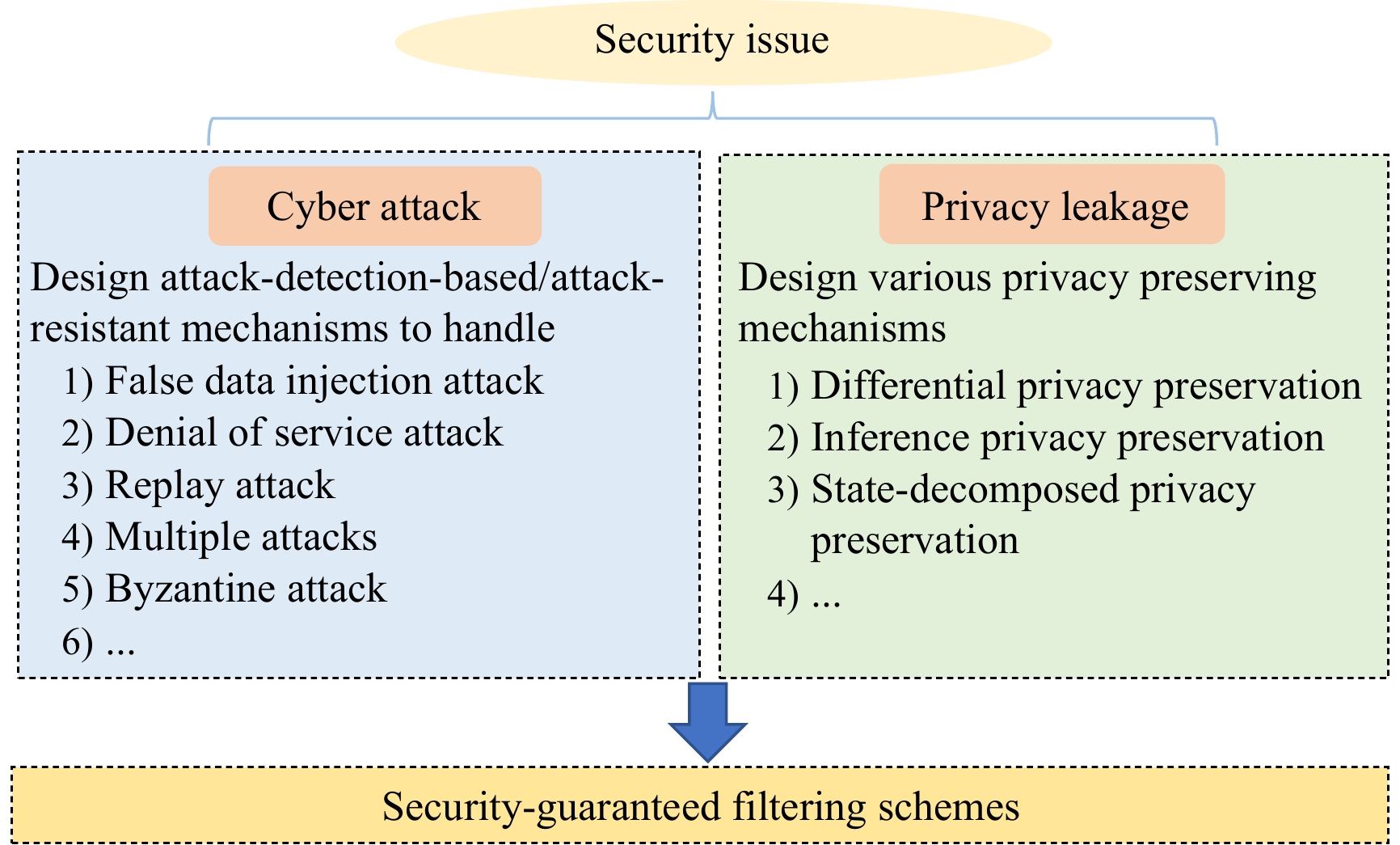
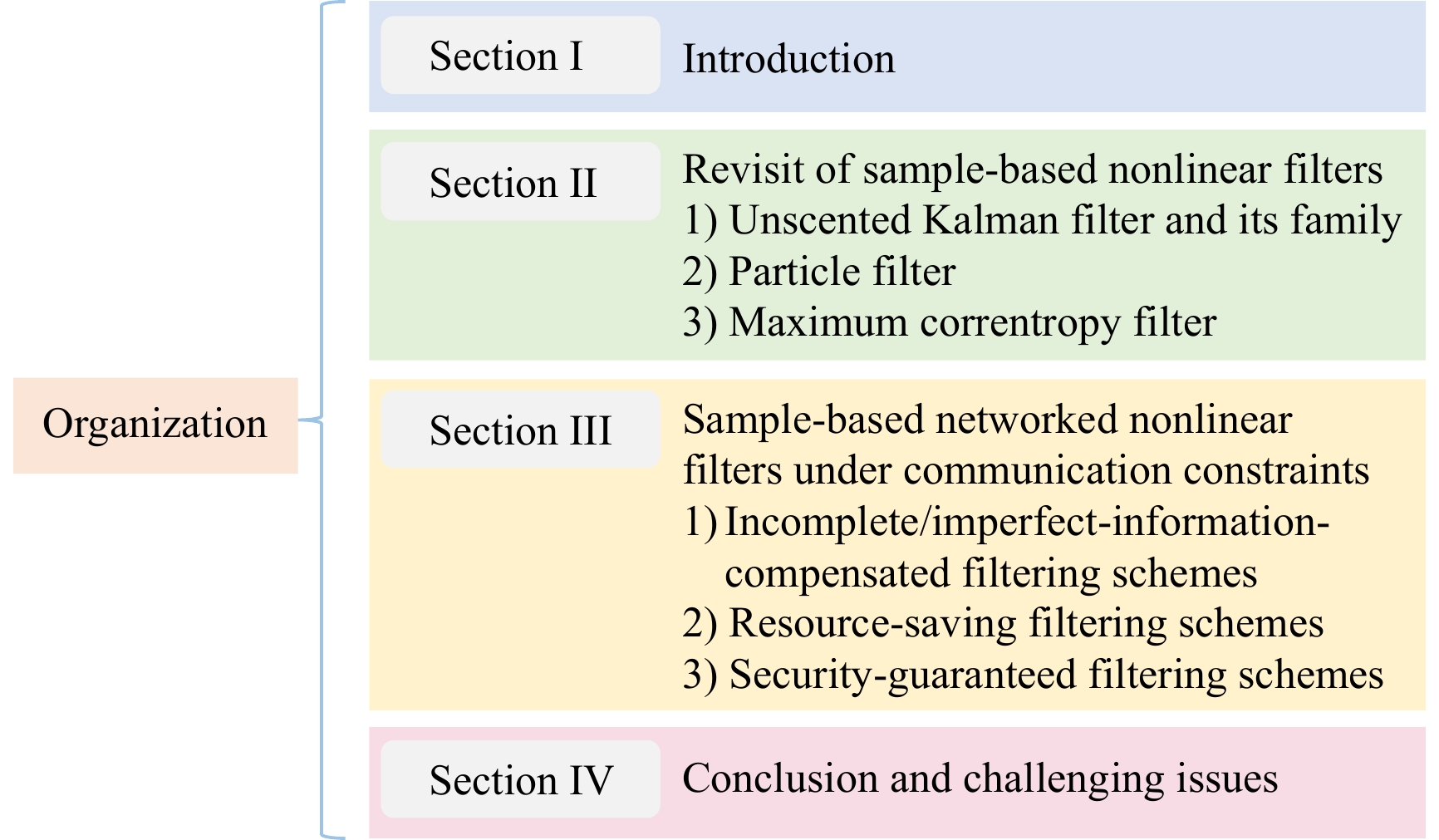
The nonlinear filtering problem has enduringly been an active research topic in both academia and industry due to its ever-growing theoretical importance and practical significance. The main objective of nonlinear filtering is to infer the states of a nonlinear dynamical system of interest based on the available noisy measurements. In recent years, the advance of network communication technology has not only popularized the networked systems with apparent advantages in terms of installation, cost and maintenance, but also brought about a series of challenges to the design of nonlinear filtering algorithms, among which the communication constraint has been recognized as a dominating concern. In this context, a great number of investigations have been launched towards the networked nonlinear filtering problem with communication constraints, and many sample-based nonlinear filters have been developed to deal with the highly nonlinear and/or non-Gaussian scenarios. The aim of this paper is to provide a timely survey about the recent advances on the sample-based networked nonlinear filtering problem from the perspective of communication constraints. More specifically, we first review three important families of sample-based filtering methods known as the unscented Kalman filter, particle filter, and maximum correntropy filter. Then, the latest developments are surveyed with stress on the topics regarding incomplete/imperfect information, limited resources and cyber security. Finally, several challenges and open problems are highlighted to shed some lights on the possible trends of future research in this realm.

| [1] |
A. Bain and D. Crisan, Fundamentals of Stochastic Filtering. New York, USA: Springer, 2009.
|
| [2] |
Y. Huang, Y. Zhang, P. Shi, Z. Wu, J. Qian, and J. A. Chambers, “Robust Kalman filters based on Gaussian scale mixture distributions with application to target tracking,” IEEE Trans. Syst. Man Cybern. Syst., vol. 49, no. 10, pp. 2082–2096, Oct. 2019. doi: 10.1109/TSMC.2017.2778269
|
| [3] |
P. Milanfar, “A tour of modern image filtering: New insights and methods, both practical and theoretical,” IEEE Signal Process. Mag., vol. 30, no. 1, pp. 106–128, Jan. 2013. doi: 10.1109/MSP.2011.2179329
|
| [4] |
W. Rohm, K. Zhang, and J. Bosy, “Limited constraint, robust Kalman filtering for GNSS troposphere tomography,” Atmos. Meas. Tech., vol. 7, no. 5, pp. 1475–1486, May 2014. doi: 10.5194/amt-7-1475-2014
|
| [5] |
X. Li, S. Feng, N. Hou, R. Wang, H. Li, M. Gao, and S. Li, “Surface microseismic data denoising based on sparse autoencoder and Kalman filter,” Syst. Sci. Control Eng., vol. 10, no. 1, pp. 616–628, Jun. 2022. doi: 10.1080/21642583.2022.2087786
|
| [6] |
S. Kanna, D. H. Dini, Y. Xia, S. Y. Hui, and D. P. Mandic, “Distributed widely linear Kalman filtering for frequency estimation in power networks,” IEEE Trans. Signal Inf. Process. Netw., vol. 1, no. 1, pp. 45–57, Mar. 2015.
|
| [7] |
B. Azimi-Sadjadi and P. S. Krishnaprasad, “Approximate nonlinear filtering and its application in navigation,” Automatica, vol. 41, no. 6, pp. 945–956, Jun. 2005. doi: 10.1016/j.automatica.2004.12.013
|
| [8] |
R. E. Kalman, “A new approach to linear filtering and prediction problems,” J. Basic Eng., vol. 82, no. 1, pp. 35–45, Mar. 1960. doi: 10.1115/1.3662552
|
| [9] |
K. Reif, S. Günther, E. Yaz, and R. Unbehauen, “Stochastic stability of the discrete-time extended Kalman filter,” IEEE Trans. Autom. Control, vol. 44, no. 4, pp. 714–728, Apr. 1999. doi: 10.1109/9.754809
|
| [10] |
S. J. Julier and J. K. Uhlmann, “Unscented filtering and nonlinear estimation,” Proc. IEEE, vol. 92, no. 3, pp. 401–422, Mar. 2004. doi: 10.1109/JPROC.2003.823141
|
| [11] |
I. Arasaratnam and S. Haykin, “Cubature Kalman filters,” IEEE Trans. Autom. Control, vol. 54, no. 6, pp. 1254–1269, Jun. 2009. doi: 10.1109/TAC.2009.2019800
|
| [12] |
B. Jia, M. Xin, and Y. Cheng, “Sparse-grid quadrature nonlinear filtering,” Automatica, vol. 48, no. 2, pp. 327–341, Feb. 2012. doi: 10.1016/j.automatica.2011.08.057
|
| [13] |
I. Bilik and J. Tabrikian, “Maneuvering target tracking in the presence of glint using the nonlinear Gaussian mixture Kalman filter,” IEEE Trans. Aerosp. Electron. Syst., vol. 46, no. 1, pp. 246–262, Jan. 2010. doi: 10.1109/TAES.2010.5417160
|
| [14] |
J. Wang, J. Li, S. Yan, W. Shi, X. Yang, Y. Guo, and T. A. Gulliver, “A novel underwater acoustic signal denoising algorithm for Gaussian/non-Gaussian impulsive noise,” IEEE Trans. Veh. Technol., vol. 70, no. 1, pp. 429–445, Jan. 2021. doi: 10.1109/TVT.2020.3044994
|
| [15] |
Q. Zhang and Y. Zhou, “Recent advances in non-Gaussian stochastic systems control theory and its applications,” Int. J. Netw. Dyn. Intell., vol. 1, no. 1, pp. 111–119, Dec. 2022.
|
| [16] |
A. M. Zoubir, V. Koivunen, Y. Chakhchoukh, and M. Muma, “Robust estimation in signal processing: A tutorial-style treatment of fundamental concepts,” IEEE Signal Process. Mag., vol. 29, no. 4, pp. 61–80, Jul. 2012. doi: 10.1109/MSP.2012.2183773
|
| [17] |
J. Duník, S. K. Biswas, A. G. Dempster, T. Pany, and P. Closas, “State estimation methods in navigation: Overview and application,” IEEE Aerosp. Electron. Syst. Mag., vol. 35, no. 12, pp. 16–31, Dec. 2020. doi: 10.1109/MAES.2020.3002001
|
| [18] |
D. L. Alspach and H. W. Sorenson, “Nonlinear Bayesian estimation using Gaussian sum approximations,” IEEE Trans. Autom. Control, vol. 17, no. 4, pp. 439–448, Aug. 1972. doi: 10.1109/TAC.1972.1100034
|
| [19] |
A. K. Singh, “Major development under Gaussian filtering since unscented Kalman filter,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1308–1325, Sept. 2020.
|
| [20] |
I. Arasaratnam, S. Haykin, and R. J. Elliott, “Discrete-time nonlinear filtering algorithms using Gauss-Hermite quadrature,” Proc. IEEE, vol. 95, no. 5, pp. 953–977, May 2007. doi: 10.1109/JPROC.2007.894705
|
| [21] |
M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking,” IEEE Trans. Signal Process., vol. 50, no. 2, pp. 174–188, Feb. 2002. doi: 10.1109/78.978374
|
| [22] |
J. Li and A. Nehorai, “Distributed particle filtering via optimal fusion of Gaussian mixtures,” IEEE Trans. Signal Inf. Process. Netw., vol. 4, no. 2, pp. 280–292, Jun. 2018.
|
| [23] |
L. Martino, V. Elvira, and G. Camps-Valls, “Group importance sampling for particle filtering and MCMC,” Digital Signal Process., vol. 82, pp. 133–151, Nov. 2018. doi: 10.1016/j.dsp.2018.07.007
|
| [24] |
W. Song, Z. Wang, J. Wang, F. E. Alsaadi, and J. Y. Shan, “Particle filtering for nonlinear/non-Gaussian systems with energy harvesting sensors subject to randomly occurring sensor saturations,” IEEE Trans. Signal Process., vol. 69, pp. 15–27, 2021. doi: 10.1109/TSP.2020.3042951
|
| [25] |
D. Crisan and A. Doucet, “A survey of convergence results on particle filtering methods for practitioners,” IEEE Trans. Signal Process., vol. 50, no. 3, pp. 736–746, Mar. 2002. doi: 10.1109/78.984773
|
| [26] |
B. Chen, X. Liu, H. Zhao, and J. C. Principe, “Maximum correntropy Kalman filter,” Automatica, vol. 76, pp. 70–77, Feb. 2017. doi: 10.1016/j.automatica.2016.10.004
|
| [27] |
R. Izanloo, S. A. Fakoorian, H. S. Yazdi, and D. Simon, “Kalman filtering based on the maximum correntropy criterion in the presence of non-Gaussian noise,” in Proc. Annu. Conf. Information Science and Systems, Princeton, USA, 2016, pp. 500-505.
|
| [28] |
W. Liu, P. P. Pokharel, and J. C. Principe, “Correntropy: Properties and applications in non-Gaussian signal processing,” IEEE Trans. Signal Process., vol. 55, no. 11, pp. 5286–5298, Nov. 2007. doi: 10.1109/TSP.2007.896065
|
| [29] |
X. Liu, Z. Ren, H. Lyu, Z. Jiang, P. Ren, and B. Chen, “Linear and nonlinear regression-based maximum correntropy extended Kalman filtering,” IEEE Trans. Syst. Man Cybern. Syst., vol. 51, no. 5, pp. 3093–3102, May 2019.
|
| [30] |
S. Li, D. Shi, W. Zou, and L. Shi, “Multi-kernel maximum correntropy Kalman filter,” IEEE Control Syst. Lett., vol. 6, pp. 1490–1495, 2022. doi: 10.1109/LCSYS.2021.3114137
|
| [31] |
M. V. Kulikova, “Chandrasekhar-based maximum correntropy Kalman filtering with the adaptive kernel size selection,” IEEE Trans. Autom. Control, vol. 65, no. 2, pp. 741–748, Feb. 2020. doi: 10.1109/TAC.2019.2919341
|
| [32] |
X. Liu, B. Chen, B. Xu, Z. Wu, and P. Honeine, “Maximum correntropy unscented filter,” Int. J. Syst. Sci., vol. 48, no. 8, pp. 1607–1615, 2017. doi: 10.1080/00207721.2016.1277407
|
| [33] |
X. Lv, P. Duan, Z. Duan, and J. Song, “Distributed maximum correntropy unscented Kalman filtering with state equality constraints,” Int. J. Robust Nonlinear Control, vol. 31, no. 15, pp. 7053–7071, Oct. 2021. doi: 10.1002/rnc.5677
|
| [34] |
G. Wang, B. Cui, and C. Tang, “Robust cubature Kalman filter based on maximum correntropy and resampling-free sigma-point update framework,” Digital Signal Process., vol. 126, p. 103495, Jun. 2022. doi: 10.1016/j.dsp.2022.103495
|
| [35] |
H. Zhao, B. Tian, and B. Chen, “Robust stable iterated unscented Kalman filter based on maximum correntropy criterion,” Automatica, vol. 142, p. 110410, Aug. 2022. doi: 10.1016/j.automatica.2022.110410
|
| [36] |
M. S. Mahmoud and M. M. Hamdan, “Fundamental issues in networked control systems,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 5, pp. 902–922, Sept. 2018. doi: 10.1109/JAS.2018.7511162
|
| [37] |
X. Wang, Y. Sun, and D. Ding, “Adaptive dynamic programming for networked control systems under communication constraints: A survey of trends and techniques,” Int. J. Netw. Dyn. Intell., vol. 1, no. 1, pp. 85–98, Dec. 2022.
|
| [38] |
X.-M. Zhang, Q.-L. Han, X. Ge, D. Ding, L. Ding, D. Yue, and C. Peng, “Networked control systems: A survey of trends and techniques,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 1–17, Jan. 2020. doi: 10.1109/JAS.2019.1911861
|
| [39] |
G. Bao, L. Ma, and X. Yi, “Recent advances on cooperative control of heterogeneous multi-agent systems subject to constraints: A survey,” Syst. Sci. Control Eng., vol. 10, no. 1, pp. 539–551, Dec. 2022. doi: 10.1080/21642583.2022.2074169
|
| [40] |
J. Mao, Y. Sun, X. Yi, H. Liu, and D. Ding, “Recursive filtering of networked nonlinear systems: A survey,” Int. J. Syst. Sci., vol. 52, no. 6, pp. 1110–1128, Apr. 2021. doi: 10.1080/00207721.2020.1868615
|
| [41] |
J. Li, Z. Wang, J. Hu, H. Liu, and X. Yi, “Communication-protocol-based distributed filtering for general systems over sensor networks: Developments and challenges,” Int. J. Gen. Syst., vol. 51, no. 6, pp. 608–630, Aug. 2022. doi: 10.1080/03081079.2022.2052063
|
| [42] |
X. Wang, D. Ding, H. Dong, and X.-M. Zhang, “Neural-network-based control for discrete-time nonlinear systems with input saturation under stochastic communication protocol,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 4, pp. 766–778, Apr. 2021. doi: 10.1109/JAS.2021.1003922
|
| [43] |
L. Zou, Z. Wang, J. Hu, Y. Liu, and X. Liu, “Communication-protocol-based analysis and synthesis of networked systems: Progress, prospects and challenges,” Int. J. Syst. Sci., vol. 52, no. 14, pp. 3013–3034, Apr. 2021. doi: 10.1080/00207721.2021.1917721
|
| [44] |
W. Ren and J. Xiong, “H∞ control of linear networked and quantized control systems with communication delays and random packet losses,” IEEE Trans. Syst. Man Cybern. Syst., vol. 52, no. 6, pp. 3926–3936, Jun. 2022. doi: 10.1109/TSMC.2021.3078299
|
| [45] |
W. Duo, M. C. Zhou, and A. Abusorrah, “A survey of cyber attacks on cyber physical systems: Recent advances and challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 784–800, May 2022. doi: 10.1109/JAS.2022.105548
|
| [46] |
C. Gao, X. He, H. Dong, H. Liu, and G. Lyu, “A survey on fault-tolerant consensus control of multi-agent systems: Trends, methodologies and prospects,” Int. J. Syst. Sci., vol. 53, no. 13, pp. 2800–2813, Apr. 2022. doi: 10.1080/00207721.2022.2056772
|
| [47] |
R. von Solms and J. van Niekerk, “From information security to cyber security,” Comput. Secur., vol. 38, pp. 97–102, Oct. 2013. doi: 10.1016/j.cose.2013.04.004
|
| [48] |
H. Sandberg, S. Amin, and K. H. Johansson, “Cyberphysical security in networked control systems: An introduction to the issue,” IEEE Control Syst. Mag., vol. 35, no. 1, pp. 20–23, Feb. 2015. doi: 10.1109/MCS.2014.2364708
|
| [49] |
F. Qu, E. Tian, and X. Zhao, “Chance-constrained H∞ state estimation for recursive neural networks under deception attacks and energy constraints: The finite-horizon case,” IEEE Trans. Neural Netw. Learn. Syst., vol. 34, no. 9, pp. 6492–6503, Sept. 2023. doi: 10.1109/TNNLS.2021.3137426
|
| [50] |
W. Chen, D. Ding, H. Dong, and G. Wei, “Distributed resilient filtering for power systems subject to denial-of-service attacks,” IEEE Trans. Syst. Man Cybern. Syst., vol. 49, no. 8, pp. 1688–1697, Aug. 2019. doi: 10.1109/TSMC.2019.2905253
|
| [51] |
J. Huang, D. W. C. Ho, F. Li, W. Yang, and Y. Tang, “Secure remote state estimation against linear man-in-the-middle attacks using watermarking,” Automatica, vol. 121, p. 109182, Nov. 2020. doi: 10.1016/j.automatica.2020.109182
|
| [52] |
J. Shang and T. Chen, “Linear encryption against eavesdropping on remote state estimation,” IEEE Trans. Autom. Control, vol. 68, no. 7, pp. 4413–4419, Jul. 2023.
|
| [53] |
F. Yang, J. Li, H. Dong, and Y. Shen, “Proportional-integral-type estimator design for delayed recurrent neural networks under encoding-decoding mechanism,” Int. J. Syst. Sci., vol. 53, no. 13, pp. 2729–2741, Oct. 2022. doi: 10.1080/00207721.2022.2063968
|
| [54] |
P. Stano, Z. Lendek, J. Braaksma, R. Babuška, C. de Keizer, and A. J. den Dekker, “Parametric Bayesian filters for nonlinear stochastic dynamical systems: A survey,” IEEE Trans. Cybern., vol. 43, no. 6, pp. 1607–1624, Dec. 2013. doi: 10.1109/TSMCC.2012.2230254
|
| [55] |
H. H. Afshari, S. A. Gadsden, and S. Habibi, “Gaussian filters for parameter and state estimation: A general review of theory and recent trends,” Signal Process., vol. 135, pp. 218–238, Jun. 2017. doi: 10.1016/j.sigpro.2017.01.001
|
| [56] |
X. Wang, T. Li, S. Sun, and J. M. Corchado, “A survey of recent advances in particle filters and remaining challenges for multitarget tracking,” Sensors, vol. 17, p. 12, Nov. 2017.
|
| [57] |
H. Fang, N. Tian, Y. Wang, M. C. Zhou, and M. A. Haile, “Nonlinear Bayesian estimation: From Kalman filtering to a broader horizon,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 401–417, Mar. 2018. doi: 10.1109/JAS.2017.7510808
|
| [58] |
Z. Hu, J. Hu, and G. Yang, “A survey on distributed filtering, estimation and fusion for nonlinear systems with communication constraints: New advances and prospects,” Syst. Sci. Control Eng., vol. 8, no. 1, pp. 189–205, Jan. 2020. doi: 10.1080/21642583.2020.1737846
|
| [59] |
D. Ding, Q.-L. Han, X. Ge, and J. Wang, “Secure state estimation and control of cyber-physical systems: A Survey,” IEEE Trans. Syst. Man Cybern. Syst., vol. 51, no. 1, pp. 176–190, Jan. 2021. doi: 10.1109/TSMC.2020.3041121
|
| [60] |
F. Yang, Q. Pan, Y. Liang, Y. Cheng, and W. Liu, “Survey of sampling nonlinear filter,” in Proc. Chinese Control Conf., Harbin, China, 2006, pp. 535–540.
|
| [61] |
O. Hlinka, F. Hlawatsch, and P. M. Djurić, “Distributed particle filtering in agent networks: A survey, classification, and comparison,” IEEE Signal Process. Mag., vol. 30, no. 1, pp. 61–81, Jan. 2013. doi: 10.1109/MSP.2012.2219652
|
| [62] |
E. R. Pinto, E. G. Nepomuceno, and A. S. L. O. Campanharo, “Individual-based modelling of animal brucellosis spread with the use of complex networks,” Int. J. Netw. Dyn. Intell., vol. 1, no. 1, pp. 120–129, Dec. 2022.
|
| [63] |
S. J. Julier, J. K. Uhlmann, and H. F. Durrant-Whyte, “A new approach for filtering nonlinear systems,” in Proc. American Control Conf., Seattle, USA, 1995, pp. 1628–1632.
|
| [64] |
J. Duník, M. Šimandl, and O. Straka, “Unscented Kalman filter: Aspects and adaptive setting of scaling parameter,” IEEE Trans. Autom. Control, vol. 57, no. 9, pp. 2411–2416, Sept. 2012. doi: 10.1109/TAC.2012.2188424
|
| [65] |
J. Kuti, I. J. Rudas, H. Gao, and P. Galambos, “Computationally relaxed unscented Kalman filter,” IEEE Trans. Cybern., vol. 53, no. 3, pp. 1557–1565, Mar. 2023. doi: 10.1109/TCYB.2022.3181211
|
| [66] |
N. J. Gordon, D. J. Salmond and A. F. M. Smith, “Novel approach to nonlinear/non-Gaussian Bayesian state estimation,” IEE Proc. F Radar Signal Process., vol. 140, no. 2, pp. 107–113, Apr. 1993. doi: 10.1049/ip-f-2.1993.0015
|
| [67] |
H. Shao, L. Miao, W. Gao, and J. Shen, “Ensemble particle filter based on KLD and its application to initial alignment of the SINS in large misalignment angles,” IEEE Trans. Ind. Electron., vol. 65, no. 11, pp. 8946–8955, Nov. 2018. doi: 10.1109/TIE.2018.2818673
|
| [68] |
M. Javvad ur Rehman, S. C. Dass, and V. S. Asirvadam, “A weighted likelihood criteria for learning importance densities in particle filtering,” EURASIP J. Adv. Signal Process., vol. 2018, no. 1, p. 36, Jun. 2018. doi: 10.1186/s13634-018-0557-5
|
| [69] |
L. Martino, V. Elvira, and F. Louzada, “Effective sample size for importance sampling based on discrepancy measures,” Signal Process., vol. 131, pp. 386–401, Feb. 2017. doi: 10.1016/j.sigpro.2016.08.025
|
| [70] |
J. Wan, C. Xu, Y. Qiao, and X. Zhang, “Error constraint enhanced particle filter using quantum particle swarm optimization,” IEEE Sens. J., vol. 21, no. 21, pp. 24431–24439, Nov. 2021. doi: 10.1109/JSEN.2021.3113364
|
| [71] |
Y.-G. Park and C. G. Park, “Two stage particle filter based terrain referenced navigation for computational efficiency,” IEEE Sens. J., vol. 19, no. 23, pp. 11396–11402, Dec. 2019. doi: 10.1109/JSEN.2019.2934651
|
| [72] |
C. Liu, B. Li, and W.-H. Chen, “Particle filtering with soft state constraints for target tracking,” IEEE Trans. Aerosp. Electron. Syst., vol. 55, no. 6, pp. 3492–3504, Dec. 2019. doi: 10.1109/TAES.2019.2908292
|
| [73] |
G. Wang, N. Li, and Y. Zhang, “Distributed maximum correntropy linear and nonlinear filters for systems with non-Gaussian noises,” Signal Process., vol. 182, p. 107937, May 2021. doi: 10.1016/j.sigpro.2020.107937
|
| [74] |
R. van der Merwe, A. Doucet, N. de Freitas, and E. Wan, “The unscented particle filter,” in Proc. 13th Int. Conf. Neural Information Processing Systems, Cambridge, USA, 2000, pp. 563–569.
|
| [75] |
Y. Fan, Y. Zhang, G. Wang, X. Wang, and N. Li, “Maximum correntropy based unscented particle filter for cooperative navigation with heavy-tailed measurement noises,” Sensors, vol. 18, no. 10, p. 3183, Sept. 2018. doi: 10.3390/s18103183
|
| [76] |
L. Li and Y. Xia, “Stochastic stability of the unscented Kalman filter with intermittent observations,” Automatica, vol. 48, no. 5, pp. 978–981, May 2012. doi: 10.1016/j.automatica.2012.02.014
|
| [77] |
L. Li and Y. Xia, “Unscented Kalman filter over unreliable communication networks with Markovian packet dropouts,” IEEE Trans. Autom. Control, vol. 58, no. 12, pp. 3224–3230, Dec. 2013. doi: 10.1109/TAC.2013.2263650
|
| [78] |
L. Li, D. Yu, Y. Xia, and H. Yang, “Event-triggered UKF for nonlinear dynamic systems with packet dropout,” Int. J. Robust Nonlinear Control, vol. 27, no. 18, pp. 4208–4226, Dec. 2017. doi: 10.1002/rnc.3790
|
| [79] |
C. Yang and H. Fang, “Modified particle filter and Gaussian filter with packet dropouts,” Int. J. Robust Nonlinear Control, vol. 28, no. 8, pp. 2961–2975, May 2018. doi: 10.1002/rnc.4060
|
| [80] |
C. Yang, H. Fang, and B. Shi, “Particle filter with Markovian packet dropout and time delay,” J. Franklin Inst., vol. 356, no. 1, pp. 675–696, Jan. 2019. doi: 10.1016/j.jfranklin.2018.10.020
|
| [81] |
Z. Deng, L. Shi, L. Yin, Y. Xia, and B. Huo, “UKF based on maximum correntropy criterion in the presence of both intermittent observations and non-Gaussian noise,” IEEE Sens. J., vol. 20, no. 14, pp. 7766–7773, Jul. 2020. doi: 10.1109/JSEN.2020.2980354
|
| [82] |
J. Liu, Q. Shao, and C. Hua, “Consensus-based cubature information filtering for sensor networks with incomplete measurements,” Neurocomputing, vol. 364, pp. 49–62, Oct. 2019. doi: 10.1016/j.neucom.2019.07.030
|
| [83] |
Y. Yu, J. Yu, Y. Liu, and Z. Ren, “Distributed state estimation for heterogeneous mobile sensor networks with stochastic observation loss,” Chin. J. Aeronaut., vol. 35, no. 2, pp. 265–275, Feb. 2022. doi: 10.1016/j.cja.2021.02.014
|
| [84] |
G. Wang, N. Li, and Y. Zhang, “Diffusion nonlinear Kalman filter with intermittent observations,” Proceed. Inst. Mech. Eng. Part G J. Aerosp. Eng., vol. 232, no. 15, pp. 2775–2783, Dec. 2018. doi: 10.1177/0954410017716192
|
| [85] |
H. Chen, J. Wang, C. Y. Wang, J. Y. Shan, and M. Xin, “Distributed diffusion unscented Kalman filtering based on covariance intersection with intermittent measurements,” Automatica, vol. 132, p. 109769, Oct. 2021. doi: 10.1016/j.automatica.2021.109769
|
| [86] |
L. Li and Y. Xia, “UKF-based nonlinear filtering over sensor networks with wireless fading channel,” Inf. Sci., vol. 316, pp. 132–147, Sept. 2015. doi: 10.1016/j.ins.2015.04.026
|
| [87] |
X. Bai, H. Xu, J. Li, X. Gao, F. Qin, and X. Zheng, “Coal mine personnel positioning algorithm based on improved adaptive unscented Kalman filter with wireless channel fading and unknown noise statistics,” Trans. Inst. Meas. Control, vol. 44, no. 6, pp. 1217–1227, Apr. 2022. doi: 10.1177/01423312211051202
|
| [88] |
L. Li, D. Yu, Y. Xia, and H. Yang, “Stochastic stability of a modified unscented Kalman filter with stochastic nonlinearities and multiple fading measurements,” J. Franklin Inst., vol. 354, no. 2, pp. 650–667, Jan. 2017. doi: 10.1016/j.jfranklin.2016.10.028
|
| [89] |
W. Li, Z. Wang, Y. Yuan, and L. Guo, “Two-stage particle filtering for non-Gaussian state estimation with fading measurements,” Automatica, vol. 115, p. 108882, May 2020. doi: 10.1016/j.automatica.2020.108882
|
| [90] |
A. K. Singh, P. Date, and S. Bhaumik, “A modified Bayesian filter for randomly delayed measurements,” IEEE Trans. Autom. Control, vol. 62, no. 1, pp. 419–424, Jan. 2017. doi: 10.1109/TAC.2016.2531418
|
| [91] |
R. K. Tiwari, S. Bhaumik, P. Date, and T. Kirubarajan, “Particle filter for randomly delayed measurements with unknown latency probability,” Sensors, vol. 20, no. 19, p. 5689, Oct. 2020. doi: 10.3390/s20195689
|
| [92] |
L. Xu, K. Ma, W. Li, Y. Liu, and F. E. Alsaadi, “Particle filtering for networked nonlinear systems subject to random one-step sensor delay and missing measurements,” Neurocomputing, vol. 275, pp. 2162–2169, Jan. 2018. doi: 10.1016/j.neucom.2017.10.059
|
| [93] |
Y. Chen, Z. Yan, and X. Zhang, “A novel particle filtering for nonlinear systems with multi-step randomly delayed measurements,” Appl. Math. Modell., vol. 100, pp. 282–302, Dec. 2021. doi: 10.1016/j.apm.2021.07.026
|
| [94] |
G. Kumar, S. K. Nanda, A. K. Verma, V. Bhatia, and A. K. Singh, “Nonlinear Gaussian filtering with network-induced delay in measurements,” IEEE Trans. Aerosp. Electron. Syst., vol. 58, no. 6, pp. 5974–5981, Dec. 2022. doi: 10.1109/TAES.2022.3182936
|
| [95] |
J. Zuo and X. Zhong, “Particle filter for nonlinear systems with multi-sensor asynchronous random delays,” J. Syst. Eng. Electron., vol. 28, no. 6, pp. 1064–1071, Dec. 2017. doi: 10.21629/JSEE.2017.06.04
|
| [96] |
C. S. Maíz, E. M. Molanes-López, J. Míguez, and P. M. Djurić, “A particle filtering scheme for processing time series corrupted by outliers,” IEEE Trans. Signal Process., vol. 60, no. 9, pp. 4611–4627, Sept. 2012. doi: 10.1109/TSP.2012.2200480
|
| [97] |
J. Zhao and L. Mili, “Robust unscented Kalman filter for power system dynamic state estimation with unknown noise statistics,” IEEE Trans. Smart Grid, vol. 10, no. 2, pp. 1215–1224, Mar. 2019. doi: 10.1109/TSG.2017.2761452
|
| [98] |
Y. Shen, Z. Wang, B. Shen, and H. Dong, “Outlier-resistant recursive filtering for multisensor multirate networked systems under weighted try-once-discard protocol,” IEEE Trans. Cybern., vol. 51, no. 10, pp. 4897–4908, Oct. 2021. doi: 10.1109/TCYB.2020.3021194
|
| [99] |
X. Zhang, B. He, S. Gao, P. Mu, J. Xu, and N. Zhai, “Multiple model AUV navigation methodology with adaptivity and robustness,” Ocean Eng., vol. 254, p. 111258, Jun. 2022. doi: 10.1016/j.oceaneng.2022.111258
|
| [100] |
Z. Wang, Y. Huang, M. Wang, J. Wu, and Y. Zhang, “A computationally efficient outlier-robust cubature Kalman filter for underwater gravity matching navigation,” IEEE Trans. Instrum. Meas., vol. 71, p. 8500418, Jan. 2022.
|
| [101] |
J. He, C. Sun, B. Zhang, and P. Wang, “Variational Bayesian-based maximum correntropy cubature Kalman filter with both adaptivity and robustness,” IEEE Sens. J., vol. 21, no. 2, pp. 1982–1992, Jan. 2021. doi: 10.1109/JSEN.2020.3020273
|
| [102] |
K. W. Zhang, G. Hao, Y. Li, M. Zhao, and H. Li, “Fusion estimation for multi-sensor nonlinear system with disorder and packet loss,” in Proc. Chinese Control and Decision Conf., Hefei, China, 2020, pp. 1231–1236.
|
| [103] |
W. Song, Z. Wang, Z. Li, and Q.-L. Han, “Particle-filter-based state estimation for delayed artificial neural networks: When probabilistic saturation constraints meet redundant channels,” IEEE Trans. Neural Netw. Learn. Syst., vol. 35, no. 3, pp. 4354–4362, 2024.
|
| [104] |
Y. Liu, Z. Wang, C. Liu, M. Coombes, and W.-H. Chen, “Auxiliary particle filtering over sensor networks under protocols of amplify-and-forward and decode-and-forward relays,” IEEE Trans. Signal Inf. Process. Netw., vol. 8, pp. 883–893, Oct. 2022.
|
| [105] |
M. Kooshkbaghi, H. J. Marquez, and W. Xu, “Event-triggered approach to dynamic state estimation of a synchronous machine using cubature Kalman filter,” IEEE Trans. Control Syst. Technol., vol. 28, no. 5, pp. 2013–2020, Sept. 2020. doi: 10.1109/TCST.2019.2923374
|
| [106] |
L. Li, M. Fan, Y. Xia, and C. Zhu, “Recursive distributed fusion estimation for nonlinear stochastic systems with event-triggered feedback,” J. Franklin Inst., vol. 358, no. 14, pp. 7286–7307, Sept. 2021. doi: 10.1016/j.jfranklin.2021.07.036
|
| [107] |
S. Li, Z. Li, J. Li, T. Fernando, H. H.-C. Iu, Q. Wang, and X. Liu, “Application of event-triggered cubature Kalman filter for remote nonlinear state estimation in wireless sensor network,” IEEE Trans. Ind. Electron., vol. 68, no. 6, pp. 5133–5145, Jun. 2021. doi: 10.1109/TIE.2020.2987279
|
| [108] |
X. Bai, F. Qin, L. Ge, L. Zeng, and X. Zheng, “Dynamic state estimation for synchronous generator with communication constraints: An improved regularized particle filter approach,” IEEE Trans. Sustain. Comput., vol. 8, no. 2, pp. 222–231, Apr.–Jun. 2023. doi: 10.1109/TSUSC.2022.3221090
|
| [109] |
W. Song, J. Wang, S. Zhao, and J. Shan, “Event-triggered cooperative unscented Kalman filtering and its application in multi-UAV systems,” Automatica, vol. 105, pp. 264–273, Jul. 2019. doi: 10.1016/j.automatica.2019.03.029
|
| [110] |
L. Shi, F. Yang, and L. Zheng, “Novel event-triggered distributed state estimation algorithm for nonlinear systems over wireless sensor networks,” Int. J. Robust Nonlinear Control, vol. 32, no. 17, pp. 9078–9098, Nov. 2022. doi: 10.1002/rnc.6321
|
| [111] |
A. Mohammadi, S. Davar, and K. N. Plataniotis, “Ternary-event-based state estimation with joint point, quantized, and set-valued measurements,” IEEE Signal Process. Lett., vol. 25, no. 5, pp. 665–669, May 2018. doi: 10.1109/LSP.2018.2812152
|
| [112] |
C. Li, Z. Wang, W. Song, S. Zhao, J. Wang, and J. Shan, “Resilient unscented Kalman filtering fusion with dynamic event-triggered scheme: Applications to multiple unmanned aerial vehicles,” IEEE Trans. Control Syst. Technol., vol. 31, no. 1, pp. 370–381, Jan. 2023. doi: 10.1109/TCST.2022.3180942
|
| [113] |
W. Song, Z. Wang, J. Wang, F. E. Alsaadi, and J. Shan, “Distributed auxiliary particle filtering with diffusion strategy for target tracking: A dynamic event-triggered approach,” IEEE Trans. Signal Process., vol. 69, pp. 328–340, Dec. 2021. doi: 10.1109/TSP.2020.3042947
|
| [114] |
H. Song, D. Ding, X. Wang, and M. Xie, “Event-triggered distributed maximum correntropy filtering in non-Gaussian environments,” in Proc. 7th Int. Conf. Intelligent Computing for Sustainable Energy and Environment, LSMS: Int. Conf. Life System Modeling and Simulation, Hangzhou, China, 2021, pp. 572–582.
|
| [115] |
X. Liu, L. Li, Z. Li, X. Chen, T. Fernando, H. H.-C. Iu, and G. He, “Event-trigger particle filter for smart grids with limited communication bandwidth infrastructure,” IEEE Trans. Smart Grid, vol. 9, no. 6, pp. 6918–6928, Nov. 2018. doi: 10.1109/TSG.2017.2728687
|
| [116] |
W. Li, Z. Wang, Q. Liu, and L. Guo, “An information aware event-triggered scheme for particle filter based remote state estimation,” Automatica, vol. 103, pp. 151–158, May 2019. doi: 10.1016/j.automatica.2019.01.020
|
| [117] |
C.-H. Zhang and G.-H. Yang, “Event-based remote state estimation for nonlinear systems: A box particle filtering method,” IEEE Trans. Cybern., vol. 54, no. 4, pp. 2472–2482, 2024.
|
| [118] |
D. Han, Y. Mo, J. Wu, S. Weerakkody, B. Sinopoli, and L. Shi, “Stochastic event-triggered sensor schedule for remote state estimation,” IEEE Trans. Autom. Control, vol. 60, no. 10, pp. 2661–2675, Oct. 2015. doi: 10.1109/TAC.2015.2406975
|
| [119] |
L. Li, D. Yu, Y. Xia, and H. Yang, “Remote nonlinear state estimation with stochastic event-triggered sensor schedule,” IEEE Trans. Cybern., vol. 49, no. 3, pp. 734–745, Mar. 2019. doi: 10.1109/TCYB.2017.2776976
|
| [120] |
Y.-C. Sun and G.-H. Yang, “Distributed unscented Kalman filtering for nonlinear systems: A mixed event-triggered strategy,” Int. J. Robust Nonlinear Control, vol. 31, no. 10, pp. 4647–4663, Jul. 2021. doi: 10.1002/rnc.5496
|
| [121] |
S. Liu, Z. Wang, Y. Chen, and G. Wei, “Protocol-based unscented Kalman filtering in the presence of stochastic uncertainties,” IEEE Trans. Autom. Control, vol. 65, no. 3, pp. 1303–1309, Mar. 2020. doi: 10.1109/TAC.2019.2929817
|
| [122] |
N. Sadeghzadeh-Nokhodberiz and N. Meskin, “Protocol-based particle filtering and divergence estimation,” IEEE Syst. J., vol. 15, no. 3, pp. 4537–4544, Sept. 2021. doi: 10.1109/JSYST.2020.3002907
|
| [123] |
D. Liu, D. Ding, Y. Sun, and G. Wei, “Nonlinear filtering under stochastic communication protocol with unknown scheduling probability,” Int. J. Control Autom. Syst., vol. 19, no. 10, pp. 3343–3353, Oct. 2021. doi: 10.1007/s12555-020-0337-5
|
| [124] |
L. Sheng, W. Huai, Y. Niu, and M. Gao, “Consensus-based unscented Kalman filtering over sensor networks with communication protocols,” Int. J. Robust Nonlinear Control, vol. 31, no. 13, pp. 6349–6368, Sept. 2021. doi: 10.1002/rnc.5614
|
| [125] |
C. Altay and H. Delic, “Optimal quantization intervals in distributed detection,” IEEE Trans. Aerosp. Electron. Syst., vol. 52, no. 1, pp. 38–48, Feb. 2016. doi: 10.1109/TAES.2015.140551
|
| [126] |
M. Naderipour, A. Taherpour, A. Taherpour, and S. Gazor, “Design of optimal non-uniform quantizer in imperfect noisy reporting channels for collaborative spectrum sensing,” IEEE Trans. Veh. Technol., vol. 69, no. 11, pp. 12870–12882, Nov. 2020. doi: 10.1109/TVT.2020.3015219
|
| [127] |
X. Yang, R. Niu, E. Masazade, and P. K. Varshney, “Channel-aware tracking in multi-hop wireless sensor networks with quantized measurements,” IEEE Trans. Aerosp. Electron. Syst., vol. 49, no. 4, pp. 2353–2368, Oct. 2013. doi: 10.1109/TAES.2013.6621821
|
| [128] |
Y. Liu, Z. Wang, C. Liu, M. Coombes, and W.-H. Chen, “A novel algorithm for quantized particle filtering with multiple degrading sensors: Degradation estimation and target tracking,” IEEE Trans. Ind. Inf., vol. 19, no. 4, pp. 5830–5838, Apr. 2023. doi: 10.1109/TII.2022.3176910
|
| [129] |
A. Ribeiro, G. B. Giannakis, and S. I. Roumeliotis, “SOI-KF: Distributed Kalman filtering with low-cost communications using the sign of innovations,” IEEE Trans. Signal Process., vol. 54, no. 12, pp. 4782–4795, Dec. 2006. doi: 10.1109/TSP.2006.882059
|
| [130] |
Z. Hu, B. Chen, Y. Zhang, and L. Yu, “Kalman-like filter under binary sensors,” IEEE Trans. Instrum. Meas., vol. 71, p. 9503111, Feb. 2022.
|
| [131] |
Y. Zhao, C. Fritsche, F. Yin, F. Gunnarsson, and F. Gustafsson, “Sequential Monte Carlo methods and theoretical bounds for proximity report based indoor positioning,” IEEE Trans. Veh. Technol., vol. 67, no. 6, pp. 5372–5386, Jun. 2018. doi: 10.1109/TVT.2018.2799174
|
| [132] |
A. K. Singh, S. Kumar, N. Kumar, and R. Radhakrishnan, “Bayesian approximation filtering with false data attack on network,” IEEE Trans. Aerosp. Electron. Syst., vol. 58, no. 2, pp. 976–988, Apr. 2022. doi: 10.1109/TAES.2021.3117664
|
| [133] |
W. Song, Z. Wang, J. Wang, F. E. Alsaadi, and J. Shan, “Secure particle filtering for cyber-physical systems with binary sensors under multiple attacks,” IEEE Syst. J., vol. 16, no. 1, pp. 603–613, Mar. 2022. doi: 10.1109/JSYST.2021.3064920
|
| [134] |
H. Song, D. Ding, H. Dong, and Q.-L. Han, “Distributed maximum correntropy filtering for stochastic nonlinear systems under deception attacks,” IEEE Trans. Cybern., vol. 52, no. 5, pp. 3733–3744, May 2022. doi: 10.1109/TCYB.2020.3016093
|
| [135] |
Y.-W. Lv and G.-H. Yang, “An adaptive cubature Kalman filter for nonlinear systems against randomly occurring injection attacks,” Appl. Math. Comput., vol. 418, p. 126834, Apr. 2022. doi: 10.1016/j.amc.2021.126834
|
| [136] |
N. Sadeghzadeh-Nokhodberiz, N. Meskin, and S. Hasanzadeh, “Modified particle filters for detection of false data injection attacks and state estimation in networked nonlinear systems,” IEEE Access, vol. 10, pp. 32728–32741, Mar. 2022. doi: 10.1109/ACCESS.2022.3161459
|
| [137] |
W. Wang, X. Chen, Z. Li, J. Jia, and M. Zhang, “Distributed filtering for nonlinear systems under Dempster-Shafer theory subject to malicious cyber attacks,” Int. J. Robust Nonlinear Control, vol. 32, no. 9, pp. 5485–5500, Jun. 2022. doi: 10.1002/rnc.6097
|
| [138] |
M. Adeli, M. Hajatipour, M. J. Yazdanpanah, M. Shafieirad, and H. Hashemi-Dezaki, “Distributed trust-based unscented Kalman filter for non-linear state estimation under cyber-attacks: The application of manoeuvring target tracking over wireless sensor networks,” IET Control Theory Appl., vol. 15, no. 15, pp. 1987–1998, Oct. 2021. doi: 10.1049/cth2.12173
|
| [139] |
C. Zhao, J. S. Gill, P. Pisu, and G. Comert, “Detection of false data injection attack in connected and automated vehicles via cloud-based sandboxing,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 7, pp. 9078–9088, Jul. 2022. doi: 10.1109/TITS.2021.3090361
|
| [140] |
C. Shen, H. Chen, and L. Xie, “Distributed target tracking under Byzantine data attacks,” in Proc. 7th Int. Conf. Communication and Network Security, Tokyo, Japan, 2017, pp. 114–119.
|
| [141] |
J. Le Ny and G. J. Pappas, “Differentially private filtering,” IEEE Trans. Autom. Control, vol. 59, no. 2, pp. 341–354, Feb. 2014. doi: 10.1109/TAC.2013.2283096
|
| [142] |
A. Moradi, N. K. D. Venkategowda, S. P. Talebi, and S. Werner, “Privacy-preserving distributed Kalman filtering,” IEEE Trans. Signal Process., vol. 70, pp. 3074–3089, Jun. 2022. doi: 10.1109/TSP.2022.3182590
|
| [143] |
L. Fan and L. Xiong, “An adaptive approach to real-time aggregate monitoring with differential privacy,” IEEE Trans. Knowl. Data Eng., vol. 26, no. 9, pp. 2094–2106, Sept. 2014. doi: 10.1109/TKDE.2013.96
|
| [144] |
J. Wang, R. Zhu, and S. Liu, “A differentially private unscented Kalman filter for streaming data in IoT,” IEEE Access, vol. 6, pp. 6487–6495, Jan. 2018. doi: 10.1109/ACCESS.2018.2797159
|
| [145] |
J. Yuan, Y. Wang, and Z. Ji, “A differentially private square root unscented Kalman filter for protecting process parameters in ICPSs,” ISA Trans., vol. 104, pp. 44–52, Sept. 2020. doi: 10.1016/j.isatra.2019.12.010
|
| [146] |
N. Das and R. Bhattacharya, “Privacy and utility aware data sharing for space situational awareness from ensemble and unscented Kalman filtering perspective,” IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 2, pp. 1162–1176, Apr. 2021. doi: 10.1109/TAES.2020.3038243
|
| [147] |
J. Zha, L. Han, X. Dong, and Z. Ren, “Privacy-preserving push-sum distributed cubature information filter for nonlinear target tracking with switching directed topologies,” ISA Trans., vol. 136, pp. 16–30, May 2023. doi: 10.1016/j.isatra.2022.10.027
|
| [148] |
C. Veibäck, J. Olofsson, T. R. Lauknes, and G. Hendeby, “Learning target dynamics while tracking using Gaussian processes,” IEEE Trans. Aerosp. Electron. Syst., vol. 56, no. 4, pp. 2591–2602, Apr. 2020. doi: 10.1109/TAES.2019.2948699
|
| [149] |
K. Shen, C. Zhang, P. Dong, Z. Jing, and H. Leung, “Consensus-based labeled multi-Bernoulli filter with event-triggered communication,” IEEE Trans. Signal Process., vol. 70, pp. 1185–1196, Feb. 2022. doi: 10.1109/TSP.2022.3154227
|
| [150] |
G. Li, G. Battistelli, L. Chisci, L. Gao, and P. Wei, “Event-triggered consensus LMB filter for distributed multitarget tracking,” IEEE Trans. Aerosp. Electron. Syst., vol. 59, no. 1, pp. 712–719, Feb. 2023. doi: 10.1109/TAES.2022.3187390
|
Figures(6) / Tables(4)






 DownLoad:
DownLoad: