A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 9
Volume 9
Issue 9
IEEE/CAA Journal of Automatica Sinica
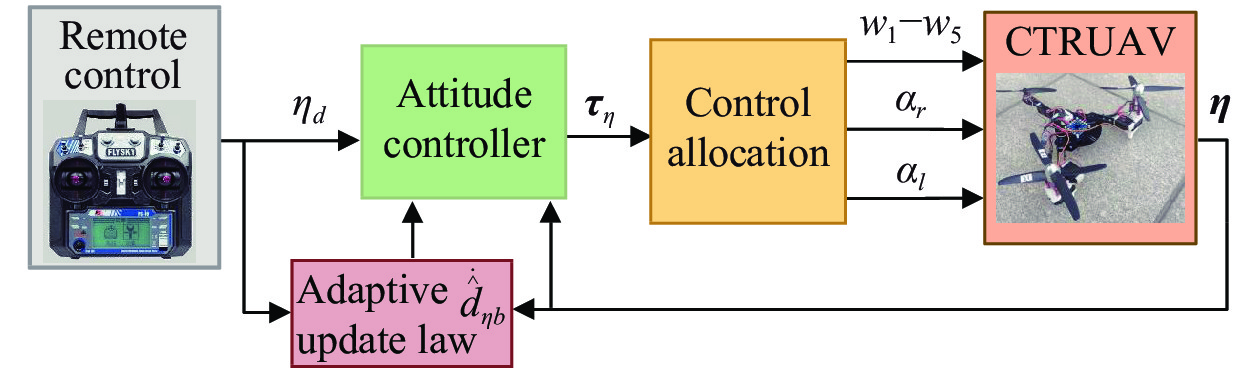
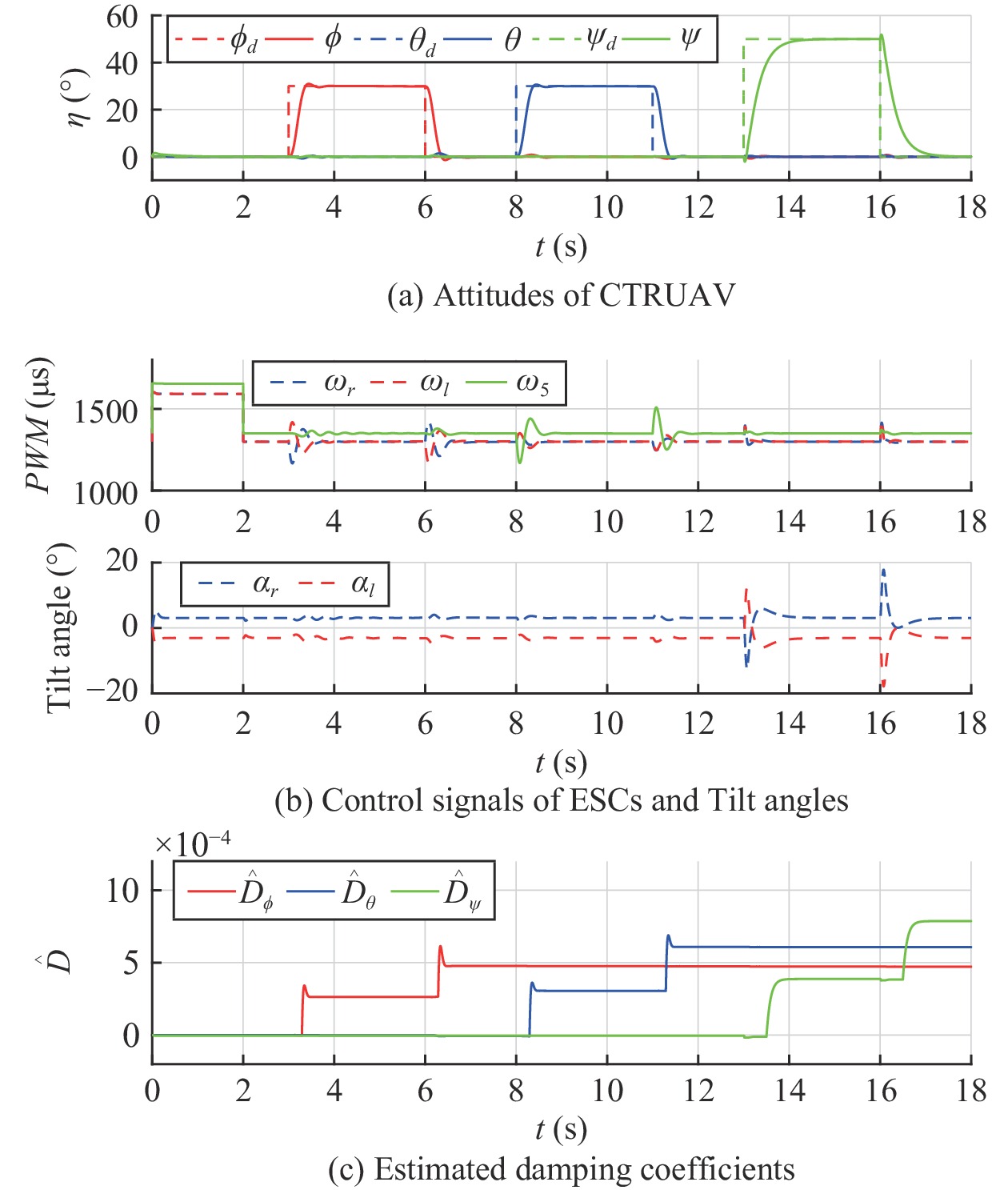
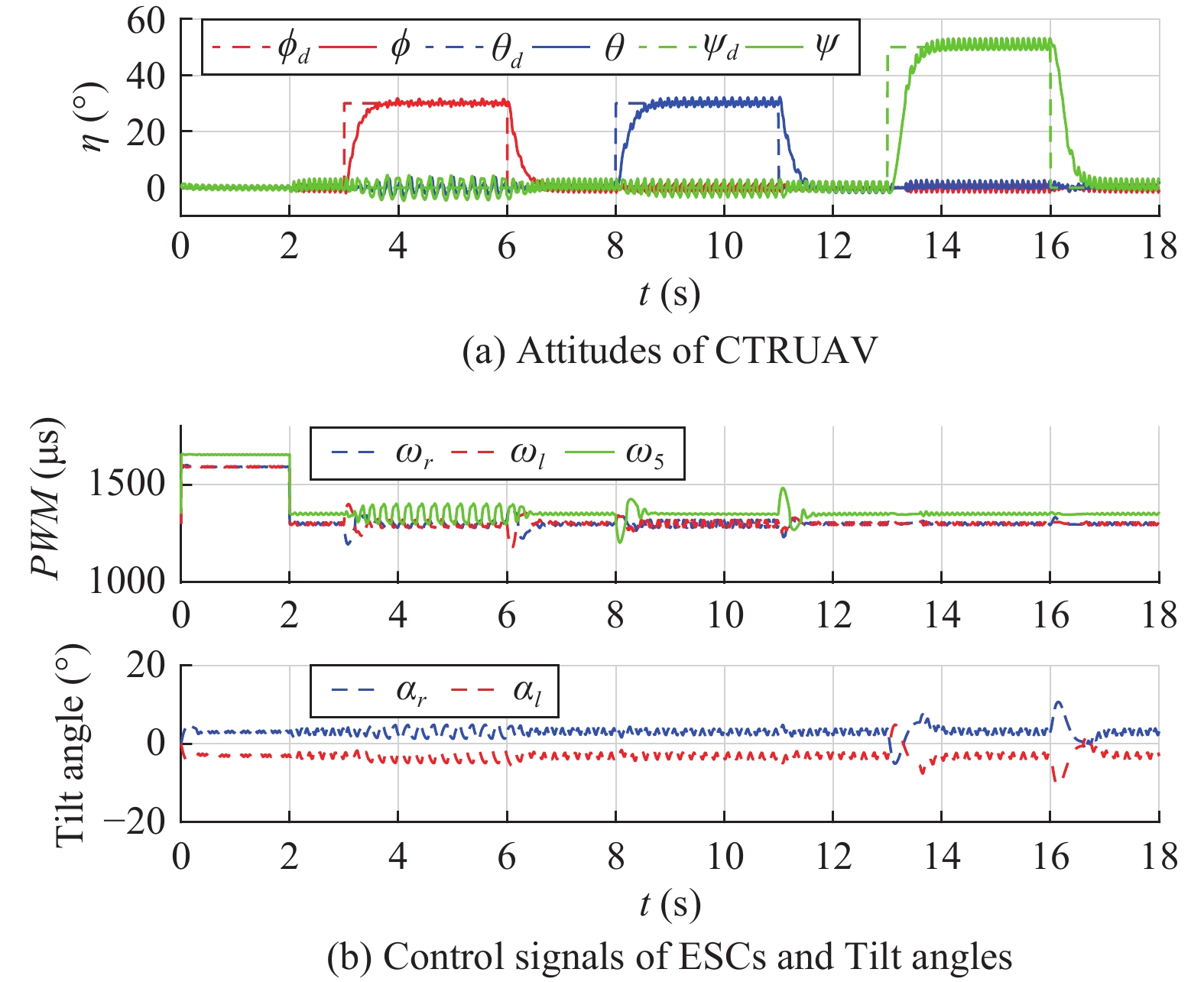
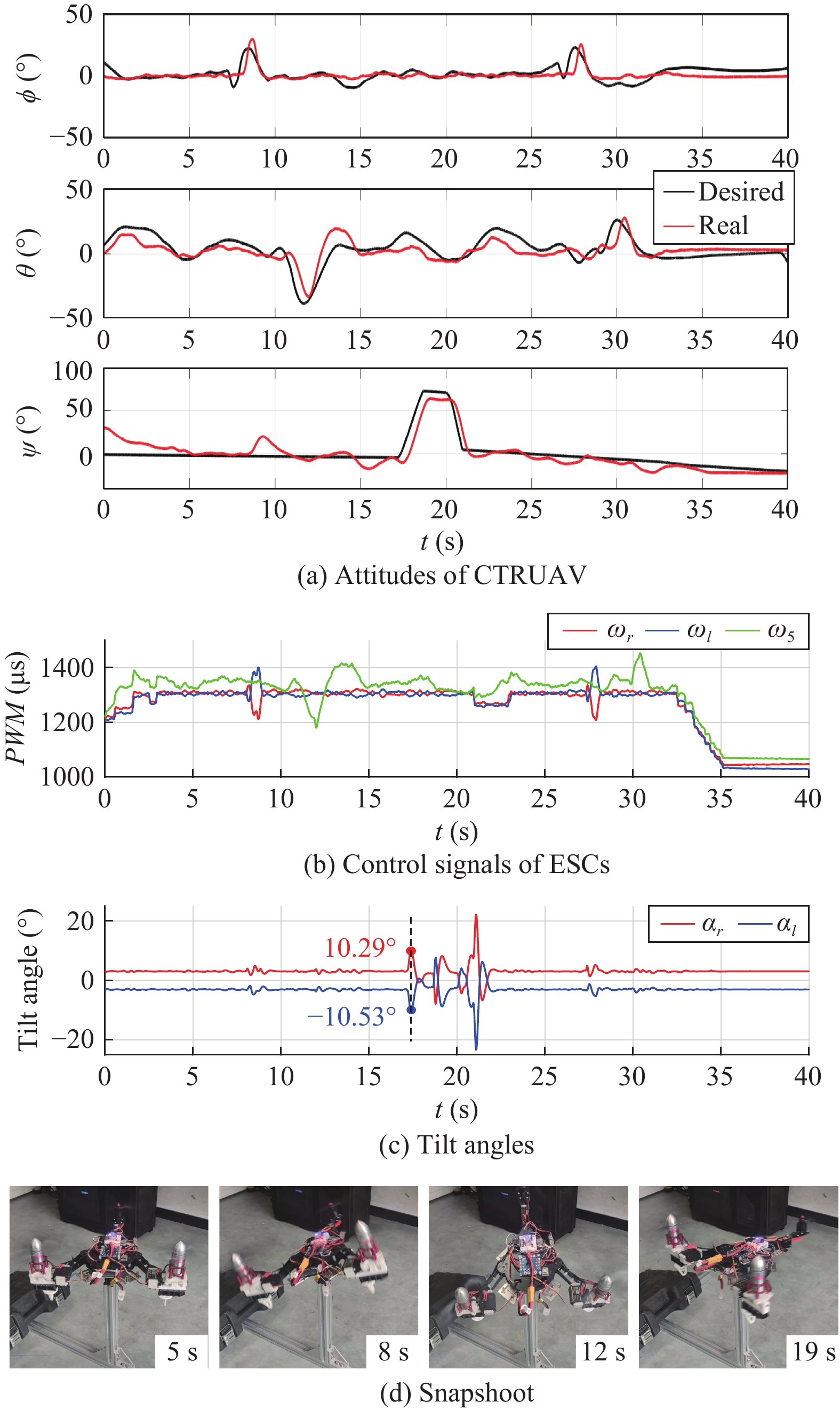
| Citation: | L. L. Chen, Z. Y. Lv, X. Y. Shen, Y. H. Wu, and X.-M. Sun, “Adaptive attitude control for a CTRUAV via immersion and invariance methodology,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 9, pp. 1710–1713, Sept. 2022. doi: 10.1109/JAS.2022.105827

|

| [1] |
Y. C. Choi and H. S. Ahn, “Nonlinear control of quadrotor for point tracking: Actual implementation and experimental tests,” IEEE/ASME Trans. Mechatronics, vol. 20, no. 3, pp. 1179–1192, 2015. doi: 10.1109/TMECH.2014.2329945
|
| [2] |
Y. Wu, K. Hu, X.-M. Sun, and Y. Ma, “Nonlinear control of quadrotor for fault tolerance: A total failure of one actuator,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 51, no. 5, pp. 2810–2820, 2021.
|
| [3] |
Z. Zuo, C. Liu, Q.-L. Han, and J. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–614, 2022. doi: 10.1109/JAS.2022.105410
|
| [4] |
Z. Liu, Y. Q. He, L. Y. Yang, and J. D. Han, “Control techniques of tilt rotor unmanned aerial vehicle systems: Control techniques of tilt rotor unmanned aerial vehicle systems: A review,” Chinese J. Aeronautics, vol. 30, no. 136, pp. 141–154, 2017.
|
| [5] |
A. Franchi, R. Carli, D. Bicego, and M. Ryll, “Full-pose tracking control for aerial robotic systems with laterally bounded input force,” IEEE Trans. Robotics, pp. 1–8, 2017.
|
| [6] |
B. Xian and W. Hao, “Nonlinear robust fault-tolerant control of the Tilt trirotor UAV under rear servo’s stuck fault: Theory and experiments,” IEEE Trans. Industrial Informatics, vol. 15, no. 4, pp. 2158–2166, 2019. doi: 10.1109/TII.2018.2858143
|
| [7] |
L. Yu, G. He, S. Zhao, X. Wang, and L. Shen, “Immersion and invariance-based sliding mode attitude control of Tilt TRI-Rotor UAV in helicopter mode,” Int. J. Control,Automation and Systems, vol. 19, no. 2, pp. 722–735, 2021. doi: 10.1007/s12555-020-0110-9
|
| [8] |
Z. Lv, Y. Wu, Q. Zhao, and X. M. Sun, “Design and control of a novel coaxial tilt-rotor UAV,” IEEE Trans. Industrial Electronics, 2021.
|
| [9] |
T. Parham, “V-22 pilot-in-the-loop aeroelastic stability analysis, ” in Proc. 47th AHS Annual Forum., Phoenix, USA, 1991, pp. 1307–1319.
|
| [10] |
Z. T. Dydek, A. M. Annaswamy, and E. Lavretsky, “Adaptive control of quadrotor UAVs: A design trade study with flight evaluations,” IEEE Trans. Control Systems Technology, vol. 21, no. 4, pp. 1400–1406, 2013. doi: 10.1109/TCST.2012.2200104
|
| [11] |
Q. Guo, Z. Zuo, and Z. Ding, “Parametric adaptive control of single-ROD electrohydraulic system with block-strict-feedback model,” Automatica, vol. 113, p. 108807, 2020.
|
| [12] |
Z. Zuo and S. Mallikarjunan, “
|
| [13] |
J. Slotine and W. P. Li, Applied Nonlinear Control, Beijing: China Machine Press, 1991.
|
| [14] |
A. Astolfi and R. Ortega, “Immersion and invariance: A new tool for stabilization and adaptive control of nonlinear systems,” IEEE Trans. Automatic Control, vol. 48, no. 4, pp. 590–606, 2003. doi: 10.1109/TAC.2003.809820
|
| [15] |
A. Astolfi, D. Karagiannis, and R. Ortega, Nonlinear and Adaptive Control with Applications, London, UK: Springer, 2008, vol. 187.
|
| [16] |
J. Hu and H. Zhang, “Immersion and invariance based command-filtered adaptive backstepping control of VTOL vehicles,” Automatica, vol. 49, no. 7, pp. 2160–2167, 2013. doi: 10.1016/j.automatica.2013.03.019
|
| [17] |
D. N. Cardoso, S. Esteban, and G. V. Raffo, “A nonlinear w 1 controller of a tilt-rotor UAV for trajectory tracking, ” in Proc. 18th IEEE European Control Conf., 2019, pp. 928–934.
|
| [18] |
V. Bobál, “Technical note self-tuning ziegler-nichols PID controller,” Int. J. Adaptive Control and Signal Processing, vol. 9, no. 2, pp. 213–226, 1995. doi: 10.1002/acs.4480090208
|
Figures(5) / Tables(2)







 DownLoad:
DownLoad: