A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 5
Volume 9
Issue 5
IEEE/CAA Journal of Automatica Sinica
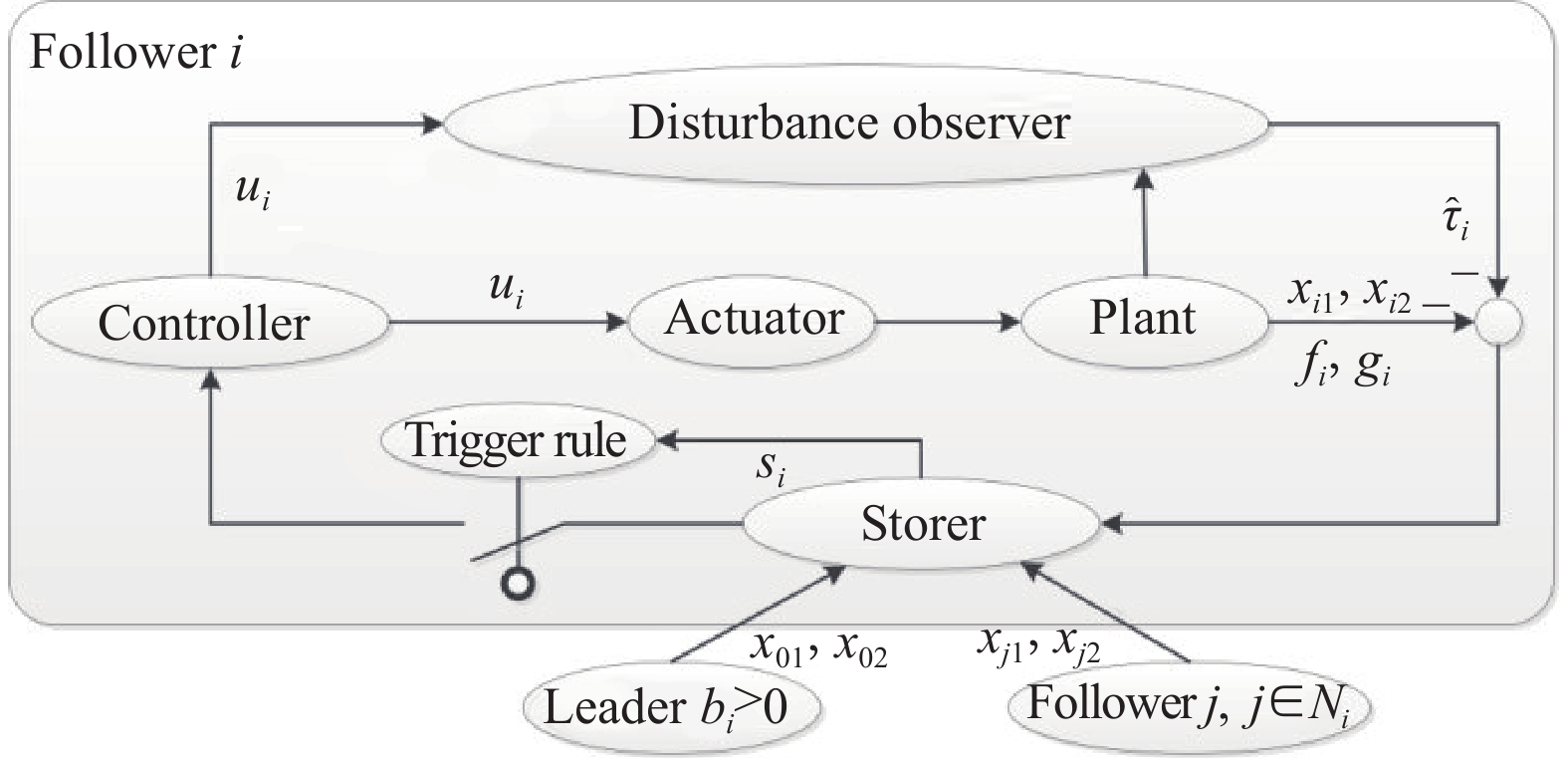
| Citation: | X. C. Guo, G. L. Wei, M. Yao, and P. J. Zhang, “Consensus control for multiple Euler-Lagrange systems based on high-order disturbance observer: An event-triggered approach,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 945–948, May 2022. doi: 10.1109/JAS.2022.105584

|

| [1] |
X. Ge, S. Xiao, Q.-L. Han, X.-M. Zhang, and D. Ding, “Dynamic event-triggered scheduling and platooning control co-design for automated vehicles over vehicular ad-hoc networks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 31–46, Jan. 2022. doi: 10.1109/JAS.2021.1004060
|
| [2] |
Y. Ju, X. Tian, H. Liu, and L. Ma, “Fault detection of networked dynamical systems: A survey of trends and techniques,” Int. Journal of Systems Science, vol. 52, no. 16, pp. 3390–3409, Dec. 2021. doi: 10.1080/00207721.2021.1998722
|
| [3] |
J. Hu, Z. Wang, G.-P. Liu, C. Jia, and J. Williams, “Event-triggered recursive state estimation for dynamical networks under randomly switching topologies and multiple missing measurements,” Automatica, vol. 115, art. No. 108908, May. 2020.
|
| [4] |
H. Cai and J. Huang, “The leader-following consensus for multiple uncertain Euler-Lagrange systems with an adaptive distributed observer,” IEEE Trans. Automatic Control, vol. 61, no. 10, pp. 3152–3157, 2016. doi: 10.1109/TAC.2015.2504728
|
| [5] |
M. Lu and L. Liu, “Leader-following consensus of multiple uncertain Euler-Lagrange systems with unknown dynamic leader,” IEEE Trans. Automatic Control, vol. 64, no. 10, pp. 4167–4173, Oct. 2019. doi: 10.1109/TAC.2019.2892384
|
| [6] |
N. Huang, Z. Duan, and Y. Zhao, “Distributed consensus for multiple Euler-Lagrange systems: An event-triggered approach,” Science China Technological Sciences, vol. 59, no. 1, pp. 33–44, Jan. 2016. doi: 10.1007/s11431-015-5987-9
|
| [7] |
T. Xu, Y. Hao, and Z. Duan, “Fully distributed containment control for multiple Euler-Lagrange systems over directed graphs: An event-triggered approach,” IEEE Trans. Circuits and Systems-I:Regular Papers, vol. 67, no. 6, pp. 2078–2090, Jun. 2020. doi: 10.1109/TCSI.2020.2971037
|
| [8] |
Z. Wang, D. Wang, and W. Wang, “Adaptive fuzzy containment control for multiple uncertain Euler-Lagrange systems with an event-based observer,” IEEE Trans. Fuzzy Systems, vol. 28, no. 8, pp. 1610–1619, Aug. 2020. doi: 10.1109/TFUZZ.2019.2919484
|
| [9] |
B. Shen, Z. Wang, D. Wang, and H. Liu, “Distributed state-saturated recursive filtering over sensor networks under round-robin protocol,” IEEE Trans. Cybernetics, vol. 50, no. 8, pp. 3605–3615, Aug. 2020. doi: 10.1109/TCYB.2019.2932460
|
| [10] |
L. Zou, Z. Wang, Q.-L. Han, and D. H. Zhou, “Moving horizon estimation of networked nonlinear systems with random access protocol,” IEEE Trans. Systems,Man,and Cybernetics:Systems, vol. 51, no. 5, pp. 2937–2948, May 2021. doi: 10.1109/TSMC.2019.2918002
|
| [11] |
X. Ge, Q.-L. Han, L. Ding, Y.-L. Wang, and X.-M. Zhang, “Dynamic event-triggered distributed coordination control and its applications: A survey of trends and techniques,” IEEE Trans. Systems Man Cybernetics-Systems, vol. 50, no. 9, pp. 3112–3125, Sep. 2020. doi: 10.1109/TSMC.2020.3010825
|
| [12] |
D. Ding, Z. Wang, and Q.-L. Han, “Neural-network-based consensus control for multiagent systems with input constraints: The event-triggered case,” IEEE Trans. Cybernetics, vol. 50, no. 8, pp. 3719–3730, Aug. 2020. doi: 10.1109/TCYB.2019.2927471
|
| [13] |
H. Shan, H. Xue, S. Hu, and H. Liang, “Finite-time dynamic surface control for multi-agent systems with prescribed performance and unknown control directions,” Int. Journal of Systems Science, vol. 53, no. 2, pp. 325–336, Jan. 2022. doi: 10.1080/00207721.2021.1954719
|
| [14] |
W. Chen, “Disturbance observer based control for nonlinear systems,” Trans. Mechatronics, vol. 9, no. 4, pp. 706–710, 2004. doi: 10.1109/TMECH.2004.839034
|
| [15] |
D. Ginoya, P. D. Shendge, and S. B. Phadke, “Sliding mode control for mismatched uncertain systems using an extended disturbance observer,” IEEE Trans. Industrial Electronics, vol. 61, no. 4, pp. 1983–1992, Apr. 2014. doi: 10.1109/TIE.2013.2271597
|
| [16] |
J. Huang, S. Ri, T. Fukuda, and Y. Wang, “A disturbance observer based sliding mode control for a class of underactuated robotic system with mismatched uncertainties,” IEEE Trans. Automatic Control, vol. 64, no. 6, pp. 2480–2487, Jun. 2019. doi: 10.1109/TAC.2018.2868026
|
| [17] |
J.-J. E. Slotine and W. Li, “Control of multi-input physical systems,” in Applied Nonlinear Control, Englewood Cliffs, NJ: Prentice Hall, pp. 393–403, 1991.
|
| [18] |
H. Zhang and F. L. Lewis, “Adaptive cooperative tracking control of higher-order nonlinear systems with unknown dynamics,” Automatica, vol. 48, no. 7, pp. 1432–1439, 2012. doi: 10.1016/j.automatica.2012.05.008
|
| [19] |
P. Ioannou and B. Fidan, “Properties of functions and matrices,” in Adaptive Control Tutorial, Philadelphia, USA: SIAM, pp. 326–329, 2006.
|
Figures(5)






 DownLoad:
DownLoad: