A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 6
Volume 10
Issue 6
IEEE/CAA Journal of Automatica Sinica
| Citation: | J. S. Sang, D. Z. Ma, and Y. Zhou, “Group-consensus of hierarchical containment control for linear multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 6, pp. 1462–1474, Jun. 2023. doi: 10.1109/JAS.2023.123528

|
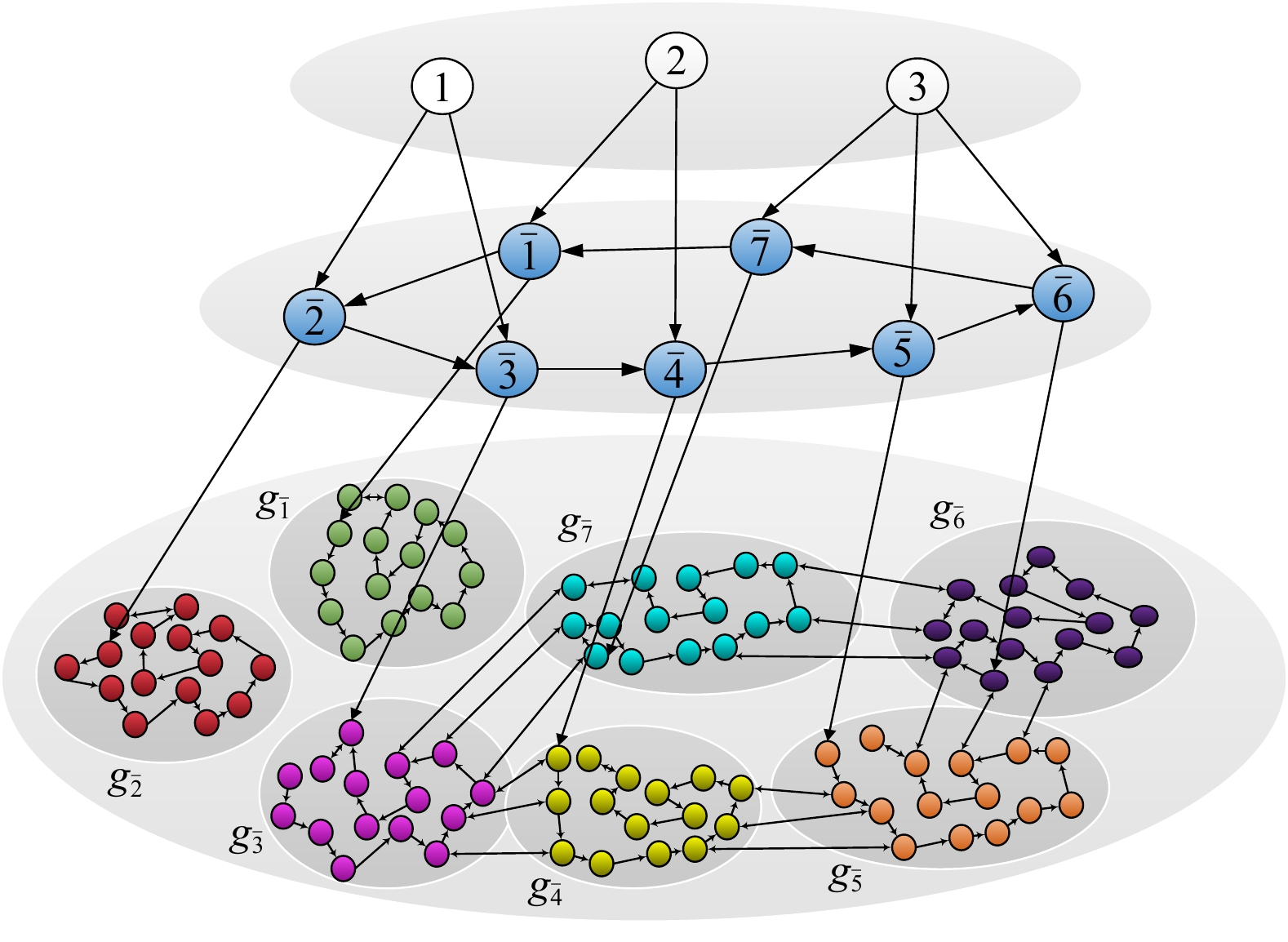
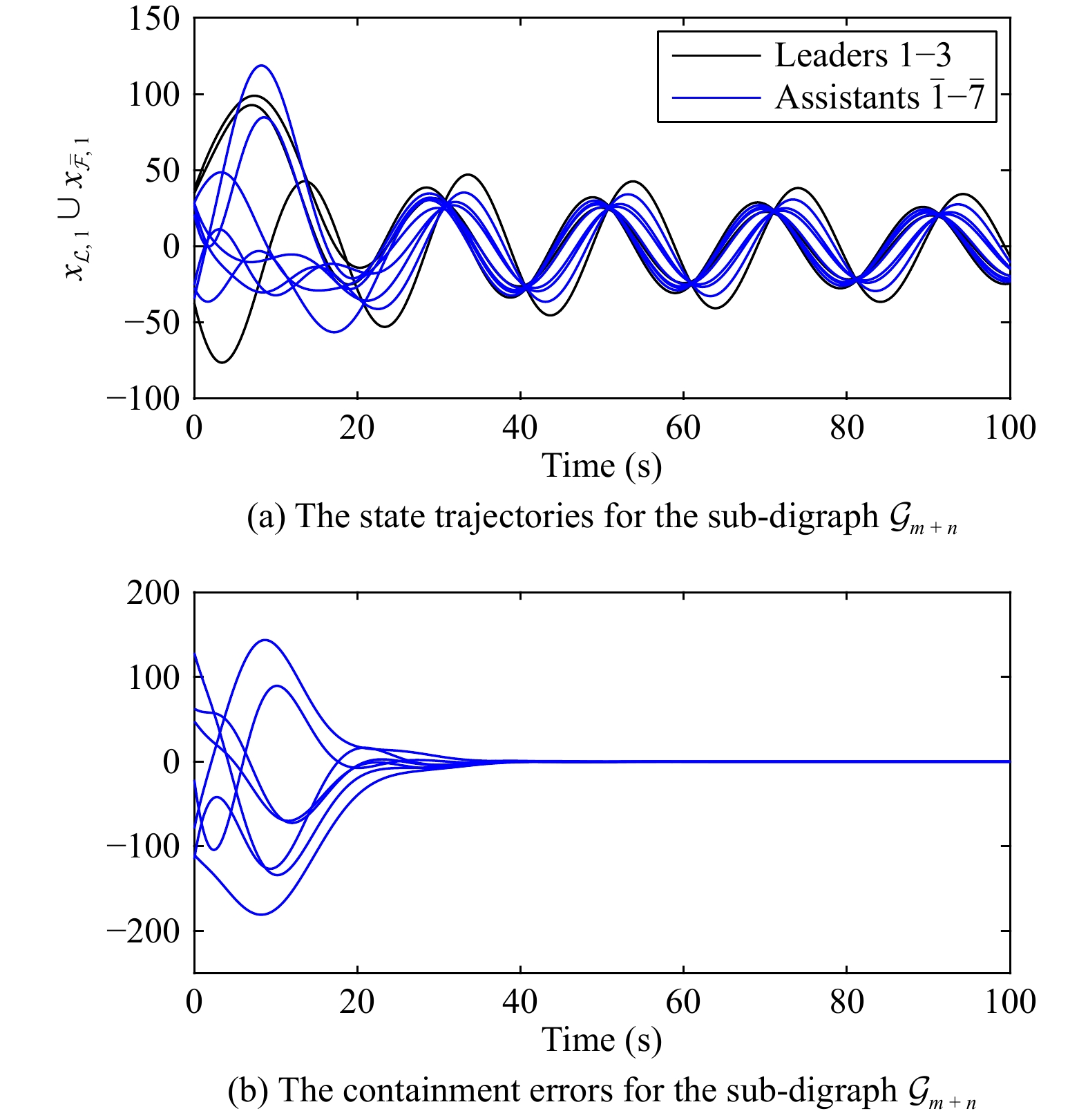
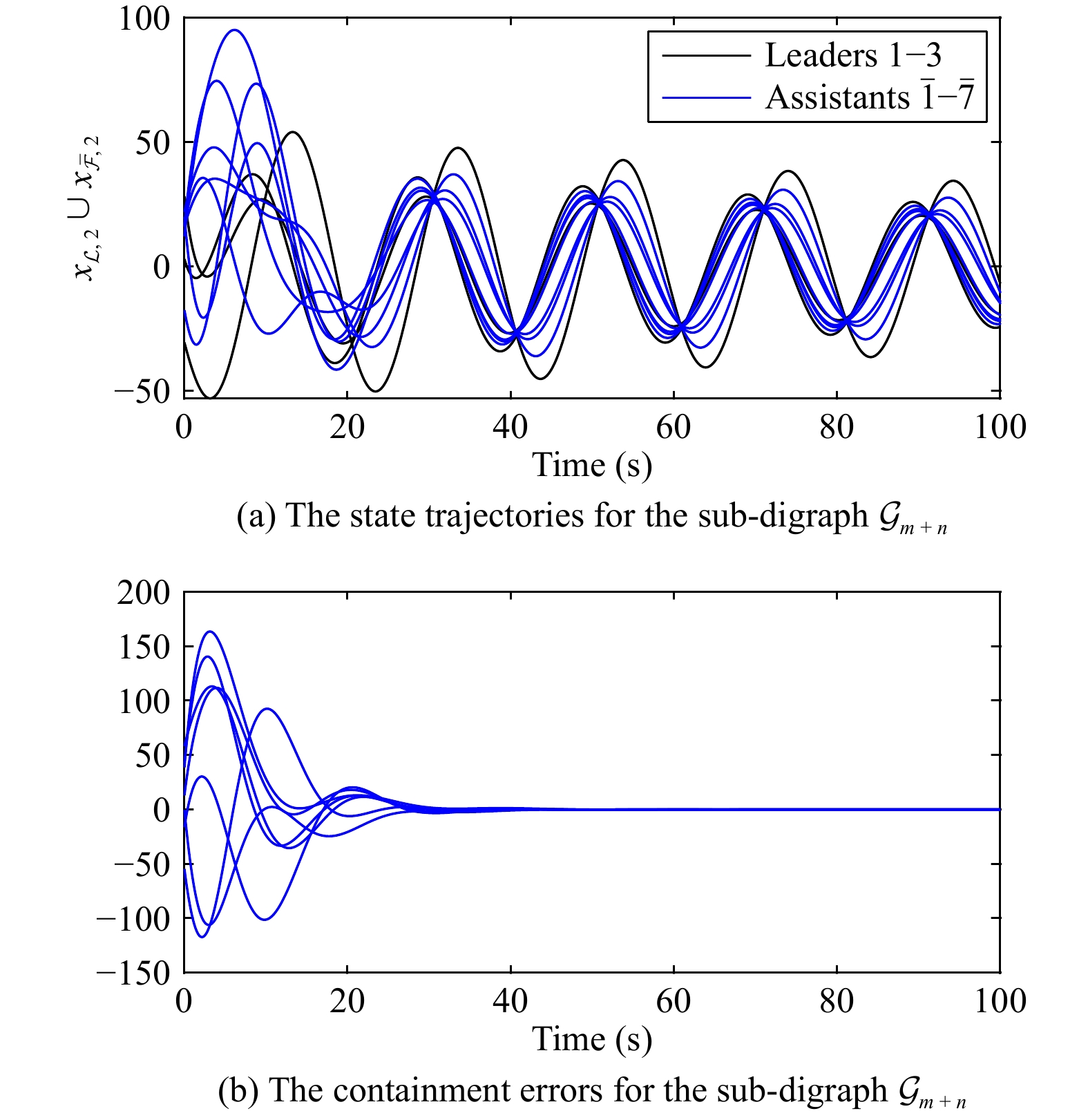
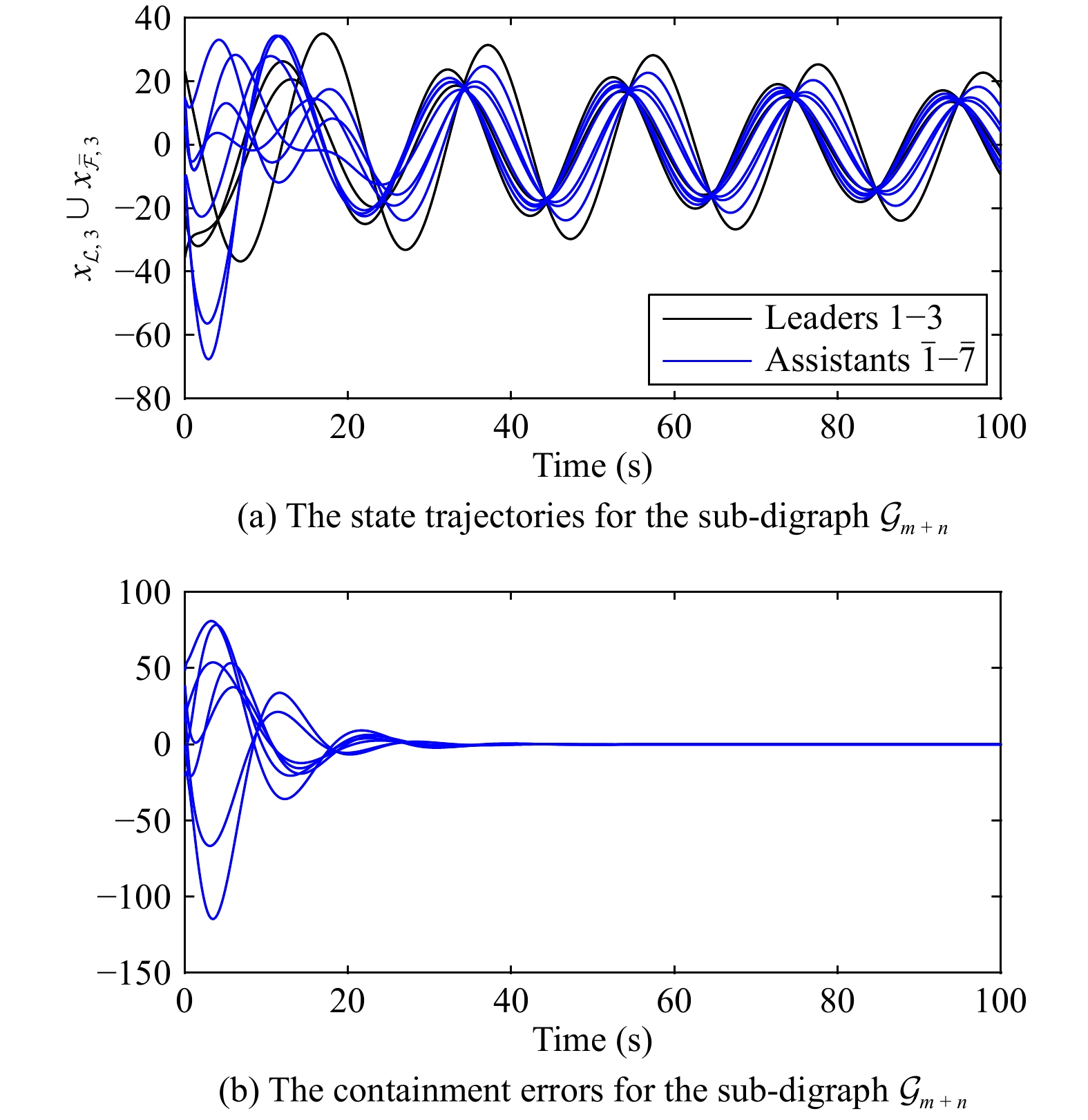
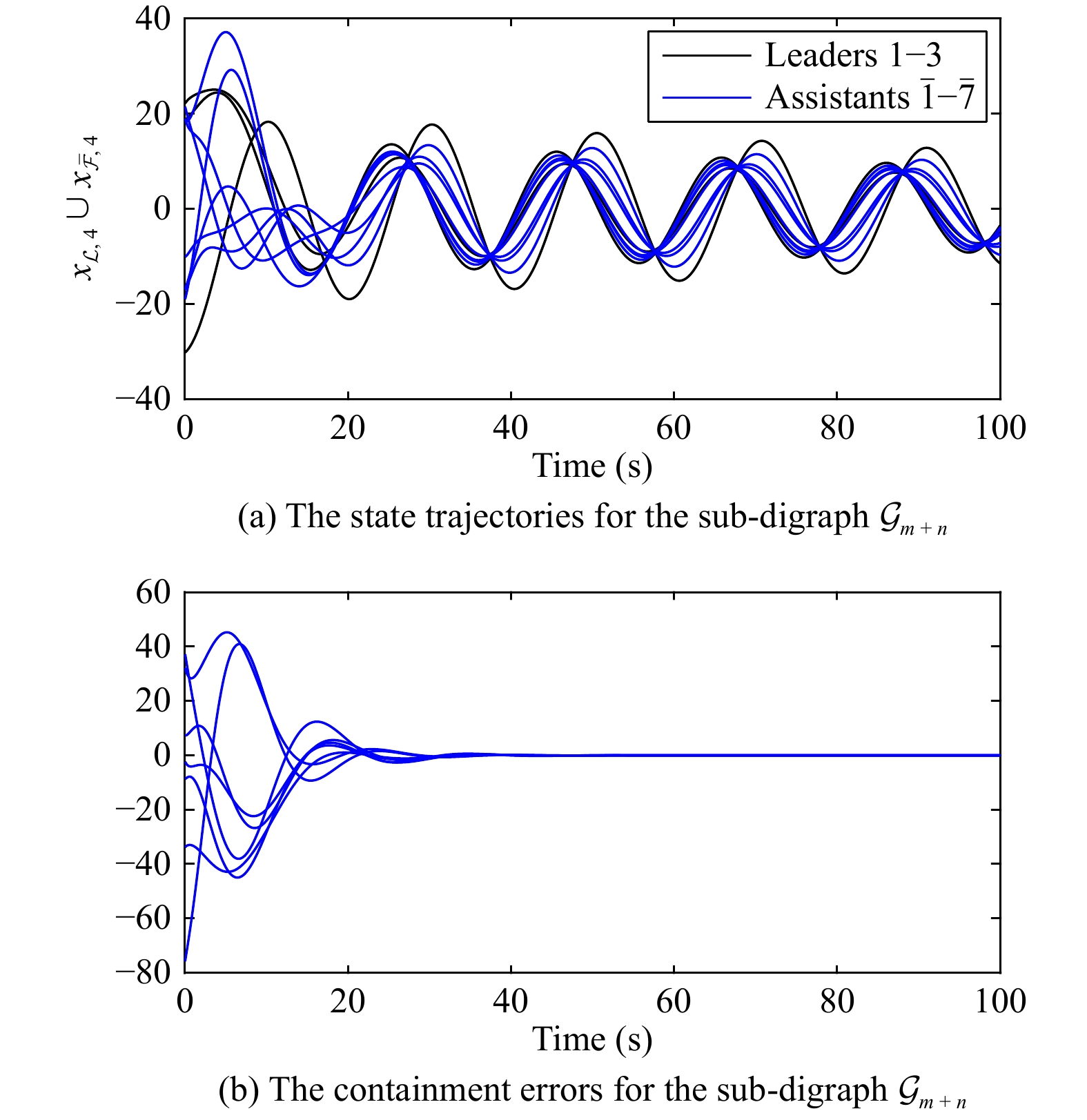
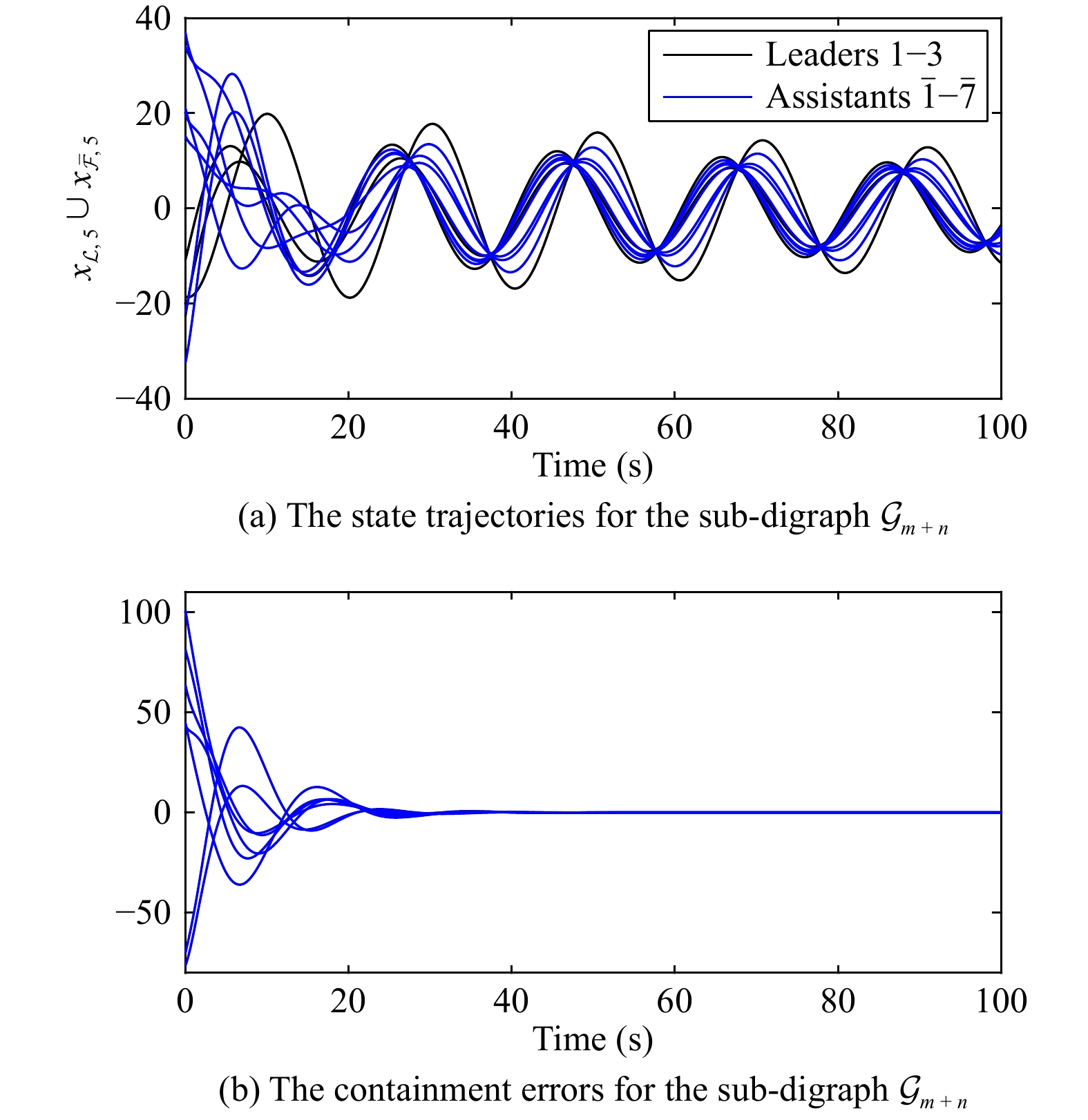
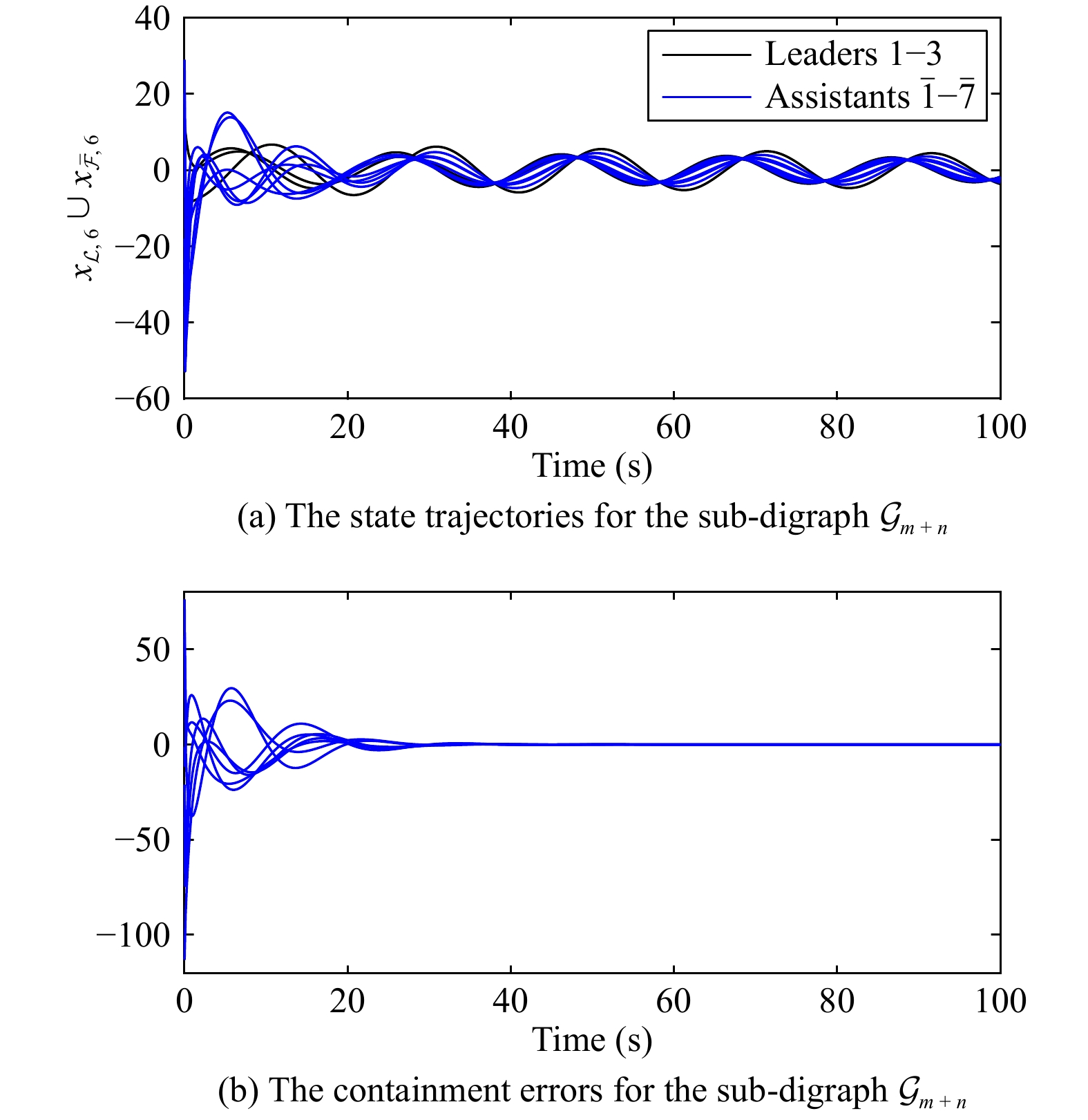
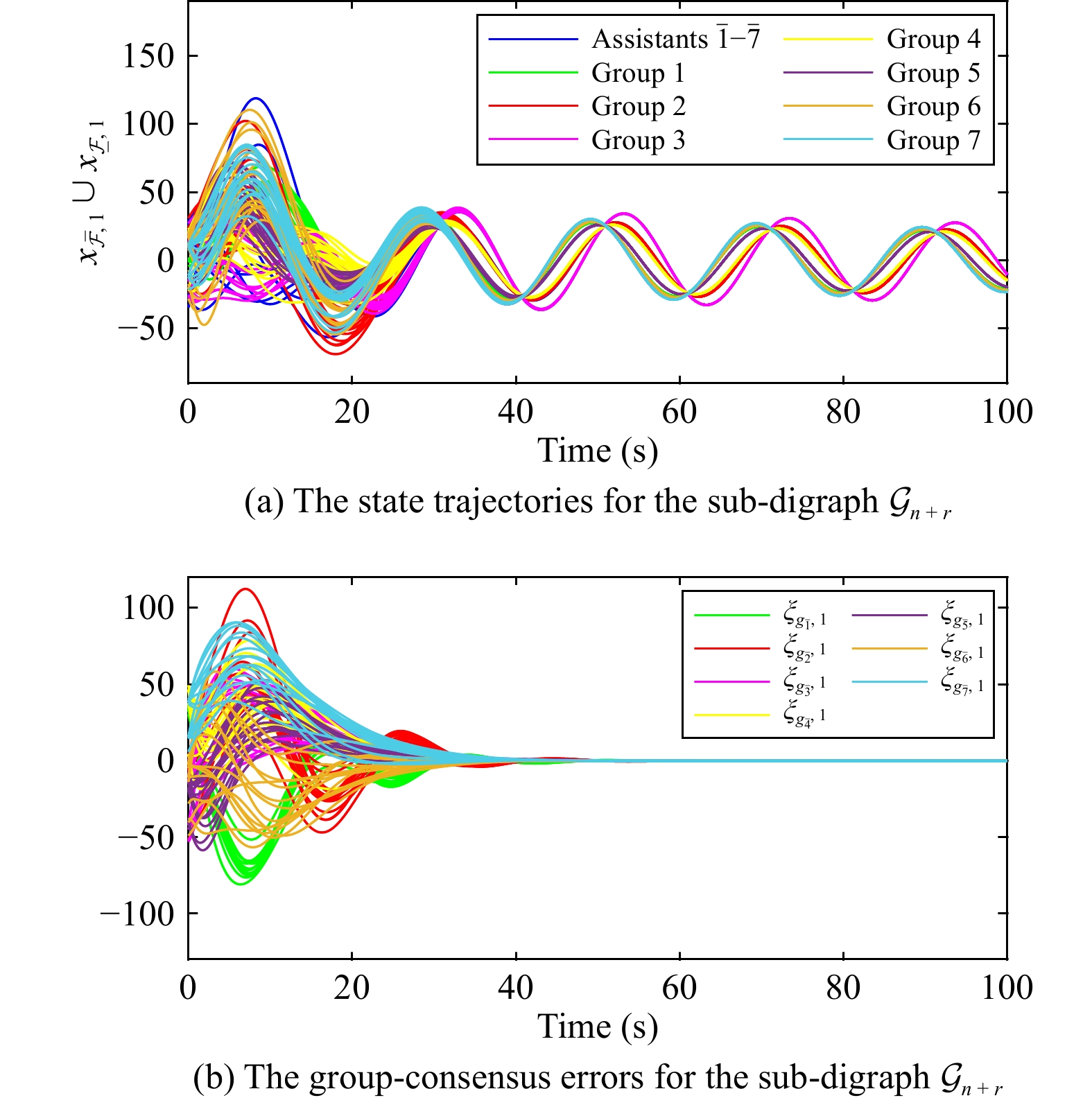
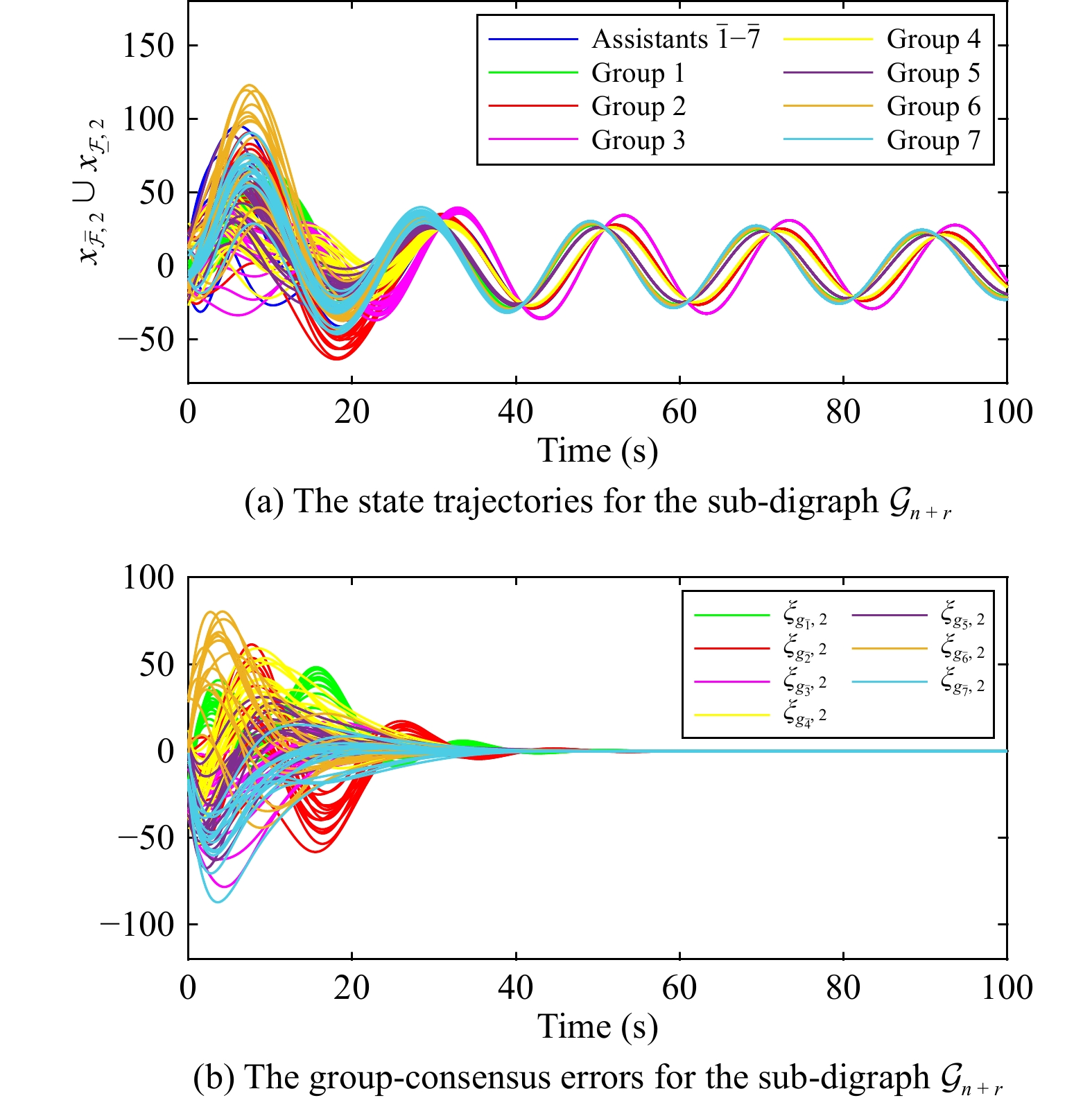
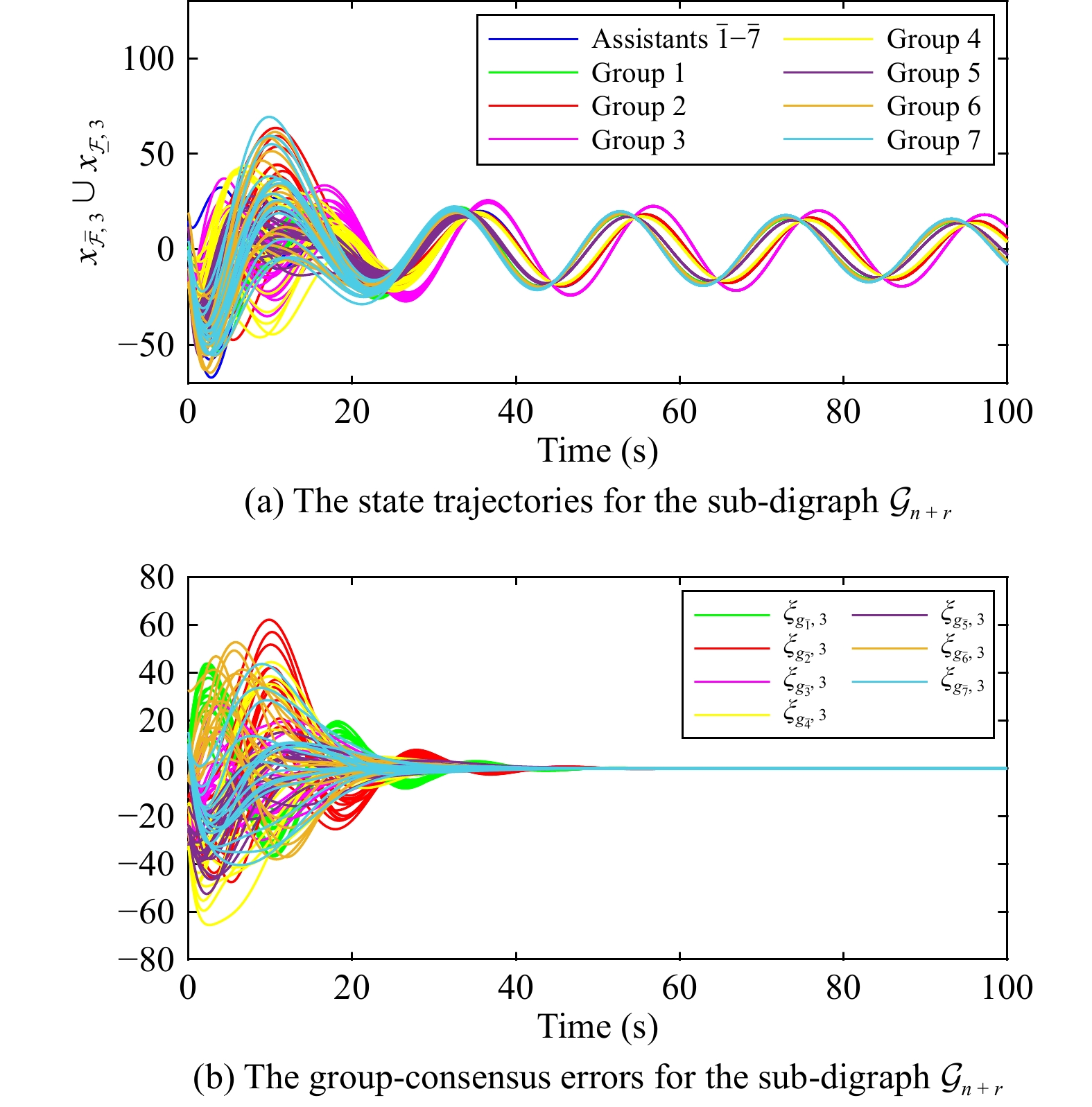
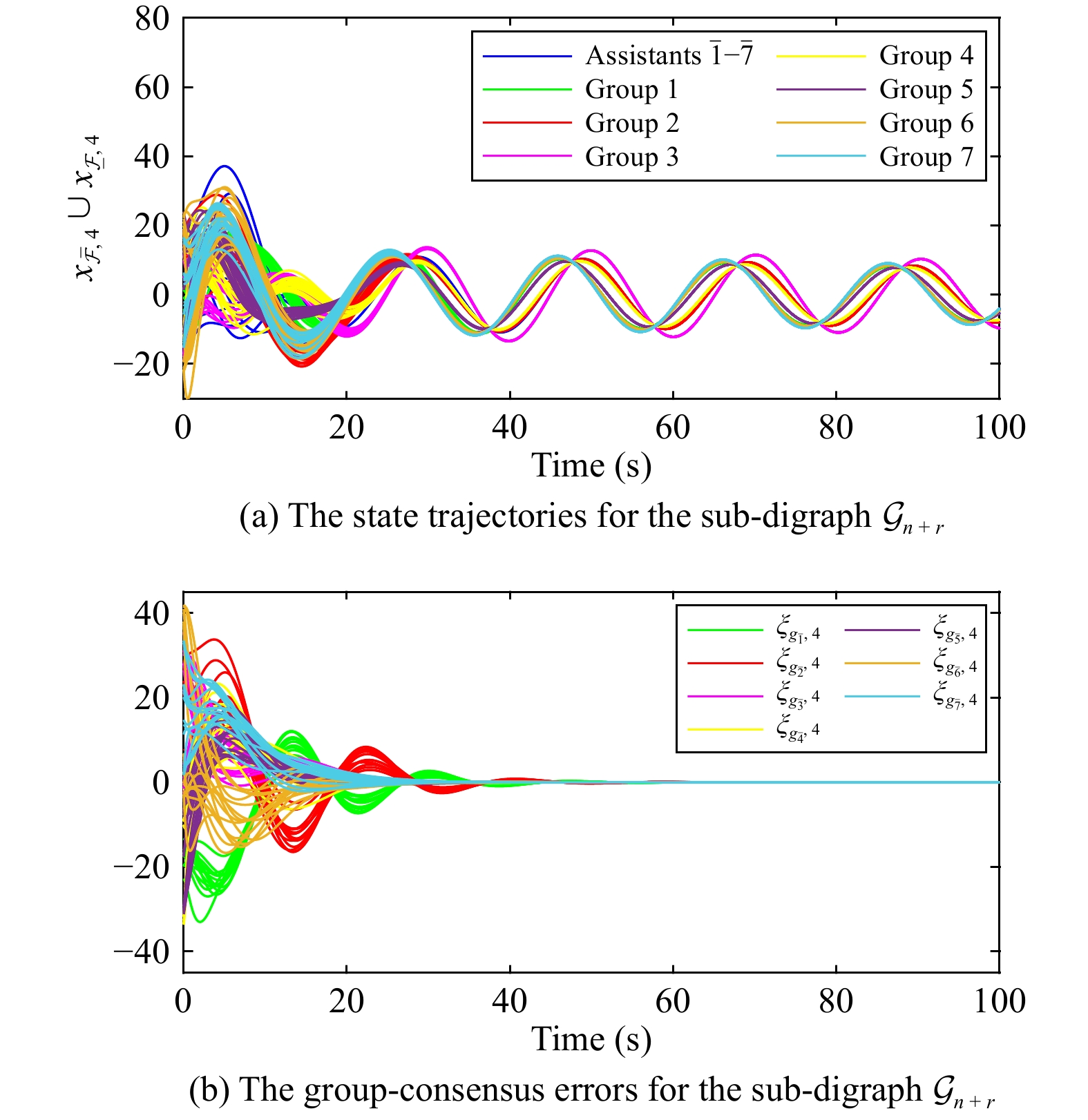
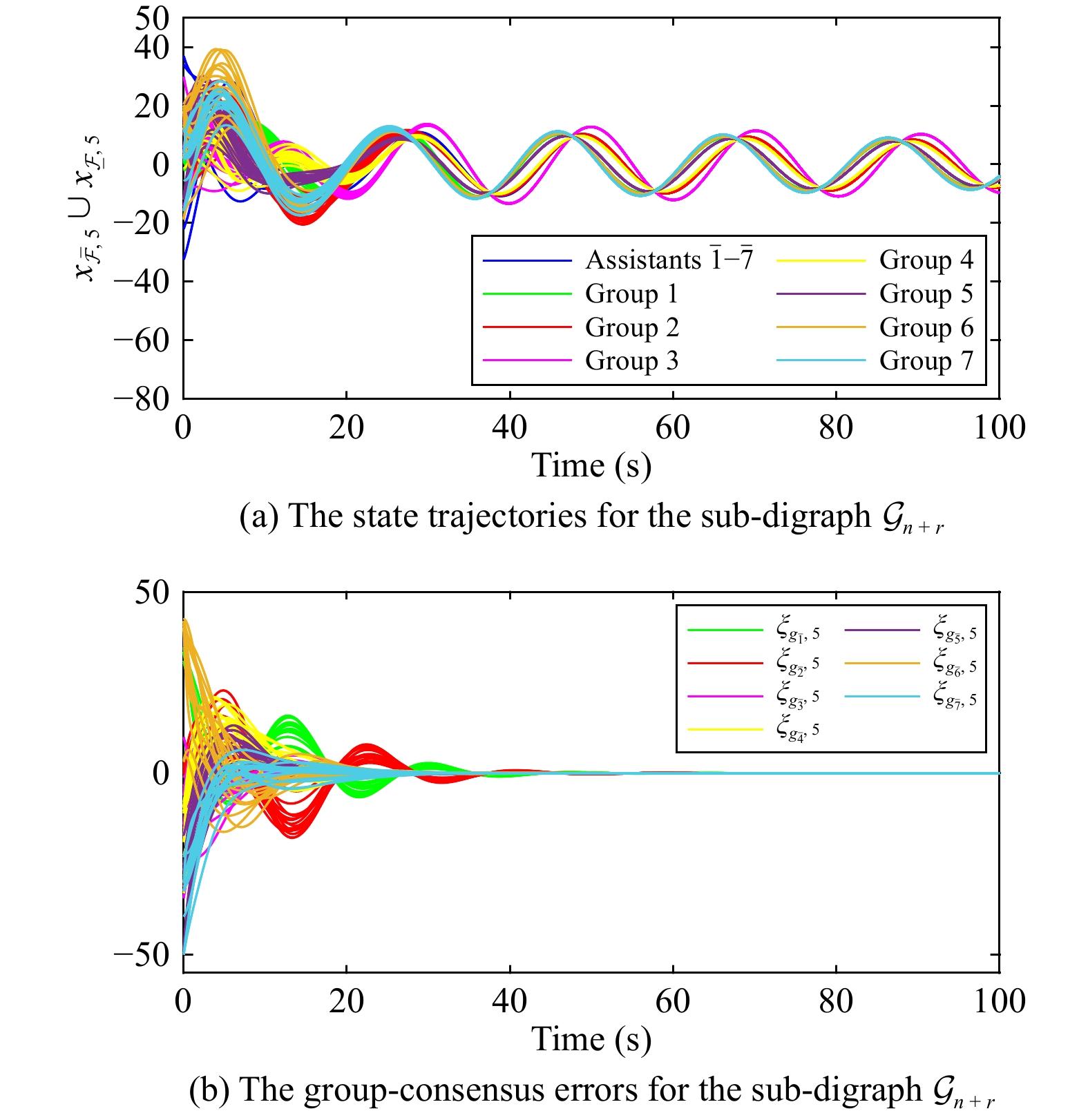
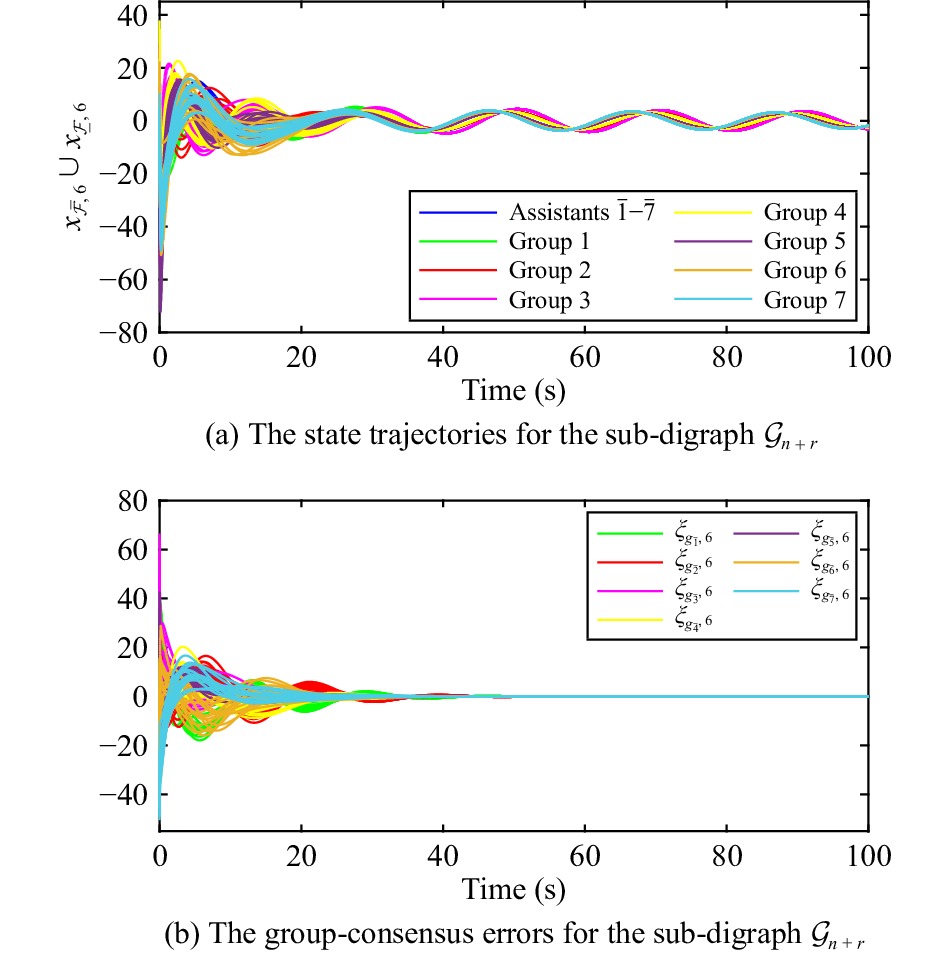
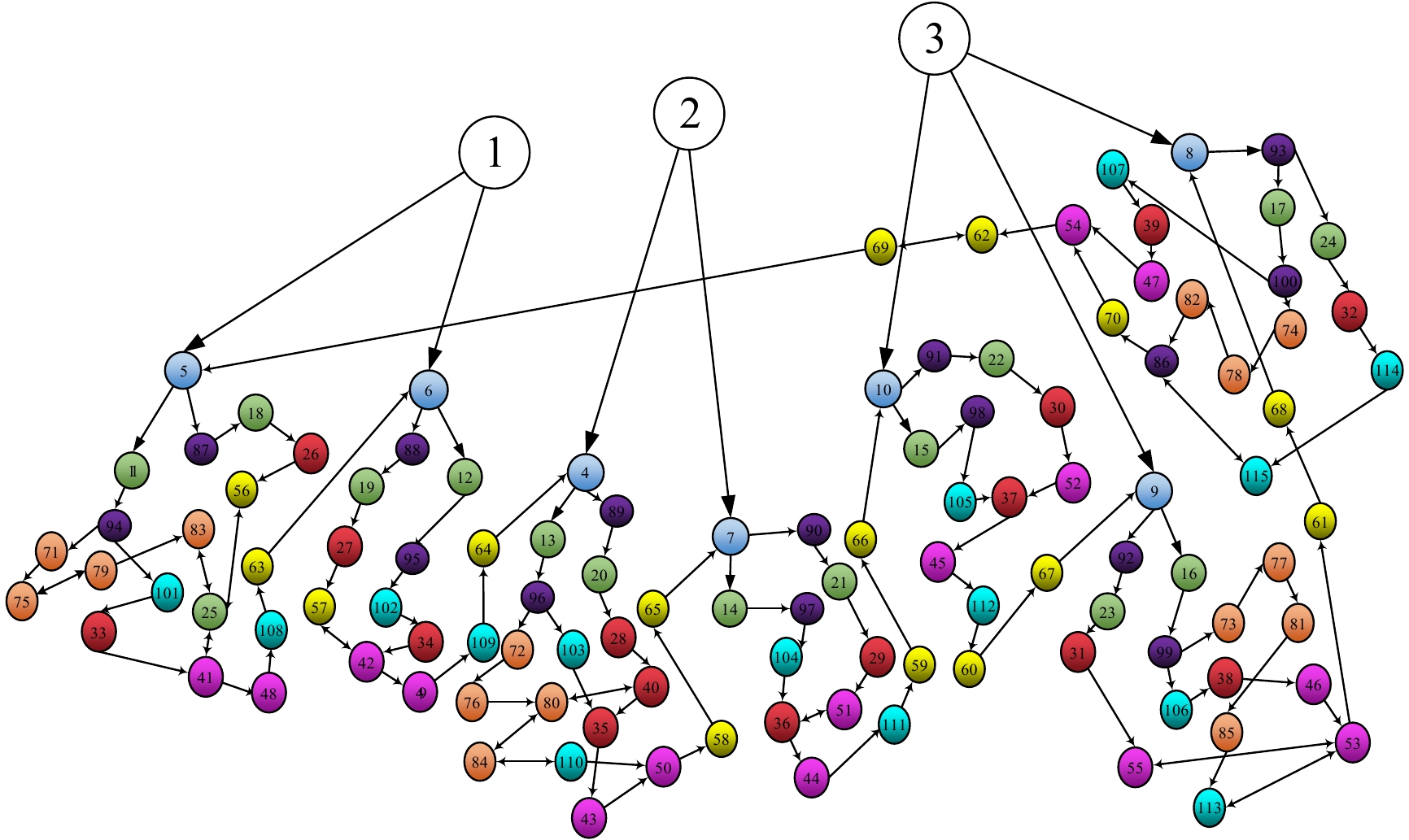
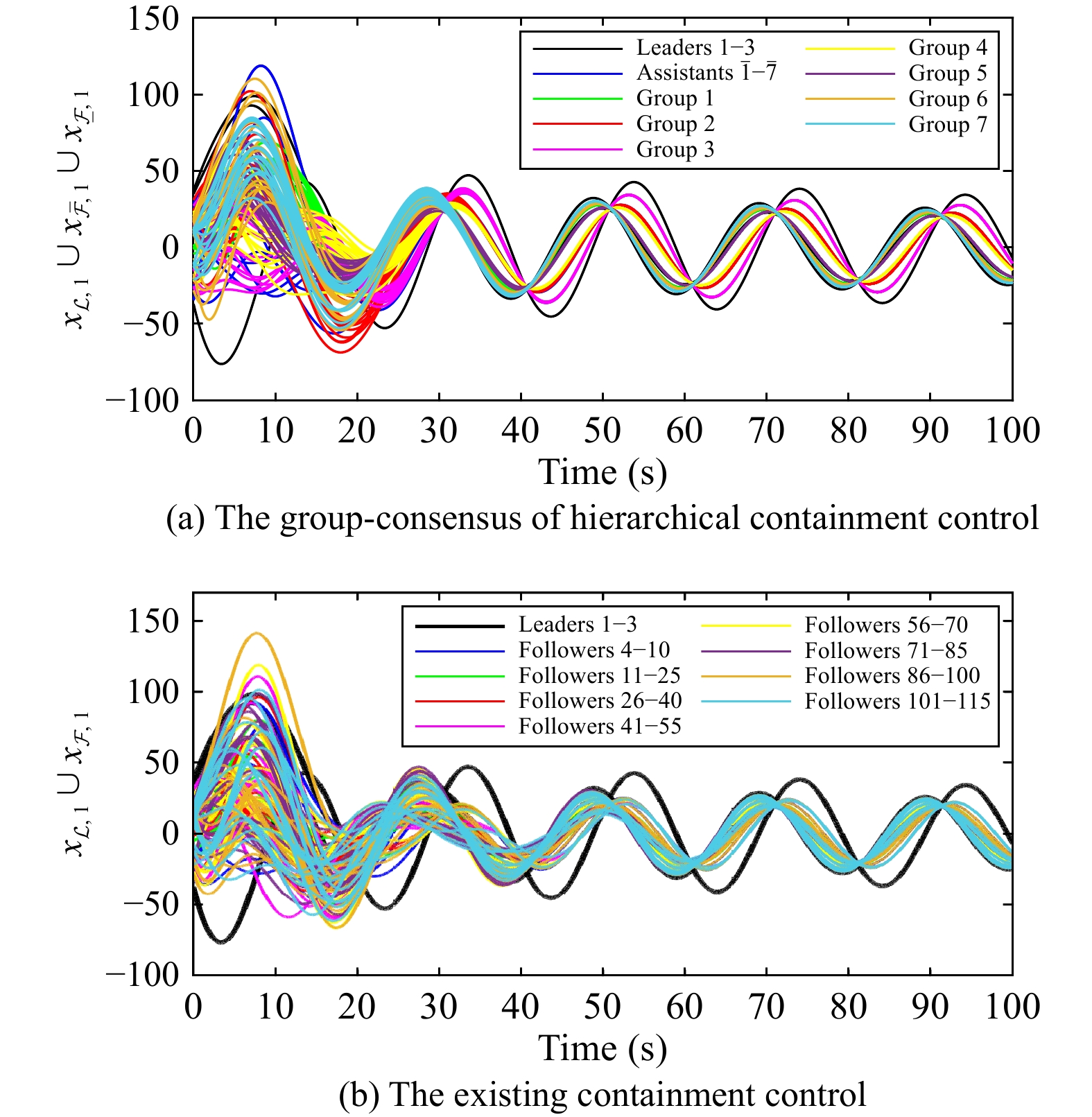
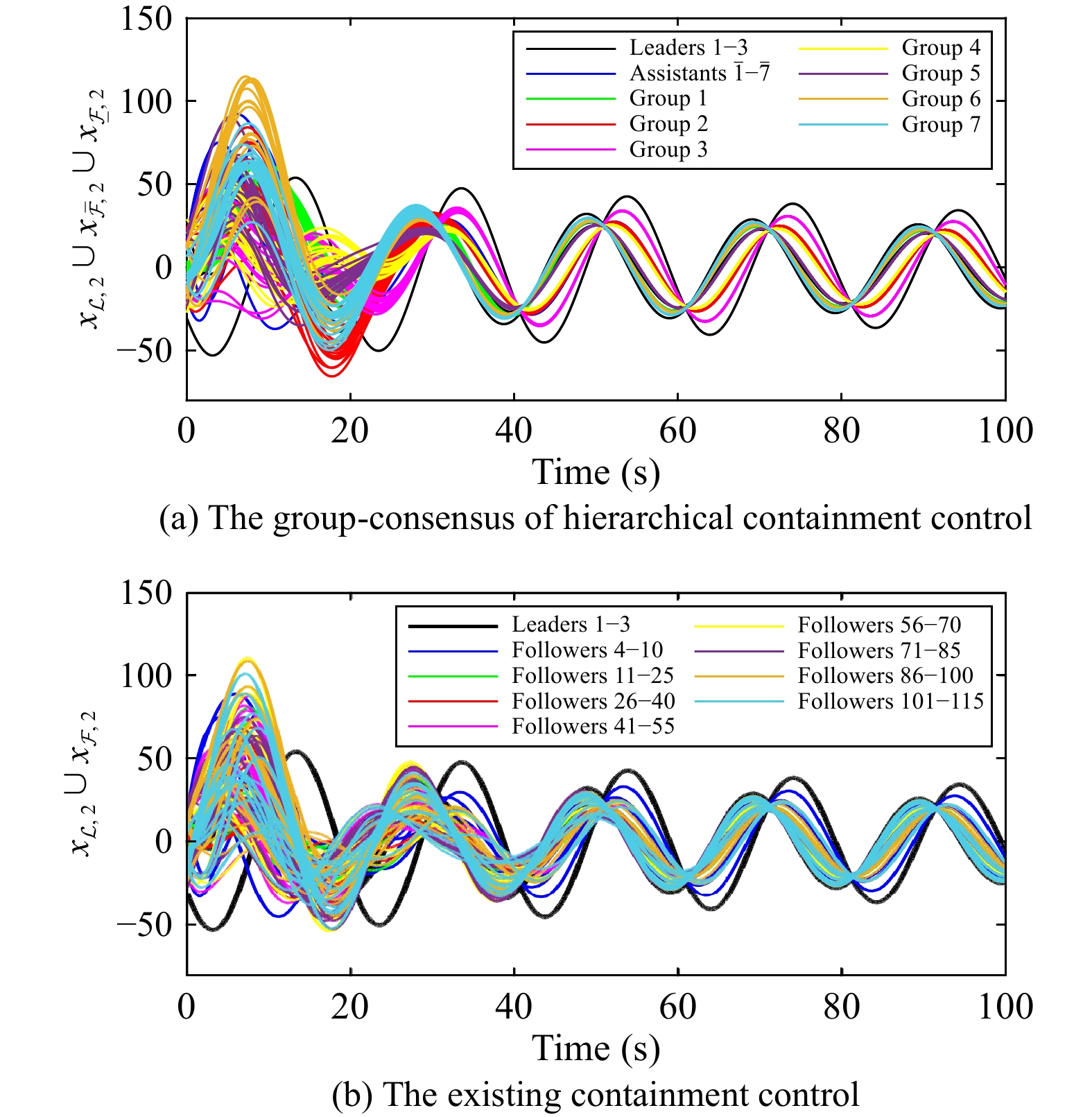
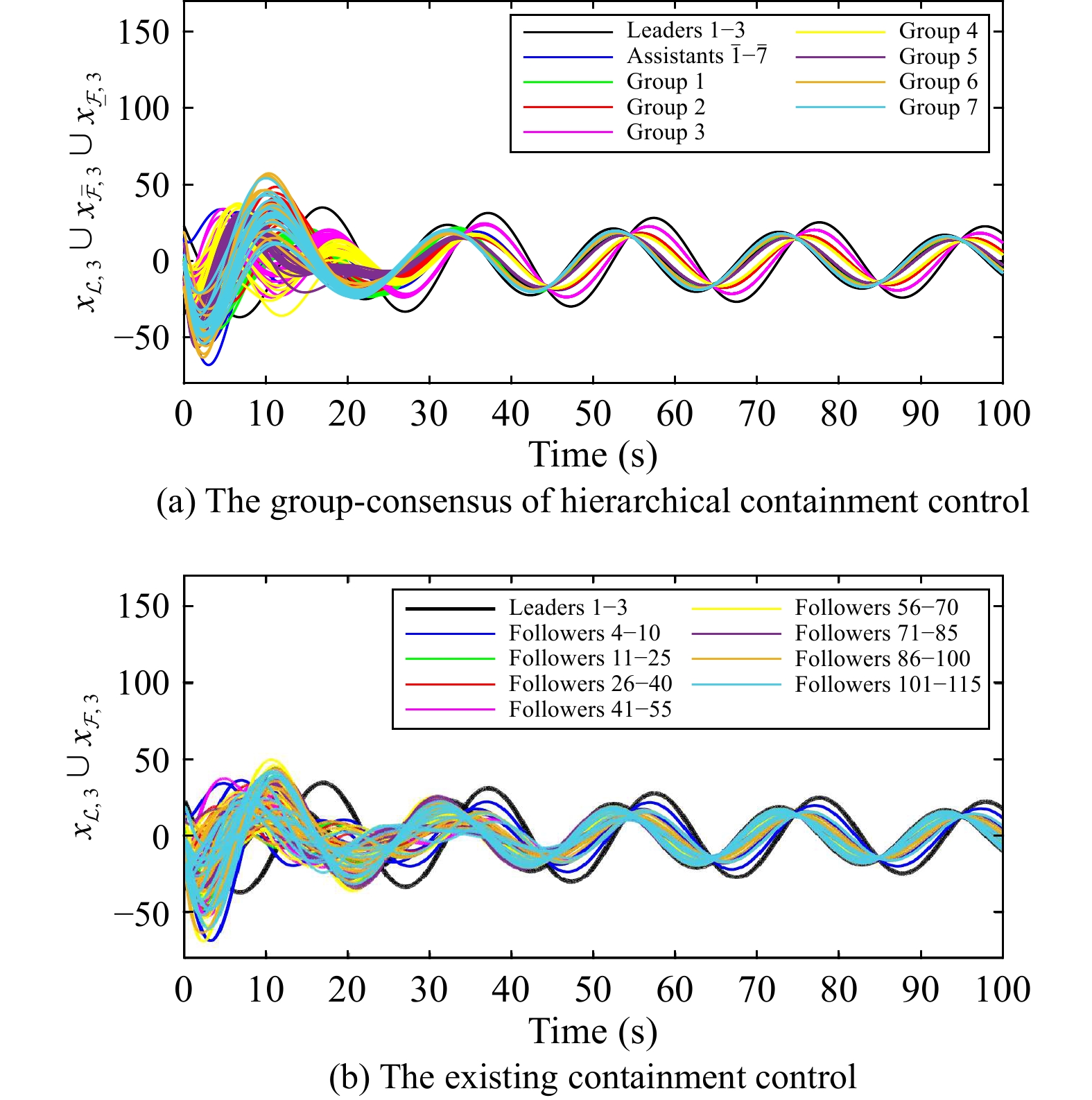
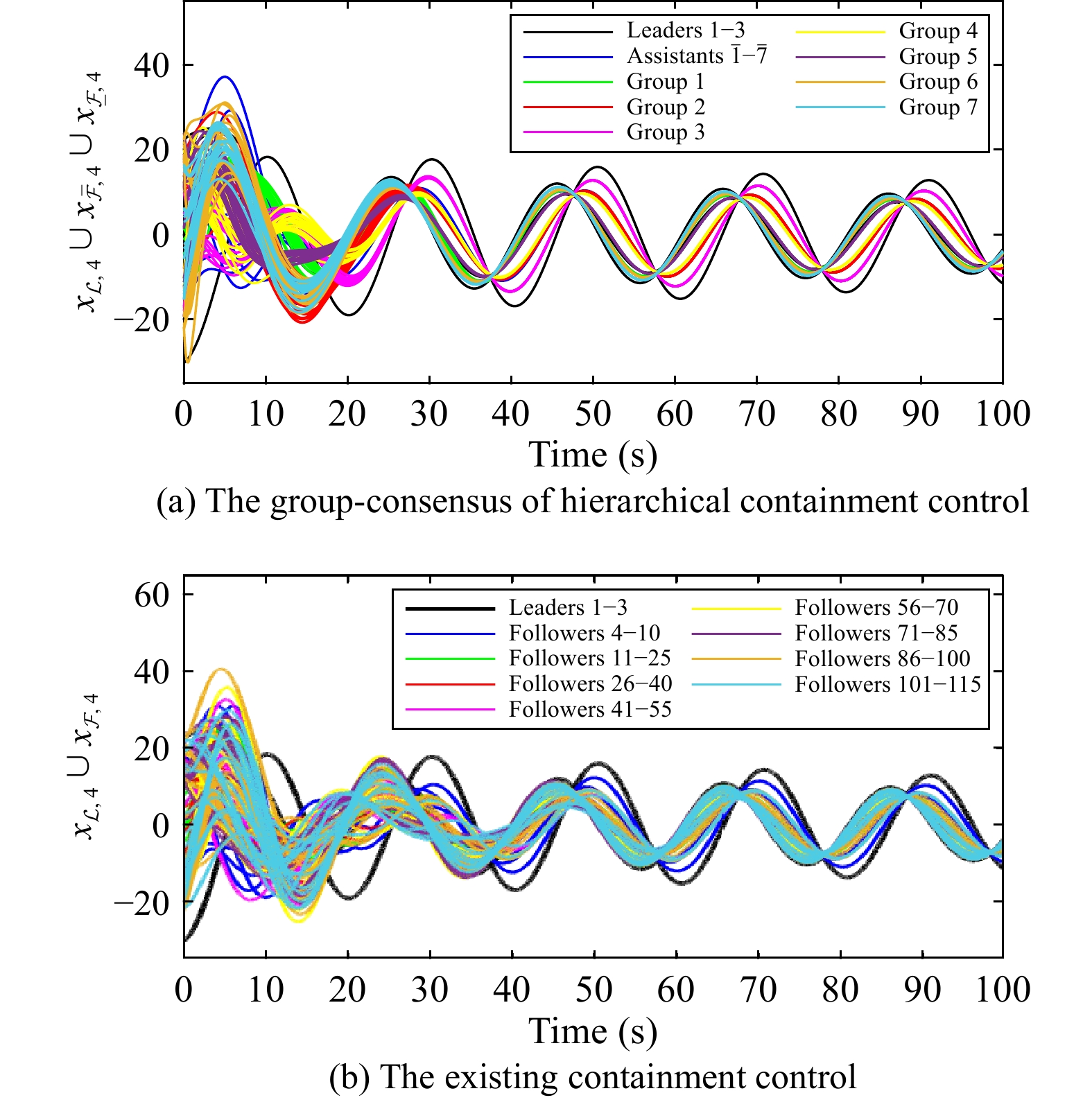
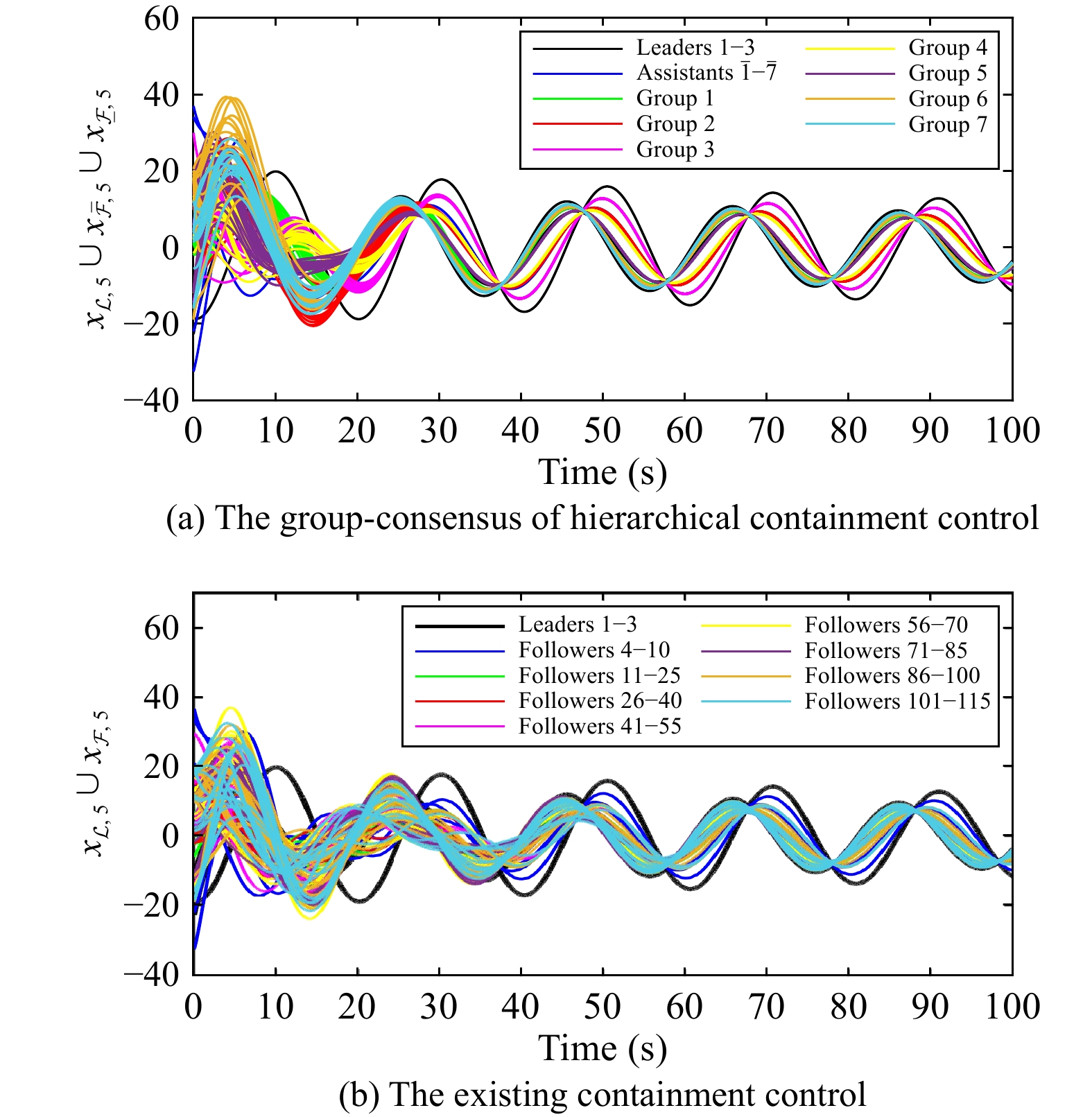
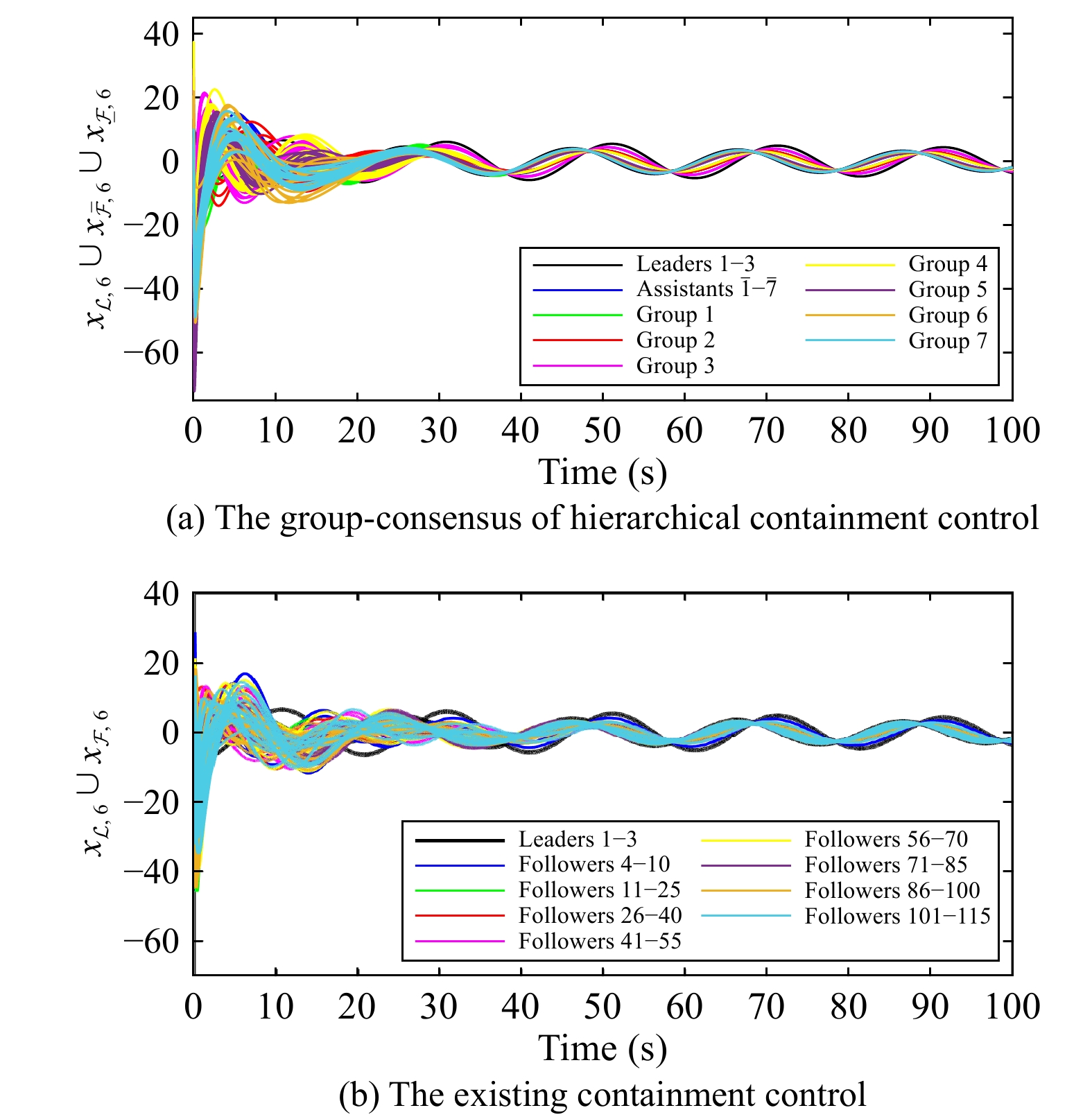
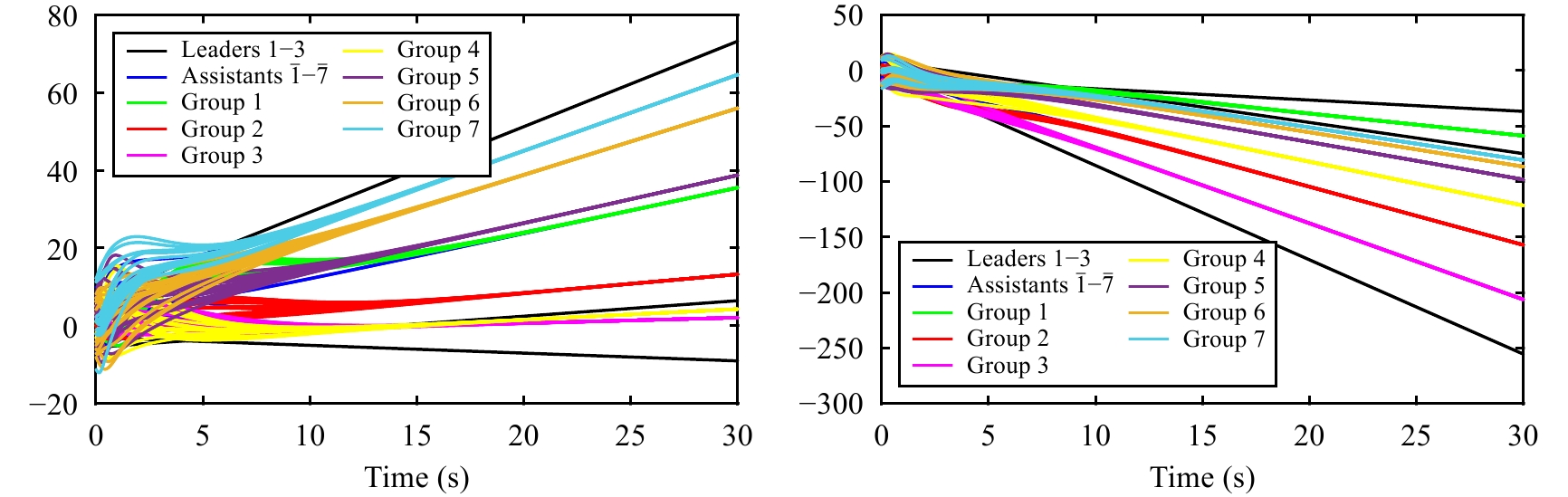
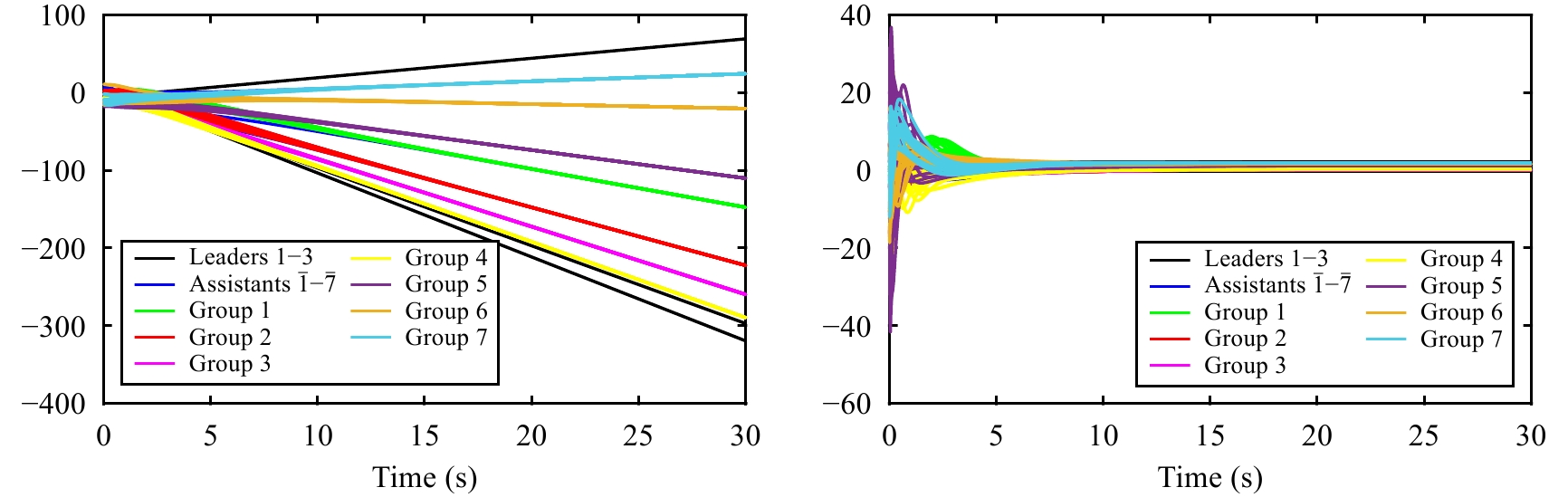
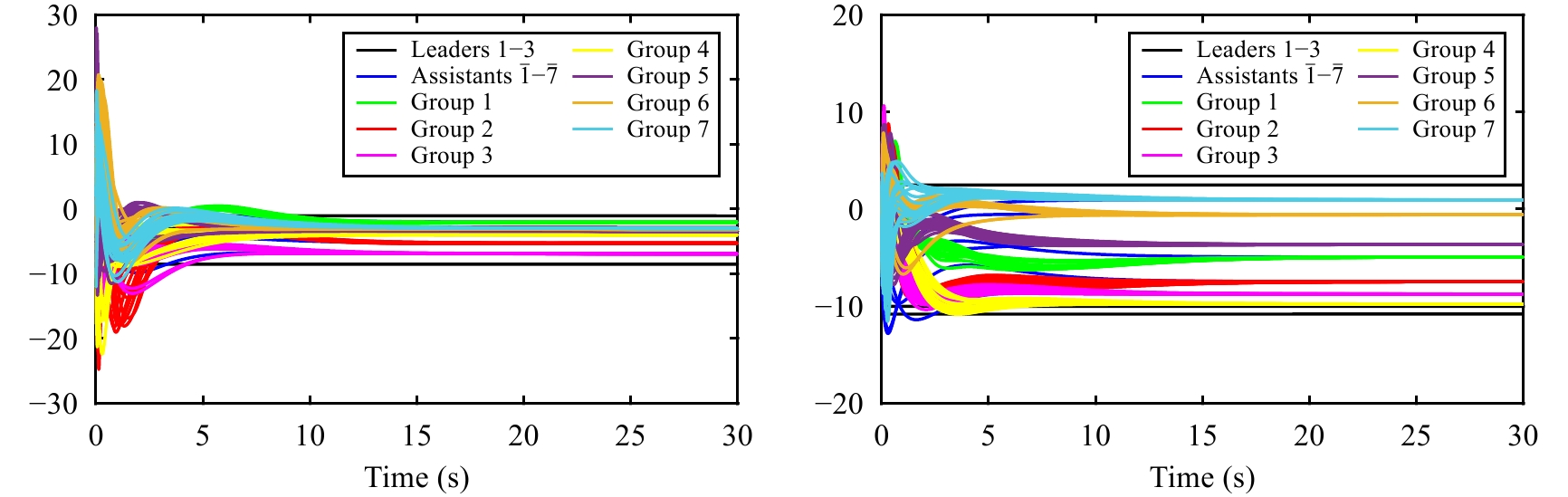
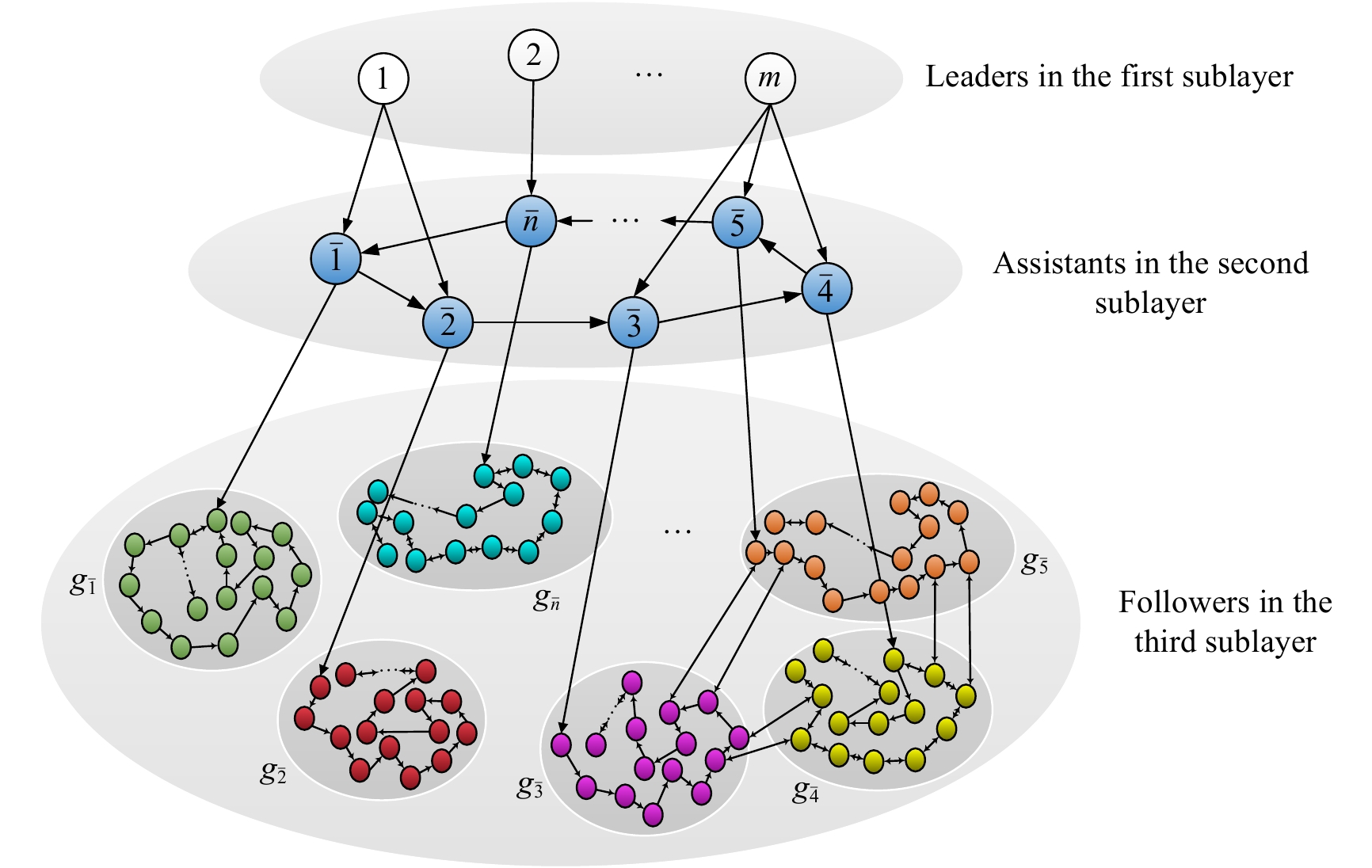
The existing containment control has been widely developed for several years, but ignores the case for large-scale cooperation. The strong coupling of large-scale networks will increase the costs of system detection and maintenance. Therefore, this paper is concerned with an extensional containment control issue, hierarchical containment control. It aims to enable a multitude of followers achieving a novel cooperation in the convex hull shaped by multiple leaders. Firstly, by constructing the three-layer topology, large-scale networks are decoupled. Then, under the condition of directed spanning group-tree, a class of dynamic hierarchical containment control protocol is designed such that the novel group-consensus behavior in the convex hull can be realized. Moreover, the definitions of coupling strength coefficients and the group-consensus parameter in the proposed dynamic hierarchical control protocol enhance the adjustability of systems. Compared with the existing containment control strategy, the proposed hierarchical containment control strategy improves dynamic control performance. Finally, numerical simulations are presented to demonstrate the effectiveness of the proposed hierarchical control protocol.

| [1] |
W. Li, H. Zhang, Y. Zhou, and Y. Wang, “Bipartite formation tracking for multi-agent systems using fully distributed dynamic edge-event-triggered protocol,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 847–853, May 2022. doi: 10.1109/JAS.2021.1004377
|
| [2] |
Y. Cai, H. Zhang, J. Zhang, R. Xi, and Q. He, “Fully distributed bipartite time-varying formation control for uncertain linear multi-agent systems under event-triggered mechanism,” Int. J. Robust and Nonlin. Contr., vol. 31, no. 11, pp. 5165–5187, Jul. 2021. doi: 10.1002/rnc.5532
|
| [3] |
X. Ge, Q.-L. Han, J. Wang, and X. Zhang, “A scalable adaptive approach to multi-vehicle formation control with obstacle avoidance,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 990–1004, Jun. 2022. doi: 10.1109/JAS.2021.1004263
|
| [4] |
Z. Li, Z. Duan, G, Chen, and L. Huang, “Consensus of multiagent systems and sychronization of complex networks: A unified viewpoint,” IEEE/CAA J. Autom. Sinica, vol. 57, no. 1, pp. 213–224, Jan. 2010.
|
| [5] |
X. Ge, Q.-L. Han, and X. Zhang, “Achieving cluster formation of multi-agent systems under aperiodic sampling and communication delays,” IEEE Trans. Ind. Electron., vol. 65, no. 4, pp. 3417–3426, Apr. 2018. doi: 10.1109/TIE.2017.2752148
|
| [6] |
J. Qin, Q. Ma, Y. Shi, and L. Wang, “Recent advances in consensus of multi-agent systems: A brief survey,” IEEE Trans. Ind. Electron., vol. 64, no. 6, pp. 4972–4983, Jun. 2017. doi: 10.1109/TIE.2016.2636810
|
| [7] |
Y. Wang, Z. Ma, and G. Chen, “Avoiding congestion in cluster consensus of the second-order nonlinear multiagent systems,” IEEE Trans. Neural. Netw. Learn. Syst., vol. 29, no. 8, pp. 3490–3498, Aug. 2018. doi: 10.1109/TNNLS.2017.2726354
|
| [8] |
D. Ma, X. Hu, H. Zhang, Q. Sun, and X. Xie, “A hierarchical event detection method based on spectral theory of multidimensional matrix for power system,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 51, no. 4, pp. 2173–2186, Apr. 2021. doi: 10.1109/TSMC.2019.2931316
|
| [9] |
X. Lu, J. Lai, X. Yu, Y. Wang, and J. M. Guerrero, “Distributed coordination of island microgrid clusters using a two-layer intermittent communication network,” IEEE Trans. Industr. Informat., vol. 14, no. 9, pp. 3956–3969, Sept. 2018. doi: 10.1109/TII.2017.2783334
|
| [10] |
X. Lu, J. Lai, and X. Yu, “A novel secondary power management strategy for multiple AC microgrids with cluster-oriented two-layer cooperative framework,” IEEE Trans. Industr. Informat., vol. 17, no. 2, pp. 1483–1495, Feb. 2021. doi: 10.1109/TII.2020.2985905
|
| [11] |
Y. Mu, H. Zhang, Z. Gao, and J. Zhang, “A fuzzy Lyapunov function approach for fault estimation of T-S fuzzy fractional-order systems based on unknown input observer,” IEEE Trans. Syst., Man, Cybern., Syst., DOI: 10.1109/TSMC.2022.3196502, 2022
|
| [12] |
F. Lian, J. Moyne, and D. Tilbury, “Network design consideration for distributed control systems,” IEEE Contr. Syst. Technol., vol. 10, no. 2, pp. 297–307, Mar. 2002. doi: 10.1109/87.987076
|
| [13] |
P. Park, S. C. Ergen, C. Fischione, C. Lu, and K. H. Johansson, “Wireless network design for control systems: A survey,” IEEE Commun. Surveys Tuts., vol. 20, no. 2, pp. 978–1013, 2018. doi: 10.1109/COMST.2017.2780114
|
| [14] |
S. V. Buldyrev, R. Parshani, G. Paul, H. E. Stanley, and S. Havlin, “Catastrophic cascade of failures in interdependent networks,” Nature, vol. 464, no. 7291, pp. 1025–1028, Apr. 2010. doi: 10.1038/nature08932
|
| [15] |
S. Gómez, A. Díaz-Guilera, J. Gómez-Gardeñes, C. J. Pérez-Vicente, Y. Moreno, and A. Arenas, “Diffusion dynamics on multiplex networks,” Phys. Rev. Lett., vol. 110, no. 2, p. 028701, Jan. 2013. doi: 10.1103/PhysRevLett.110.028701
|
| [16] |
J. Hu, J. Cao, M. Ni, and W. Yu, “Topological interactive analysis of power system and its communication module: A complex network approach,” Phys. A,Statist. Mech. Appl., vol. 416, pp. 99–111, Dec. 2014. doi: 10.1016/j.physa.2014.08.015
|
| [17] |
L. Wang and B. Chen, “Distributed control for large-scale plug-in electric vehicle charging with a consensus algorithm,” Electron. Power Syst. Res., vol. 109, pp. 369–383, Jul. 2019. doi: 10.1016/j.ijepes.2019.02.020
|
| [18] |
C. Liu, B. Jiang, R. J. patton, and K. Zhang, “Hierarchical-structure-based fault estimation and fault-tolerant control for multiagent sysetms,” IEEE Trans. contr. Netw. Syst., vol. 6, no. 2, pp. 586–597, Jun. 2019. doi: 10.1109/TCNS.2018.2860460
|
| [19] |
J. Hu and J. Cao, “Hierarchical cooperative control for multiagent systems with switching directed topologies,” IEEE Trans. Neural. Netw. Learn. Syst., vol. 26, no. 10, pp. 2453–2463, Oct. 2015. doi: 10.1109/TNNLS.2014.2386858
|
| [20] |
W. Xu, G. Chen, and D. W. C. Ho, “A layered event-triggered consensus scheme,” IEEE Trans. Cybern., vol. 47, no. 8, pp. 2334–2340, Aug. 2017. doi: 10.1109/TCYB.2016.2571122
|
| [21] |
H. Shi, L. Wang, T. Chu, and F. Xiao, “Self-organization of general multi-agent systems with complex interactions,” in Proc. IEEE, Beijing, China, pp. 3203–3208, Oct. 2006.
|
| [22] |
C. Altafini, “Consensus problems on networks with antagonistic interactions,” IEEE Trans. Automat. Contr., vol. 58, no. 4, pp. 935–946, Apr. 2013. doi: 10.1109/TAC.2012.2224251
|
| [23] |
J. Yu and L. Wang, “Group consensus in multi-agent systems with switching topologies and communication delays,” Syst. Contr. Lett., vol. 59, no. 6, pp. 340–348, Jun. 2010. doi: 10.1016/j.sysconle.2010.03.009
|
| [24] |
J. Yu and L. Wang, “Group consensus of multi-agent systems with directed information exchange,” Int. J. Syst. Sci., vol. 43, no. 2, pp. 334–348, Feb. 2012. doi: 10.1080/00207721.2010.496056
|
| [25] |
Y. Feng, S. Xu, and B. Zhang, “Group consensus control for double-integrator dynamic multiagent systems with fixed communication topology,” Int. J. Robust and Nonlin. Contr., vol. 24, pp. 532–547, Oct. 2012.
|
| [26] |
J. Liu and J. Zhou, “Distributed impulsive group consensus in second-order multi-agent systems under directed topology,” Int. J. Contr., vol. 88, no. 5, pp. 910–919, 2015.
|
| [27] |
J. Qin, C. Yu, and B. D. O. Anderson, “On leaderless and leader-following consensus for interacting clusters of second-order multi-agent systems,” Automatica, vol. 74, pp. 214–221, Dec. 2016. doi: 10.1016/j.automatica.2016.07.008
|
| [28] |
M. Zhao, C. Peng, Q.-L. Han, and X. Zhang, “Cluster consensus of multiagent systems with weighted antagonistic interactions,” IEEE Trans. Cybern., vol. 51, no. 11, pp. 5609–5618, Nov. 2021. doi: 10.1109/TCYB.2020.2966083
|
| [29] |
X. Guo, P. Liu, J. Wang, and C. K. Ahn, “Event-triggered adaptive fault-tolerant pinning control for cluster consensus of heterogeneous nonlinear multi-agent systems under aperiodic DoS attacks,” IEEE Trans. Netw. Sci. Eng., vol. 8, no. 2, pp. 1941–1956, Jun. 2021. doi: 10.1109/TNSE.2021.3077766
|
| [30] |
Z. Li, W. Ren. X. Liu, and M. Fu, “Distributed containment control of multi-agent systems with general linear dynamics in the presence of multiple leaders,” Int. J. Robust and Nonlin. Contr., vol. 23, no. 5, pp. 534–547, Mar. 2013. doi: 10.1002/rnc.1847
|
| [31] |
Z. Li, Z. Duan, W. Ren, and G. Feng, “Containment control of linear multi-agent systems with multiple leaders of bounded inputs using distributed continuous controllers,” Int. J. Robust and Nonlin. Contr., vol. 25, no. 13, pp. 2101–2121, Sept. 2015. doi: 10.1002/rnc.3195
|
| [32] |
H. Liu, G. Xie, and L. Wang, “Necessary and sufficient condition for containment control of networked multi-agent systems,” Automatica, vol. 48, no. 7, pp. 1415–1422, Jul. 2012. doi: 10.1016/j.automatica.2012.05.010
|
| [33] |
H. Liang, Y. Zhou, and H. Zhang, “Containment control for singular multi-agent systems with an internal model compensator,” Inf. Sci., vol. 63, pp. 229202:1–229202:3, Dec. 2020. doi: 10.1007/s11432-018-9780-3
|
| [34] |
R. T. Rockafellar, Convex Analysis, 2nd ed.USA: Princeton University, 1972.
|
| [35] |
X. Liu and A. Goldsmith, “Wireless network design for distributed control,” in Proc. 43rd IEEE Int. Conf. Decision and Control, Atlantis, Bahamas, 2004, pp. 2823–2829.
|
Figures(24)






 DownLoad:
DownLoad: