A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 8
Volume 10
Issue 8
IEEE/CAA Journal of Automatica Sinica
| Citation: | Z. J. Zhao, J. Zhang, S. Y. Chen, W. He, and K.-S. Hong, “Neural-network-based adaptive finite-time control for a two-degree-of-freedom helicopter system with an event-triggering mechanism,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 8, pp. 1754–1765, Aug. 2023. doi: 10.1109/JAS.2023.123453

|
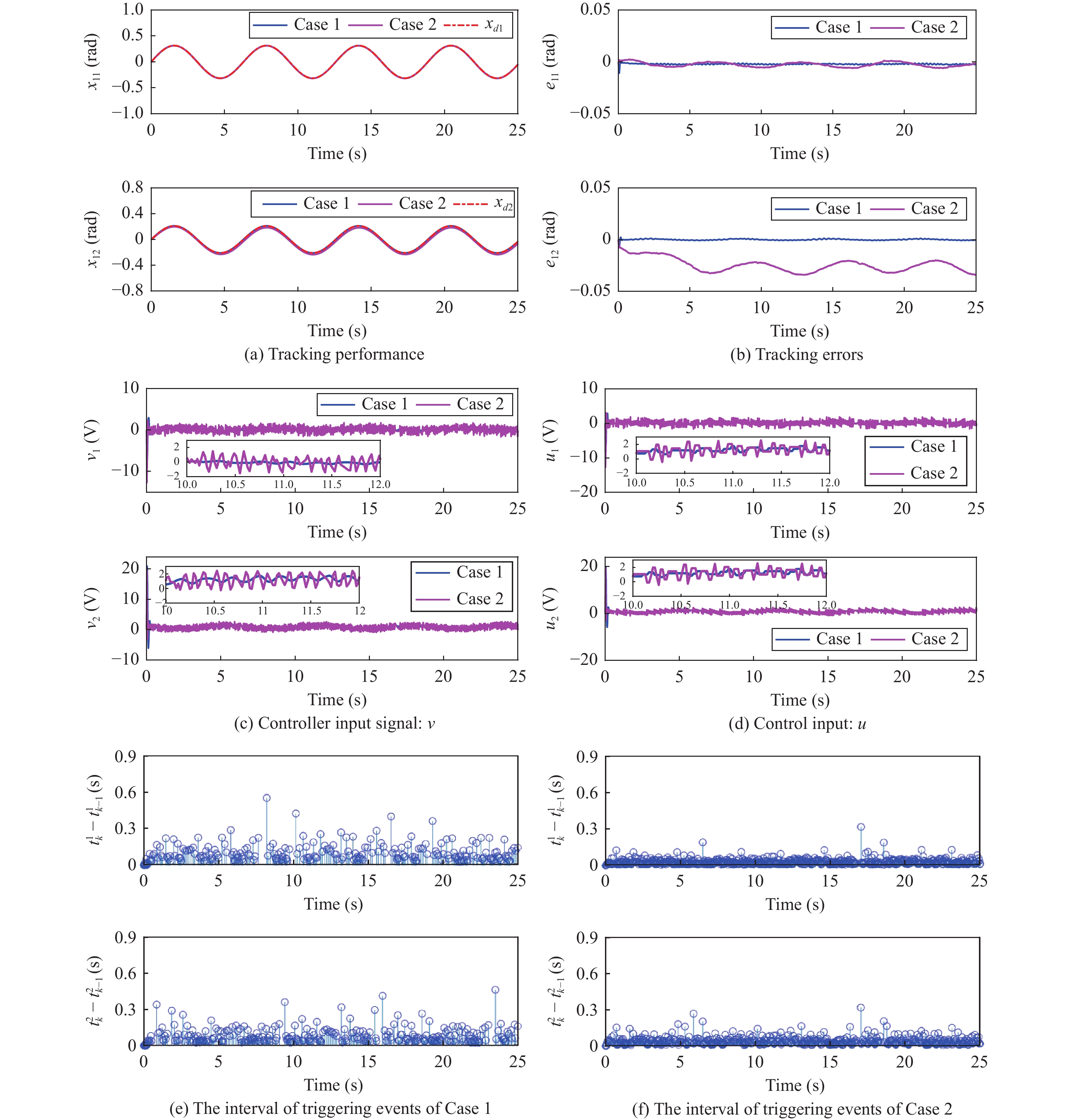
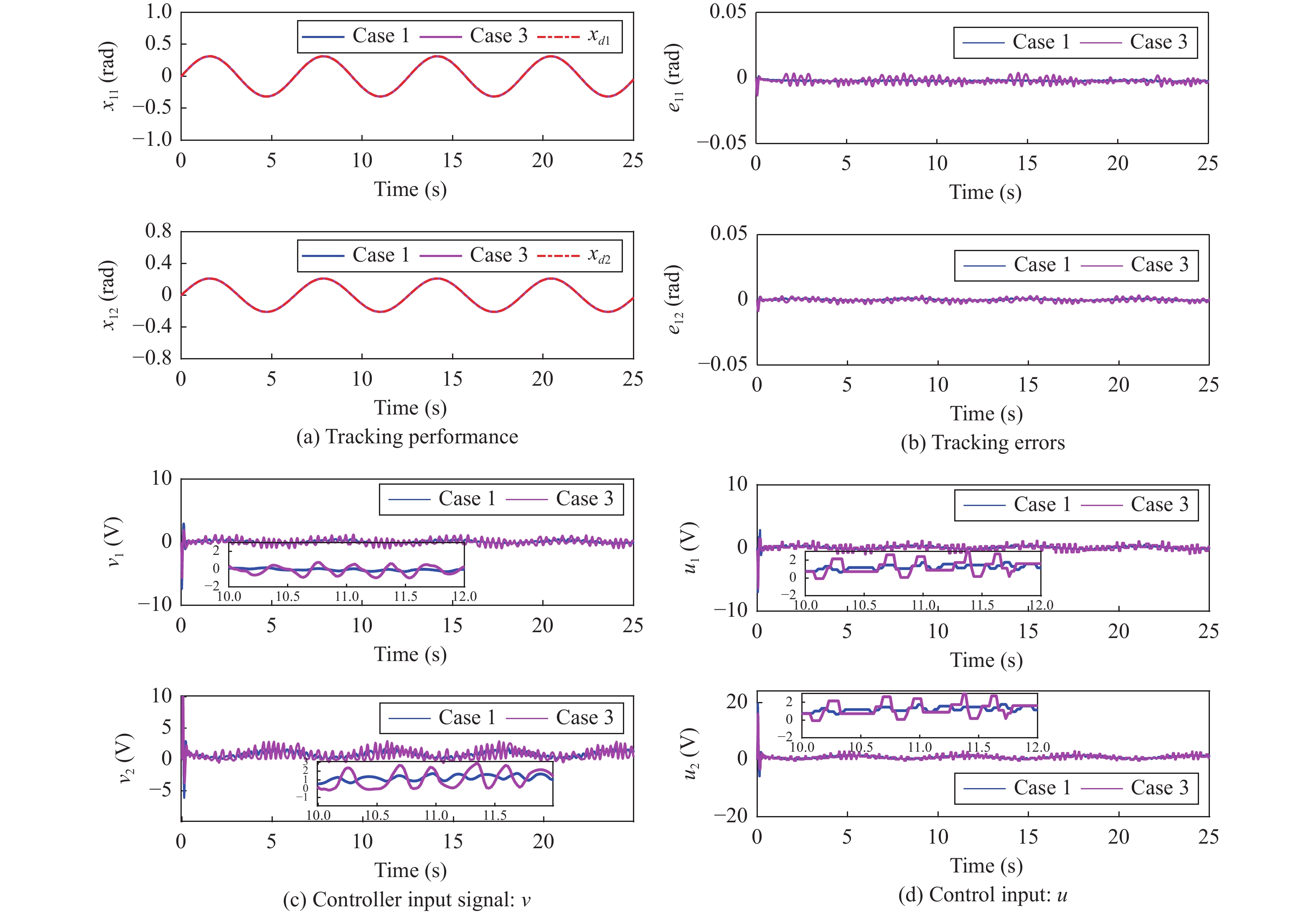
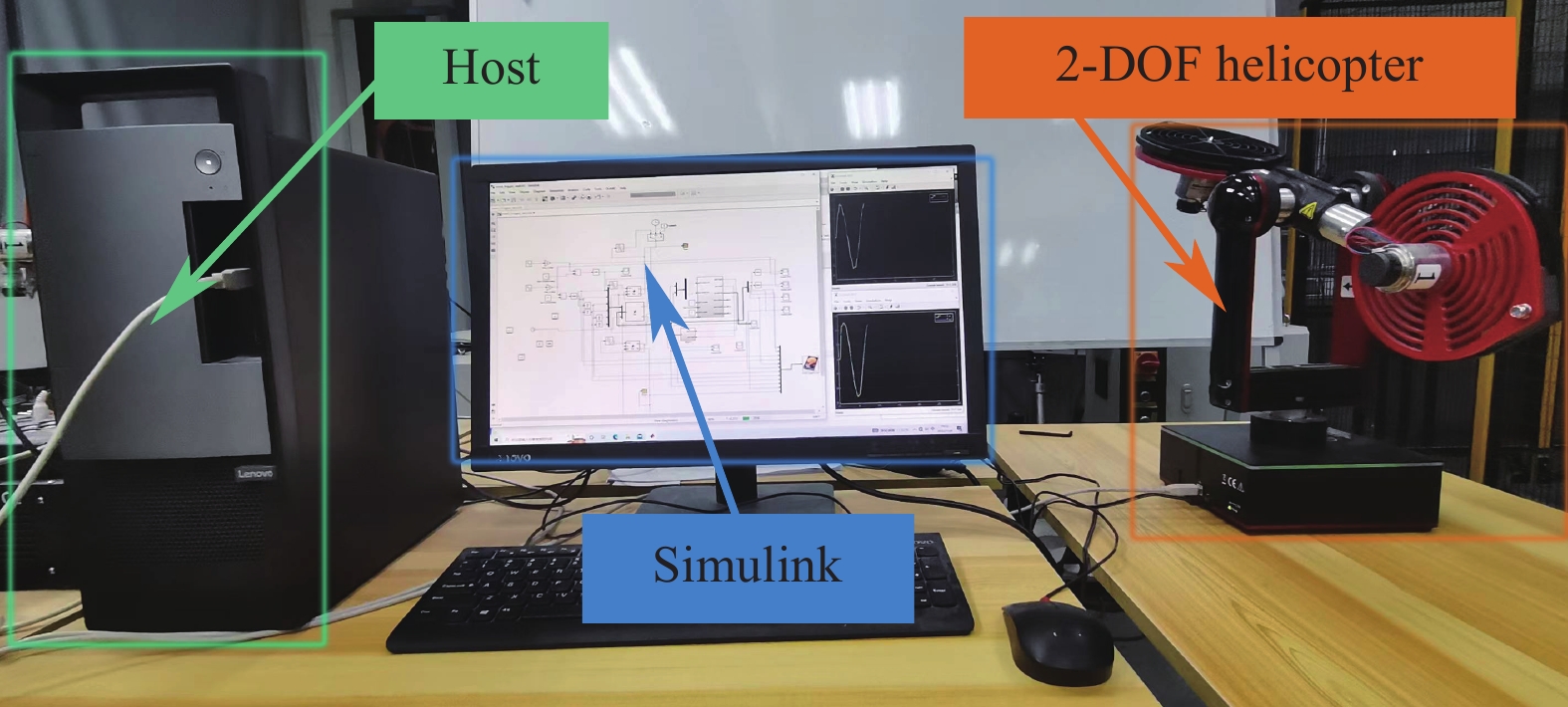
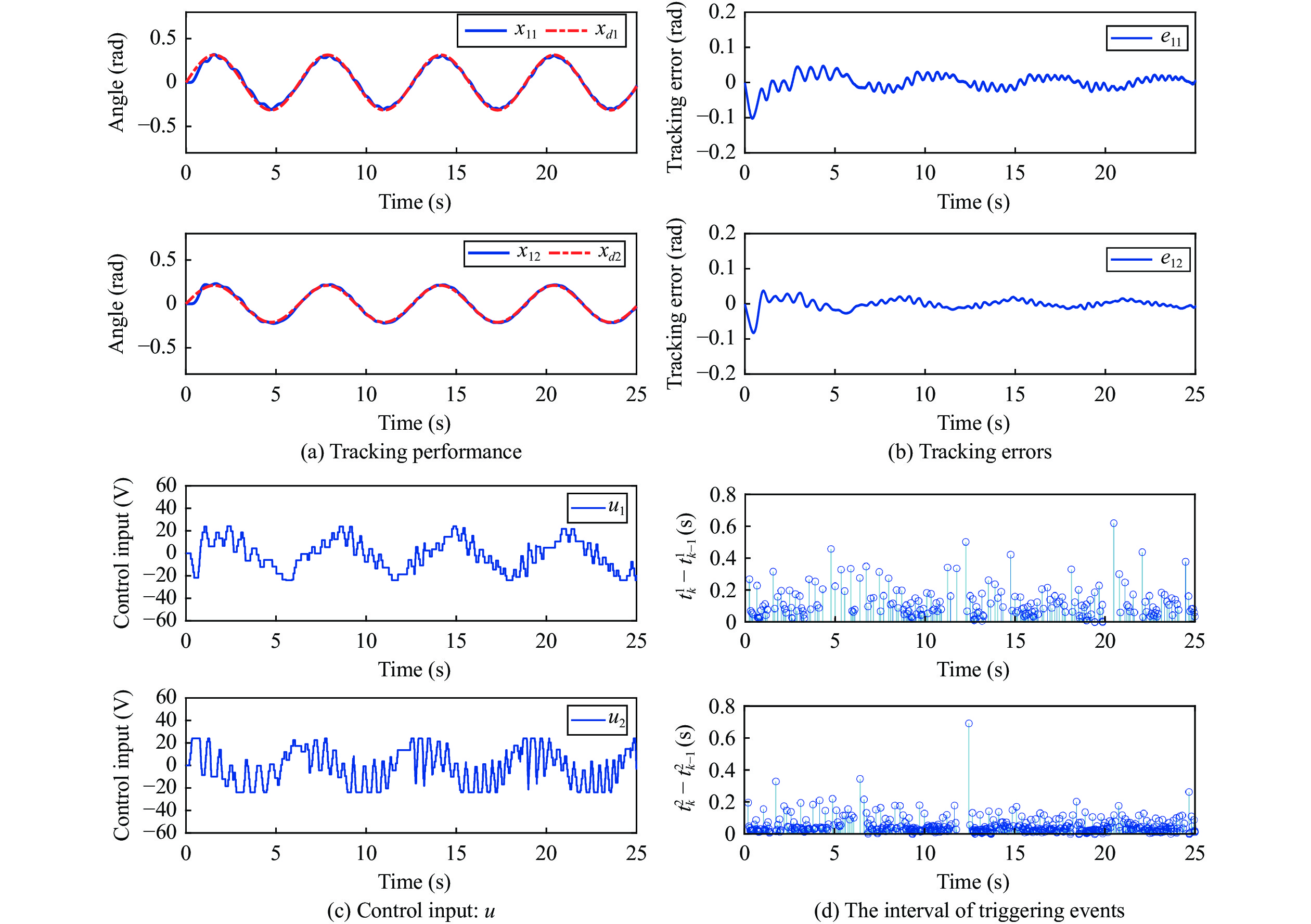
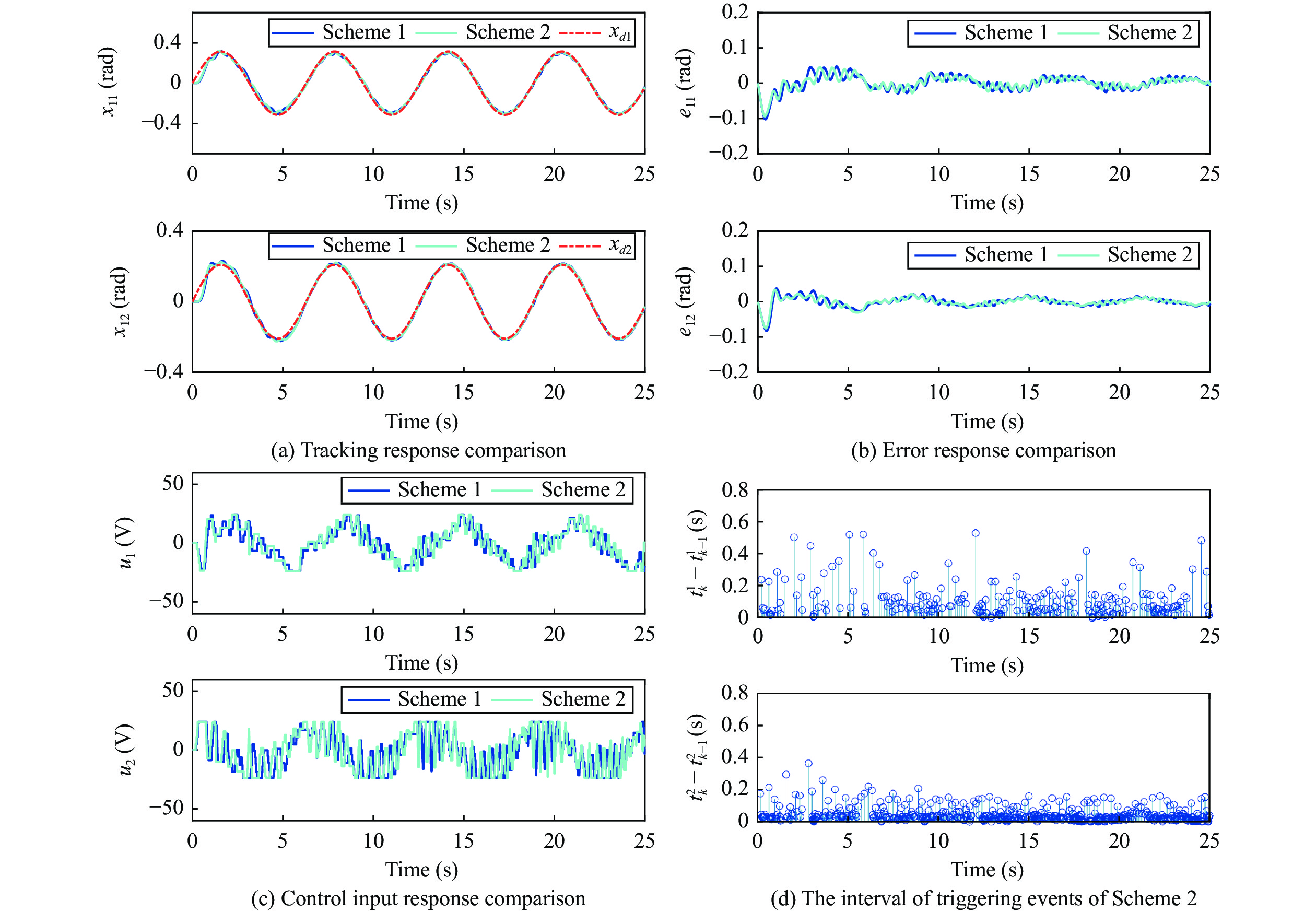
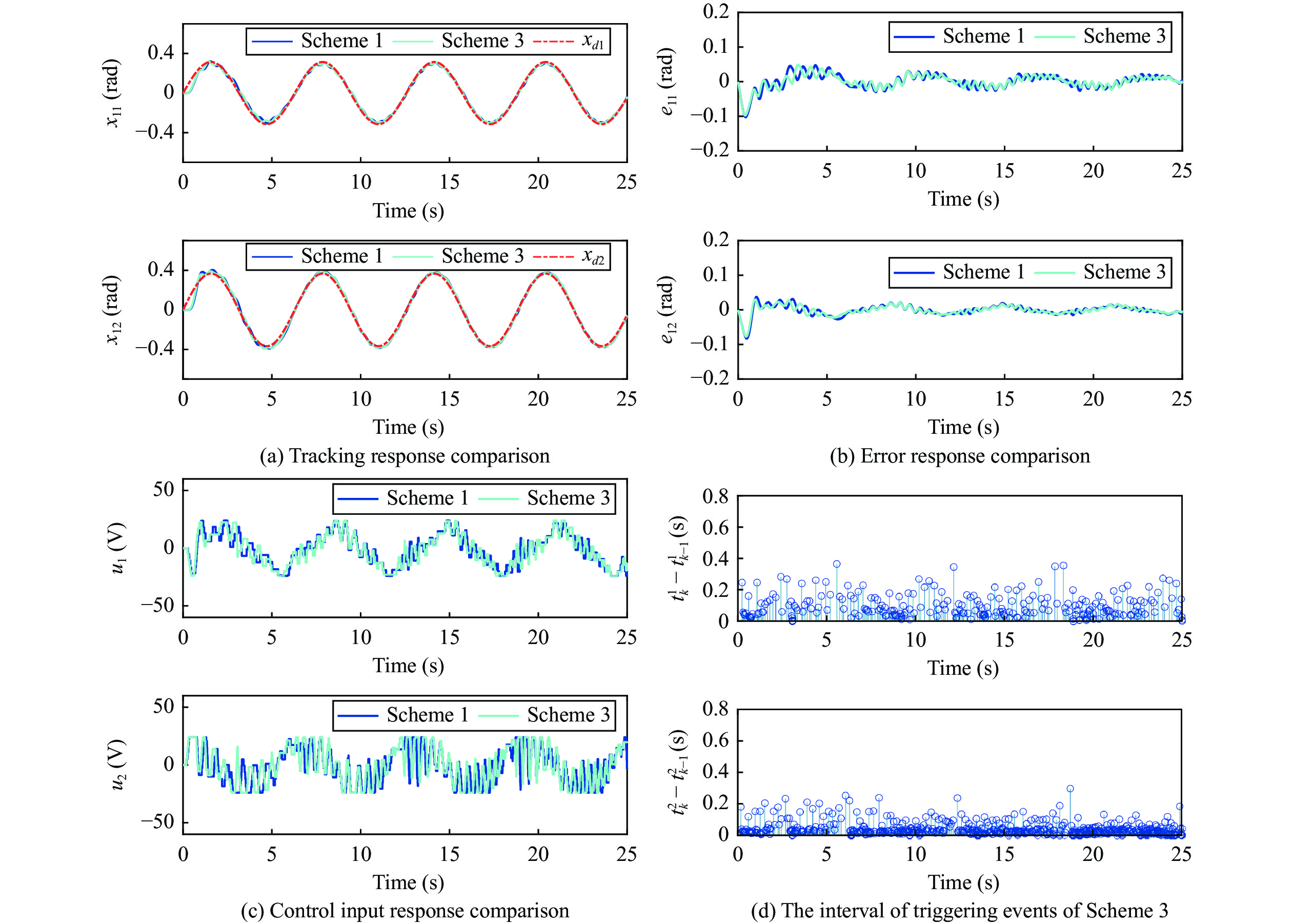
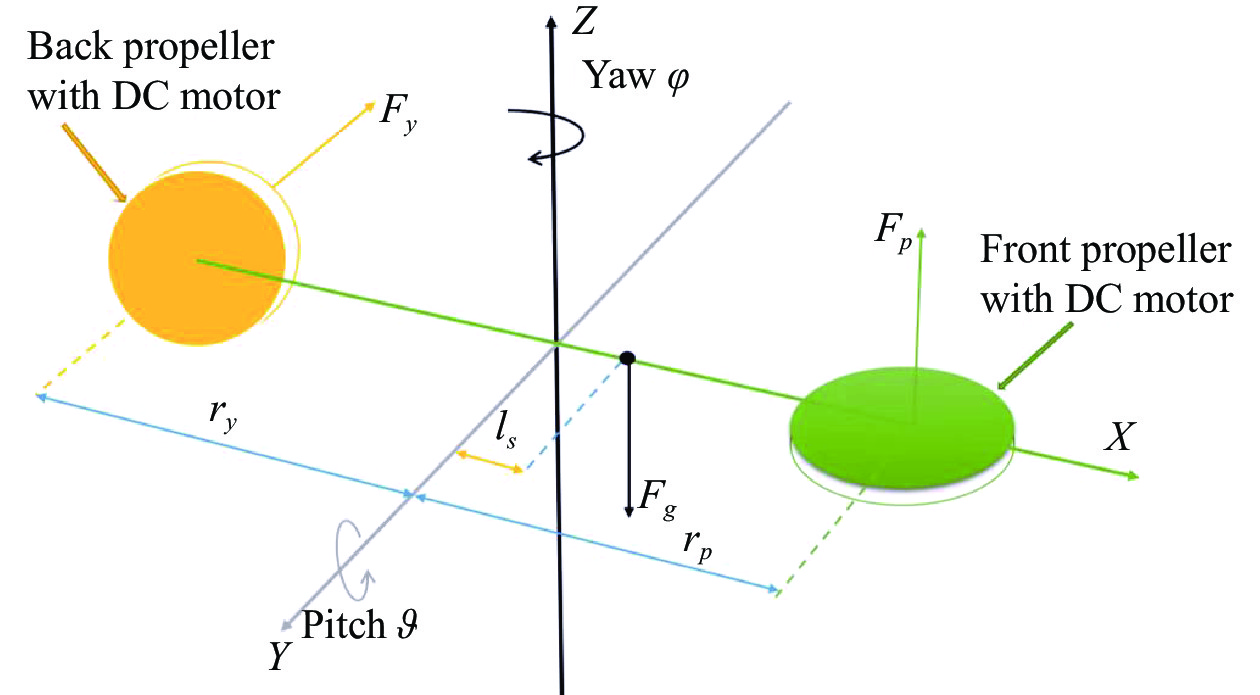
Helicopter systems present numerous benefits over fixed-wing aircraft in several fields of application. Developing control schemes for improving the tracking accuracy of such systems is crucial. This paper proposes a neural-network (NN)-based adaptive finite-time control for a two-degree-of-freedom helicopter system. In particular, a radial basis function NN is adopted to solve uncertainty in the helicopter system. Furthermore, an event-triggering mechanism (ETM) with a switching threshold is proposed to alleviate the communication burden on the system. By proposing an adaptive parameter, a bounded estimation, and a smooth function approach, the effect of network measurement errors is effectively compensated for while simultaneously avoiding the Zeno phenomenon. Additionally, the developed adaptive finite-time control technique based on an NN guarantees finite-time convergence of the tracking error, thus enhancing the control accuracy of the system. In addition, the Lyapunov direct method demonstrates that the closed-loop system is semiglobally finite-time stable. Finally, simulation and experimental results show the effectiveness of the control strategy.

| [1] |
S.-K. Kim, K. S. Kim, and C. K. Ahn, “Order reduction approach to velocity sensorless performance recovery PD-type attitude stabilizer for 2-DOF helicopter applications,” IEEE Trans. Industrial Informatics, vol. 18, no. 10, pp. 6848–6856, 2022. doi: 10.1109/TII.2022.3143204
|
| [2] |
M. Chen, P. Shi, and C.-C. Lim, “Adaptive neural fault-tolerant control of a 3-DOF model helicopter system,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 46, no. 2, pp. 260–270, 2016. doi: 10.1109/TSMC.2015.2426140
|
| [3] |
R. Singh and B. Bhushan, “Data-driven technique-based fault-tolerant control for pitch and yaw motion in unmanned helicopters,” IEEE Trans. Instrumentation and Measurement, 2020, DOI: 10.1109/TIM.2020.3025656.
|
| [4] |
S.-K. Kim and C. K. Ahn, “Performance-boosting attitude control for 2-DOF helicopter applications via surface stabilization approach,” IEEE Trans. Industrial Electronics, vol. 69, no. 7, pp. 7234–7243, 2022. doi: 10.1109/TIE.2021.3095799
|
| [5] |
B. Zheng and Y. Zhong, “Robust attitude regulation of a 3-DOF helicopter benchmark: Theory and experiments,” IEEE Trans. Industrial Electronics, vol. 58, no. 2, pp. 660–670, 2011. doi: 10.1109/TIE.2010.2046579
|
| [6] |
C. K. Verginis, C. P. Bechlioulis, A. G. Soldatos, and D. Tsipianitis, “Robust trajectory tracking control for uncertain 3-DOF helicopters with prescribed performance,” IEEE/ASME Trans. Mechatronics, 2021, DOI: 10.1109/TMECH.2021.3136046.
|
| [7] |
C. Zhu, Y. Jiang, and C. Yang, “Fixed-time neural control of robot manipulator with global stability and guaranteed transient performance,” IEEE Trans. Industrial Electronics, vol. 70, no. 1, pp. 803–812, 2023. doi: 10.1109/TIE.2022.3156037
|
| [8] |
Z. Zhao, W. He, C. Mu, T. Zou, K.-S. Hong, and H.-X. Li, “Reinforcement learning control for a 2-DOF helicopter with state constraints: Theory and experiments,” IEEE Trans. Automation Science and Engineering, DOI: 10.1109/TASE.2022.3215738.
|
| [9] |
Z. Zhao, W. He, J. Yang, and Z. Li, “Adaptive neural network control of an uncertain 2-DOF helicopter system with input backlash and output constraints,” Neural Computing and Applications, vol. 34, no. 20, pp. 18143–18154, 2022. doi: 10.1007/s00521-022-07463-3
|
| [10] |
J. Zhang, Y. Yang, Z. Zhao, and K. S. Hong, “Adaptive neural network control of a 2-DOF helicopter system with input saturation,” Int. J. Control,Autom. and Systems, vol. 21, no. 1, pp. 318–327, 2023. doi: 10.1007/s12555-021-1011-2
|
| [11] |
S. Shao and M. Chen, “Adaptive neural discrete-time fractional-order control for a uav system with prescribed performance using disturbance observer,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 51, no. 2, pp. 742–754, 2021. doi: 10.1109/TSMC.2018.2882153
|
| [12] |
Z. Liu, J. Shi, Y. He, Z. Zhao, and H.-K. Lam, “Adaptive fuzzy control for a spatial flexible hose system with dynamic event-triggered mechanism,” IEEE Trans. Aerospace and Electronic Systems, DOI: 10.1109/TAES.2022.3197551.
|
| [13] |
X. Guo, D. Zhang, J. Wang, and C. K. Ahn, “Adaptive memory event-triggered observer-based control for nonlinear multi-agent systems under DoS attacks,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 10, pp. 1644–1656, 2021. doi: 10.1109/JAS.2021.1004132
|
| [14] |
L. Liu, X. Li, Y. J. Liu, and S. Tong, “Neural network based adaptive event trigger control for a class of electromagnetic suspension systems,” Control Engineering Practice, vol. 106, 2021.
|
| [15] |
Z. Wu, J. Xiong, and M. Xie, “A switching method to event-triggered output feedback control for unmanned aerial vehicles over cognitive radio networks,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 51, no. 12, pp. 7530–7541, 2021. doi: 10.1109/TSMC.2020.2971726
|
| [16] |
L. Dou, S. Cai, X. Zhang, X. Su, and R. Zhang, “Event-triggered-based adaptive dynamic programming for distributed formation control of multi-UAV,” J. the Franklin Institute, vol. 359, no. 8, pp. 3671–3691, 2022. doi: 10.1016/j.jfranklin.2022.02.034
|
| [17] |
H. Liang, X. Guo, Y. Pan, and T. Huang, “Event-triggered fuzzy bipartite tracking control for network systems based on distributed reduced-order observers,” IEEE Trans. Fuzzy Systems, vol. 29, no. 6, pp. 1601–1614, 2021. doi: 10.1109/TFUZZ.2020.2982618
|
| [18] |
X. Zhao, S. Zhang, Z. Liu, J. Wang, and H. Gao, “Adaptive event-triggered boundary control for a flexible manipulator with input quantization,” IEEE/ASME Trans. Mechatronics, pp. 1–11, 2021.
|
| [19] |
H. Pan, D. Zhang, W. Sun, and X. Yu, “Event-triggered adaptive asymptotic tracking control of uncertain mimo nonlinear systems with actuator faults,” IEEE Trans. Cybernetics, vol. 52, no. 9, pp. 8655–8667, 2022. doi: 10.1109/TCYB.2021.3061888
|
| [20] |
Z. Zhao and Z. Liu, “Finite-time convergence disturbance rejection control for a flexible timoshenko manipulator,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 1, pp. 157–168, 2021. doi: 10.1109/JAS.2020.1003378
|
| [21] |
H. Wang, W. Bai, and X. Liu, “Finite-time adaptive fault-tolerant control for nonlinear systems with multiple faults,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 6, pp. 1417–1427, 2019. doi: 10.1109/JAS.2019.1911765
|
| [22] |
L. Kong, Q. Lai, Y. Ouyang, Q. Li, and S. Zhang, “Neural learning control of a robotic manipulator with finite-time convergence in the presence of unknown backlash-like hysteresis,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 52, no. 3, pp. 1916–1927, 2022. doi: 10.1109/TSMC.2020.3034757
|
| [23] |
Q. Chen, Y. Ye, Z. Hu, J. Na, and S. Wang, “Finite-time approximation-free attitude control of quadrotors: Theory and experiments,” IEEE Trans. Aerospace and Electronic Systems, vol. 57, no. 3, pp. 1780–1792, 2021. doi: 10.1109/TAES.2021.3050647
|
| [24] |
W. Yang, G. Cui, Z. Li, and C. Tao, “Fuzzy approximation-based adaptive finite-time tracking control for a quadrotor UAV with actuator faults,” Int. Journal of Fuzzy Systems, DOI: 10.1007/s40815-022-01361-5.
|
| [25] |
J. Sun, J. Yi, and Z. Pu, “Fixed-time adaptive fuzzy control for uncertain nonstrict-feedback systems with time-varying constraints and input saturations,” IEEE Trans. Fuzzy Systems, vol. 30, no. 4, pp. 1114–1128, 2022. doi: 10.1109/TFUZZ.2021.3052610
|
| [26] |
Y. Li, Y.-X. Li, and S. Tong, “Event-based finite-time control for nonlinear multi-agent systems with asymptotic tracking,” IEEE Trans. Automatic Control, pp. 1–8, DOI: 10.1109/TAC.2022.3197562.
|
| [27] |
C.-H. Zhang and G.-H. Yang, “Event-triggered global finite-time control for a class of uncertain nonlinear systems,” IEEE Trans. Automatic Control, vol. 65, no. 3, pp. 1340–1347, 2020. doi: 10.1109/TAC.2019.2928767
|
| [28] |
J. Sun, H. He, J. Yi, and Z. Pu, “Finite-time command-filtered composite adaptive neural control of uncertain nonlinear systems,” IEEE Trans. Cybernetics, vol. 52, no. 7, pp. 6809–6821, 2022. doi: 10.1109/TCYB.2020.3032096
|
| [29] |
Q. Inc., “Quanser aero laboratory guide,” Technical Report, Quanser, 2016.
|
| [30] |
T. Zou, H. Y. Wu, W. Sun, and Z. Zhao, “Adaptive neural network sliding mode control of a nonlinear two-degrees-of-freedom helicopter system,” Asian J. Control, DOI: 10.1002/asjc.2862.
|
| [31] |
M. Chen and G. Tao, “Adaptive fault-tolerant control of uncertain nonlinear large-scale systems with unknown dead zone,” IEEE Trans. Cybernetics, vol. 46, no. 8, pp. 1851–1862, 2016. doi: 10.1109/TCYB.2015.2456028
|
| [32] |
S. Li, L. Ding, H. Gao, Y.-J. Liu, L. Huang, and Z. Deng, “Adaptive fuzzy finite-time tracking control for nonstrict full states constrained nonlinear system with coupled dead-zone input,” IEEE Trans. Cybernetics, vol. 52, no. 2, pp. 1138–1149, 2022. doi: 10.1109/TCYB.2020.2985221
|
| [33] |
C. Wang, Y. Li, Q. Hu, and J. Huang, “Event-triggered adaptive control for attitude tracking of spacecraft,” Chinese J. Aeronautics, vol. 32, no. 2, pp. 454–462, 2019. doi: 10.1016/j.cja.2018.12.021
|
| [34] |
H. Wang, C. Bing, and L. Chong, “Adaptive neural control for strict-feedback stochastic nonlinear systems with time-delay,” Neurocomputing, vol. 77, no. 1, pp. 267–274, 2012. doi: 10.1016/j.neucom.2011.08.020
|
| [35] |
X. Wang, D. Ding, H. Dong, and X.-M. Zhang, “Neural-network-based control for discrete-time nonlinear systems with input saturation under stochastic communication protocol,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 4, pp. 766–778, 2021. doi: 10.1109/JAS.2021.1003922
|
| [36] |
Z. Zhang, C. Wen, L. Xing, and Y. Song, “Adaptive event-triggered control of uncertain nonlinear systems using intermittent output only,” IEEE Trans. Autom. Control, vol. 67, no. 8, pp. 4218–4225, 2022. doi: 10.1109/TAC.2021.3115435
|
| [37] |
X. Wang, D. Ding, X. Ge, and Q.-L. Han, “Neural-network-based control for discrete-time nonlinear systems with denial-of-service attack: The adaptive event-triggered case,” Int. J. Robust and Nonlinear Control, vol. 32, no. 5, pp. 2760–2779, 2022. doi: 10.1002/rnc.5831
|
| [38] |
X. Wang, D. Ding, X. Ge, and Q.-L. Han, “Supplementary control for quantized discrete-time nonlinear systems under goal representation heuristic dynamic programming,” IEEE Trans. Neural Networks and Learning Systems, pp. 1–13, DOI: 10.1109/TNNLS.2022.3201521.
|
Figures(7) / Tables(1)






 DownLoad:
DownLoad: