A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 7
Volume 10
Issue 7
IEEE/CAA Journal of Automatica Sinica
| Citation: | Z. W. Zheng, J. Z. Li, Z. Y. Guan, and Z. Y. Zuo, “Constrained moving path following control for UAV with robust control barrier function,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 7, pp. 1557–1570, Jul. 2023. doi: 10.1109/JAS.2023.123573

|
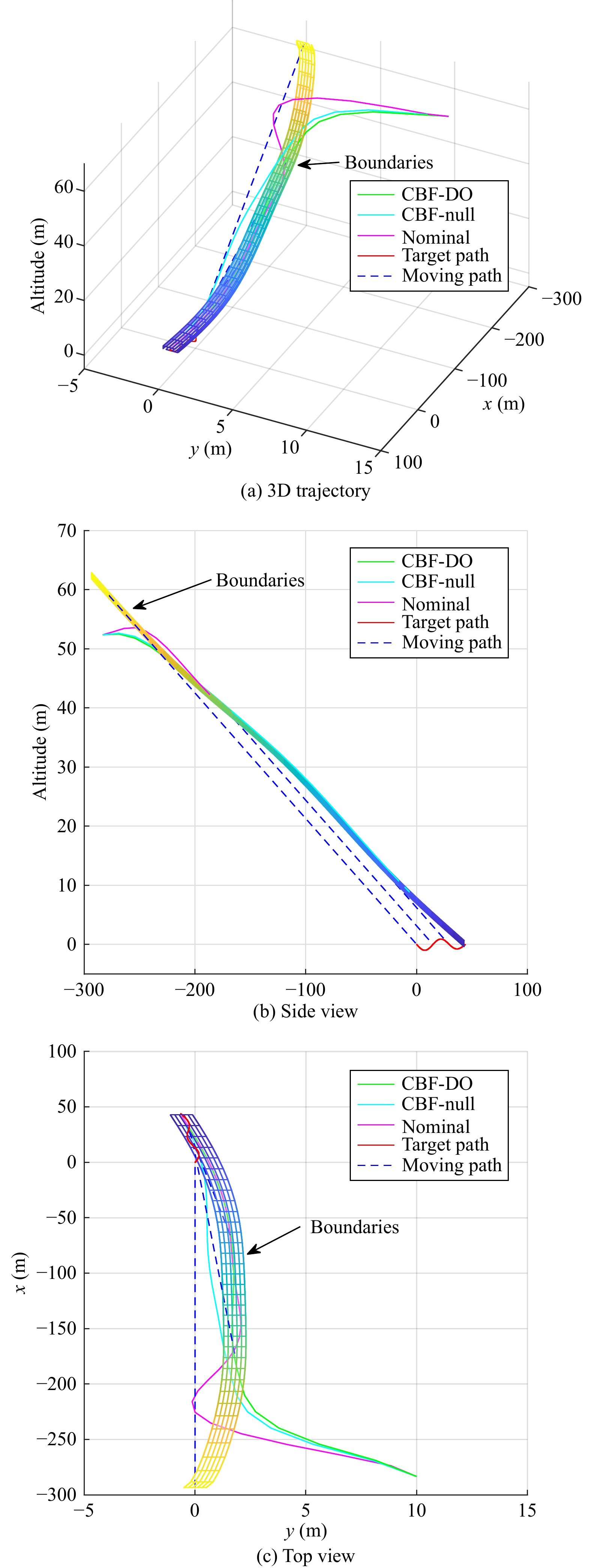
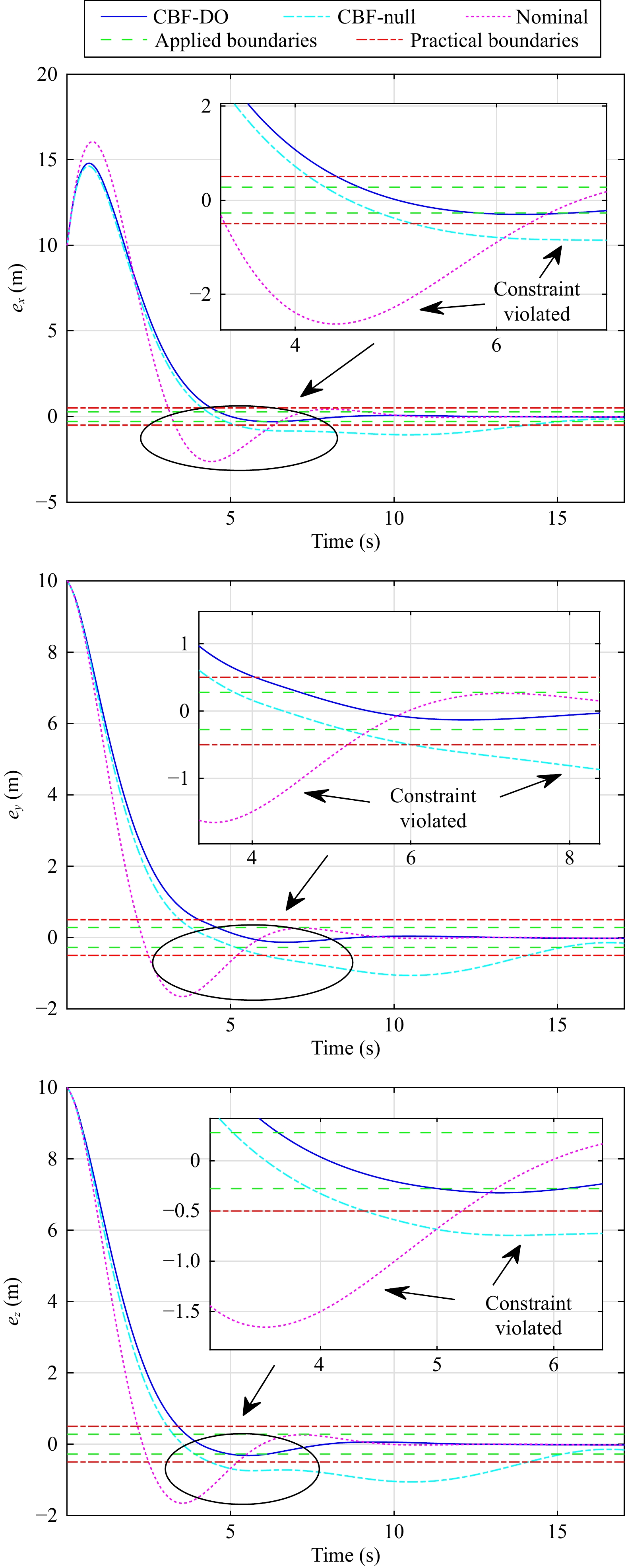
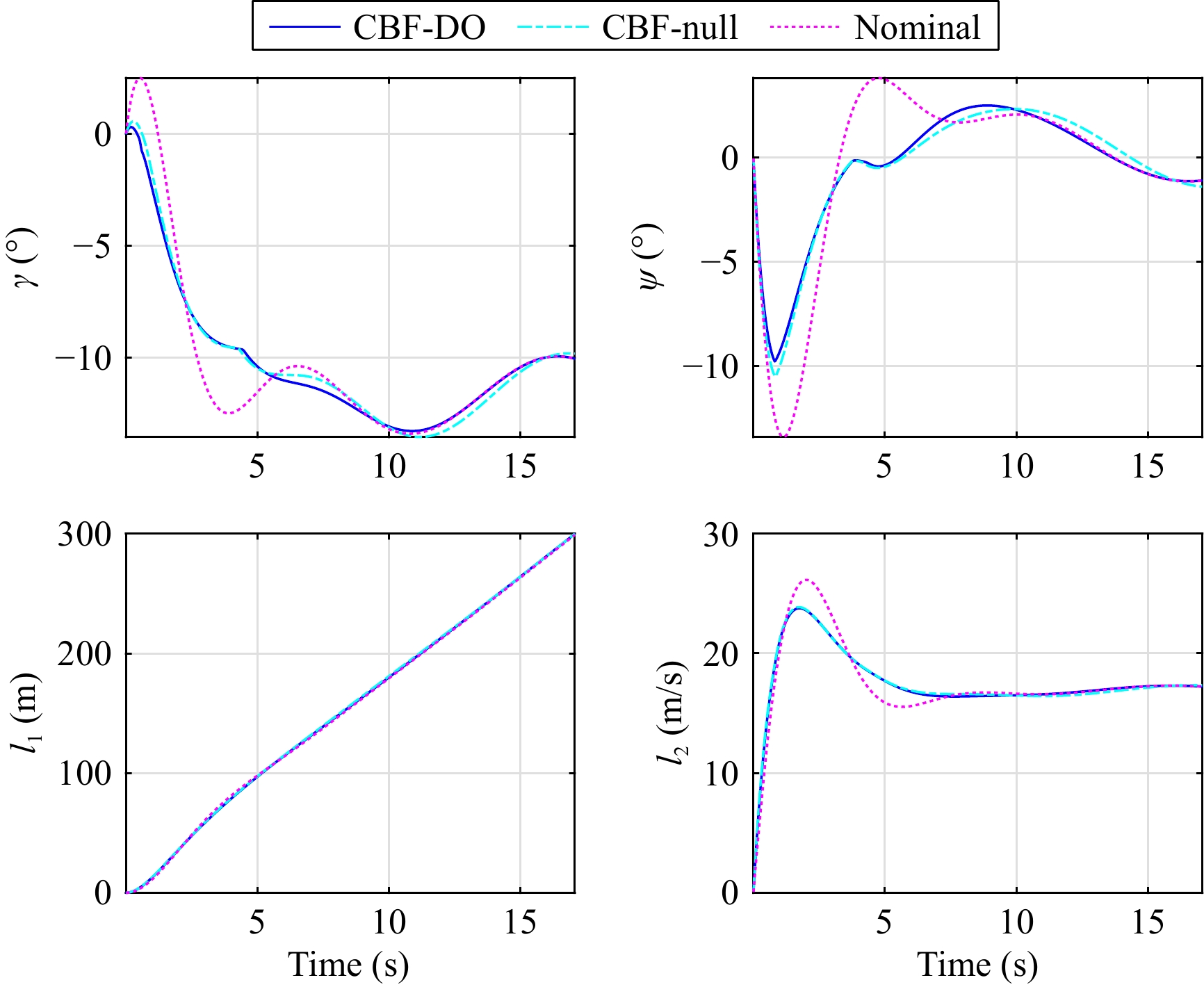
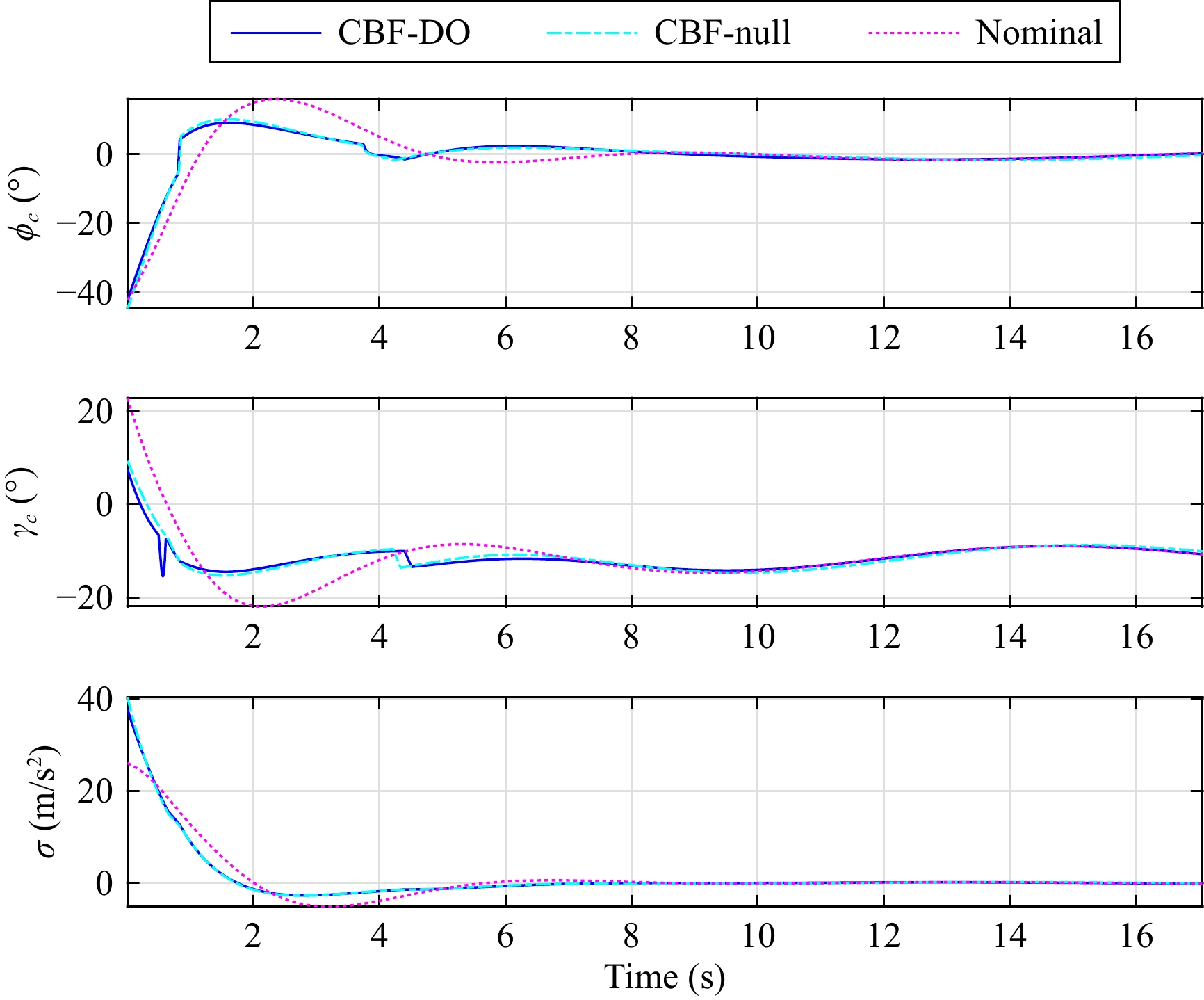
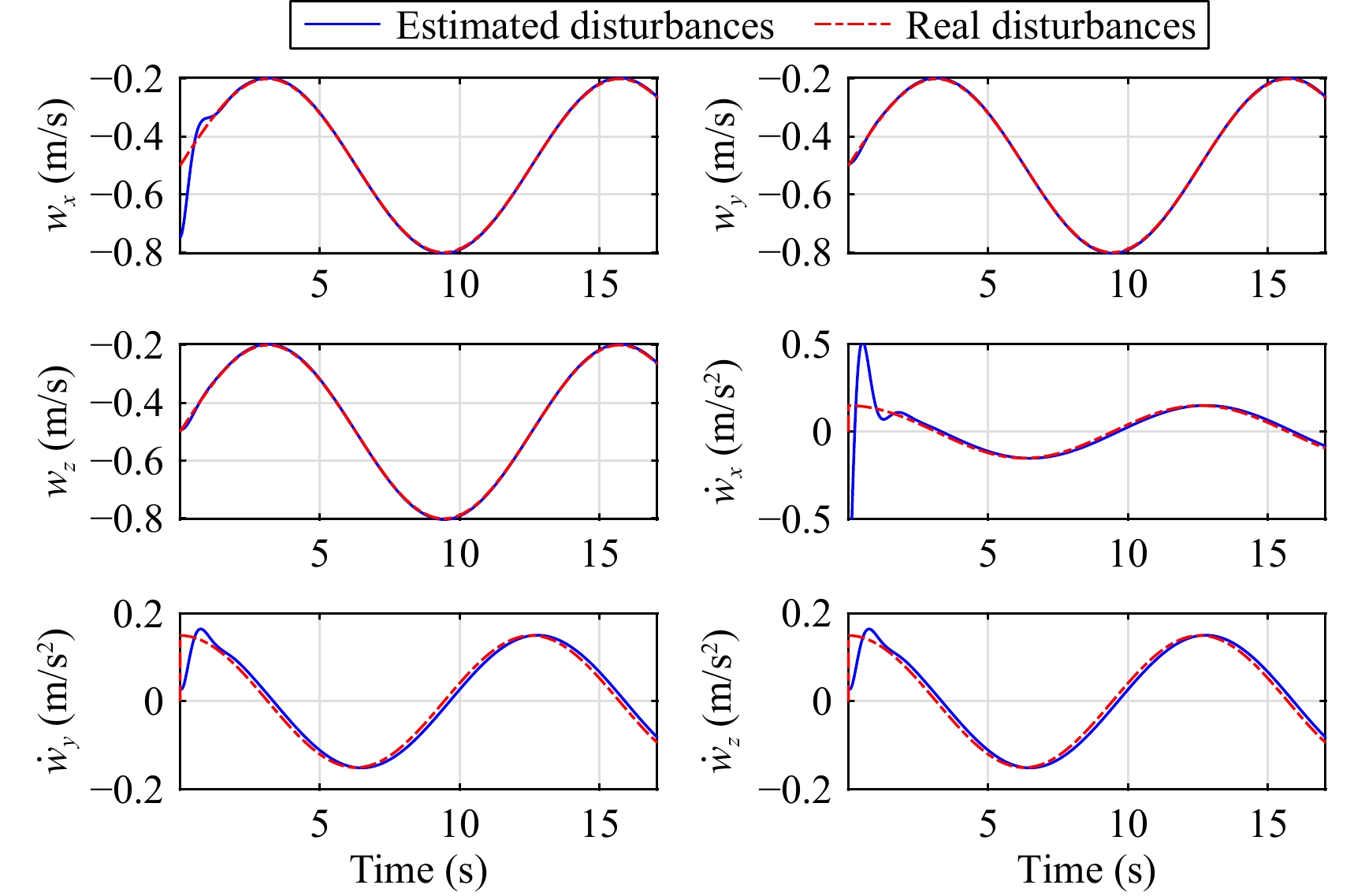
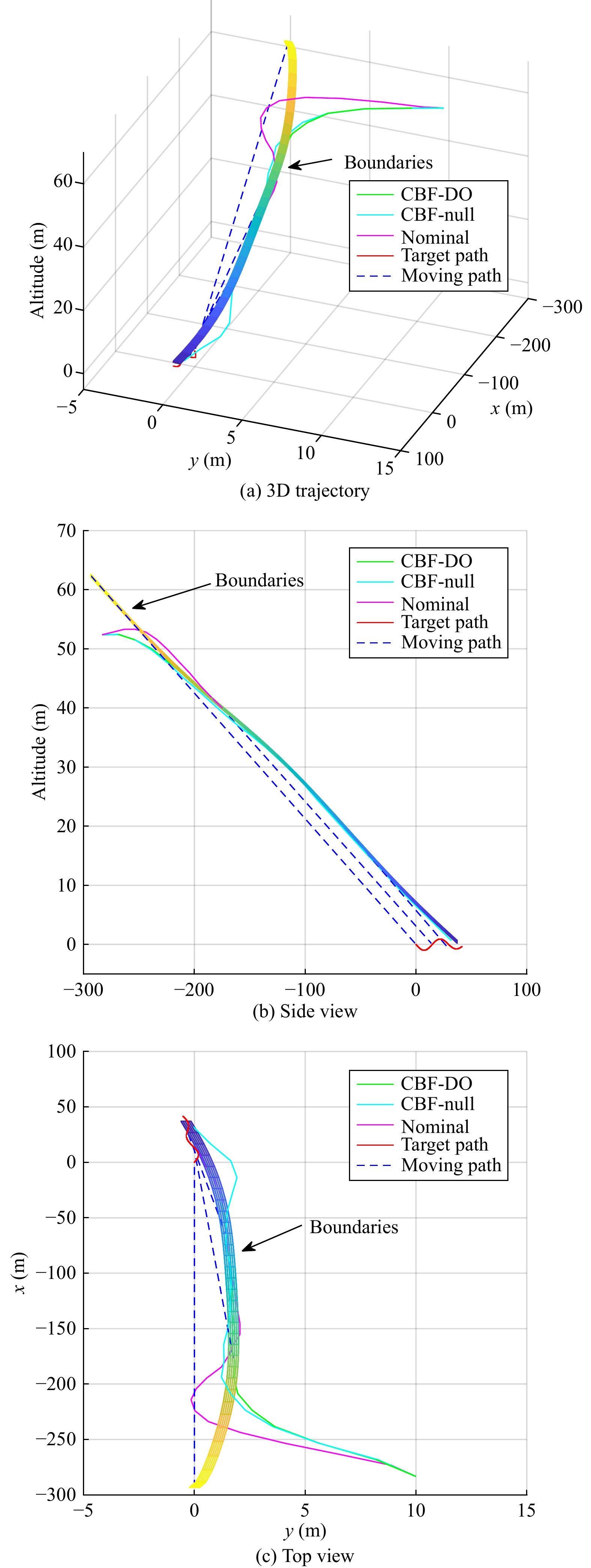
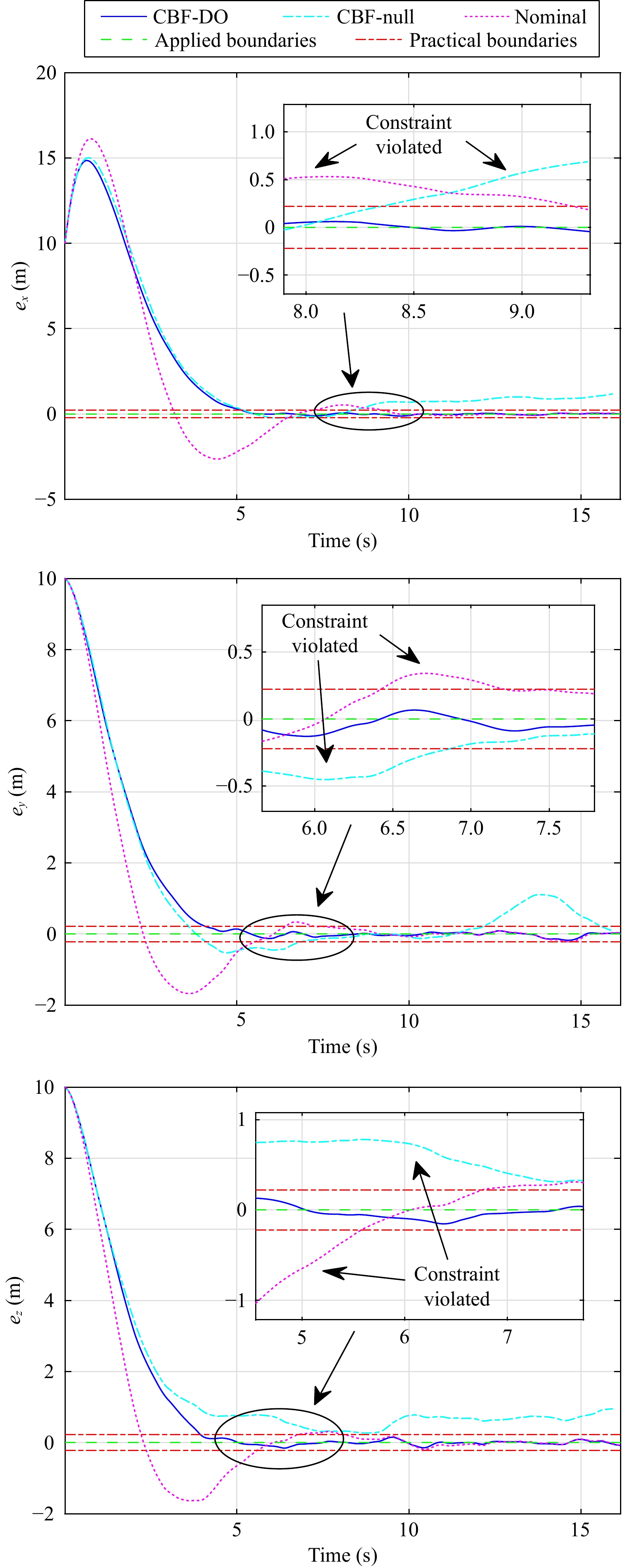
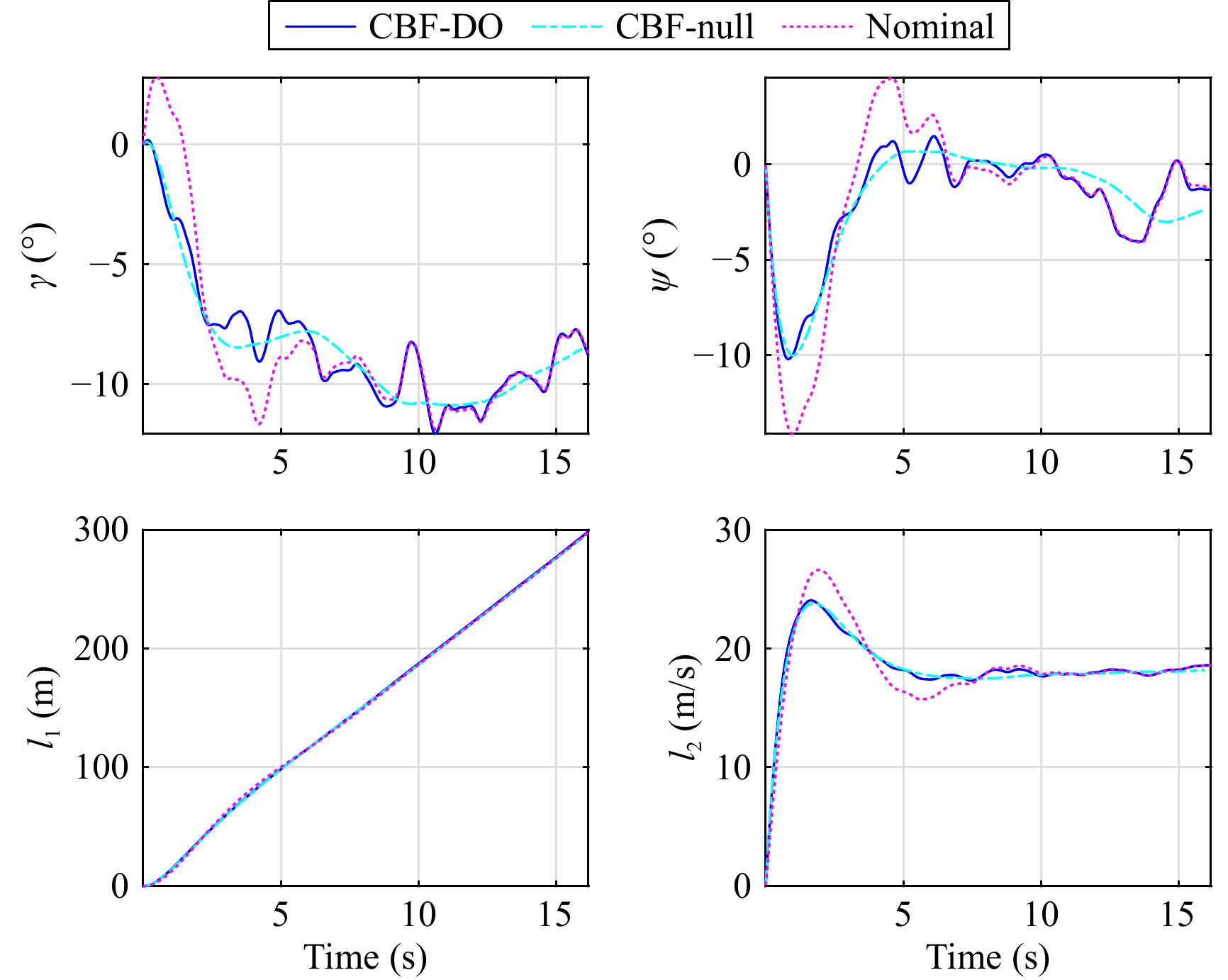
This paper studies the moving path following (MPF) problem for fixed-wing unmanned aerial vehicle (UAV) under output constraints and wind disturbances. The vehicle is required to converge to a reference path moving with respect to the inertial frame, while the path following error is not expected to violate the predefined boundaries. Differently from existing moving path following guidance laws, the proposed method removes complex geometric transformation by formulating the moving path following problem into a second-order time-varying control problem. A nominal moving path following guidance law is designed with disturbances and their derivatives estimated by high-order disturbance observers. To guarantee that the path following error will not exceed the prescribed bounds, a robust control barrier function is developed and incorporated into controller design with quadratic program based framework. The proposed method does not require the initial position of the UAV to be within predefined boundaries. And the safety margin concept makes error-constraint be respected even if in a noisy environment. The proposed guidance law is validated through numerical simulations of shipboard landing and hardware-in-the-loop (HIL) experiments.

| [1] |
A. P. Aguiar and J. P. Hespanha, “Trajectory-tracking and path-following of underactuated autonomous vehicles with parametric modeling uncertainty,” IEEE Trans. Autom. Control, vol. 52, no. 8, pp. 1362–1379, Aug. 2007. doi: 10.1109/TAC.2007.902731
|
| [2] |
R. W. Beard, J. Ferrin, and J. Humpherys, “Fixed wing UAV path following in wind with input constraints,” IEEE Trans. Control Syst. Technol., vol. 22, no. 6, pp. 2103–2117, Nov. 2014. doi: 10.1109/TCST.2014.2303787
|
| [3] |
Z. Y. Zuo, C. J. Liu, Q.-L. Han, and J. W. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–614, Apr. 2022. doi: 10.1109/JAS.2022.105410
|
| [4] |
B. Rubí, R. Pérez, and B. Morcego, “A survey of path following control strategies for UAVs focused on quadrotors,” J. Intell. Rob. Syst., vol. 98, no. 2, pp. 241–265, May 2020. doi: 10.1007/s10846-019-01085-z
|
| [5] |
Y. Xiu, H. B. Deng, D. F. Li, M. M. Zhang, R. Law, Y. Huang, E. Q. Wu, and X. Xu, “Finite-time sideslip differentiator-based los guidance for robust path following of snake robots,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 1, pp. 239–253, Jan. 2023. doi: 10.1109/JAS.2022.106052
|
| [6] |
D. R. Nelson, D. B. Barber, T. W. McLain, and R. W. Beard, “Vector field path following for miniature air vehicles,” IEEE Trans. Rob., vol. 23, no. 3, pp. 519–529, Jun. 2007. doi: 10.1109/TRO.2007.898976
|
| [7] |
S. Farí, X. M. Wang, S. Roy, and S. Baldi, “Addressing unmodeled path-following dynamics via adaptive vector field: A UAV test case,” IEEE Trans. Aerosp. Electron. Syst., vol. 56, no. 2, pp. 1613–1622, Apr. 2020. doi: 10.1109/TAES.2019.2925487
|
| [8] |
S. Park, J. Deyst, and J. How, “A new nonlinear guidance logic for trajectory tracking,” in Proc. AIAA Guidance, Navigation, and Control Conf. and Exhibit, Providence, Rhode Island, 2004.
|
| [9] |
H. Y. Deng and T. Ohtsuka, “ParNMPC-a parallel optimisation toolkit for real-time nonlinear model predictive control,” Int. J. Control, vol. 95, no. 2, pp. 390–405, Feb. 2022. doi: 10.1080/00207179.2020.1798019
|
| [10] |
J. Tan and S. J. Guo, “Backstepping control with fixed-time prescribed performance for fixed wing UAV under model uncertainties and external disturbances,” Int. J. Control, vol. 95, no. 4, pp. 934–951, Apr. 2022. doi: 10.1080/00207179.2020.1831700
|
| [11] |
M. Rahmani and M. H. Rahman, “New hybrid control of autonomous underwater vehicles,” Int. J. Control, vol. 94, no. 11, pp. 3038–3045, 2021. doi: 10.1080/00207179.2020.1749938
|
| [12] |
Z. Q. Han, Y. T. Wang, and Q. Sun, “Straight-path following and formation control of USVs using distributed deep reinforcement learning and adaptive neural network,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 572–574, Feb. 2023. doi: 10.1109/JAS.2023.123255
|
| [13] |
T. Oliveira, A. P. Aguiar, and P. Encarnação, “Moving path following for unmanned aerial vehicles with applications to single and multiple target tracking problems,” IEEE Trans. Rob., vol. 32, no. 5, pp. 1062–1078, Oct. 2016. doi: 10.1109/TRO.2016.2593044
|
| [14] |
T. Oliveira and P. Encarnação, “Ground target tracking control system for unmanned aerial vehicles,” J. Intell. Rob. Syst., vol. 6, no. 1, pp. 373–387, Jan. 2013.
|
| [15] |
T. Oliveira, A. P. Aguiar, and P. Encarnação, “Three dimensional moving path following for fixed-wing unmanned aerial vehicles,” in Proc. IEEE Int. Conf. Robotics and Automation, Singapore, 2017, pp. 2710–2716.
|
| [16] |
Y. Z. Wang, D. W. Wang, and S. Q. Zhu, “Cooperative moving path following for multiple fixed-wing unmanned aerial vehicles with speed constraints,” Automatica, vol. 100, pp. 82–89, Feb. 2019. doi: 10.1016/j.automatica.2018.11.004
|
| [17] |
M. F. Reis, R. P. Jain, A. P. Aguiar, and J. B. De Sousa, “Robust moving path following control for robotic vehicles: Theory and experiments,” IEEE Rob. Autom. Lett., vol. 4, no. 4, pp. 3192–3199, Oct. 2019. doi: 10.1109/LRA.2019.2925733
|
| [18] |
Y. A. Kapitanyuk, H. G. De Marina, A. V. Proskurnikov, and M. Cao, “Guiding vector field algorithm for a moving path following problem,” IFAC-PapersOnLine, vol. 50, no. 1, pp. 6983–6988, Jul. 2017. doi: 10.1016/j.ifacol.2017.08.1340
|
| [19] |
R. P. K. Jain, A. P. Aguiar, A. Alessandretti, and J. B. De Sousa, “Moving path following control of constrained underactuated vehicles: A nonlinear model predictive control approach,” in Proc. AIAA Information Systems-AIAA Infotech @ Aerospace, Kissimmee, USA, 2018.
|
| [20] |
K. P. Tee, S. S. Ge, and E. H. Tay, “Barrier Lyapunov functions for the control of output-constrained nonlinear systems,” Automatica, vol. 45, no. 4, pp. 918–927, Apr. 2009. doi: 10.1016/j.automatica.2008.11.017
|
| [21] |
K. P. Tee, B. B. Ren, and S. S. Ge, “Control of nonlinear systems with time-varying output constraints,” Automatica, vol. 47, no. 11, pp. 2511–2516, Nov. 2011. doi: 10.1016/j.automatica.2011.08.044
|
| [22] |
X. Jin, “Fault-tolerant iterative learning control for mobile robots non-repetitive trajectory tracking with output constraints,” Automatica, vol. 94, pp. 63–71, Aug. 2018. doi: 10.1016/j.automatica.2018.04.011
|
| [23] |
X. Jin, “Adaptive fixed-time control for MIMO nonlinear systems with asymmetric output constraints using universal barrier functions,” IEEE Trans. Autom. Control, vol. 64, no. 7, pp. 3046–3053, Jul. 2019. doi: 10.1109/TAC.2018.2874877
|
| [24] |
Z. W. Zheng and M. Feroskhan, “Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances,” IEEE/ASME Trans. Mechatron., vol. 22, no. 6, pp. 2564–2575, Dec. 2017. doi: 10.1109/TMECH.2017.2756110
|
| [25] |
Z. W. Zheng, “Moving path following control for a surface vessel with error constraint,” Automatica, vol. 118, p. 109040, Aug. 2020. doi: 10.1016/j.automatica.2020.109040
|
| [26] |
Z. Y. Guan, Y. P. Ma, and Z. W. Zheng, “Moving path following with prescribed performance and its application on automatic carrier landing,” IEEE Trans. Aerosp. Electron. Syst., vol. 56, no. 4, pp. 2576–2590, Aug. 2020. doi: 10.1109/TAES.2019.2948722
|
| [27] |
A. D. Ames, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs with application to adaptive cruise control,” in Proc. 53rd IEEE Conf. Decision and Control, Los Angeles, USA, 2014, pp. 6271–6278.
|
| [28] |
A. D. Ames, X. R. Xu, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs for safety critical systems,” IEEE Trans. Autom. Control, vol. 62, no. 8, pp. 3861–3876, Aug. 2017. doi: 10.1109/TAC.2016.2638961
|
| [29] |
X. R. Xu, “Constrained control of input-output linearizable systems using control sharing barrier functions,” Automatica, vol. 87, pp. 195–201, Jan. 2018. doi: 10.1016/j.automatica.2017.10.005
|
| [30] |
Q. Nguyen and K. Sreenath, “Exponential control barrier functions for enforcing high relative-degree safety-critical constraints,” in Proc. American Control Conf., Boston, USA, 2016, pp. 322–328.
|
| [31] |
X. R. Xu, J. W. Grizzle, P. Tabuada, and A. D. Ames, “Correctness guarantees for the composition of lane keeping and adaptive cruise control,” IEEE Trans. Autom. Sci. Eng., vol. 15, no. 3, pp. 1216–1229, Jul. 2018. doi: 10.1109/TASE.2017.2760863
|
| [32] |
D. L. Zheng, H. S. Wang, J. C. Wang, X. F. Zhang, and W. D. Chen, “Toward visibility guaranteed visual servoing control of quadrotor UAVs,” IEEE/ASME Trans. Mechatron., vol. 24, no. 3, pp. 1087–1095, Jun. 2019. doi: 10.1109/TMECH.2019.2906430
|
| [33] |
W. S. Cortez, D. Oetomo, C. Manzie, and P. Choong, “Control barrier functions for mechanical systems: Theory and application to robotic grasping,” IEEE Trans. Control Syst. Technol., vol. 29, no. 2, pp. 530–545, Mar. 2021. doi: 10.1109/TCST.2019.2952317
|
| [34] |
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control barrier functions: Theory and applications,” in Proc. 18th European Control Conf., Naples, Italy, 2019, pp. 3420–3431.
|
| [35] |
M. Egerstedt, J. N. Pauli, G. Notomista, and S. Hutchinson, “Robot ecology: Constraint-based control design for long duration autonomy,” Annu. Rev. Control, vol. 46, pp. 1–7, 2018. doi: 10.1016/j.arcontrol.2018.09.006
|
| [36] |
Z. Marvi and B. Kiumarsi, “Barrier-certified learning-enabled safe control design for systems operating in uncertain environments,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 3, pp. 437–449, Mar. 2022. doi: 10.1109/JAS.2021.1004347
|
| [37] |
W.-H. Chen, D. J. Ballance, P. J. Gawthrop, and J. O'Reilly, “A nonlinear disturbance observer for robotic manipulators,” IEEE Trans. Ind. Electron., vol. 47, no. 4, pp. 932–938, 2000. doi: 10.1109/41.857974
|
| [38] |
R. J. Hao, L. Tang, and X. Guan, “Observer-based robust control for the hexapod platform on the ultra-quiet spacecraft in the joint-task space,” Aerosp. Control Appl., vol. 45, no. 3, pp. 8–16, Jun. 2019.
|
| [39] |
J. H. She, K. Miyamoto, Q.-L. Han, M. Wu, H. Hashimoto, and Q.-G. Wang, “Generalized-extended-state-observer and equivalent-input-disturbance methods for active disturbance rejection: Deep observation and comparison,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 4, pp. 957–968, Apr. 2023. doi: 10.1109/JAS.2022.105929
|
| [40] |
J. C. Yuan, M. Zhu, X. Guo, and W. J. Lou, “Finite-time trajectory tracking control for a stratospheric airship with full-state constraint and disturbances,” J. Franklin Inst., vol. 358, no. 2, pp. 1499–1528, Jan. 2021. doi: 10.1016/j.jfranklin.2020.12.010
|
| [41] |
D. Ginoya, P. D. Shendge, and S. B. Phadke, “Sliding mode control for mismatched uncertain systems using an extended disturbance observer,” IEEE Trans. Ind. Electron., vol. 61, no. 4, pp. 1983–1992, Apr. 2014. doi: 10.1109/TIE.2013.2271597
|
| [42] |
J. Yang, C. J. Liu, M. Coombes, Y. D. Yan, and W.-H. Chen, “Optimal path following for small fixed-wing UAVs under wind disturbances,” IEEE Trans. Control Syst. Technol., vol. 29, no. 3, pp. 996–1008, May 2021. doi: 10.1109/TCST.2020.2980727
|
Figures(17) / Tables(1)






 DownLoad:
DownLoad: