A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 8
Volume 9
Issue 8
IEEE/CAA Journal of Automatica Sinica
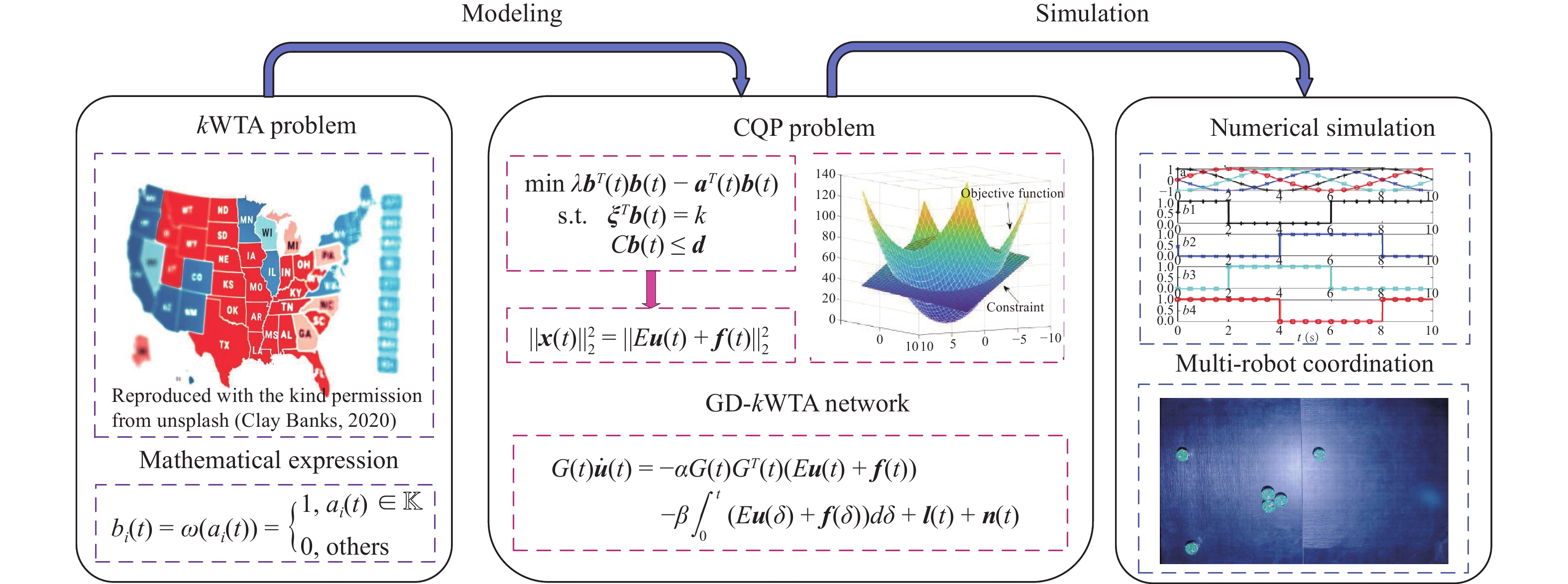
| Citation: | M. Liu, X. Y. Zhang, M. S. Shang, and L. Jin, “Gradient-based differential kWTA network with application to competitive coordination of multiple robots,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 8, pp. 1452–1463, Aug. 2022. doi: 10.1109/JAS.2022.105731

|

| [1] |
S. Li, M. Zhou, X. Luo, and Z. You, “Distributed winner-take-all in dynamic networks,” IEEE Trans. Automat. Contr., vol. 62, no. 2, pp. 577–589, Feb. 2017. doi: 10.1109/TAC.2016.2578645
|
| [2] |
Y. Zhang, S. Xiang, X. Guo, A. Wen, and Y. Hao, “The winner-take-all mechanism for all-optical systems of pattern recognition and max-pooling operation,” J. Lightwave Technol., vol. 38, no. 18, pp. 5071–5077, Sept. 2020. doi: 10.1109/JLT.2020.3000670
|
| [3] |
R. Lippmann, “An introduction to computing with neural nets,” IEEE ASSP Mag., vol. 4, no. 2, pp. 4–22, Apr. 1987. doi: 10.1109/MASSP.1987.1165576
|
| [4] |
J. Lazzaro, S. Ryckebusch, M. A. Mahowald, and C. A. Mead, “Winner-take-all networks of O(N) complexity,” in Advances in Neural Inform. Processing Syst., D. S. Touretzky, Ed. Los Altos, CA: Morgan Kaufmann, 1989, pp. 703–711.
|
| [5] |
E. Hernández-García, C. López, S. Pigolotti, and K. Andersen, “Species competition: Coexistence, exclusion and clustering,” Philosoph. Trans. R. Soc. A: Math.,Phys. Eng. Sci., vol. 367, no. 1901, pp. 3183–3195, Sept. 2009.
|
| [6] |
P. Tien, “A new discrete-time multi-constrained K-winner-take-all recurrent network and its application to prioritized scheduling,” IEEE Trans. Neural Netw. Learn. Syst., vol. 28, no. 11, pp. 2674–2685, Nov. 2017. doi: 10.1109/TNNLS.2016.2600410
|
| [7] |
Y. Zhang, S. Li, B. Xu, and Y. Yang, “Analysis and design of a distributed k-winners-take-all model,” Automatica, vol. 115, p. 108868, May 2020.
|
| [8] |
K. Simone, A. Deutscher, J. M. Crook, F. W. Ohl, E. Budinger, C. K. Moeller, and H. Schulze, “Auditory cortical contrast enhancing by global winner-take-all inhibitory interactions,” PLoS ONE, vol. 3, no. 3, p. 12, Feb. 2008.
|
| [9] |
Z. Guo and J. Wang, “Information retrieval from large data sets via multiple-winners-take-all,” in Proc. IEEE Int. Symp. Circuits Syst., Rio de Janeiro, Brazil, 2011, pp. 2669–2672.
|
| [10] |
M. Liu, S. Li, and L. Jin, “Modeling and analysis of Matthew effect under switching social networks via distributed competition,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 7, pp. 1311–1314, 2022. doi: 10.1109/JAS.2022.105527
|
| [11] |
X. Zhao, Q. Zong, B. Tian, and M. You, “Finite-time dynamic allocation and control in multiagent coordination for target tracking,” IEEE Trans. Cybern.
|
| [12] |
L. Su, C. J. Chang, and N. Lynch, “Spike-based winner-take-all computation: Fundamental limits and order-optimal circuits,” Neural Comput., vol. 31, no. 12, pp. 2523–2561, Dec. 2019. doi: 10.1162/neco_a_01242
|
| [13] |
W. Lu, C.-S. Leung, J. Sum, and Y. Xiao, “DNN-kWTA with bounded random offset voltage drifts in threshold logic units,” IEEE Trans. Neural Netw. Learn. Syst..
|
| [14] |
L. Jin, X. Zheng, and X. Luo, “Neural dynamics for distributed collaborative control of manipulators with time delays,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 854–863, May 2022.
|
| [15] |
W. J. Wolfe, D. Mathis, C. Anderson, J. Rothman, M. Gottler, G. Brady, R. Walker, G. Duane, and G. Alaghband, “K-winner networks,” IEEE Trans. Neural Netw., vol. 2, no. 2, pp. 310–315, Mar. 1991. doi: 10.1109/72.80342
|
| [16] |
W. Maass, “On the computational power of winner-take-all,” Neural Comput., vol. 12, no. 11, pp. 2519–2535, Nov. 2000. doi: 10.1162/089976600300014827
|
| [17] |
P. V. Tymoshchuk and D. C. Wunsch, “Design of a K-winners-take-all model with a binary spike train,” IEEE Trans. Cybern., vol. 49, no. 8, pp. 3131–3140, Aug. 2019. doi: 10.1109/TCYB.2018.2839691
|
| [18] |
Z. Xu, H. Jin, K. Leung, Y. Leung, and C. Wong, “An automata network for performing combinatorial optimization,” Neurocomput., vol. 47, no. 14, pp. 59–83, Aug. 2002.
|
| [19] |
L. V. Ferreira, E. Kaszkurewicz, and A. Bhaya, “Synthesis of a k-winners-take-all neural network using linear programming with bounded variables,” in Proc. Int. Joint Conf. Neural Netw, Portland, USA, 2003, vol. 3, pp. 2360–2365.
|
| [20] |
S. Li, Y. Li, and Z. Wang, “A class of finite-time dual neural networks for solving quadratic programming problems and its k-winners-take-all application,” Neural Netw., vol. 39, pp. 27–39, 2013. doi: 10.1016/j.neunet.2012.12.009
|
| [21] |
Q. Liu, C. Dang, and J. Cao, “A novel recurrent neural network with one neuron and finite-time convergence for k-winners-take-all operation,” IEEE Trans. Neural Netw., vol. 21, no. 7, pp. 1140–1148, Jul. 2010. doi: 10.1109/TNN.2010.2050781
|
| [22] |
L. Jin, J. Yan, X. Du, X. Xiao, and D. Fu, “RNN for solving time-variant generalized Sylvester equation with applications to robots and acoustic source localization,” IEEE Trans. Ind. Inform., vol. 16, no. 10, pp. 6359–6369, Oct. 2020. doi: 10.1109/TII.2020.2964817
|
| [23] |
X. Luo, W. Qin, A. Dong, K. Sedraoui, and M. Zhou, “Efficient and high-quality recommendations via momentum-incorporated parallel stochastic gradient descent-based learning,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 402–411, Feb. 2021. doi: 10.1109/JAS.2020.1003396
|
| [24] |
L. Jin, L. Wei, and S. Li, “Gradient-based differential neural-solution to time-dependent nonlinear optimization,” IEEE Trans. Automat. Contr.
|
| [25] |
Z. Li, L. Gao, W. Chen, and Y. Xu, “Distributed adaptive cooperative tracking of uncertain nonlinear fractional-order multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 292–300, Jan. 2020. doi: 10.1109/JAS.2019.1911858
|
| [26] |
Y. Yang, L. Liao, H. Yang, and S. Li, “An optimal control strategy for multi-UAVs target tracking and cooperative competition,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 12, pp. 1931–1947, Dec. 2021. doi: 10.1109/JAS.2020.1003012
|
| [27] |
Y. Ju, D. Ding, X. He, Q.-L. Han, and G. Wei, “Consensus control of multi-agent systems using fault-estimation-in-the-loop: Dynamic event-triggered case,” IEEE/CAA J. Autom. Sinica. DOI: 110.1109/JAS.2021.1004386.
|
| [28] |
L. Ma, Y.-L. Wang, and Q.-L. Han, “Cooperative target tracking of multiple autonomous surface vehicles under switching interaction topologies,” IEEE/CAA J. Autom. Sinica. DOI: 10.1109/JAS.2022.105509.
|
| [29] |
Z. Zhou, J. Liu, and J. Yu, “A survey of underwater multi-robot systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 1–18, Jan. 2022. doi: 10.1109/JAS.2021.1004269
|
| [30] |
X. Ge, Q.-L. Han, J. Wang, and X.-M. Zhang, “A scalable adaptive approach to multi-vehicle formation control with obstacle avoidance,” IEEE/CAA J. Autom. Sinica., vol. 9, no. 6, pp. 990–1004, 2022. doi: 10.1109/JAS.2021.1004263
|
| [31] |
Y. Qi, L. Jin, X. Luo, Y. Shi, and M. Liu, “Robust k-WTA network generation, analysis, and applications to multiagent coordination,” IEEE Trans. Cybern. DOI: 10.1109/TCYB.2021.3079457.
|
| [32] |
I. Ahmad, X. Ge, and Q.-L. Han, “Decentralized dynamic event-triggered communication and active suspension control of in-wheel motor driven electric vehicles with dynamic damping,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 971–986, May 2021. doi: 10.1109/JAS.2021.1003967
|
| [33] |
H. Zhang, J. Sun, and Z. Wang, “Distributed control of nonholonomic robots without global position measurements subject to unknown slippage constraints,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 2, pp. 354–364, Feb. 2022. doi: 10.1109/JAS.2021.1004329
|
| [34] |
L. Jin, S. Li, H. M. La, X. Zhang, and B. Hu, “Dynamic task allocation in multi-robot coordination for moving target tracking: A distributed approach,” Automatica, vol. 100, pp. 75–81, Feb. 2019. doi: 10.1016/j.automatica.2018.11.001
|
| [35] |
S. Li, Y. Wang, J. Yu, and B. Liu, “A nonlinear model to generate the winner-take-all competition,” Commun. Nonlinear Sci. Numer. Simul., vol. 18, no. 3, pp. 435–442, Mar. 2013. doi: 10.1016/j.cnsns.2012.07.021
|
| [36] |
Y. Zhang, K. Chen, and H. Tan, “Performance analysis of gradient neural network exploited for online time-varying matrix inversion,” IEEE Trans. Automat. Contr., vol. 54, no. 8, pp. 1940–1945, Aug. 2009. doi: 10.1109/TAC.2009.2023779
|
| [37] |
A. Nazemi, “A neural network model for solving convex quadratic programming problems with some applications,” Eng. Appl. Artif. Intel., vol. 32, pp. 54–62, 2014. doi: 10.1016/j.engappai.2014.02.014
|
| [38] |
A. Nazemi, “A capable neural network framework for solving degenerate quadratic optimization problems with an application in image fusion,” Neural Process. Lett., vol. 47, no. 1, pp. 167–192, 2018. doi: 10.1007/s11063-017-9640-4
|
| [39] |
W. Li, X. Ma, J. Luo, and L. Jin, “A strictly predefined-time convergent neural solution to equality-constrained and inequality-constrained time-variant quadratic programming,” IEEE Trans. Syst. Man Cybern., vol. 51, no. 7, pp. 4028–4039, Jul. 2021. doi: 10.1109/TSMC.2019.2930763
|
| [40] |
X. Zhang, L. Chen, S. Li, Stanimirovic, J. Zhang, and L. Jin, “Design and analysis of recurrent neural network models with non-linear activation functions for solving time-varying quadratic programming problems,” CAAI Trans. Intell. Technol., vol. 6, no. 4, pp. 394–404, Dec. 2021. doi: 10.1049/cit2.12019
|
| [41] |
X. Wang, D. Ding, X. Ge, and Q.-L. Han, “Neural-network-based control for discrete-time nonlinear systems with denial-of-service attack: The adaptive event-triggered case,” Int. J. Robust Nonlinear Control, vol. 32, no. 5, pp. 2760–2779, 2022. doi: 10.1002/rnc.5831
|
| [42] |
H. Song, D. Ding, H. Dong, and X. Yi, “Distributed filtering based on Cauchy-kernel-based maximum correntropy subject to randomly occurring cyber-attacks,” Automatica.
|
Figures(9) / Tables(1)






 DownLoad:
DownLoad: